Схват маніпулятора
Номер патенту: 51347
Опубліковано: 15.11.2002
Автори: Березнюк Володимир Володимирович, Рудик Юрій Микитович, Гусев Олексій Володимирович, Карпачов Юрій Андрійович

Формула / Реферат
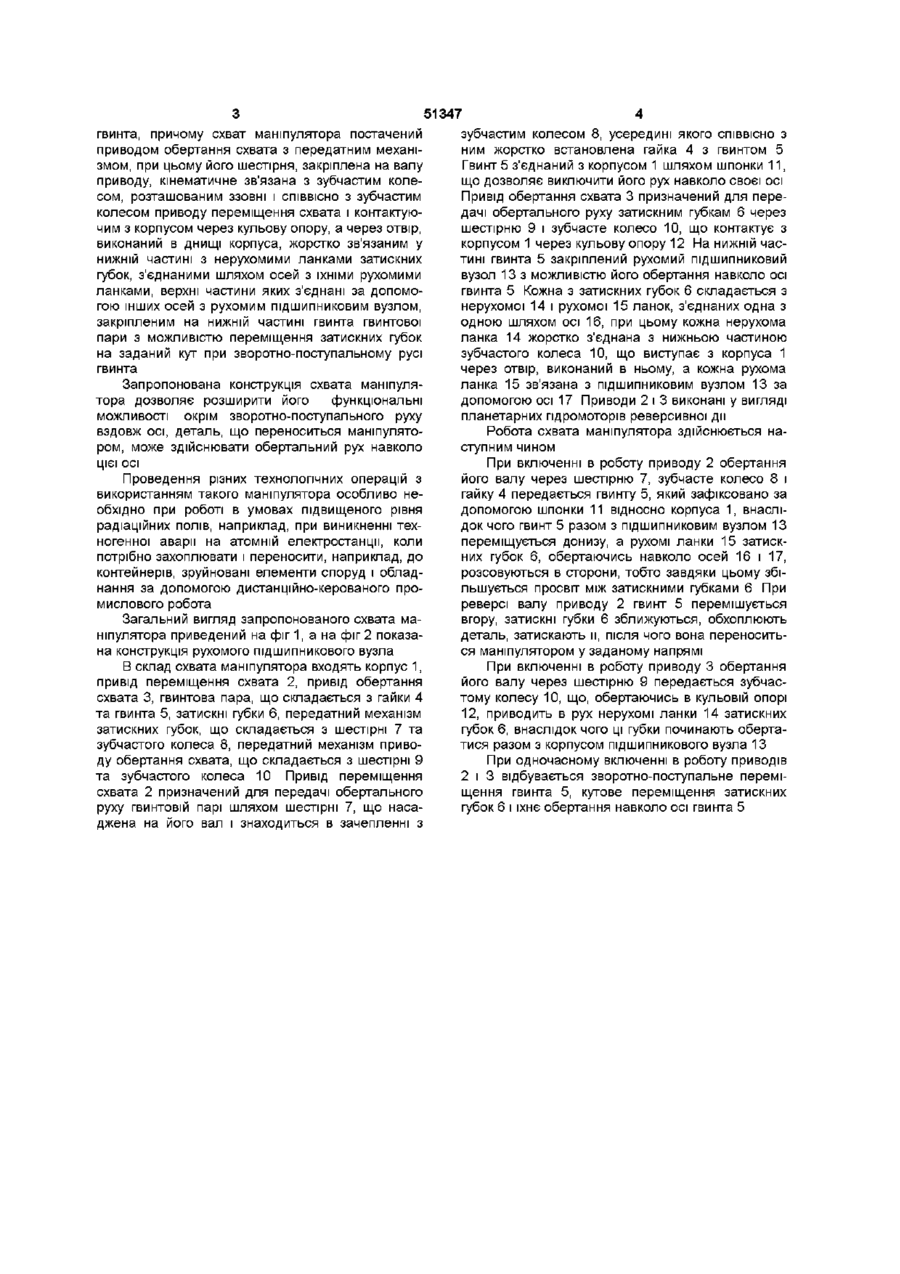
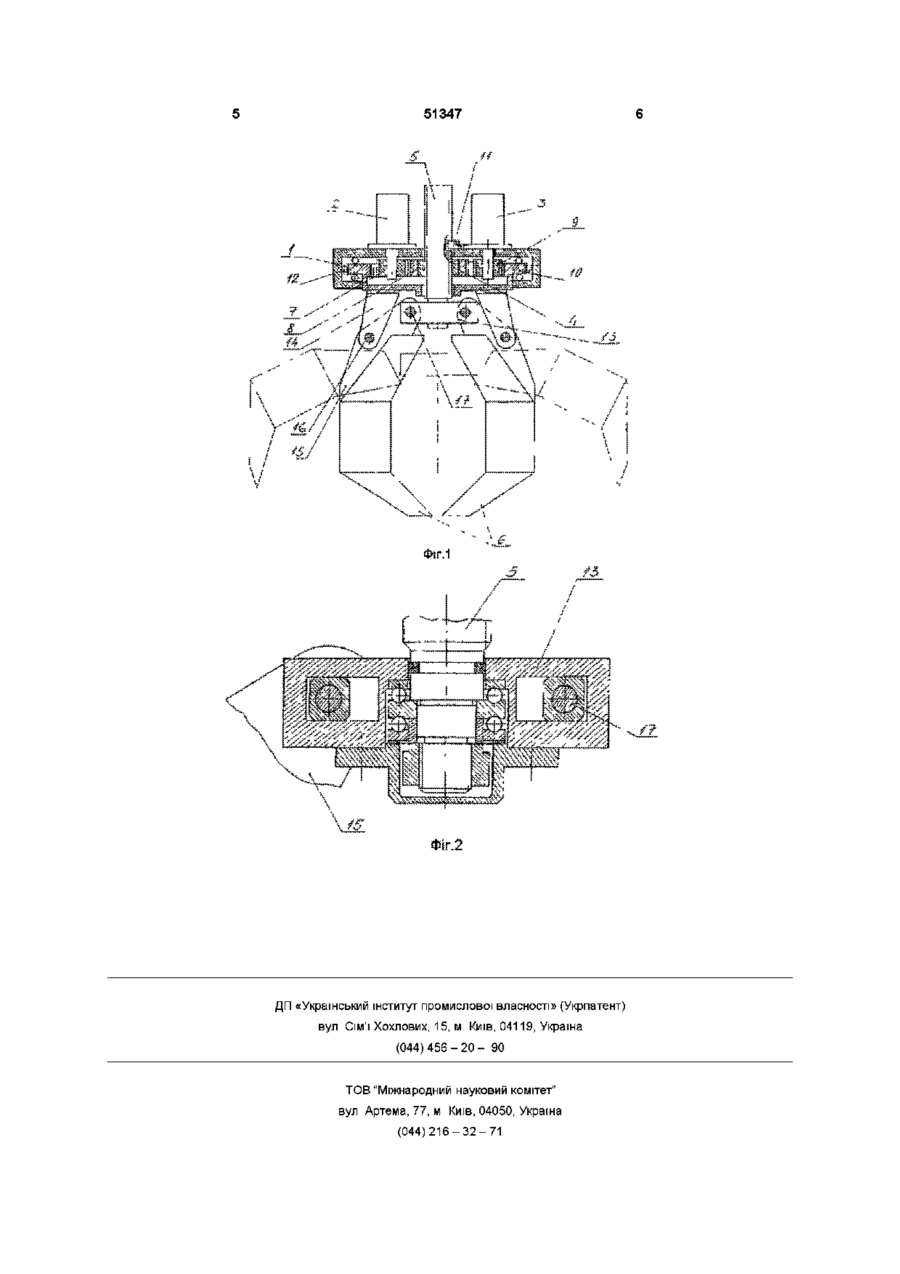
Схват маніпулятора, що містить корпус, привід переміщення схвата, зв'язані з ним через гвинтову пару і передатний механізм затискні губки, який відрізняється тим, що на валу приводу переміщення схвата закріплена шестірня його передатного механізму, що знаходиться в зачепленні з зубчастим колесом, усередині якого співвісно з ним встановлені гайка гвинтової пари і гвинт, зв'язаний з корпусом з можливістю зворотно-поступального руху гвинта, причому схват маніпулятора оснащений приводом обертання схвата з передатним механізмом, при цьому його шестірня, що закріплена на валу приводу, кінематично зв'язана з зубчастим колесом, розташованим ззовні і співвісно з зубчастим колесом приводу переміщення схвата і контактуючим з корпусом через кульову опору, а через отвір, виконаний в днищі корпусу, жорстко зв'язаним у нижній частині з нерухомими ланками затискних губок, з'єднаними через осі з їхніми рухомими ланками, верхні частини яких з'єднані за допомогою інших осей з рухомим підшипниковим вузлом, закріпленим на нижній частині гвинта гвинтової пари з можливістю переміщення затискних губок на заданий кут при зворотно-поступальному русі гвинта.
Текст
Схват маніпулятора, що містить корпус, привід переміщення схвата, зв'язані з ним через гвинтову пару і передатний механізм затискні губки, який відрізняється тим, що на валу приводу переміщення схвата закріплена шестірня його передатного механізму, що знаходиться в зачепленні з зубчастим колесом, усередині якого СПІВВІСНО з ним встановлені гайка гвинтової пари і гвинт, звязании з корпусом з можливістю зворотнопоступального руху гвинта, причому схват маніпулятора оснащений приводом обертання схвата з передатним механізмом, при цьому його шестірня, що закріплена на валу приводу, кінематично зв'язана з зубчастим колесом, розташованим ззовні і СПІВВІСНО з зубчастим колесом приводу переміщення схвата і контактуючим з корпусом через кульову опору, а через отвір, виконаний в днищі корпусу, жорстко зв'язаним у нижній частині з нерухомими ланками затискних губок, з'єднаними через осі з їхніми рухомими ланками, верхні частини яких з'єднані за допомогою інших осей з рухомим підшипниковим вузлом, закріпленим на нижній частині гвинта гвинтової пари з можливістю переміщення затискних губок на заданий кут при зворотно-поступальному русі гвинта Винахід відноситься до галузі машинобудування і може бути використаний у промислових роботах, зокрема - для захоплення та перенесення упакованих в тверду тару матеріалів, шкідливих для здоров'я людини ВІДОМІ захоплюючі пристрої промислових роботів (ас СССР 1535716, кл B25J 15/00, 1990г БИ № 2, а с СССР 1553380, кл B25J 15/00, 1990г, БИ № 12), що складаються з основи з приводом його переміщення, корпуса з затискними губками з можливістю осьового переміщення відносно основи Недоліком цих пристроїв є те, що їхня конструкція дозволяє деталям, що утримуються затискними губками, здійснювати лише зворотнопоступальний рух і виключає обертальний рух Найбільш близьким по технічній сутності до винаходу, що заявляється, є пристрій (а с СССР 1551544 "Схват манипулятора", кл B25J 15/00, 1990г, БИ № 11), що містить встановлений у основі корпус, привід переміщення і зв'язані з ним шляхом гвинтової пари і передатного механізму затискні губки Конструктивні особливості цього пристрою виключають можливість мати другий ступінь свободи затискних губок при захопленні ними деталей, а саме - здійснювати обертальний рух навколо його осі, що у деяких випадках при використанні пристрою є необхідним В основу винаходу покладено задачу вдосконалення схвата маніпулятора шляхом введення в нього приводу обертання схвата з передатним механізмом, а також нового виконання передатних механізмів приводів переміщення і обертання схвата і кріплення затискних губок, що забезпечує підвищення безпеки роботи при захопленні, наприклад, упакованих в тверду тару матеріалів, шкідливих для здоров'я людини (при провертанні заклинених матеріалів), а також підвищує ефективність технологічних операцій Поставлена задача вирішується так, що в схваті маніпулятора, що містить корпус, привід переміщення схвата, зв'язані з ним шляхом гвинтової пари і передатного механізму затискні губки, новим є те, що на валу приводу переміщення схвата закріплена шестірня його передатного механізму, що знаходиться в зачепленні з зубчастим колесом, усередині якого СПІВВІСНО з ним встановлені гайка гвинтової пари і гвинт, зв'язаний з корпусом з можливістю зворотно-поступального руху СО Ю 51347 зубчастим колесом 8, усередині якого СПІВВІСНО З гвинта, причому схват маніпулятора постачений ним жорстко встановлена гайка 4 з гвинтом 5 приводом обертання схвата з передатним механіГвинт 5 з'єднаний з корпусом 1 шляхом шпонки 11, змом, при цьому його шестірня, закріплена на валу що дозволяє виключити його рух навколо своєї осі приводу, кінематичне зв'язана з зубчастим колеПривід обертання схвата 3 призначений для пересом, розташованим ззовні і СПІВВІСНО з зубчастим дачі обертального руху затискним губкам 6 через колесом приводу переміщення схвата і контактуюшестірню 9 і зубчасте колесо 10, що контактує з чим з корпусом через кульову опору, а через отвір, корпусом 1 через кульову опору 12 На нижній часвиконаний в днищі корпуса, жорстко зв'язаним у тині гвинта 5 закріплений рухомий підшипниковий нижній частині з нерухомими ланками затискних вузол 13 з можливістю його обертання навколо осі губок, з'єднаними шляхом осей з їхніми рухомими гвинта 5 Кожна з затискних губок 6 складається з ланками, верхні частини яких з'єднані за допомонерухомої 14 і рухомої 15 ланок, з'єднаних одна з гою інших осей з рухомим підшипниковим вузлом, одною шляхом осі 16, при цьому кожна нерухома закріпленим на нижній частині гвинта гвинтової ланка 14 жорстко з'єднана з нижньою частиною пари з можливістю переміщення затискних губок зубчастого колеса 10, що виступає з корпуса 1 на заданий кут при зворотно-поступальному русі через отвір, виконаний в ньому, а кожна рухома гвинта ланка 15 зв'язана з підшипниковим вузлом 13 за Запропонована конструкція схвата маніпулядопомогою осі 17 Приводи 2 і 3 виконані у вигляді тора дозволяє розширити його функціональні планетарних гідромоторів реверсивної дії можливості окрім зворотно-поступального руху вздовж осі, деталь, що переноситься маніпулятоРобота схвата маніпулятора здійснюється наром, може здійснювати обертальний рух навколо ступним чином цієї осі При включенні в роботу приводу 2 обертання його валу через шестірню 7, зубчасте колесо 8 і Проведення різних технологічних операцій з гайку 4 передається гвинту 5, який зафіксовано за використанням такого маніпулятора особливо недопомогою шпонки 11 відносно корпуса 1, внасліобхідно при роботі в умовах підвищеного рівня док чого гвинт 5 разом з підшипниковим вузлом 13 радіаційних полів, наприклад, при виникненні техпереміщується донизу, а рухомі ланки 15 затискногенної аварії на атомній електростанції, коли них губок 6, обертаючись навколо осей 16 і 17, потрібно захоплювати і переносити, наприклад, до розсовуються в сторони, тобто завдяки цьому збіконтейнерів, зруйновані елементи споруд і обладльшується просвіт між затискними губками 6 При нання за допомогою дистанційно-керованого прореверсі валу приводу 2 гвинт 5 перемішується мислового робота вгору, затискні губки 6 зближуються, обхоплюють Загальний вигляд запропонованого схвата мадеталь, затискають м, після чого вона переноситьніпулятора приведений на фіг 1, а на фіг 2 показася маніпулятором у заданому напрямі на конструкція рухомого підшипникового вузла В склад схвата маніпулятора входять корпус 1, При включенні в роботу приводу 3 обертання привід переміщення схвата 2, привід обертання його валу через шестірню 9 передається зубчассхвата 3, гвинтова пара, що складається з гайки 4 тому колесу 10, що, обертаючись в кульовій опорі та гвинта 5, затискні губки 6, передатний механізм 12, приводить в рух нерухомі ланки 14 затискних затискних губок, що складається з шестірні 7 та губок 6, внаслідок чого ці губки починають обертазубчастого колеса 8, передатний механізм привотися разом з корпусом підшипникового вузла 13 ду обертання схвата, що складається з шестірні 9 При одночасному включенні в роботу приводів та зубчастого колеса 10 Привід переміщення 2 і 3 відбувається зворотно-поступальне перемісхвата 2 призначений для передачі обертального щення гвинта 5, кутове переміщення затискних руху гвинтовій парі шляхом шестірні 7, що насагубок 6 і їхнє обертання навколо осі гвинта 5 джена на його вал і знаходиться в зачепленні з 51347 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюManipulator holder
Автори англійськоюBerezniuk Volodymyr Volodymyrovych, Karpachov Yurii Andriiovych, Rudyk Yurii Mykytovych
Назва патенту російськоюЗахват манипулятора
Автори російськоюБерезнюк Владимир Владимирович, Карпачев Юрий Андреевич, Рудик Юрий Никитович
МПК / Мітки
МПК: B25J 15/00
Мітки: схват, маніпулятора
Код посилання
<a href="https://ua.patents.su/3-51347-skhvat-manipulyatora.html" target="_blank" rel="follow" title="База патентів України">Схват маніпулятора</a>
Схват маніпулятора
Номер патенту: 35903
Опубліковано: 16.04.2001
Автори: Романець Тарас Петрович, Драпак Георгій Мефодійович
МПК: B25J 15/06
Мітки: схват, маніпулятора
Формула / Реферат:
Схват маніпулятора, який містить корпус, присмоктувані, упор та коромисло з'єднане з упором відрізняється тим, що присмоктувані приєднані до повзунів, які нерухомо закріплені на пружному коромислі з можливістю зміни їх положення і розташовані на штангах що жорстко приєднані до корпусу, а жорсткий упор встановлено на пружному коромислі з можливістю зміни його висоти і положення, і оснащено плоскою площиною розташованою паралельно повзунам з...
Підкладочний килимок до комп’ютерного маніпулятора типу “миша”
Номер патенту: 1141
Опубліковано: 15.01.2002
Автор: Кравцов Сергій Георгійович
МПК: G06T 11/80, G06F 3/033
Мітки: миша, маніпулятора, типу, килимок, комп'ютерного, підкладочний
Формула / Реферат:
Підкладочний килимок до комп'ютерного маніпулятора типу "миша", що має площинну форму, який відрізняється тим, що матеріалом для його виготовлення є пробкова прескомпозиція на основі кори пробкового дуба.
Вакуумний схват

Номер патенту: 33533
Опубліковано: 15.02.2001
Автори: Романець Тарас Петрович, Драпак Георгій Мефодійович
МПК: B25J 15/06
Текст:
...як деталі 16 досягнуть присмок тувачів 11 обох пневмокамер, тиск в пневмокамерах 9 і 10 знімається, і сильфони 13 під дією пружних сил розтискаються. При цьому присмоктувачі 11 захоплюють верхню деталь стопи. Після чого схва т починає рухатись догори, а блок штанг 5, 6 (фіг. 3) повертається в шарнірі 2 за годинниковою стрілкою у бік більшого плеча "В" штанг 5, 6. При цьому відбувається відгинання догори краю захопленої присмоктувачами 11...
Пристрій для обертання виконавчого органу маніпулятора
Номер патенту: 15436
Опубліковано: 30.06.1997
Автор: Свід Леонід Прокопович
МПК: B25J 9/00, E21B 19/00
Мітки: органу, обертання, пристрій, маніпулятора, виконавчого
Формула / Реферат:
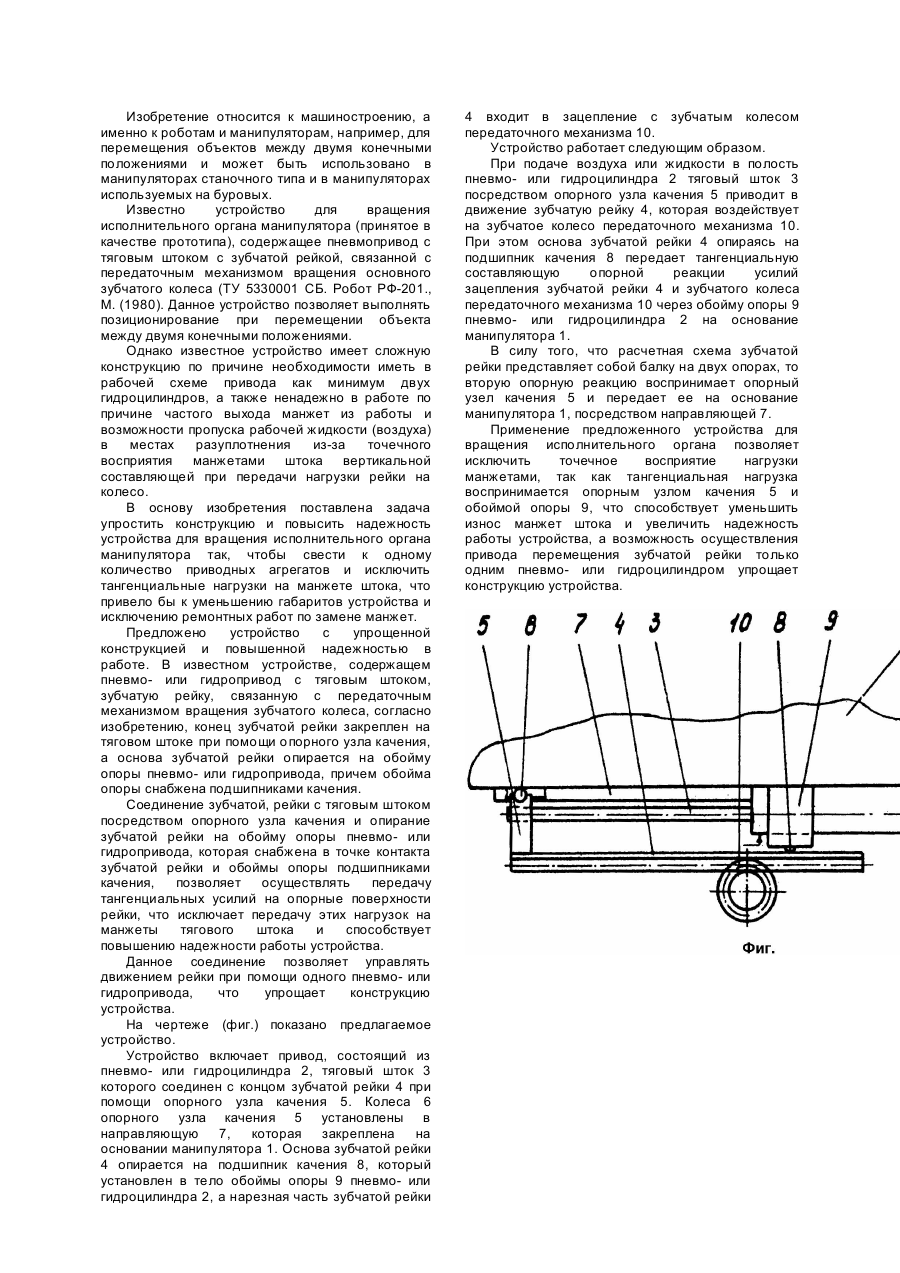
Устройство для вращения исполнительного органа манипулятора, содержащее пневмо- или гидропривод с тяговым штоком, зубчатую рейку, связанную с передаточным механизмом вращения зубчатого колеса, отличающееся тем, что конец зубчатой рейки закреплен на тяговом штоке при помощи опорного узла качения, а основа зубчатой рейки опирается на обойму опоры пневмо- или гидропривода, причем обойма опоры пневмо- или гидропривода снабжена подшипниками...
Захват маніпулятора

Номер патенту: 7396
Опубліковано: 29.09.1995
Автори: Брязкало Вадим Вадимович, Ткаченко Іван Павлович, Марченко Володимир Петрович, Цейтлін Генріх Юхимович
МПК: B25J 15/00, A21C 15/00
Мітки: захват, маніпулятора
Формула / Реферат:
Захват манипулятора, преимущественно для пирожных, содержащий захватные головки, смонтированные посредством штанг на шарнирно-рычажном механизме и имеющие привод для изменения расстояния между ними, отличающийся тем, что, с целью повышения надежности работы, каждая захватная головка содержит пару двуплечих рычагов, закрепленных на соответствующей штанге шарнирно-рычажного механизма, при этом захватные головки снабжены общим приводом для...
Попередній патент: Спосіб обмеження струмів короткого замикання і пристрій для його реалізації
Наступний патент: Спосіб корекції психічних розладів у онкологічних хворих
Випадковий патент: Спосіб виготовлення фанери