Штабелюючий пристрій
Номер патенту: 5321
Опубліковано: 28.12.1994
Автори: Першин Сергій Володимирович, Карлов Антон Георгійович, Сухоносенко Володимир Борисович, Крючков Іван Васильович, Рисін Ілля Євгенович
Формула / Реферат
Штабелирующее устройство, содержащее тележку с размещенными на рельсах ходовыми колесами и колоннами, установленную с возможностью вертикального перемещения по колоннам грузовую платформу, на которой размещены телескопические захваты, приводные механизмы передвижения тележки, вертикального перемещения грузовой платформы и выдвижения телескопических захватов и приспособление для управления упомянутыми механизмами, включающее в себя блок задания программ, выполненный в виде стационарной ЭВМ, который включен в цепь управления этими механизмами через бортовой контроллер, отличающееся тем, что на балке тележки консольне закреплена упругая пластина с прикрепленными к обеим ее плоскостям со стороны свободного конца штифтами, охватываемыми пружинами, одними концами связанными с соответствующими сторонами пластины, а на корпусе редуктора привода механизма передвижения тележки смонтирован вильчатый упор, охватывающий пластину со стороны свободного конца и связанный со вторыми концами упомянутых пружин, приспособление для управления приводными механизмами снабжено датчиками деформации пластины, выполненными индуктивными или тензометрическими, при этом, контроллер выполнен с пороговым блоком, к входу которого подключены выходы упомянутых датчиков, а к выходу - цепи управления электродвигателем и тормозом привода механизма передвижения тележки.
2. Штабелирующее устройство по п. 1, отличающееся тем, что приспособление для управления приводными механизмами снабжено датчиком ускорения тележки, один выход которого подключен к входу контроллера, для корректировки сигналов датчиков деформации упругой пластины, а другой - к входу записи блока памяти стационарной ЭВМ.
Текст
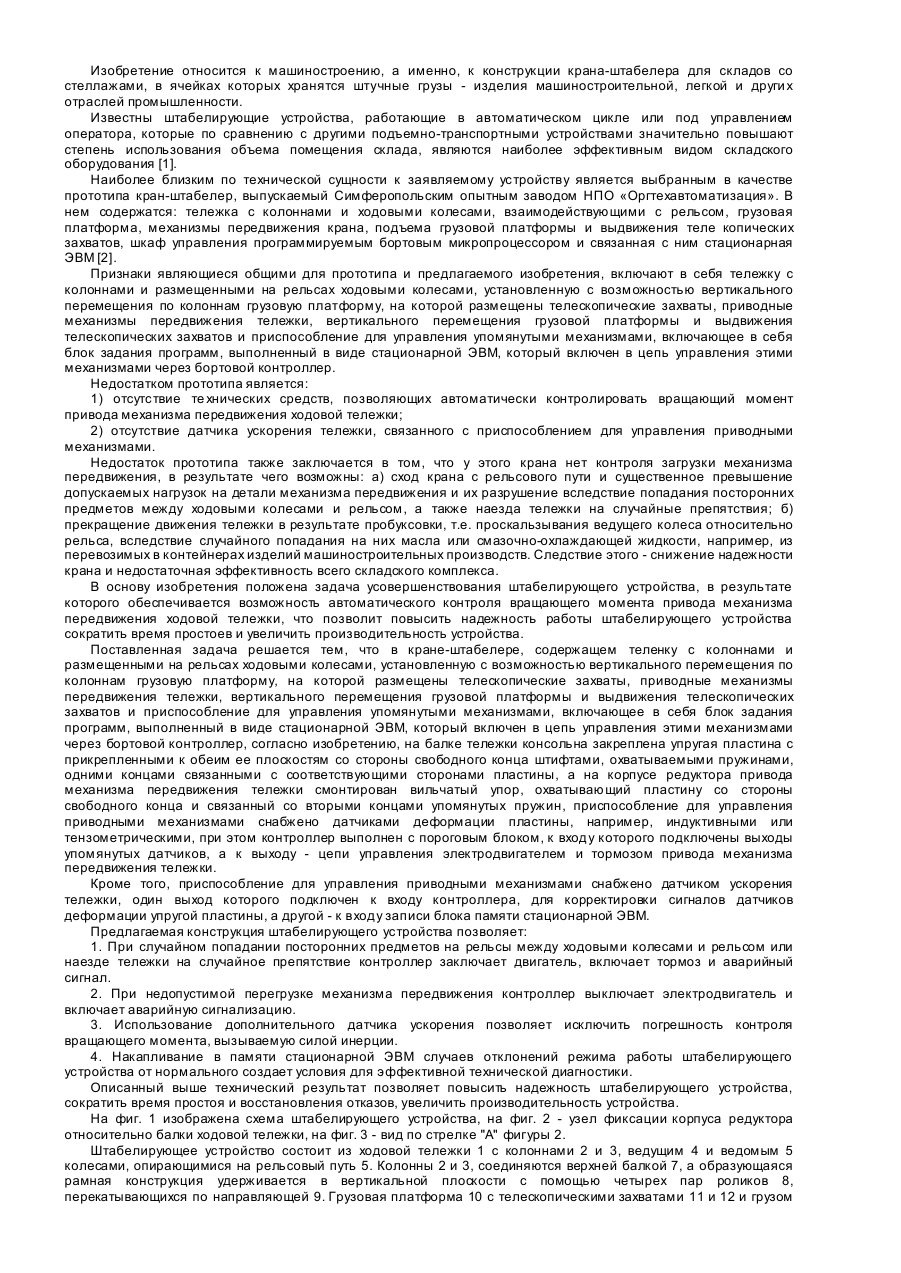
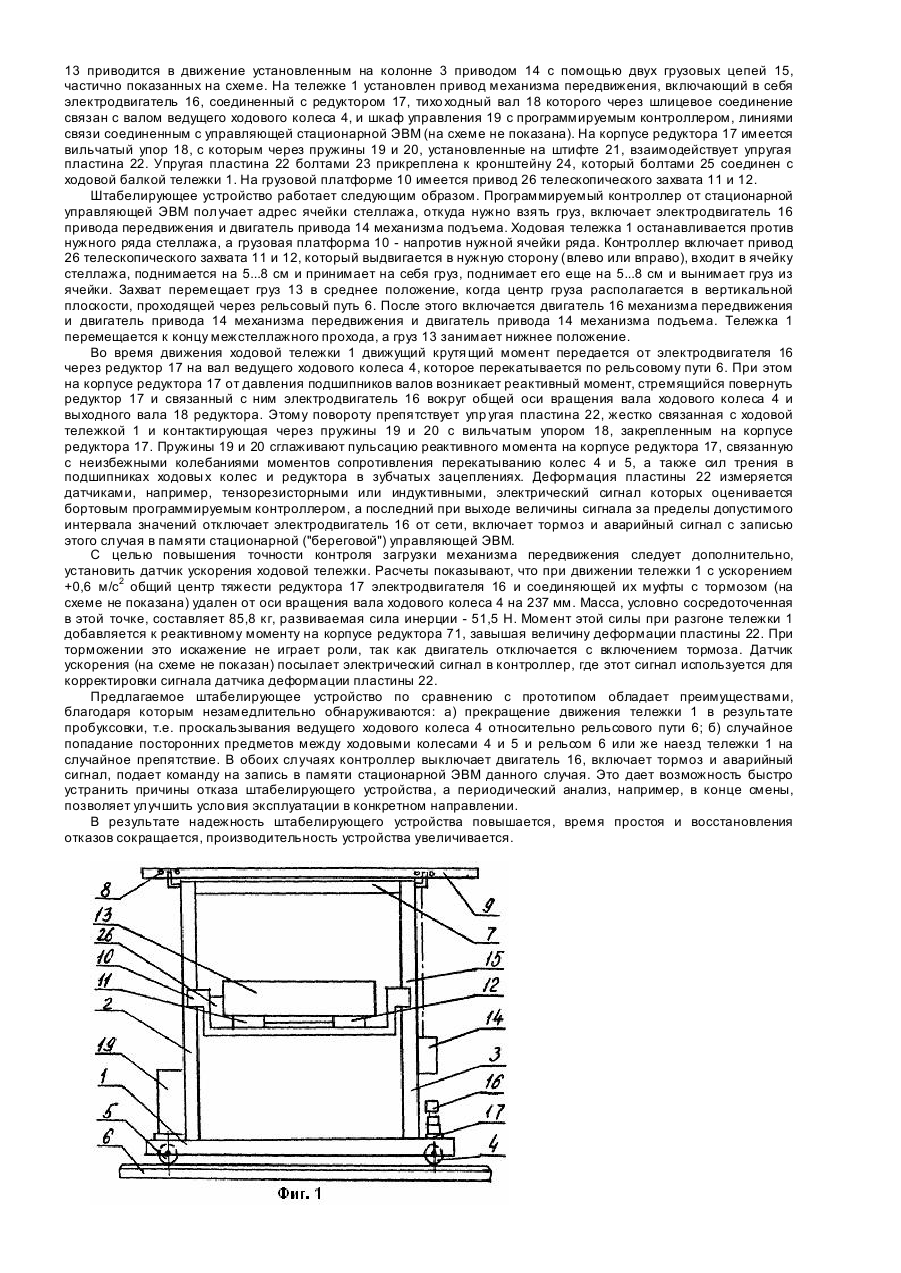
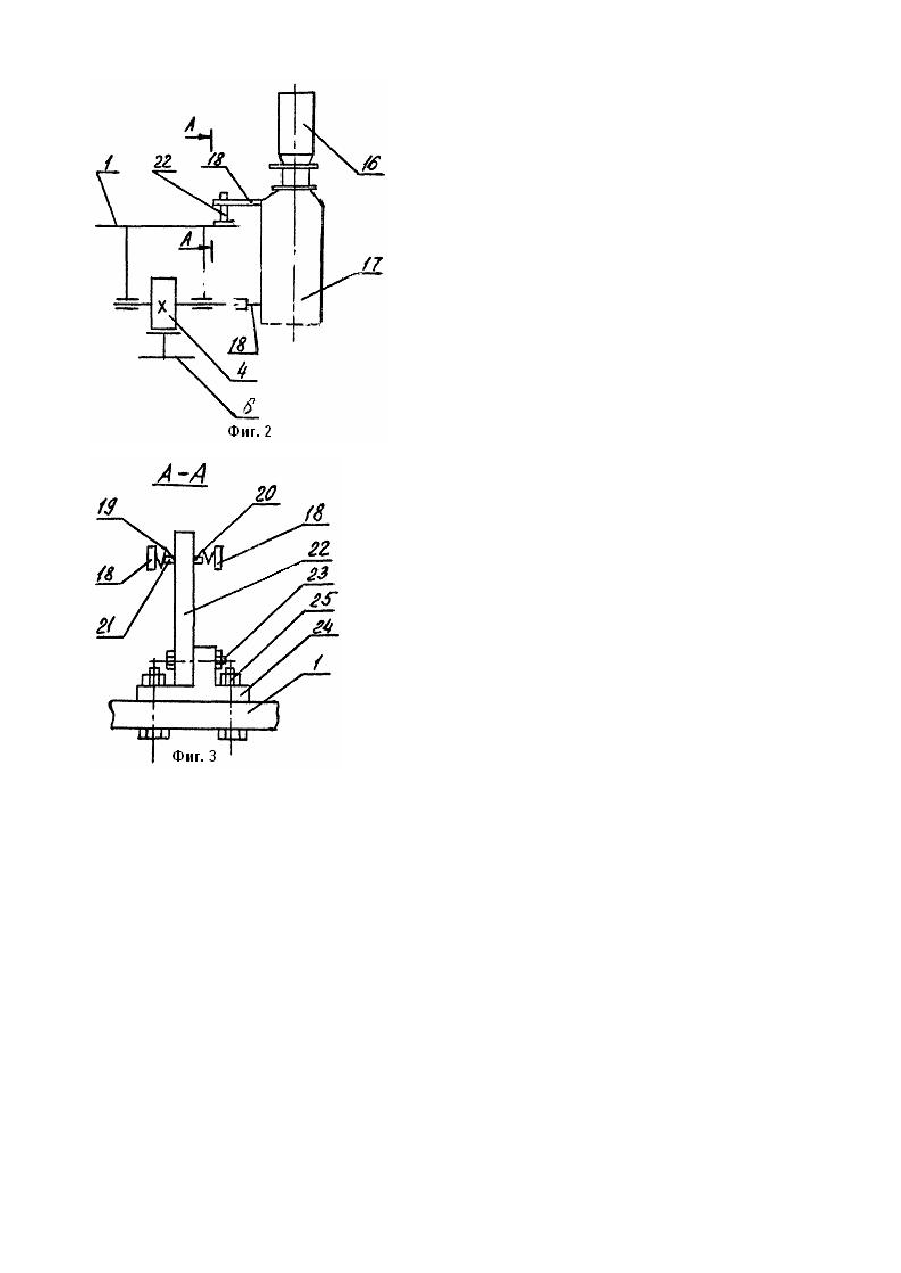
Изобретение относится к машиностроению, а именно, к конструкции крана-штабелера для складов со стеллажами, в ячейках которых хранятся штучные грузы - изделия машиностроительной, легкой и други х отраслей промышленности. Известны штабелирующие устройства, работающие в автоматическом цикле или под управлением оператора, которые по сравнению с другими подъемно-транспортными устройствами значительно повышают степень использования объема помещения склада, являются наиболее эффективным видом складского оборудования [1]. Наиболее близким по технической сущности к заявляемому устройству является выбранным в качестве прототипа кран-штабелер, выпускаемый Симферопольским опытным заводом НПО «Оргтехавтоматизация». В нем содержатся: тележка с колоннами и ходовыми колесами, взаимодействующими с рельсом, грузовая платформа, механизмы передвижения крана, подъема грузовой платформы и выдвижения теле копических захватов, шкаф управления программируемым бортовым микропроцессором и связанная с ним стационарная ЭВМ [2]. Признаки являющиеся общими для прототипа и предлагаемого изобретения, включают в себя тележку с колоннами и размещенными на рельсах ходовыми колесами, установленную с возможностью вертикального перемещения по колоннам грузовую платформу, на которой размещены телескопические захваты, приводные механизмы передвижения тележки, вертикального перемещения грузовой платформы и выдвижения телескопических захватов и приспособление для управления упомянутыми механизмами, включающее в себя блок задания программ, выполненный в виде стационарной ЭВМ, который включен в цепь управления этими механизмами через бортовой контроллер. Недостатком прототипа является: 1) отсутствие те хнических средств, позволяющих автоматически контролировать вращающий момент привода механизма передвижения ходовой тележки; 2) отсутствие датчика ускорения тележки, связанного с приспособлением для управления приводными механизмами. Недостаток прототипа также заключается в том, что у этого крана нет контроля загрузки механизма передвижения, в результате чего возможны: а) сход крана с рельсового пути и существенное превышение допускаемых нагрузок на детали механизма передвижения и их разрушение вследствие попадания посторонних предметов между ходовыми колесами и рельсом, а также наезда тележки на случайные препятствия; б) прекращение движения тележки в результате пробуксовки, т.е. проскальзывания ведущего колеса относительно рельса, вследствие случайного попадания на них масла или смазочно-охлаждающей жидкости, например, из перевозимых в контейнерах изделий машиностроительных производств. Следствие этого - снижение надежности крана и недостаточная эффективность всего складского комплекса. В основу изобретения положена задача усовершенствования штабелирующего устройства, в результате которого обеспечивается возможность автоматического контроля вращающего момента привода механизма передвижения ходовой тележки, что позволит повысить надежность работы штабелирующего устройства сократить время простоев и увеличить производительность устройства. Поставленная задача решается тем, что в кране-штабелере, содержащем теленку с колоннами и размещенными на рельсах ходовыми колесами, установленную с возможностью вертикального перемещения по колоннам грузовую платформу, на которой размещены телескопические захваты, приводные механизмы передвижения тележки, вертикального перемещения грузовой платформы и выдвижения телескопических захватов и приспособление для управления упомянутыми механизмами, включающее в себя блок задания программ, выполненный в виде стационарной ЭВМ, который включен в цепь управления этими механизмами через бортовой контроллер, согласно изобретению, на балке тележки консольна закреплена упругая пластина с прикрепленными к обеим ее плоскостям со стороны свободного конца штифтами, охватываемыми пружинами, одними концами связанными с соответствующими сторонами пластины, а на корпусе редуктора привода механизма передвижения тележки смонтирован вильчатый упор, охватывающий пластину со стороны свободного конца и связанный со вторыми концами упомянутых пружин, приспособление для управления приводными механизмами снабжено датчиками деформации пластины, например, индуктивными или тензометрическими, при этом контроллер выполнен с пороговым блоком, к входу которого подключены выходы упомянутых датчиков, а к выходу - цепи управления электродвигателем и тормозом привода механизма передвижения тележки. Кроме того, приспособление для управления приводными механизмами снабжено датчиком ускорения тележки, один выход которого подключен к входу контроллера, для корректировки сигналов датчиков деформации упругой пластины, а другой - к входу записи блока памяти стационарной ЭВМ. Предлагаемая конструкция штабелирующего устройства позволяет: 1. При случайном попадании посторонних предметов на рельсы между ходовыми колесами и рельсом или наезде тележки на случайное препятствие контроллер заключает двигатель, включает тормоз и аварийный сигнал. 2. При недопустимой перегрузке механизма передвижения контроллер выключает электродвигатель и включает аварийную сигнализацию. 3. Использование дополнительного датчика ускорения позволяет исключить погрешность контроля вращающего момента, вызываемую силой инерции. 4. Накапливание в памяти стационарной ЭВМ случаев отклонений режима работы штабелирующего устройства от нормального создает условия для эффективной технической диагностики. Описанный выше технический результат позволяет повысить надежность штабелирующего устройства, сократить время простоя и восстановления отказов, увеличить производительность устройства. На фиг. 1 изображена схема штабелирующего устройства, на фиг. 2 - узел фиксации корпуса редуктора относительно балки ходовой тележки, на фиг. 3 - вид по стрелке "А" фигуры 2. Штабелирующее устройство состоит из ходовой тележки 1 с колоннами 2 и 3, ведущим 4 и ведомым 5 колесами, опирающимися на рельсовый путь 5. Колонны 2 и 3, соединяются верхней балкой 7, а образующаяся рамная конструкция удерживается в вертикальной плоскости с помощью четырех пар роликов 8, перекатывающихся по направляющей 9. Грузовая платформа 10 с телескопическими захватами 11 и 12 и грузом 13 приводится в движение установленным на колонне 3 приводом 14 с помощью двух грузовых цепей 15, частично показанных на схеме. На тележке 1 установлен привод механизма передвижения, включающий в себя электродвигатель 16, соединенный с редуктором 17, тихо ходный вал 18 которого через шлицевое соединение связан с валом ведущего ходового колеса 4, и шкаф управления 19 с программируемым контроллером, линиями связи соединенным с управляющей стационарной ЭВМ (на схеме не показана). На корпусе редуктора 17 имеется вильчатый упор 18, с которым через пружины 19 и 20, установленные на штифте 21, взаимодействует упругая пластина 22. Упругая пластина 22 болтами 23 прикреплена к кронштейну 24, который болтами 25 соединен с ходовой балкой тележки 1. На грузовой платформе 10 имеется привод 26 телескопического захвата 11 и 12. Штабелирующее устройство работает следующим образом. Программируемый контроллер от стационарной управляющей ЭВМ получает адрес ячейки стеллажа, откуда нужно взять груз, включает электродвигатель 16 привода передвижения и двигатель привода 14 механизма подъема. Ходовая тележка 1 останавливается против нужного ряда стеллажа, а грузовая платформа 10 - напротив нужной ячейки ряда. Контроллер включает привод 26 телескопического захвата 11 и 12, который выдвигается в нужную сторону (влево или вправо), входит в ячейку стеллажа, поднимается на 5...8 см и принимает на себя груз, поднимает его еще на 5...8 см и вынимает груз из ячейки. Захват перемещает груз 13 в среднее положение, когда центр груза располагается в вертикальной плоскости, проходящей через рельсовый путь 6. После этого включается двигатель 16 механизма передвижения и двигатель привода 14 механизма передвижения и двигатель привода 14 механизма подъема. Тележка 1 перемещается к концу межстеллажного прохода, а груз 13 занимает нижнее положение. Во время движения ходовой тележки 1 движущий крутя щий момент передается от электродвигателя 16 через редуктор 17 на вал ведущего ходового колеса 4, которое перекатывается по рельсовому пути 6. При этом на корпусе редуктора 17 от давления подшипников валов возникает реактивный момент, стремящийся повернуть редуктор 17 и связанный с ним электродвигатель 16 вокруг общей оси вращения вала ходового колеса 4 и выходного вала 18 редуктора. Этому повороту препятствует упр угая пластина 22, жестко связанная с ходовой тележкой 1 и контактирующая через пружины 19 и 20 с вильчатым упором 18, закрепленным на корпусе редуктора 17. Пружины 19 и 20 сглаживают пульсацию реактивного момента на корпусе редуктора 17, связанную с неизбежными колебаниями моментов сопротивления перекатыванию колес 4 и 5, а также сил трения в подшипниках ходовы х колес и редуктора в зубчатых зацеплениях. Деформация пластины22 измеряется датчиками, например, тензорезисторными или индуктивными, электрический сигнал которых оценивается бортовым программируемым контроллером, а последний при выходе величины сигнала за пределы допустимого интервала значений отключает электродвигатель 16 от сети, включает тормоз и аварийный сигнал с записью этого случая в памяти стационарной ("береговой") управляющей ЭВМ. С целью повышения точности контроля загрузки механизма передвижения следует дополнительно, установить датчик ускорения ходовой тележки. Расчеты показывают, что при движении тележки 1 с ускорением +0,6 м/с2 общий центр тяжести редуктора 17 электродвигателя 16 и соединяющей их муфты с тормозом (на схеме не показана) удален от оси вращения вала ходового колеса 4 на 237 мм. Масса, условно сосредоточенная в этой точке, составляет 85,8 кг, развиваемая сила инерции - 51,5 Н. Момент этой силы при разгоне тележки 1 добавляется к реактивному моменту на корпусе редуктора 71, завышая величину деформации пластины 22. При торможении это искажение не играет роли, так как двигатель отключается с включением тормоза. Датчик ускорения (на схеме не показан) посылает электрический сигнал в контроллер, где этот сигнал используется для корректировки сигнала датчика деформации пластины 22. Предлагаемое штабелирующее устройство по сравнению с прототипом обладает преимуществами, благодаря которым незамедлительно обнаруживаются: а) прекращение движения тележки 1 в результате пробуксовки, т.е. проскальзывания ведущего ходового колеса 4 относительно рельсового пути 6; б) случайное попадание посторонних предметов между ходовыми колесами 4 и 5 и рельсом 6 или же наезд тележки 1 на случайное препятствие. В обоих случаях контроллер выключает двигатель 16, включает тормоз и аварийный сигнал, подает команду на запись в памяти стационарной ЭВМ данного случая. Это дает возможность быстро устранить причины отказа штабелирующего устройства, а периодический анализ, например, в конце смены, позволяет улучшить усло вия эксплуатации в конкретном направлении. В результате надежность штабелирующего устройства повышается, время простоя и восстановления отказов сокращается, производительность устройства увеличивается.
ДивитисяДодаткова інформація
Назва патенту англійськоюPiling device
Автори англійськоюKarlov Anton Heorhiiovych, Kriuchkov Ivan Vasyliovych, Pershyn Serhii Volodymyrovych, Sukhonosenko Volodymyr Borysovych, Rysin Illia Yevhenovych
Назва патенту російськоюШтабелирующее устройство
Автори російськоюКарлов Антон Георгиевич, Крючков Иван Васильевич, Першин Сергей Владимирович, Сухоносенко Владимир Борисович, Рысин Илья Евгеньевич
МПК / Мітки
МПК: B65G 61/00, B65G 1/06
Мітки: пристрій, штабелюючий
Код посилання
<a href="https://ua.patents.su/3-5321-shtabelyuyuchijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Штабелюючий пристрій</a>
Вантажний візок крана

Номер патенту: 4507
Опубліковано: 27.12.1994
Автор: Георгієвський Володимир Володимирович
МПК: B66C 11/00
Мітки: візок, вантажний, крана
Формула / Реферат:
Грузовая тележка крана, содержащая барабан и обоймы грузовых блоков, установленные на одной оси, и механизм передвижения тележки по рельсам, отличающаяся тем, что, с целью расширения функциональных возможностей путем использования барабана для передвижения тележки, на наружной поверхности барабана на его концах выполнены кольцевые дорожки.
Механізм пересування крана
Номер патенту: 2292
Опубліковано: 26.12.1994
Автори: Сербаєв Петро Миколайович, Бик Аркадій Рувимович, Белов Олександр Іванович
МПК: B66C 9/00
Мітки: пересування, крана, механізм
Формула / Реферат:
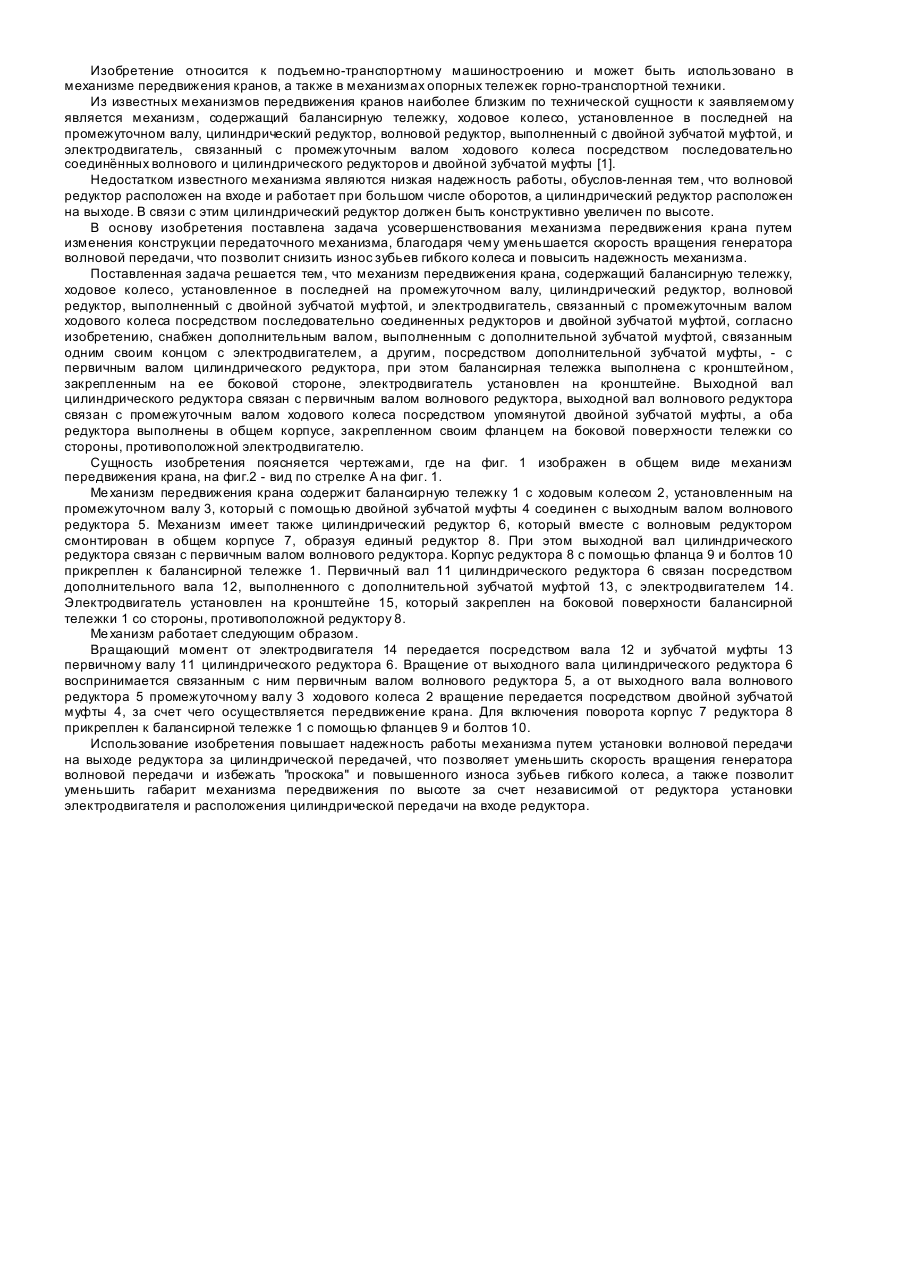
Механизм передвижения крана, со держащий балансирную тележку, ходовое колесо, установленное в последней на промежуточном валу, цилиндрический редуктор, волновой редуктор, выполненный с двойной зубчатой муфтой, и электродвигатель, связанный с промежуточным валом ходового колеса посредством последовательно соединенных редукторов и двойной зубчатой муфтой, отличающийся тем, что он снабжен дополнительным валом, выполненным с дополнительной...
Мостовий кран
Номер патенту: 4503
Опубліковано: 27.12.1994
Автор: Кролюк Жорж Захарович
МПК: B66C 17/00
Формула / Реферат:
Мостовой кран, содержащий пролетную балку коробчатого сечения, на которой установлены двутавровая направляющая и ходовой рельс, консольную грузовую тележку с опорными ходовыми и удерживающими колесами, перемещающимися по двутавровой направляющей и смонтированными на балансирных каретках, связанных шарнирными тягами с рамой грузовой тележки, отличающийся тем, что, с целью упрощения конструкции и снижения вертикальных нагрузок, действующих...
Вантажний візок крана мостового типу
Номер патенту: 4350
Опубліковано: 27.12.1994
Автори: Бик Аркадій Рувимович, Олімпієв Аркадій Григорович, Філь Леонід Андрійович
МПК: B66C 7/00, B66C 11/00
Мітки: крана, типу, мостового, візок, вантажний
Формула / Реферат:
1. Грузовая тележка крана мостового типа, содержащая связанные между собой опорную часть, включающую продольные балки с установленными в них катками механизма передвижения, раму грузоподъемного механизма, которая смещена вниз относительно опорной части, отличающаяся тем, что она содержит по крайней мере две пары S-образных кронштейнов, торцы верхних горизонтальных полок которых жестко соединены с продольными балками, а нижние торцы...
Пристрій для переміщення сирних блоків
Номер патенту: 2930
Опубліковано: 26.12.1994
Автори: Зоря Володимир Григорович, Плакасов Олег Євгенович, Поляков Євген Васильович
МПК: A01J 25/00
Мітки: сирних, пристрій, блоків, переміщення
Формула / Реферат:
Устройство для перемещения сырных блоков, содержащее направляющую с установленной на ней тележкой, включающей корпус, привод перемещения тележки по направляющей, механизм подъема сырных блоков в виде связанных между собой привода механизма, кривошипа, шатуна и ползуна с закрепленным на нем схватом, отличающееся тем, что механизм подъема сырных блоков снабжен закрепленной на корпусе тележки зубчатой рейкой, а также дополнительным ползуном с...
Попередній патент: Спосіб електротермотренування інтегральних мікросхем
Наступний патент: Електрозапальник
Випадковий патент: Спосіб індукційного переплаву металів та сплавів