Мобільний робот

Формула / Реферат
Мобільний робот, оснащений системами приводу і керування, а також маніпулятором, розміщеними на мобільній гусеничній платформі, що має передню гусеницю зі змінюваним кутом нахилу, призначений для нейтралізації підривних пристроїв і для проведення експертних перевірок, який відрізняється тим, що передня гусениця (2) оснащена натяжним пристроєм (1), що має телескопічний кронштейн (18'), з'єднаний із втулкою (13), у якій розміщені підшипники їздових коліс (4), і з зміцнювальними консолями (14), при цьому зовнішній елемент (18) телескопічного кронштейна (18') оснащений тримачами (10), в які вставлені валки (8), що передають приводний момент на передню гусеницю (2), та у яких розміщена консоль (7) у формі трикутника, причому зовнішній елемент (18) телескопічного кронштейна (18') оснащено тримачем для камери (19), призначеної для спостереження за навколишнім оточенням робота (27), і внутрішнім обмежником (25), у який упирається натяжний гвинт (9), при цьому внутрішній елемент(15), зафіксований відносно зовнішнього елемента (18) телескопічного кронштейна (18') за допомогою притискного гвинта (16), оснащений на його передньому кінці елементом (20), у якому закріплені осі (6) передніх коліс, що блокуються елементом (21), і має наскрізний отвір для натяжного гвинта (9), що фіксується відносно внутрішнього елемента (15) притискним гвинтом (24) і взаємодіє з гайкою (26), розміщеною на іншому кінці внутрішнього елемента (15) телескопічного кронштейна (18').
Текст
Мобільний робот, оснащений системами приводу і керування, а також маніпулятором, розміщеними на мобільній гусеничній платформі, що має передню гусеницю зі змінюваним кутом нахилу, призначений для нейтралізації підривних пристроїв і для проведення експертних перевірок, який відрізняється тим, що передня гусениця (2) C2 2 (19) 1 3 експлуатації гусениця, що набігає, піддається розтяганню, що призводить до порушення функціональних характеристик робота, що неприпустимо при демонтажі підривних пристроїв. Відновлення необхідного ступеня натягу гусениці, що набігає, вимагає використання зовнішніх пристосувань. Задачею винаходу є покращання системи керування та маніпулювання робота. Ця задача здійснюється тим, що мобільний робот, оснащено системами приводу і керування, а також маніпулятором, розміщеними на мобільній гусеничній платформі, що має передню гусеницю зі змінюваним кутом нахилу, призначений для нейтралізації підривних пристроїв і для проведення експертних перевірок, при чому відповідно до винаходу передня гусениця оснащена натяжним пристроєм, що має телескопічний кронштейн, з'єднаний із втулкою, у якій розміщені підшипники їздових коліс, і з зміцнювальними консолями, при цьому зовнішній елемент телескопічного кронштейна оснащений тримачами, в які вставлені валки, які передають приводний момент на передню гусеницю, та у яких розміщена консоль у формі трикутника, причому зовнішній елемент телескопічного кронштейна оснащений тримачем для камери, призначеної для спостереження за навколишнім оточенням робота, і внутрішнім обмежником, у який упирається натяжний гвинт, при цьому внутрішній елемент зафіксований відносно зовнішнього елемента телескопічного кронштейну за допомогою притискного гвинта і оснащений на його передньому кінці елементом, у якому закріплені осі передніх коліс, що блокуються елементом, і має наскрізний отвір для натяжного гвинта, що фіксується відносно внутрішнього елемента притискним гвинтом і взаємодіє з гайкою, розміщеною на іншому кінці внутрішнього елемента телескопічного кронштейну. У якому закріплені осі передніх коліс, що блокуються елементом, і має наскрізний отвір для натяжного гвинта, що фіксується відносно внутрішнього кронштейна притискним гвинтом і взаємодіє з гайкою, розміщеною на іншому кінці елемента телескопічного кронштейну. Сутність винаходу пояснюється за допомогою фігур. На Фіг.1 надано загальний вигляд мобільного робота. На Фіг.2 - надано вигляд збоку гусениці в ізометрії, що набігає, з натяжним пристроєм . На Фіг.3 - зображено вигляд збоку натяжного пристрою гусениці в ізометрії. На Фіг.4 - зображено вигляд збоку натяжного пристрою згідно Фіг.3. На Фіг.5 - зображено натяжний пристрій згідно Фіг.4, вигляд із протилежної сторони. На Фіг.6 - надано натяжний пристрій гусениці в розібраному вигляді. Мобільний робот 27 оснащено гусеничною системою переміщення, що складається з передньої гусениці 2, що набігає, зі змінним кутом нахилу, оснащеної натяжним пристроєм 1. Натяжний пристрій 1 передньої гусениці 2 оснащено телескопічним кронштейном 18', з'єднаним із втулкою 13, у якій закріплено підшипники їздових коліс 4, і з змі 93038 4 цнювальними консолями 14. Зовнішній елемент 18 телескопічного кронштейну 18' оснащено тримачами 10, у яких розміщені ролики 8, що передають приводний момент на передню гусеницю 2. На тримачах 10 закріплена також консоль 7 у формі трикутника. Зовнішній елемент 18 телескопічного кронштейну 18' оснащений тримачем 3 для камери 19, що призначена для спостереження за навколишнім оточенням робота 27. Зовнішній елемент 18 телескопічного кронштейна 18' має розміщений усередині нього обмежник 25, у який упирається натяжний гвинт 9. Внутрішній елемент 15, що фіксується відносно зовнішнього елемента 18 телескопічного кронштейну 18' притискним гвинтом 16, оснащений розміщеним на його передньому кінці елементом 20, у якому закріплені осі 6 передніх коліс 4, що фіксуються елементом 21. Крім того, внутрішній елемент 15 телескопічного кронштейна 18' має наскрізний отвір для натяжного гвинта 9, що фіксується відносно внутрішнього елемента 15 натяжним гвинтом 24 і взаємодіє з гайкою 26, розміщеною на іншому кінці елемента 15 телескопічного кронштейна 18'. Внутрішній елемент 15 і зовнішній елемент 18 телескопічного кронштейна 18' мають у поперечному перерізі форму прямокутника. Зовнішній елемент 18 телескопічного кронштейна 18' оснащений закріпленою (наприклад, звареним з'єднанням) у його передній частині прямокутною накладкою 17, що має наскрізний різьбовий отвір, у яке загвинчується стопорний гвинт 16, що запобігає взаємному переміщенню зовнішнього 18 і внутрішнього 15 елементів телескопічного кронштейна 18'. Внутрішній елемент 15 телескопічного кронштейна 18' оснащений закріпленою в його передній частині консоллю 20, до якої прикріплена вісь 6 передніх їздових коліс і яка фіксується за допомогою обмежника 21. Консоль 20 має також наскрізний нерізьбовий отвір, через який проходить натяжний гвинт 9, що фіксується за допомогою гвинта 23, що вгвинчується в консоль 20. Зовнішній елемент 18 телескопічного кронштейна 18' має тримачі 10, які закріплені на ньому з певним кроком та призначені для закріплення роликів 8, які передають приводний момент на передню гусеницю 2 з метою її підйому або опускання. Щоб уникнути випадання роликів 8 із тримача 10 вони зафіксовані блокувальними елементами 11 і притискними гвинтами 12. Блокувальні елементи 11 виключають радіальне переміщення роликів 8, а притискні гвинти 12 - переміщення в осьовому напрямку. Зовнішній елемент 18 телескопічного кронштейна 18' жорстко, наприклад, за допомогою приварних розпірок 14, з'єднаний із втулкою 13, у якій розміщений шарикопідшипник їздових коліс. До зовнішнього елемента 18 телескопічного кронштейна 18' жорстко, наприклад за допомогою зварювання, прикріплений тримач 22 відеокамери 19. Відеокамера 19 закріплюється на тримачі 22 двома кріпильними гвинтами 23, вона призначена для спостереження за навколишнім оточенням робота 27. Внутрішній елемент 15 телескопічного кронштейна 18' оснащений закріпленою на його кінці 5 93038 гайкою 26, що взаємодіє з натяжним гвинтом 9, а зовнішній елемент 18 телескопічного кронштейна 18' оснащений на своєму кінці обмежником 25. Комп’ютерна верстка Л. Купенко 6 При обертанні натяжного гвинта 9 гайка 26 переміщується, за рахунок чого забезпечується необхідний натяг гусениці, що набігає, 2 роботу 27. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMobile robot
Автори англійськоюCzupryniak Rafal
Назва патенту російськоюМобильный робот
Автори російськоюЧуприняк Рафал
МПК / Мітки
МПК: B60K 26/00, B60K 31/00, B25J 15/02, B62D 55/08
Код посилання
<a href="https://ua.patents.su/3-93038-mobilnijj-robot.html" target="_blank" rel="follow" title="База патентів України">Мобільний робот</a>
Мобільний крокуючий робот
Номер патенту: 87719
Опубліковано: 10.08.2009
Автори: Мащенко Сергій Валеріович, Задніпрянний Олександр Миколайович
МПК: B25J 11/00, B62D 57/00
Мітки: мобільній, крокуючий, робот
Формула / Реферат:
1. Мобільний крокуючий робот, що містить внутрішню і зовнішню рухливі опорні частини, механізми горизонтального і вертикального переміщення опорних частин, кожний з яких складається з приводу, прямолінійної кінематичної пари і напрямних, механізм повороту, який відрізняється тим, що в нього введений механізм балансування, а кожна з опорних частин оснащена тільки одним механізмом переміщення, причому одна з них оснащена тільки механізмом...
Мобільний транспортно-технологічний засіб “bulldog”

Номер патенту: 28282
Опубліковано: 10.12.2007
Автори: Яковенко Анатолій Миколайович, Дорошенко Леонід Васильович, Петров Леонід Миколайович
МПК: B62D 61/00
Мітки: засіб, мобільній, транспортно-технологічний, bulldog
Формула / Реферат:
Мобільний транспортно-технологічний засіб, що включає ведені, вільні та ведучі колеса, двигун і раму, який відрізняється тим, що спереду, ззаду і між веденими та ведучими колесами встановлені навісні пристрої, а між ведучим колесом та колесом вільного обертання встановлені колеса, на осі яких насунуті шківи, через які перекинуто пас, що проходить по роликах, осі яких кронштейном закріплені на рамі, а у поздовжньому напрямку ці ролики...
Мобільний пристрій “rex” для передачі сигналів на мобільний телефон
Номер патенту: 37121
Опубліковано: 25.11.2008
Автор: Фомін Валерій Іванович
МПК: H04B 10/00
Мітки: мобільній, телефон, rex, сигналів, передачі, пристрій
Формула / Реферат:
Мобільний пристрій для передачі сигналів на мобільний телефон, який складається з блока логіки, блока пам'яті, зв'язаного з приймально-передавальним блоком, який відрізняється тим, що до блока логіки підімкнуті вимикач і рознімач датчика стану об'єкта охорони.
Промисловий робот
Номер патенту: 67181
Опубліковано: 15.06.2004
Автори: Осадчий Володимир Степанович, Бергер Євгеній Емильович, Бергер Еміль Григорович
МПК: B25J 11/00
Мітки: робот, промисловий
Формула / Реферат:
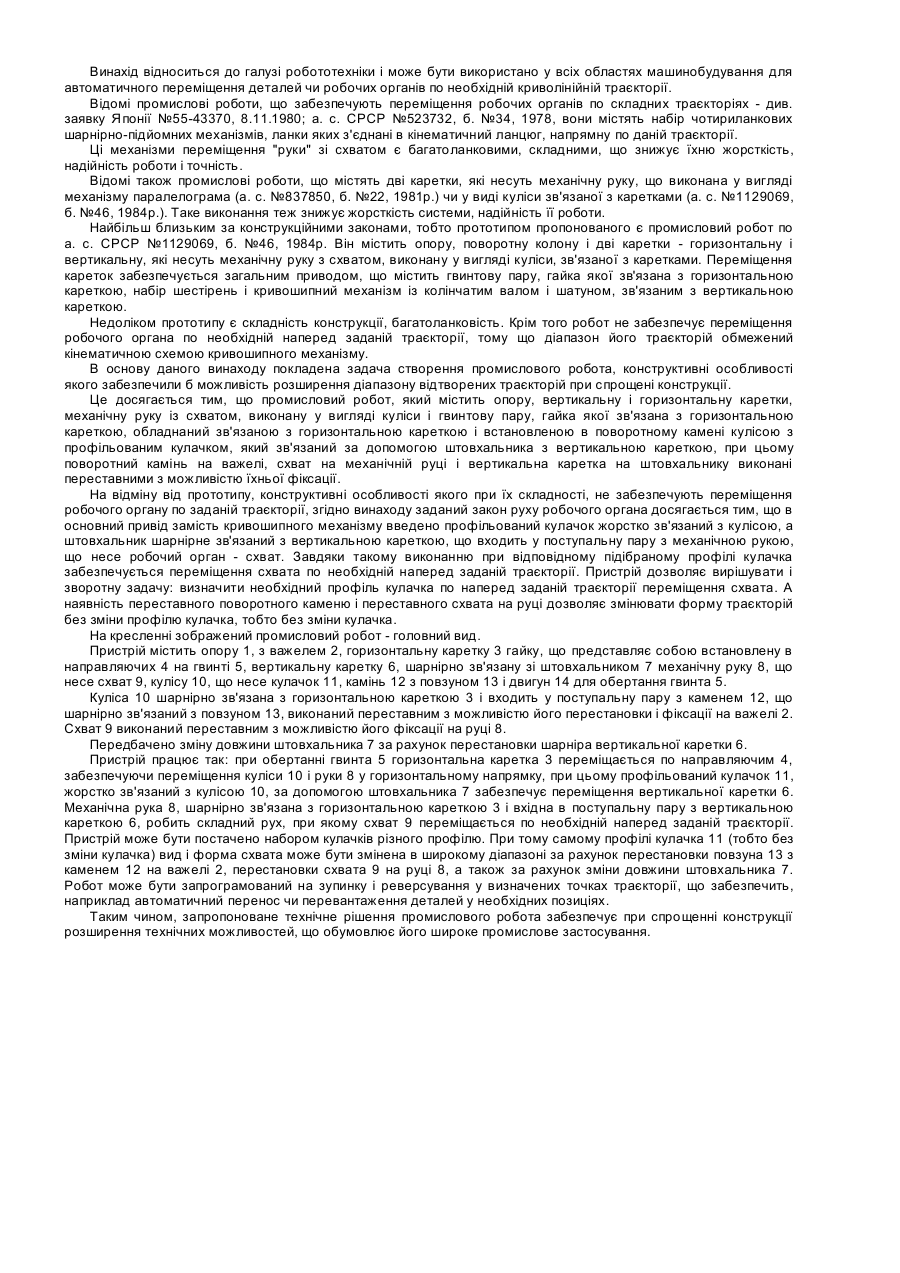
Промисловий робот, що містить опору, вертикальну і горизонтальну каретки, механічну руку із схватом, виконану у вигляді куліси, і гвинтову пару, гайка якої зв'язана з горизонтальною кареткою, який відрізняється тим, що він обладнаний зв'язаною з горизонтальною кареткою і встановленою в поворотному камені кулісою з профільованим кулачком, який зв'язаний за допомогою штовхача з вертикальною кареткою, при цьому поворотний камінь на важелі, схват...
Підводний робот
Номер патенту: 26282
Опубліковано: 10.09.2007
Автори: Данильченко Ігор Євгенович, Данильченко Наталя В'ячеславівна, Пишнєв Сергій Миколайович, Родічева Надія Іванівна
МПК: B63G 8/00
Формула / Реферат:
Підводний робот, що має міцні корпуси, корпус з відеокамерою, рушійні пристрої, корпус з технологічним обладнанням, який відрізняється тим, що окремі конструктивні елементи виконані у вигляді функціональних модулів і з'єднані між собою за допомогою з'єднувального модуля з універсальним вузлом кріплення.
Попередній патент: Транспортна система з підвісною дорогою для транспортування предметів і спосіб її експлуатації
Наступний патент: Оптимізація передачі даних у низхідному каналі для передачі даних з пакетною комутацією
Випадковий патент: Спосіб визначення домішки 4-амінобутанової кислоти у готовій лікарській формі "алендронат натрію, таблетки"