Мобільний крокуючий робот
Номер патенту: 87719
Опубліковано: 10.08.2009
Автори: Задніпрянний Олександр Миколайович, Мащенко Сергій Валеріович
Формула / Реферат
1. Мобільний крокуючий робот, що містить внутрішню і зовнішню рухливі опорні частини, механізми горизонтального і вертикального переміщення опорних частин, кожний з яких складається з приводу, прямолінійної кінематичної пари і напрямних, механізм повороту, який відрізняється тим, що в нього введений механізм балансування, а кожна з опорних частин оснащена тільки одним механізмом переміщення, причому одна з них оснащена тільки механізмом горизонтального переміщення, а інша - тільки механізмом вертикального переміщення.
2. Робот за п. 1, який відрізняється тим, що механізм балансування містить привід, прямолінійну кінематичну пару, напрямні і балансувальний вантаж.
Текст
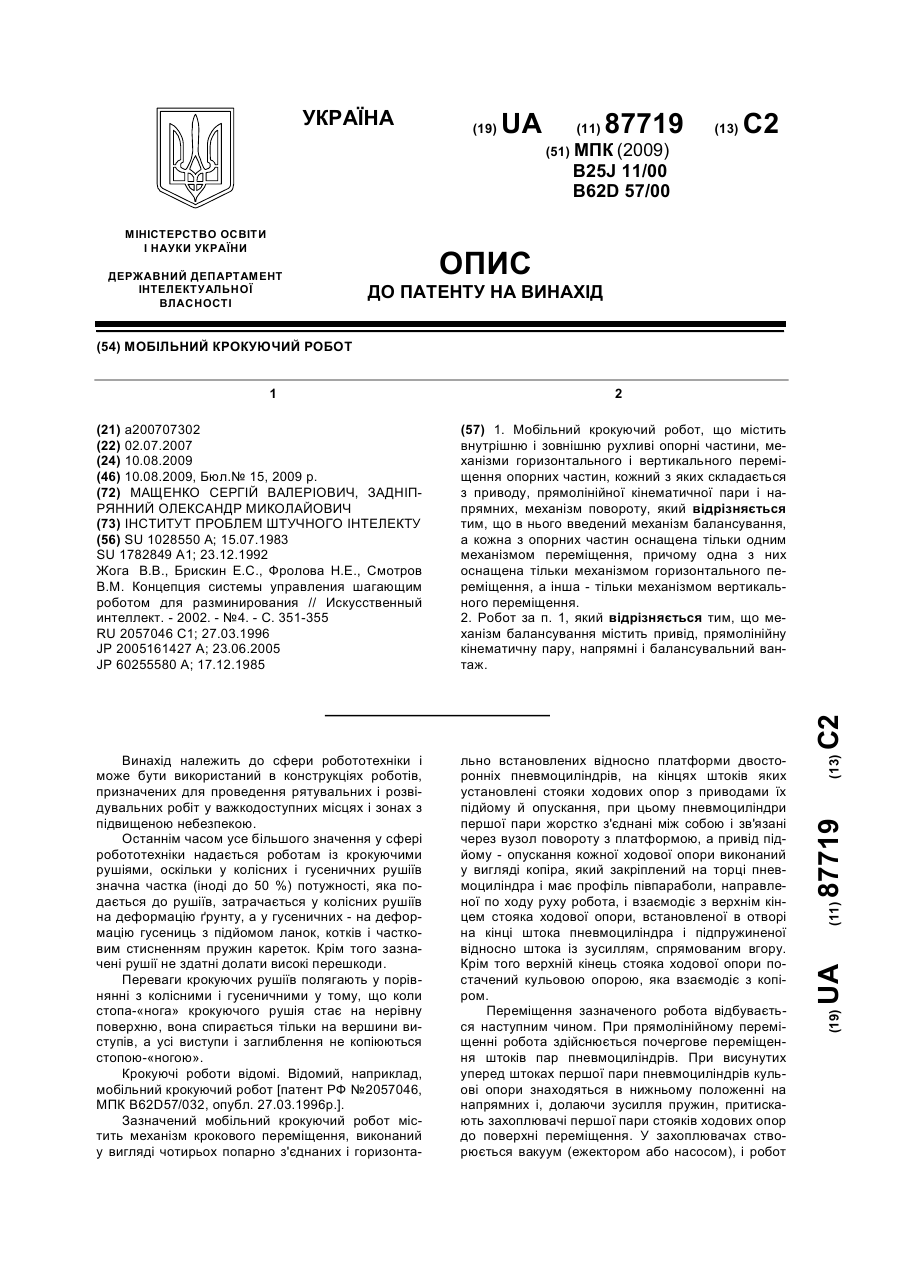
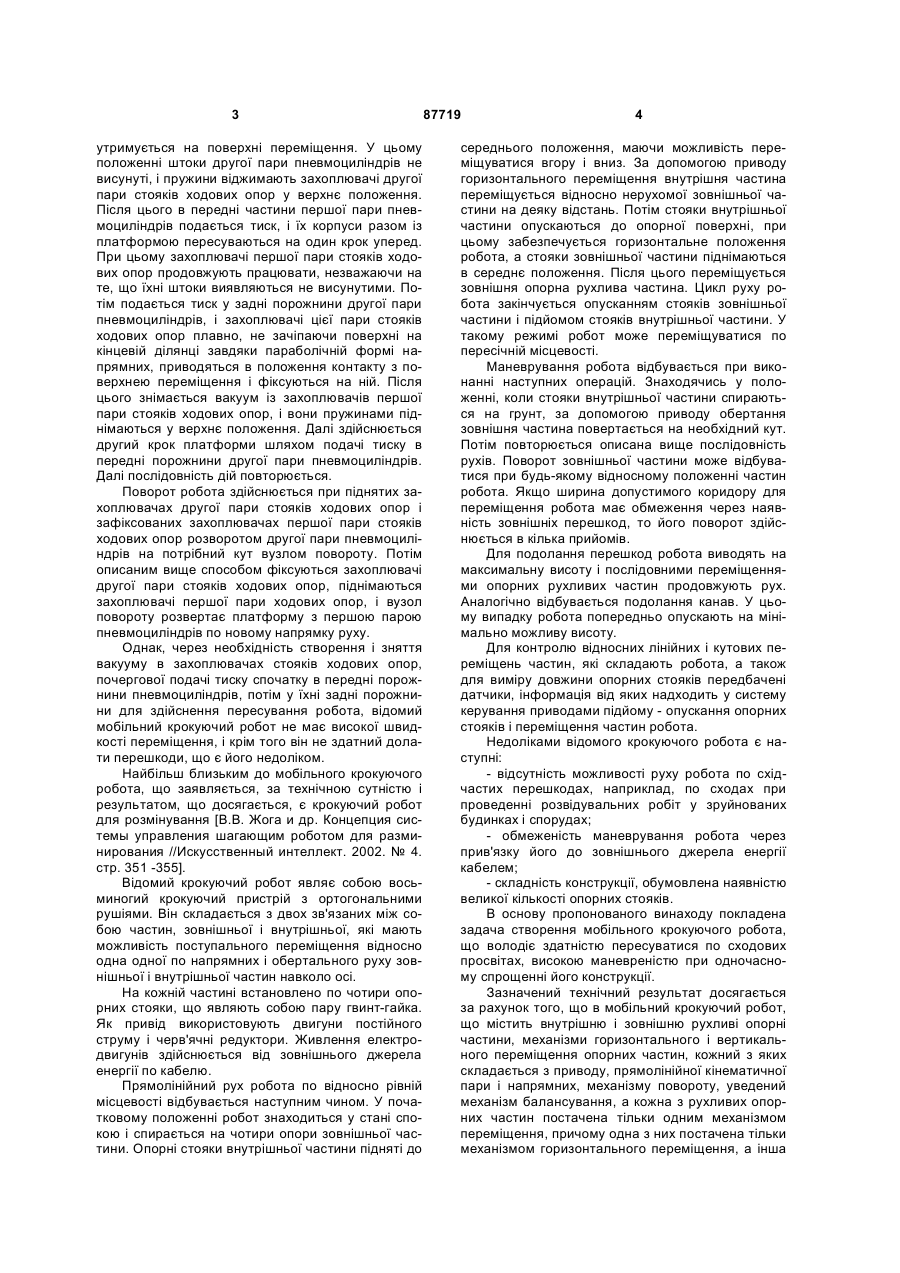
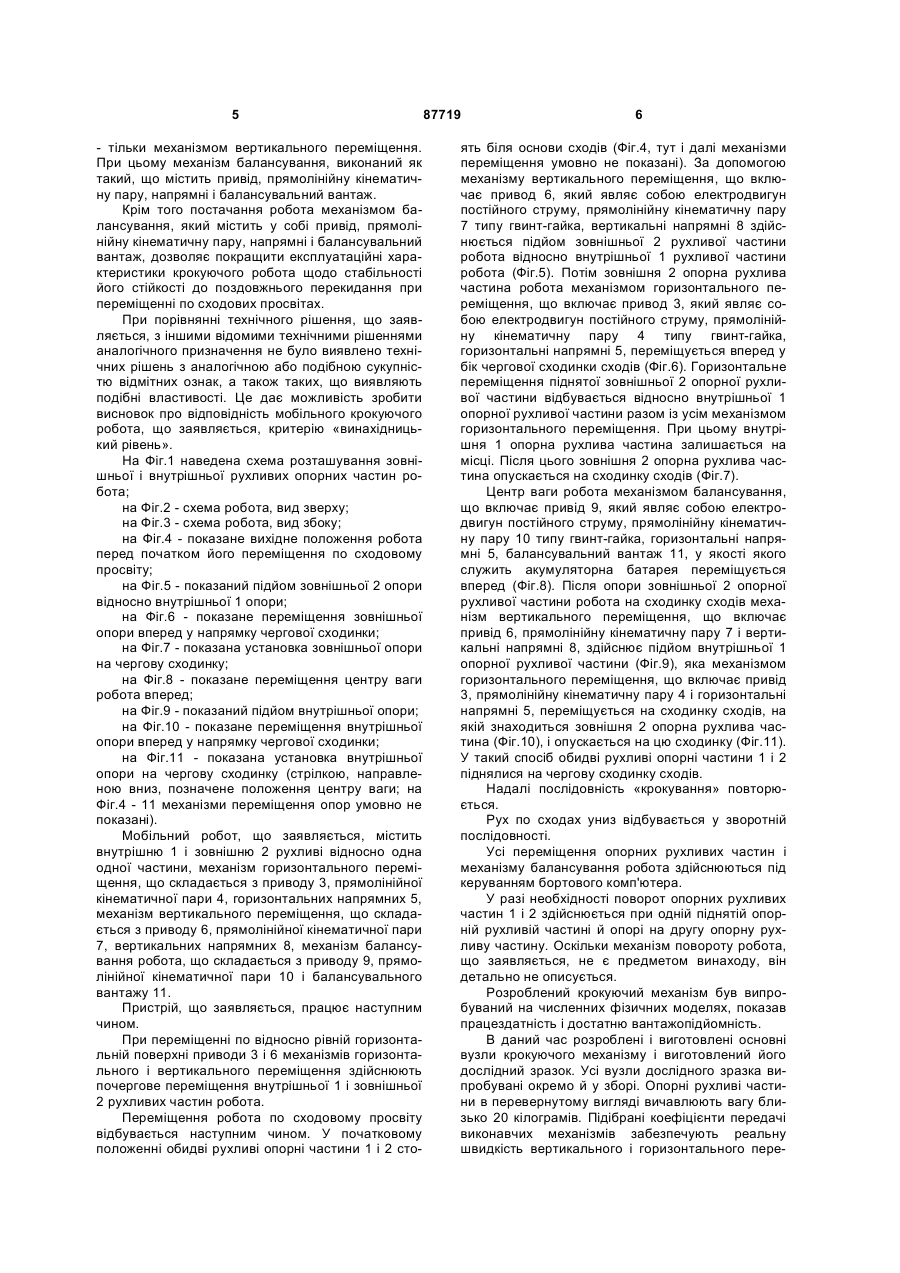
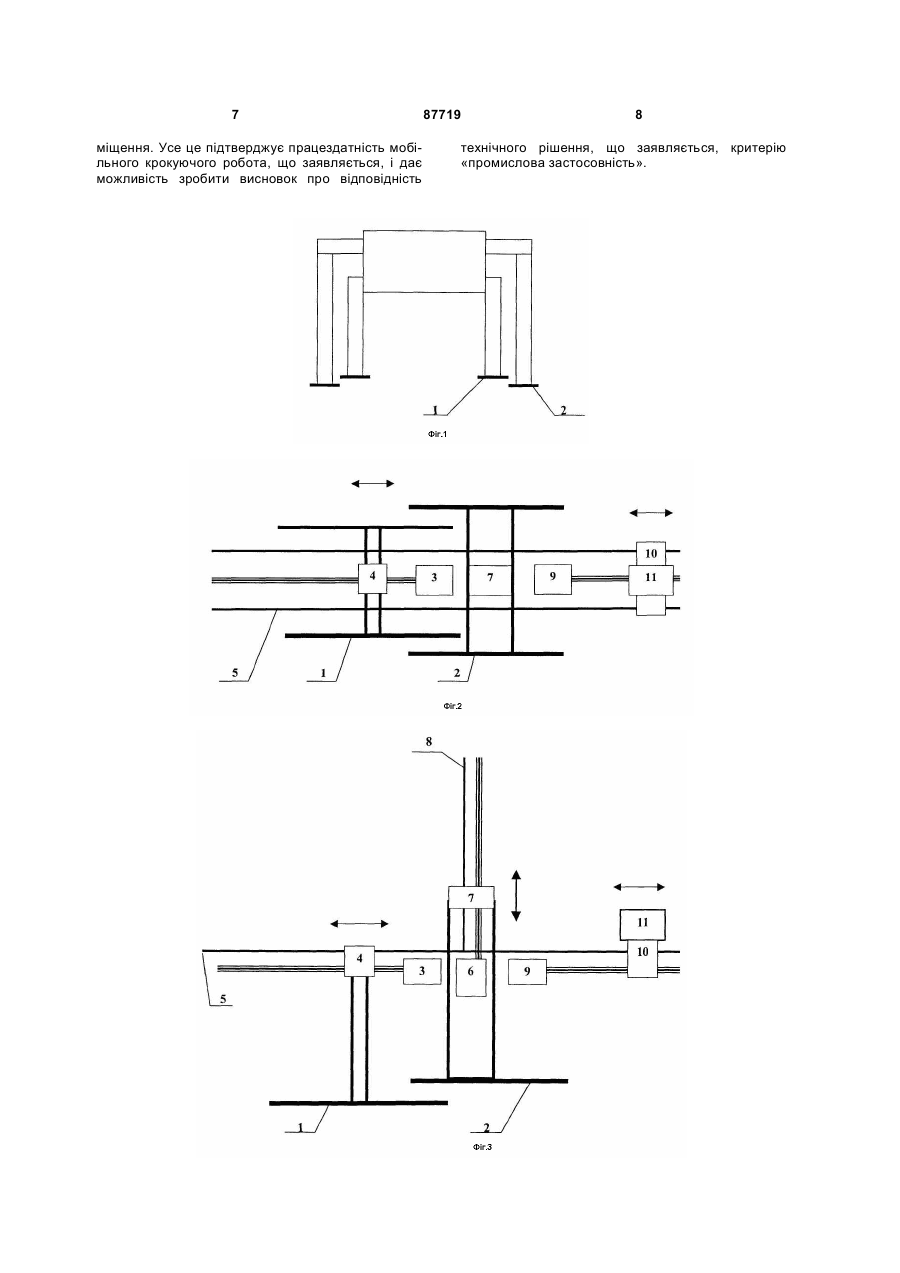
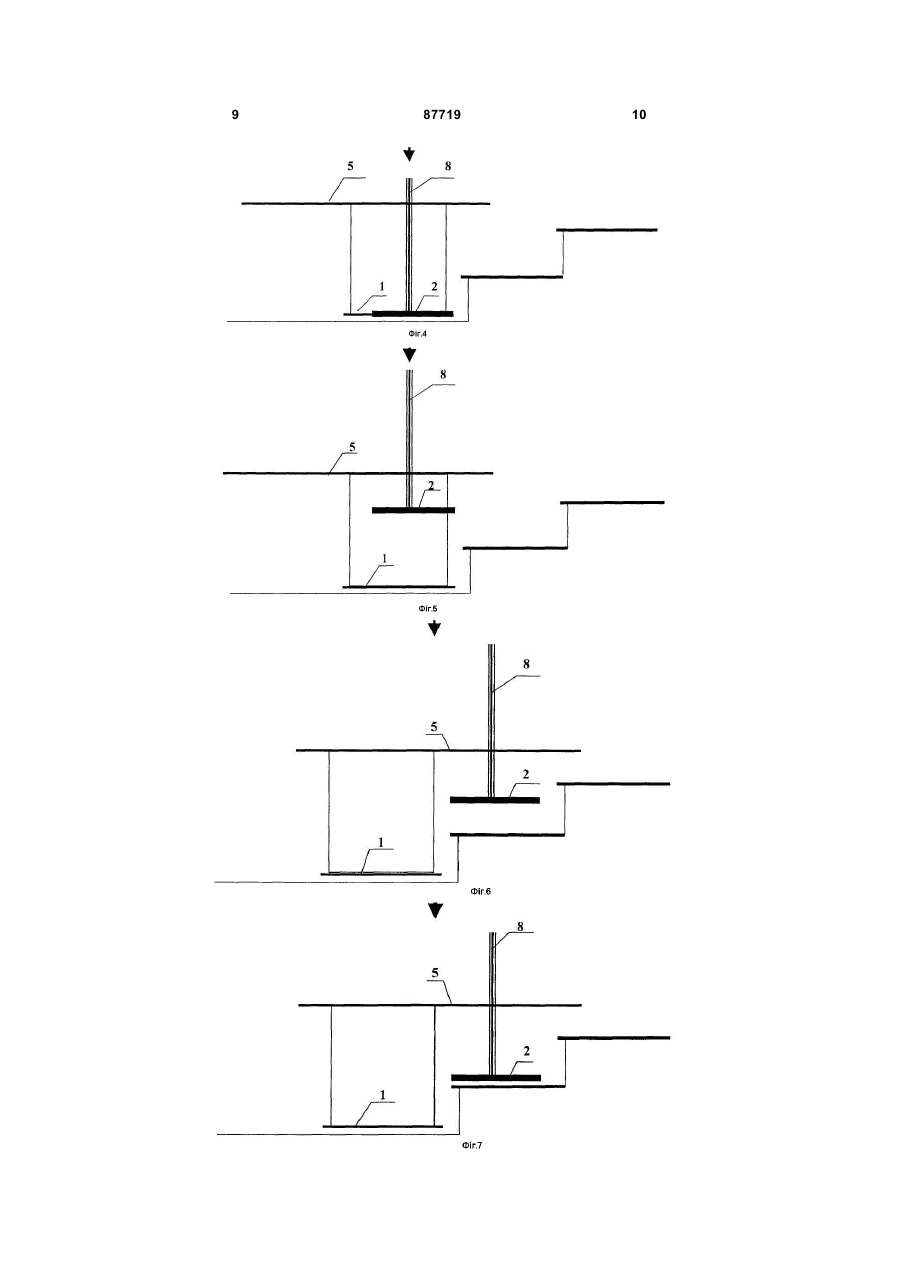
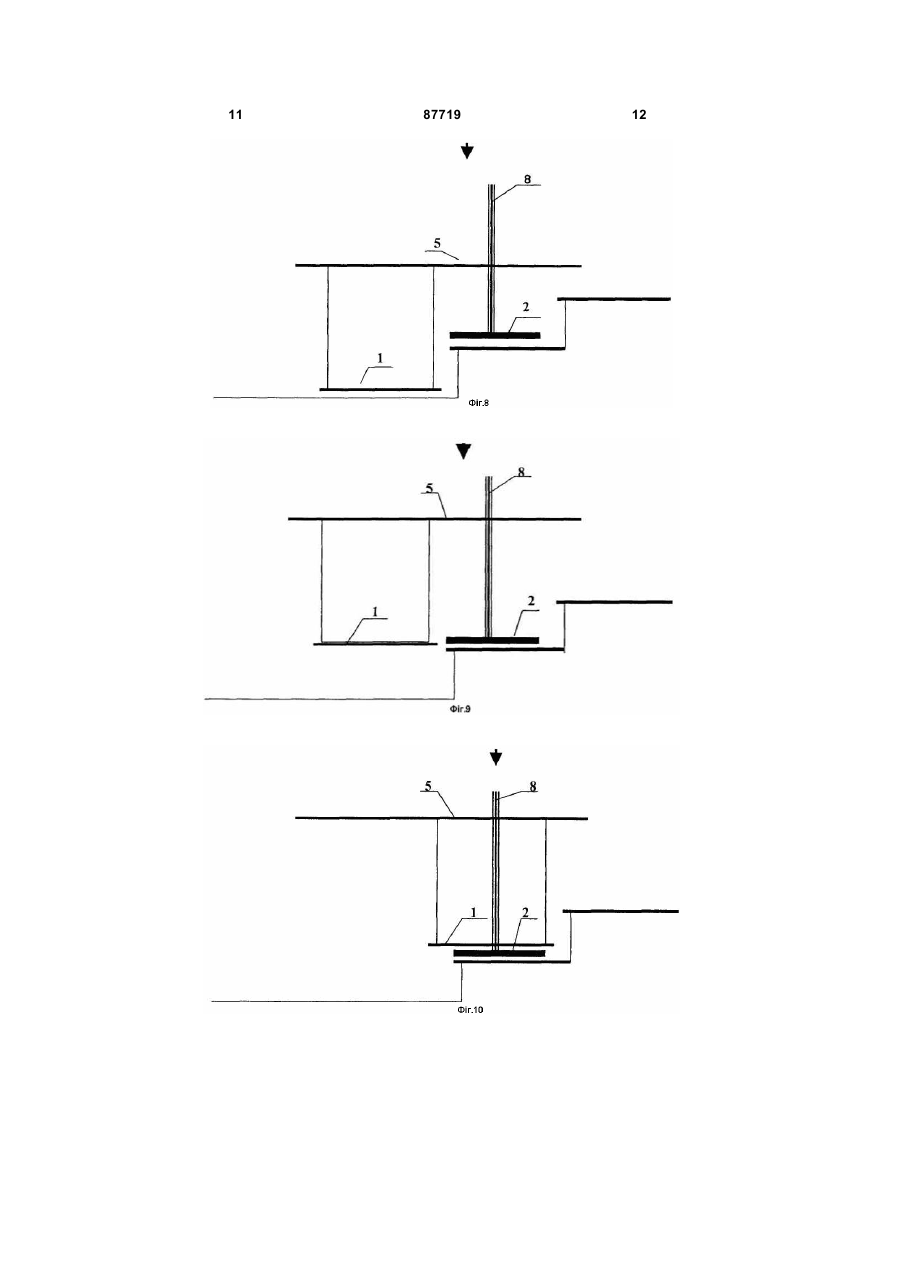
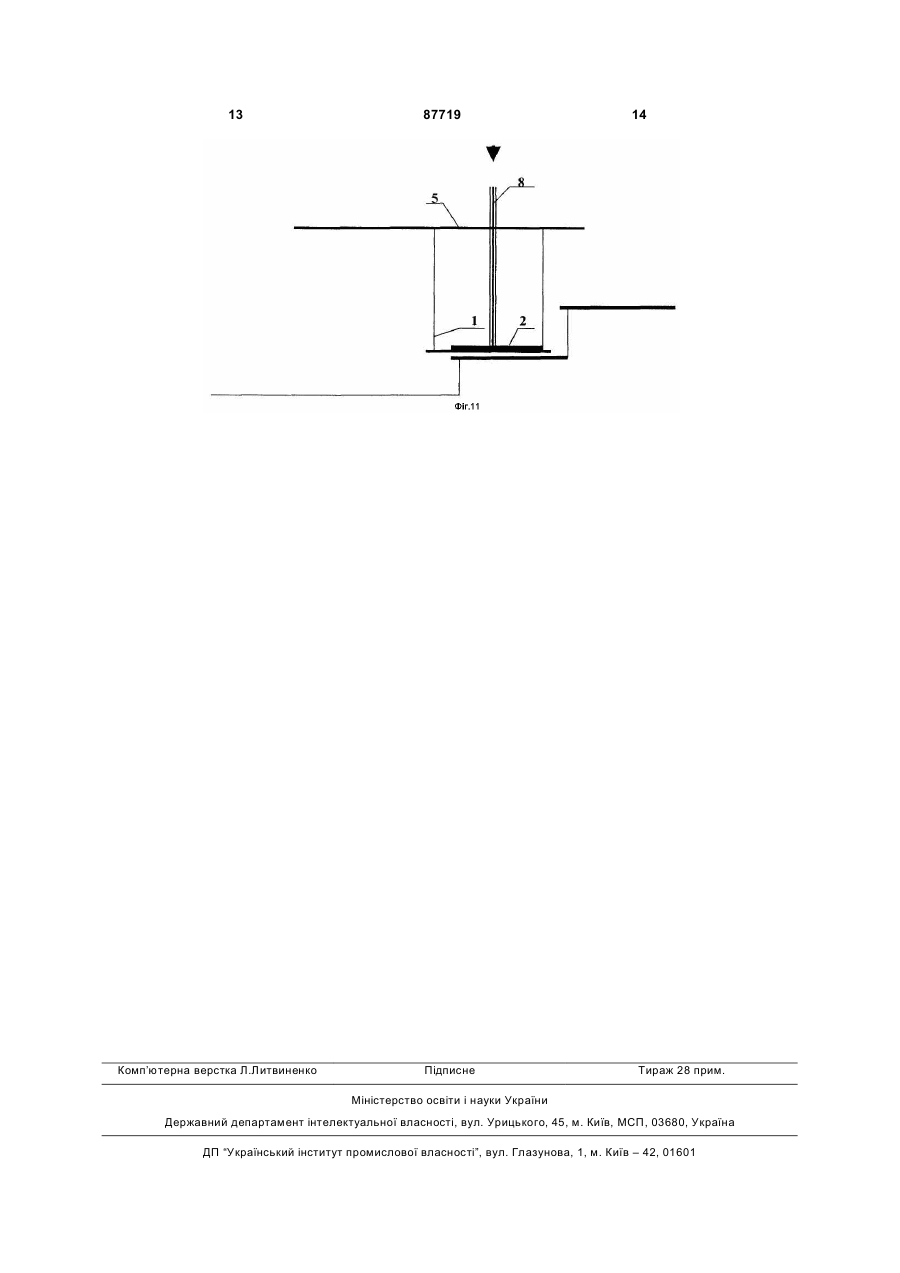
1. Мобільний крокуючий робот, що містить внутрішню і зовнішню рухливі опорні частини, механізми горизонтального і вертикального переміщення опорних частин, кожний з яких складається з приводу, прямолінійної кінематичної пари і напрямних, механізм повороту, який відрізняється тим, що в нього введений механізм балансування, а кожна з опорних частин оснащена тільки одним механізмом переміщення, причому одна з них оснащена тільки механізмом горизонтального переміщення, а інша - тільки механізмом вертикального переміщення. 2. Робот за п. 1, який відрізняється тим, що механізм балансування містить привід, прямолінійну кінематичну пару, напрямні і балансувальний вантаж. Винахід належить до сфери робототехніки і може бути використаний в конструкціях роботів, призначених для проведення рятувальних і розвідувальних робіт у важкодоступних місцях і зонах з підвищеною небезпекою. Останнім часом усе більшого значення у сфері робототехніки надається роботам із крокуючими рушіями, оскільки у колісних і гусеничних рушіїв значна частка (іноді до 50 %) потужності, яка подається до рушіїв, затрачається у колісних рушіїв на деформацію ґрунту, а у гусеничних - на деформацію гусениць з підйомом ланок, котків і частковим стисненням пружин кареток. Крім того зазначені рушії не здатні долати високі перешкоди. Переваги крокуючих рушіїв полягають у порівнянні з колісними і гусеничними у тому, що коли стопа-«нога» крокуючого рушія стає на нерівну поверхню, вона спирається тільки на вершини виступів, а усі виступи і заглиблення не копіюються стопою-«ногою». Крокуючі роботи відомі. Відомий, наприклад, мобільний крокуючий робот [патент РФ №2057046, МПК B62D57/032, опубл. 27.03.1996p.]. Зазначений мобільний крокуючий робот містить механізм крокового переміщення, виконаний у вигляді чотирьох попарно з'єднаних і горизонта льно встановлених відносно платформи двосторонніх пневмоциліндрів, на кінцях штоків яких установлені стояки ходових опор з приводами їх підйому й опускання, при цьому пневмоциліндри першої пари жорстко з'єднані між собою і зв'язані через вузол повороту з платформою, а привід підйому - опускання кожної ходової опори виконаний у вигляді копіра, який закріплений на торці пневмоциліндра і має профіль півпараболи, направленої по ходу руху робота, і взаємодіє з верхнім кінцем стояка ходової опори, встановленої в отворі на кінці штока пневмоциліндра і підпружиненої відносно штока із зусиллям, спрямованим вгору. Крім того верхній кінець стояка ходової опори постачений кульовою опорою, яка взаємодіє з копіром. Переміщення зазначеного робота відбувається наступним чином. При прямолінійному переміщенні робота здійснюється почергове переміщення штоків пар пневмоциліндрів. При висунутих уперед штоках першої пари пневмоциліндрів кульові опори знаходяться в нижньому положенні на напрямних і, долаючи зусилля пружин, притискають захоплювачі першої пари стояків ходових опор до поверхні переміщення. У захоплювачах створюється вакуум (ежектором або насосом), і робот (19) UA (11) 87719 (13) C2 (21) a200707302 (22) 02.07.2007 (24) 10.08.2009 (46) 10.08.2009, Бюл.№ 15, 2009 р. (72) МАЩЕНКО СЕРГІЙ ВАЛЕРІОВИЧ, ЗАДНІПРЯННИЙ ОЛЕКСАНДР МИКОЛАЙОВИЧ (73) ІНСТИТУТ ПРОБЛЕМ ШТУЧНОГО ІНТЕЛЕКТУ (56) SU 1028550 A; 15.07.1983 SU 1782849 A1; 23.12.1992 Жога В.В., Брискин Е.С., Фролова Н.Е., Смотров В.М. Концепция системы управления шагающим роботом для разминирования // Искусственный интеллект. - 2002. - №4. - С. 351-355 RU 2057046 C1; 27.03.1996 JP 2005161427 A; 23.06.2005 JP 60255580 A; 17.12.1985 3 утримується на поверхні переміщення. У цьому положенні штоки другої пари пневмоциліндрів не висунуті, і пружини віджимають захоплювачі другої пари стояків ходових опор у верхнє положення. Після цього в передні частини першої пари пневмоциліндрів подається тиск, і їх корпуси разом із платформою пересуваються на один крок уперед. При цьому захоплювачі першої пари стояків ходових опор продовжують працювати, незважаючи на те, що їхні штоки виявляються не висунутими. Потім подається тиск у задні порожнини другої пари пневмоциліндрів, і захоплювачі цієї пари стояків ходових опор плавно, не зачіпаючи поверхні на кінцевій ділянці завдяки параболічній формі напрямних, приводяться в положення контакту з поверхнею переміщення і фіксуються на ній. Після цього знімається вакуум із захоплювачів першої пари стояків ходових опор, і вони пружинами піднімаються у верхнє положення. Далі здійснюється другий крок платформи шляхом подачі тиску в передні порожнини другої пари пневмоциліндрів. Далі послідовність дій повторюється. Поворот робота здійснюється при піднятих захоплювачах другої пари стояків ходових опор і зафіксованих захоплювачах першої пари стояків ходових опор розворотом другої пари пневмоциліндрів на потрібний кут вузлом повороту. Потім описаним вище способом фіксуються захоплювачі другої пари стояків ходових опор, піднімаються захоплювачі першої пари ходових опор, і вузол повороту розвертає платформу з першою парою пневмоциліндрів по новому напрямку руху. Однак, через необхідність створення і зняття вакууму в захоплювачах стояків ходових опор, почергової подачі тиску спочатку в передні порожнини пневмоциліндрів, потім у їхні задні порожнини для здійснення пересування робота, відомий мобільний крокуючий робот не має високої швидкості переміщення, і крім того він не здатний долати перешкоди, що є його недоліком. Найбільш близьким до мобільного крокуючого робота, що заявляється, за технічною сутністю і результатом, що досягається, є крокуючий робот для розмінування [В.В. Жога и др. Концепция системы управления шагающим роботом для разминирования //Искусственный интеллект. 2002. № 4. стр. 351 -355]. Відомий крокуючий робот являє собою восьминогий крокуючий пристрій з ортогональними рушіями. Він складається з двох зв'язаних між собою частин, зовнішньої і внутрішньої, які мають можливість поступального переміщення відносно одна одної по напрямних і обертального руху зовнішньої і внутрішньої частин навколо осі. На кожній частині встановлено по чотири опорних стояки, що являють собою пару гвинт-гайка. Як привід використовують двигуни постійного струму і черв'ячні редуктори. Живлення електродвигунів здійснюється від зовнішнього джерела енергії по кабелю. Прямолінійний рух робота по відносно рівній місцевості відбувається наступним чином. У початковому положенні робот знаходиться у стані спокою і спирається на чотири опори зовнішньої частини. Опорні стояки внутрішньої частини підняті до 87719 4 середнього положення, маючи можливість переміщуватися вгору і вниз. За допомогою приводу горизонтального переміщення внутрішня частина переміщується відносно нерухомої зовнішньої частини на деяку відстань. Потім стояки внутрішньої частини опускаються до опорної поверхні, при цьому забезпечується горизонтальне положення робота, а стояки зовнішньої частини піднімаються в середнє положення. Після цього переміщується зовнішня опорна рухлива частина. Цикл руху робота закінчується опусканням стояків зовнішньої частини і підйомом стояків внутрішньої частини. У такому режимі робот може переміщуватися по пересічній місцевості. Маневрування робота відбувається при виконанні наступних операцій. Знаходячись у положенні, коли стояки внутрішньої частини спираються на грунт, за допомогою приводу обертання зовнішня частина повертається на необхідний кут. Потім повторюється описана вище послідовність рухів. Поворот зовнішньої частини може відбуватися при будь-якому відносному положенні частин робота. Якщо ширина допустимого коридору для переміщення робота має обмеження через наявність зовнішніх перешкод, то його поворот здійснюється в кілька прийомів. Для подолання перешкод робота виводять на максимальну висоту і послідовними переміщеннями опорних рухливих частин продовжують рух. Аналогічно відбувається подолання канав. У цьому випадку робота попередньо опускають на мінімально можливу висоту. Для контролю відносних лінійних і кутових переміщень частин, які складають робота, а також для виміру довжини опорних стояків передбачені датчики, інформація від яких надходить у систему керування приводами підйому - опускання опорних стояків і переміщення частин робота. Недоліками відомого крокуючого робота є наступні: - відсутність можливості руху робота по східчастих перешкодах, наприклад, по сходах при проведенні розвідувальних робіт у зруйнованих будинках і спорудах; - обмеженість маневрування робота через прив'язку його до зовнішнього джерела енергії кабелем; - складність конструкції, обумовлена наявністю великої кількості опорних стояків. В основу пропонованого винаходу покладена задача створення мобільного крокуючого робота, що володіє здатністю пересуватися по сходових просвітах, високою маневреністю при одночасному спрощенні його конструкції. Зазначений технічний результат досягається за рахунок того, що в мобільний крокуючий робот, що містить внутрішню і зовнішню рухливі опорні частини, механізми горизонтального і вертикального переміщення опорних частин, кожний з яких складається з приводу, прямолінійної кінематичноїпари і напрямних, механізму повороту, уведений механізм балансування, а кожна з рухливих опорних частин постачена тільки одним механізмом переміщення, причому одна з них постачена тільки механізмом горизонтального переміщення, а інша 5 - тільки механізмом вертикального переміщення. При цьому механізм балансування, виконаний як такий, що містить привід, прямолінійну кінематичну пару, напрямні і балансувальний вантаж. Крім того постачання робота механізмом балансування, який містить у собі привід, прямолінійну кінематичну пару, напрямні і балансувальний вантаж, дозволяє покращити експлуатаційні характеристики крокуючого робота щодо стабільності його стійкості до поздовжнього перекидання при переміщенні по сходових просвітах. При порівнянні технічного рішення, що заявляється, з іншими відомими технічними рішеннями аналогічного призначення не було виявлено технічних рішень з аналогічною або подібною сукупністю відмітних ознак, а також таких, що виявляють подібні властивості. Це дає можливість зробити висновок про відповідність мобільного крокуючого робота, що заявляється, критерію «винахідницький рівень». На Фіг.1 наведена схема розташування зовнішньої і внутрішньої рухливих опорних частин робота; на Фіг.2 - схема робота, вид зверху; на Фіг.3 - схема робота, вид збоку; на Фіг.4 - показане вихідне положення робота перед початком його переміщення по сходовому просвіту; на Фіг.5 - показаний підйом зовнішньої 2 опори відносно внутрішньої 1 опори; на Фіг.6 - показане переміщення зовнішньої опори вперед у напрямку чергової сходинки; на Фіг.7 - показана установка зовнішньої опори на чергову сходинку; на Фіг.8 - показане переміщення центру ваги робота вперед; на Фіг.9 - показаний підйом внутрішньої опори; на Фіг.10 - показане переміщення внутрішньої опори вперед у напрямку чергової сходинки; на Фіг.11 - показана установка внутрішньої опори на чергову сходинку (стрілкою, направленою вниз, позначене положення центру ваги; на Фіг.4 - 11 механізми переміщення опор умовно не показані). Мобільний робот, що заявляється, містить внутрішню 1 і зовнішню 2 рухливі відносно одна одної частини, механізм горизонтального переміщення, що складається з приводу 3, прямолінійної кінематичної пари 4, горизонтальних напрямних 5, механізм вертикального переміщення, що складається з приводу 6, прямолінійної кінематичної пари 7, вертикальних напрямних 8, механізм балансування робота, що складається з приводу 9, прямолінійної кінематичної пари 10 і балансувального вантажу 11. Пристрій, що заявляється, працює наступним чином. При переміщенні по відносно рівній горизонтальній поверхні приводи 3 і 6 механізмів горизонтального і вертикального переміщення здійснюють почергове переміщення внутрішньої 1 і зовнішньої 2 рухливих частин робота. Переміщення робота по сходовому просвіту відбувається наступним чином. У початковому положенні обидві рухливі опорні частини 1 і 2 сто 87719 6 ять біля основи сходів (Фіг.4, тут і далі механізми переміщення умовно не показані). За допомогою механізму вертикального переміщення, що включає привод 6, який являє собою електродвигун постійного струму, прямолінійну кінематичну пару 7 типу гвинт-гайка, вертикальні напрямні 8 здійснюється підйом зовнішньої 2 рухливої частини робота відносно внутрішньої 1 рухливої частини робота (Фіг.5). Потім зовнішня 2 опорна рухлива частина робота механізмом горизонтального переміщення, що включає привод 3, який являє собою електродвигун постійного струму, прямолінійну кінематичну пару 4 типу гвинт-гайка, горизонтальні напрямні 5, переміщується вперед у бік чергової сходинки сходів (Фіг.6). Горизонтальне переміщення піднятої зовнішньої 2 опорної рухливої частини відбувається відносно внутрішньої 1 опорної рухливої частини разом із усім механізмом горизонтального переміщення. При цьому внутрішня 1 опорна рухлива частина залишається на місці. Після цього зовнішня 2 опорна рухлива частина опускається на сходинку сходів (Фіг.7). Центр ваги робота механізмом балансування, що включає привід 9, який являє собою електродвигун постійного струму, прямолінійну кінематичну пару 10 типу гвинт-гайка, горизонтальні напрямні 5, балансувальний вантаж 11, у якості якого служить акумуляторна батарея переміщується вперед (Фіг.8). Після опори зовнішньої 2 опорної рухливої частини робота на сходинку сходів механізм вертикального переміщення, що включає привід 6, прямолінійну кінематичну пару 7 і вертикальні напрямні 8, здійснює підйом внутрішньої 1 опорної рухливої частини (Фіг.9), яка механізмом горизонтального переміщення, що включає привід 3, прямолінійну кінематичну пару 4 і горизонтальні напрямні 5, переміщується на сходинку сходів, на якій знаходиться зовнішня 2 опорна рухлива частина (Фіг.10), і опускається на цю сходинку (Фіг.11). У такий спосіб обидві рухливі опорні частини 1 і 2 піднялися на чергову сходинку сходів. Надалі послідовність «крокування» повторюється. Рух по сходах униз відбувається у зворотній послідовності. Усі переміщення опорних рухливих частин і механізму балансування робота здійснюються під керуванням бортового комп'ютера. У разі необхідності поворот опорних рухливих частин 1 і 2 здійснюється при одній піднятій опорній рухливій частині й опорі на другу опорну рухливу частину. Оскільки механізм повороту робота, що заявляється, не є предметом винаходу, він детально не описується. Розроблений крокуючий механізм був випробуваний на численних фізичних моделях, показав працездатність і достатню вантажопідйомність. В даний час розроблені і виготовлені основні вузли крокуючого механізму і виготовлений його дослідний зразок. Усі вузли дослідного зразка випробувані окремо й у зборі. Опорні рухливі частини в перевернутому вигляді вичавлюють вагу близько 20 кілограмів. Підібрані коефіцієнти передачі виконавчих механізмів забезпечують реальну швидкість вертикального і горизонтального пере 7 міщення. Усе це підтверджує працездатність мобільного крокуючого робота, що заявляється, і дає можливість зробити висновок про відповідність 87719 8 технічного рішення, що заявляється, критерію «промислова застосовність». 9 87719 10 11 87719 12 13 Комп’ютерна верстка Л.Литвиненко 87719 Підписне 14 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMobile walking robot
Автори англійськоюZadnipriannyi Oleksandr Mykolaiovych
Назва патенту російськоюМобильный шагающий робот
Автори російськоюЗаднипрянный Александр Николаевич
МПК / Мітки
МПК: B62D 57/00, B25J 11/00
Мітки: крокуючий, робот, мобільній
Код посилання
<a href="https://ua.patents.su/7-87719-mobilnijj-krokuyuchijj-robot.html" target="_blank" rel="follow" title="База патентів України">Мобільний крокуючий робот</a>
Крокуючий всюдихід
Номер патенту: 52663
Опубліковано: 15.01.2003
Автори: Верхман Олександр Аркадійович, Верхман Ілля Олександрович, Огородник Станіслав Станіславович
МПК: B62D 57/00, B65G 25/00
Формула / Реферат:
1. Крокуючий всюдихід, який має корпус-балку, вантажну кабіну, дві або більше число пересувних ніг-опор, кожна з яких має три або більше число опорних лап, які спираються на дорогу, механізм, здатний пересувати ноги-опори вздовж корпуса-балки, механізм в кожній нозі-опорі, здатний повертати ногу-опору навколо своєї осі і змінювати кут між корпусом-балкою і ногою-опорою, а також силовий механізм в кожній нозі-опорі, здатний зводити і розводити...
Промисловий робот
Номер патенту: 67181
Опубліковано: 15.06.2004
Автори: Бергер Євгеній Емильович, Осадчий Володимир Степанович, Бергер Еміль Григорович
МПК: B25J 11/00
Мітки: промисловий, робот
Формула / Реферат:
Промисловий робот, що містить опору, вертикальну і горизонтальну каретки, механічну руку із схватом, виконану у вигляді куліси, і гвинтову пару, гайка якої зв'язана з горизонтальною кареткою, який відрізняється тим, що він обладнаний зв'язаною з горизонтальною кареткою і встановленою в поворотному камені кулісою з профільованим кулачком, який зв'язаний за допомогою штовхача з вертикальною кареткою, при цьому поворотний камінь на важелі, схват...
Крокуючий рушій малогабаритного робота

Номер патенту: 75991
Опубліковано: 15.06.2006
Автори: Шевченко Анатолій Іванович, Полівцев Сергій Олександрович
МПК: B62D 57/00, B25J 11/00
Мітки: рушій, крокуючий, робота, малогабаритного
Формула / Реферат:
1. Крокуючий рушій малогабаритного робота, що містить корпус, у якому розташовані рівнобіжні привідні осі, крокуючі стопи, що розташовані на протилежних боках корпуса, який відрізняється тим, що у нього введені перший електродвигун, на валу якого розташований перший редуктор, на виході якого установлена ведуча шестірня, сполучена з веденими шестернями, жорстко з'єднаними з привідними рівнобіжними осями, на кінцях яких розташовані кривошипи,...
Підводний робот
Номер патенту: 26282
Опубліковано: 10.09.2007
Автори: Данильченко Наталя В'ячеславівна, Родічева Надія Іванівна, Пишнєв Сергій Миколайович, Данильченко Ігор Євгенович
МПК: B63G 8/00
Формула / Реферат:
Підводний робот, що має міцні корпуси, корпус з відеокамерою, рушійні пристрої, корпус з технологічним обладнанням, який відрізняється тим, що окремі конструктивні елементи виконані у вигляді функціональних модулів і з'єднані між собою за допомогою з'єднувального модуля з універсальним вузлом кріплення.
Крокуючий конвейєр
Номер патенту: 9573
Опубліковано: 17.10.2005
Автори: Котелевець Юрій Сергійович, Петрусенко Алла Олександрівна, Россомаха Валерій Володимирович, Єрьоменко Олег Анатолійович
МПК: B65G 25/04
Формула / Реферат:
Крокуючий конвеєр, що містить нерухому раму, рухому несучу раму, циліндри підйому та переміщення рухомої несучої рами і механізм підйому з опорними та фіксуючими роликами, який відрізняється тим, що механізм підйому рухомої рами має одноплечі важелі, взаємозв'язані між собою тягами і шарнірно закріплені нижньою частиною на фундаменті, а верхньою частиною за допомогою опорних і фіксуючих роликів має можливість взаємодії з рухомою несучою рамою...
Попередній патент: Пристрій для виготовлення стоматологічних лікувальних дисків
Наступний патент: Спосіб виробництва фітосиропів
Випадковий патент: Спосіб ультразвукової візуалізації структур біологічної тканини та пристрій для його здійснення