Спосіб переміщення нижньої точки шліфувального круга з дугоподібною шліфуючою поверхнею по розрахунковій траєкторії
Формула / Реферат
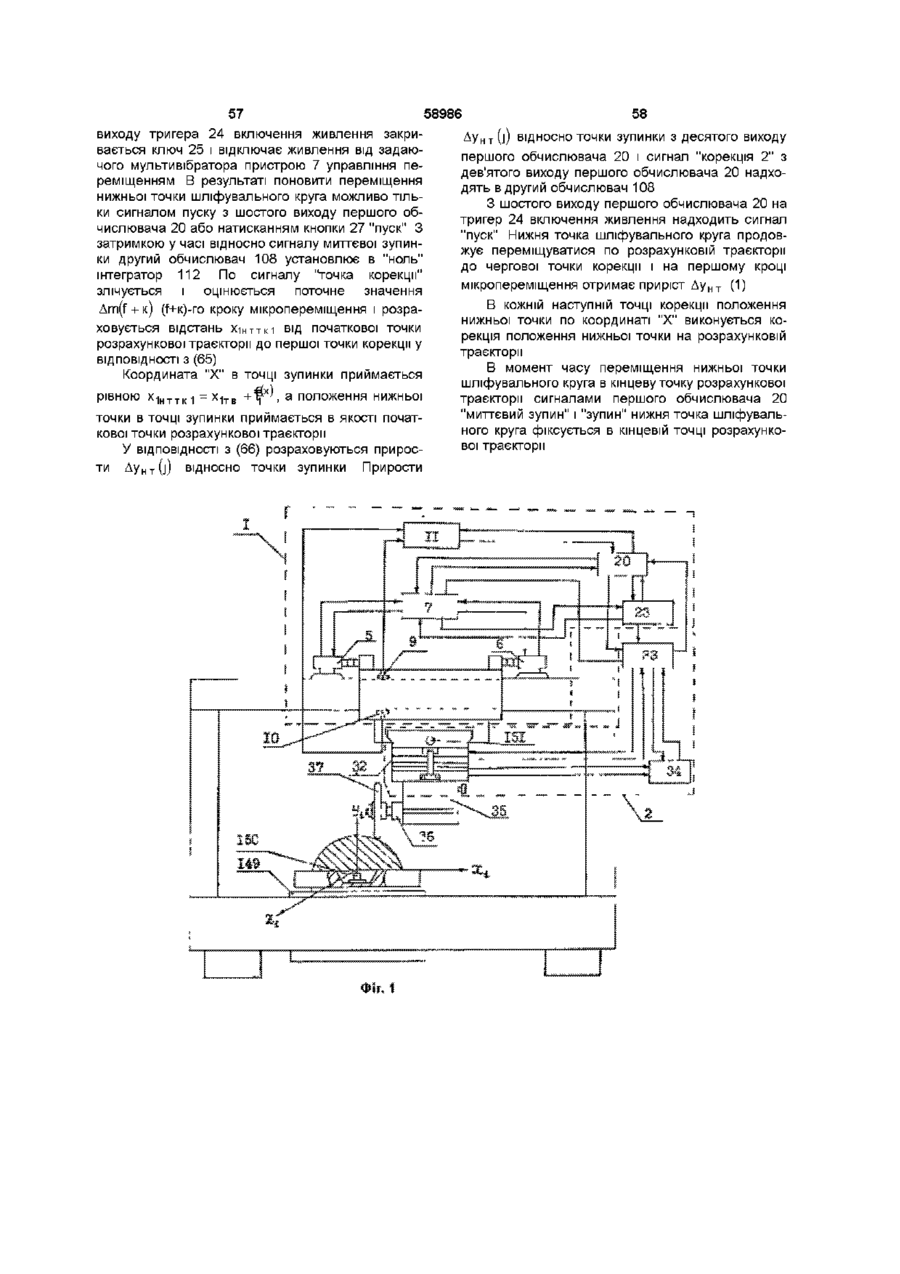
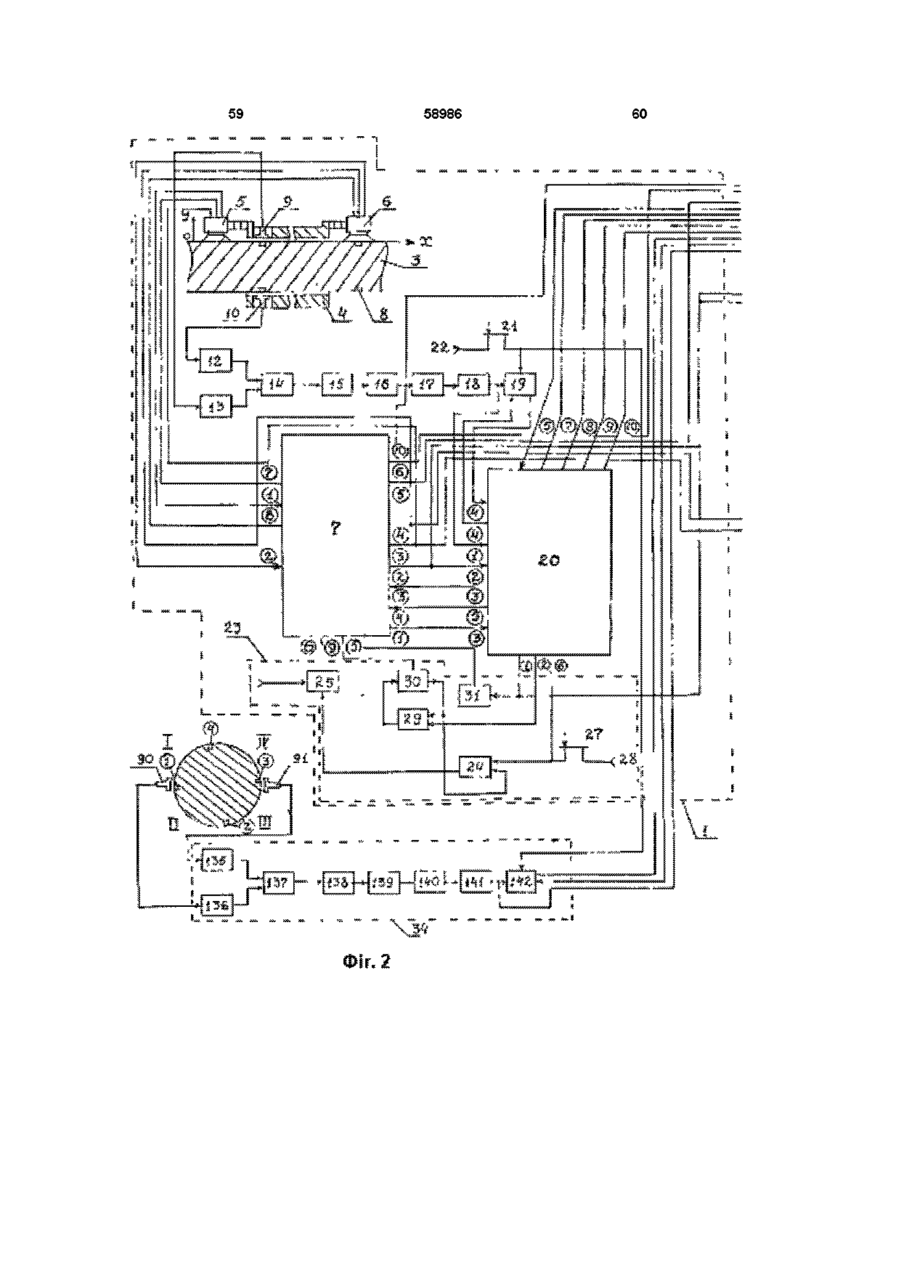
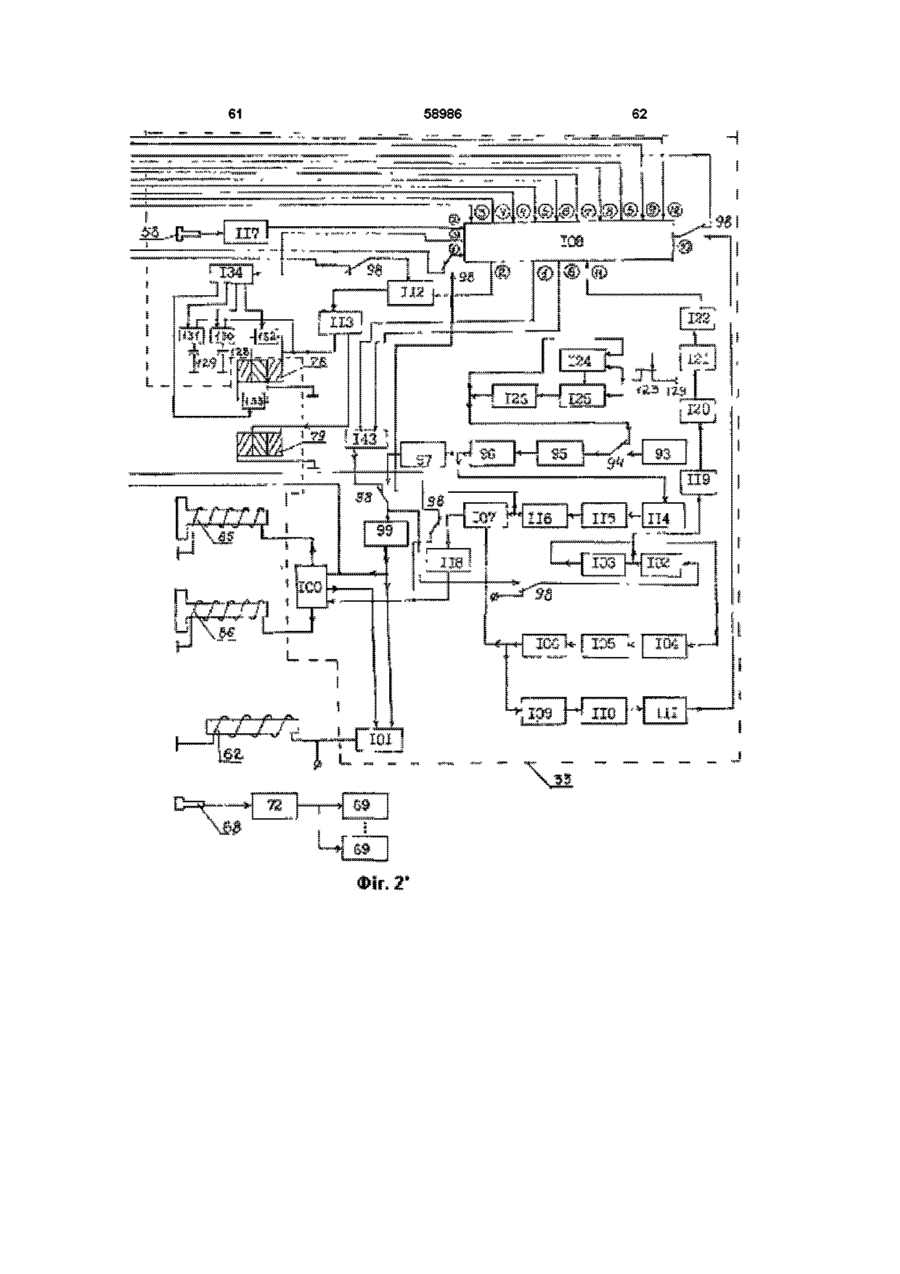
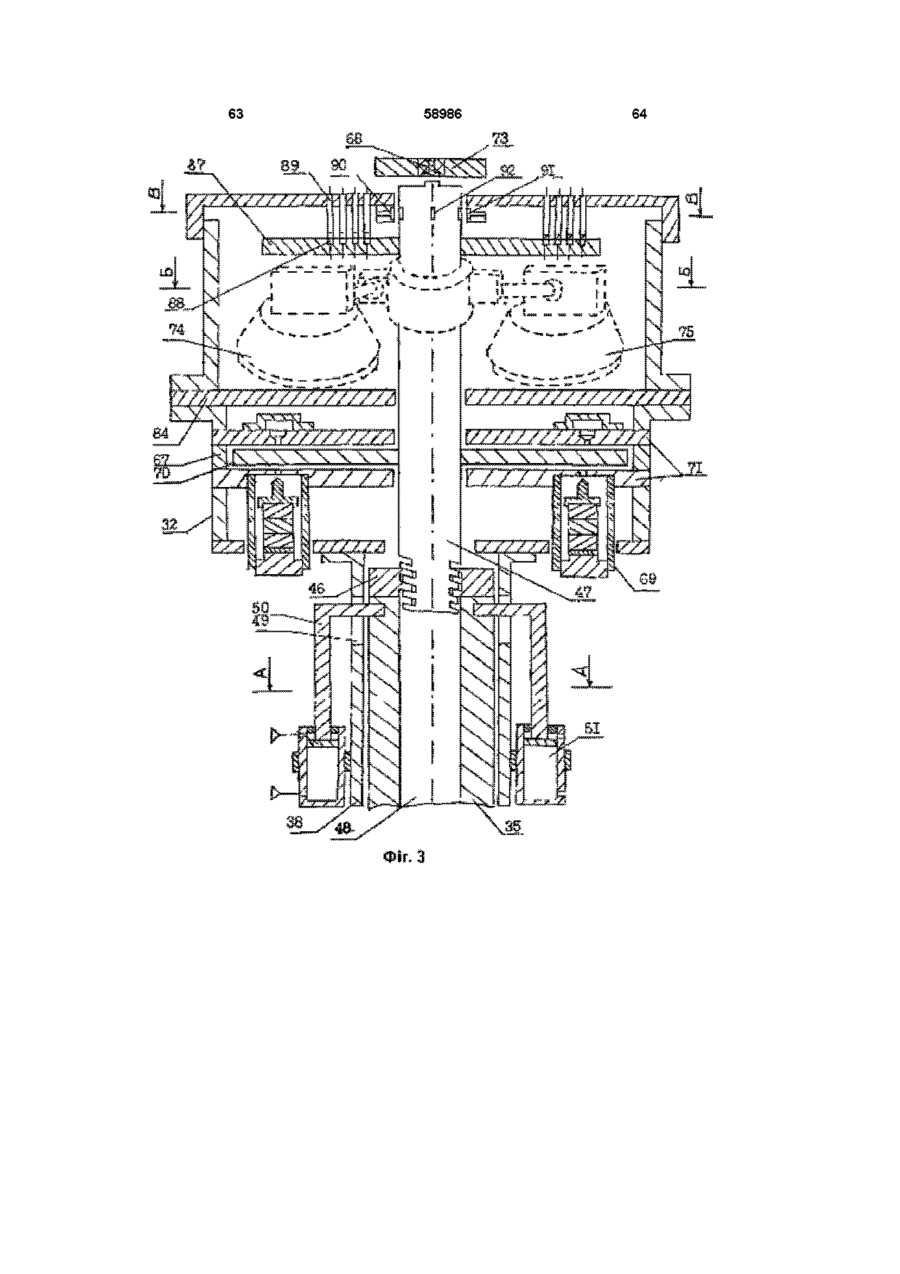
Спосіб переміщення нижньої точки шліфувального круга з дугоподібною шліфуючою поверхнею по розрахунковій траєкторії, що включає установлення нижньої точки шліфувального круга в початкову точку розрахункової траєкторії, задання на дискретах траєкторії переміщення нижньої точки по координаті X розрахункових приростів координати Y нижньої точки шліфувального круга, вимірювання і оцінювання на кожному j-му кроці мікропереміщення нижньої точки шліфувального круга по розрахунковій траєкторії величини j-го кроку мікропереміщення нижньої точки шліфувального круга по координаті X і величини приросту координати Y нижньої точки шліфувального круга на j-му кроці мікропереміщення, підвищення до максимального відношення сигнал/шум в адитивній суміші сигнал/шум, яка відповідає приросту координати Y нижньої точки шліфувального круга на j-му кроці її переміщення по розрахунковій траєкторії, визначення на кожному інтервалі корекції величини відхилення нижньої точки шліфувального круга по координаті Y від розрахункової траєкторії і корекцію координати Y нижньої точки на перший крок мікропереміщення по розрахунковій траєкторії на наступному інтервалі корекції на величину цього відхилення, корекцію положення нижньої точки шліфувального круга по координаті Y розрахункової траєкторії при малих приростах цієї координати, який відрізняється тим, що задають точки корекції положення нижньої точки шліфувального круга по координаті X розрахункової траєкторії, вимірюють і оцінюють відстані між точкою відліку початку першого інтервалу корекції і першою точкою корекції, а також вимірюють і оцінюють відстані між двома суміжними точками корекції положення нижньої точки шліфувального круга по координаті Y розрахункової траєкторії її переміщення на величину накопиченої погрішності положення на цих інтервалах корекції, задають точки корекції положення нижньої точки шліфувального круга по координаті Y розрахункової траєкторії, вимірюють і оцінюють величини інтервалів переміщення нижньої точки шліфувального круга по координаті Y, які відповідають інтервалам між двома суміжними точками корекції положення нижньої точки шліфувального круга по координаті Y розрахункової траєкторії її переміщення на величину накопиченої погрішності на цих інтервалах переміщення, розраховують відстані від початкової точки розрахункової траєкторії по координаті Y до кінців інтервалів переміщення нижньої точки шліфувального круга по координаті Y, які відповідають кінцям інтервалів між двома суміжними точками корекції положення нижньої точки шліфувального круга по координаті Y, в процесі переміщення нижньої точки шліфувального круга з дугоподібною шліфуючою поверхнею по розрахунковій траєкторії виконують корекцію її положення на розрахунковій траєкторії по точках корекції положення нижньої точки шліфувального круга по координаті X, для чого в момент часу ідентифікації n -ої точки корекції положення нижньої точки шліфувального круга по координаті Х розрахункової траєкторії фіксують положення цієї нижньої точки на розрахунковій траєкторії, n -ну точку корекції положення нижньої точки шліфувального круга по координаті X приймають як початкову точку розрахункової траєкторії по координаті Х, розраховують величини приростів координати Y нижньої точки шліфувального круга для кожної дискрети її мікропереміщення по координаті X відносно n -ої точки корекції положення нижньої точки по цій координаті, переміщують нижню точку шліфувального круга по розрахунковій траєкторії відносно n -ої точки корекції її положення по координаті X, для чого на кожному кроці мікропереміщення нижньої точки шліфувального круга по координаті X координаті Y нижньої точки задають розрахункові величини приростів відносно n -ої точки корекції її положення по координаті X, в процесі переміщення нижньої точки шліфувального круга з дугоподібною шліфуючою поверхнею по розрахунковій траєкторії виконують також корекцію її положення на розрахунковій траєкторії по координаті Y по точках корекції положення нижньої точки шліфувального круга по координаті Y між точками корекції її положення по координаті X для чого в моменти часу ідентифікації на j-му кроці мікропереміщення нижньої точки шліфувального круга по розрахунковій траєкторії чергової точки корекції її положення по координаті Y розраховують потрібну величину переміщення цієї нижньої точки по координаті Y на момент часу ідентифікації n -ої точки корекції положення нижньої точки по координаті Y, по номеру точки корекції положення нижньої точки по координаті Y порівнюють відстань нижньої точки по координаті Y від початкової точки розрахункової траєкторії на момент часу ідентифікації n -ої точки корекції положення нижньої точки шліфувального круга по координаті Y розрахункової траєкторії, розраховують величину відхилення положення нижньої точки на розрахунковій траєкторії по координаті Y на момент часу ідентифікації n -ої точки корекції її положення по координаті Y, коректують величину приросту координати Y нижньої точки шліфувального круга на j+1 крок її мікропереміщення по розрахунковій траєкторії на величину погрішності положення нижньої точки шліфувального круга по координаті Y розрахункової траєкторії і на j+1 кроку мікропереміщення по розрахунковій траєкторії нижню точку шліфувального круга установлюють в розрахункову точку траєкторії її переміщення по координаті Y, нижню точку шліфувального круга з дугоподібною шліфуючою поверхнею переміщують по розрахунковій траєкторії і фіксують цю точку шліфувального круга в кінцевій точці розрахункової траєкторії.
Текст
Спосіб переміщення нижньої точки шліфувального круга з дугоподібною шліфуючою поверхнею по розрахунковій траєкторії, що включає установлення нижньої точки шліфувального круга в початкову точку розрахункової траєкторії, задания на дискретах траєкторії переміщення нижньої точки по координаті X розрахункових приростів координати Y нижньої точки шліфувального круга, вимірювання і оцінювання на кожному j-му кроці мікропереміщення нижньої точки шліфувального круга по розрахунковій траєкторії величини j-ro кроку мікропереміщення нижньої точки шліфувального круга по координаті X і величини приросту координати Y нижньої точки шліфувального круга на j-му кроці мікропереміщення, підвищення до максимального відношення сигнал/шум в адитивній суміші сигнал/шум, яка відповідає приросту координати Y нижньої точки шліфувального круга на j му кроці и переміщення по розрахунковій траєкторії, визначення на кожному інтервалі корекції величини відхилення нижньої точки шліфувального круга по координаті Y від розрахункової траєкторії і корекцію координати Y нижньої точки на перший крок мікропереміщення по розрахунковій траєкторії на наступному інтервалі корекції на величину цього відхилення, корекцію положення нижньої точки шліфувального круга по координаті Y розрахункової траєкторії при малих приростах цієї координати, який відрізняється тим, що задають точки корекції положення нижньої точки шліфувального круга по координаті X розрахункової траєкторії, вимірюють і оцінюють відстані між точкою відліку початку першого інтервалу корекції і першою точкою корекції, а також вимірюють і оцінюють відстані між двома суміжними точками корекції положення нижньої точки шліфувального круга по координаті Y розрахункової траєкторії и переміщення на величину накопиченої погрішності положення на цих інтервалах корекції, задають точки корекції поло КРУГА видається під відповідальність власника патенту З ДУГОПОДІБНОЮ ження нижньої точки шліфувального круга по координаті Y розрахункової траєкторії, вимірюють і оцінюють величини інтервалів переміщення нижньої точки шліфувального круга по координаті Y, які відповідають інтервалам між двома суміжними точками корекції положення нижньої точки шліфувального круга по координаті Y розрахункової траєкторії и переміщення на величину накопиченої погрішності на цих інтервалах переміщення, розраховують відстані від початкової точки розрахункової траєкторії по координаті Y до КІНЦІВ інтервалів переміщення нижньої точки шліфувального круга по координаті Y, які відповідають кінцям інтервалів між двома суміжними точками корекції положення нижньої точки шліфувального круга по координаті Y, в процесі переміщення нижньої точки шліфувального круга з дугоподібною шліфуючою поверхнею по розрахунковій траєкторії виконують корекцію її положення на розрахунковій траєкторії по точках корекції положення нижньої точки шліфувального круга по координаті X, для чого в момент часу ідентифікації п -оі точки корекції положення нижньої точки шліфувального круга по координаті X розрахункової траєкторії фіксують положення цієї нижньої точки на розрахунковій траєкторії, п -ну точку корекції положення нижньої точки шліфувального круга по координаті X приймають як початкову точку розрахункової траєкторії по координаті X, розраховують величини приростів координати Y нижньої точки шліфувального круга для кожної дискрети и мікропереміщення по координаті X відносно п -оі точки корекції положення нижньої точки по цій координаті, переміщують нижню точку шліфувального круга по розрахунковій траєкторії відносно п -оі точки корекції и положення по координаті X, для чого на кожному кроці мікропереміщення нижньої точки шліфувального круга по координаті X координаті Y нижньої точки задають розрахункові величини приростів відносно п -оі точки корекції и положення по координаті X, в процесі переміщення нижньої точки шліфувального круга з дугоподібною шліфуючою поверхнею по розрахунковій траєкторії виконують також корекцію и положення на розрахунковій траєкторії по координаті Y по точках корекції положення нижньої точки (О 00 о> 00 ю 58986 шліфувального круга по координаті Y між точками корекції и положення по координаті X для чого в моменти часу ідентифікації на j-му кроці мікропереміщення нижньої точки шліфувального круга по розрахунковій траєкторії чергової точки корекції и положення по координаті Y розраховують потрібну величину переміщення цієї нижньої точки по координаті Y на момент часу ідентифікації п -оі точки корекції положення нижньої точки по координаті Y, по номеру точки корекції положення нижньої точки по координаті Y порівнюють відстань нижньої точки по координаті Y від початкової точки розрахункової траєкторії на момент часу ідентифікації п -оі точки корекції положення нижньої точки шліфувального круга по координаті Y розрахункової траєкторії, розраховують величину відхилення положення нижньої точки на розрахунковій траєкторії по координаті Y на момент часу ідентифікації п -оі точки корекції и положення по координаті Y, коректують величину приросту координати Y нижньої точки шліфувального круга на j+1 крок и мікропереміщення по розрахунковій траєкторії на величину погрішності положення нижньої точки шліфувального круга по координаті Y розрахункової траєкторії і на j+1 кроку мікропереміщення по розрахунковій траєкторії нижню точку шліфувального круга установлюють в розрахункову точку траєкторії и переміщення по координаті Y, нижню точку шліфувального круга з дугоподібною шліфуючою поверхнею переміщують по розрахунковій траєкторії і фіксують цю точку шліфувального круга в кінцевій точці розрахункової траєкторії Винахід відноситься до верстатобудування і може бути використаний при конструюванні суперпрецизійного двохкоординатного верстата Відомий патент України "Спосіб переміщення вершини різця по розрахунковій траєкторії та пристрій для його реалізації" Спосіб переміщення вершини різця по розрахунковій траєкторії вибраний в якості прототипа Спосіб прототипа полягає у наступному Розрахункова траєкторія переміщення вершини різця задається поліномом "п"-го ступеня Розраховуються прирости Ay(j) координати "У" вершини різця на величину корекції координати "У" вершини різця на перший крок наступного інтервалу корекції На першому кроці наступного інтервалу корекції вершині різця задають скоректовану величину приросту Крім того, в процесі переміщення вершини різця по розрахунковій траєкторії для підвищення точності переміщення забезпечується максимум відношення сигнал/шум на виході пристрою управління переміщенням вершини різця по координаті "У" Забезпечується висока точність відпрацювання малих приростів координати "У" вершини різця на тій ДІЛЯНЦІ траєкторії переміщення, де вони сумірні з шумом пристрою управлінця переміщенням по координаті "У" Ці заходи не виключають накопичення погрішності положення вершини різця на розрахунковій траєкторії із-за погрішності оцінювання величини переміщення вершини різця по координатам "X" і кожній дискреті переміщення по координаті "X" Вершина різця встановлюється в початкову точку розрахункової траєкторії і переміщується по координаті "X" з кроком Ax(j)=m=const На кожному кроці переміщення вершини різця по координаті "X" координаті "У" вершини різця задають розрахунковий приріст Ay(j) і переміщують її по розрахунковій траєкторії Виконується вимірювання і оцінювання кожного крока переміщення вершини різця по координатам "X" і "У" Встановлюють величину штервала корекції положення вершини різця на розрахунковій траєкторії по координаті "У", наприклад, через кожні "к" кроків переміщень по розрахунковій траєкторії На кожному інтервалі корекції після закінчення "к"-го крока переміщення по оцінкам кроків переміщень розраховується величина переміщення вершини різця на інтервалі корекції по координаті "X" Так як по координаті "X" вершина різця переміщується з постійним кроком переміщення, кожний крок вимірюється з високою точністю і виконується його оцінювання, величина переміщення вершини різця на інтервалі корекції вважається істинною По величині переміщення вершини різця по координаті "X" на інтервалі корекції розраховується еталонна величина приросту координата "У" на цьому інтервалі корекції По оцінкам величин приростів ДуО) вершини різця на інтервалі корекції обчислюють величину реального приросту цієї координати і обчислюють иуи Задача, що вирішується, полягає у підвищенні точності переміщення нижньої точки шліфувального круга по розрахунковій траєкторії за рахунок уведення у спосіб прототипа додаткового рівня корекції - корекції положення нижньої точки шліфувального круга по координатам "X" і "У" по точкам корекції, що дозволяє скоректувати положення нижньої точки на розрахунковій траєкторії на величину накопиченої погрішності на інтервалі між двома точками корекції із-за погрішностей вимірювання і оцінювання поточного положення нижньої точки шліфувального круга Рішення цієї задачі досягається тим, що спосіб переміщення нижньої точки шліфувального круга з дугоподібною шліфуючою поверхнею по розрахунковій траєкторії, що включає установлення нижньої точки шліфувального круга в початкову точку розрахункової траєкторії, завдання на дискретах траєкторії переміщення нижньої точки по координаті "X" розрахункових приростів координаті "У" нижньої точки шліфувального круга, вимірювання і оцінювання на кожному j-му кроці мікропереміщення нижньої точки шліфувального круга по роз 58986 рахунковій траєкторії величини j-ro крока мікропереміщення нижньої точки шліфувального круга по координаті "X" і величини приросту координати "У" нижньої точки шліфувального круга на j-му кроці мікропереміщення, підвищення до максимального відношення сигнал/шум в адидивній суміші сигнал/шум, яка відповідає приросту координати "У" нижньої точки шліфувального круга на j-му кроці її переміщення по розрахунковій траєкторії, визначення на кожному інтервалі корекції величини відхилення нижньої точки шліфувального круга по координаті "У" від розрахункової траєкторії і корекцію координати "У" нижньої точки на перший крок мікропереміщення по розрахунковій траєкторії на наступному інтервалі корекції на величину цього відхилення, корекцію положення нижньої точки шліфувального круга по координаті "У" розрахункової траєкторії при малих приростах цієї координати, згідно винаходу, задають точки корекції положення нижньої точки шліфувального круга по координаті "X" розрахункової траєкторії, вимірюють і оцінюють відстані між точкою відліку початку першого інтервалу корекції і першою точкою корекції, а також вимірюють і оцінюють відстані між двома суміжними точками корекції положення нижньої точки шліфувального круга по координаті "X" розрахункової траєкторії и переміщення на величину накопиченої погрішності положення на цих інтервалах корекції, задають точки корекції положення нижньої точки шліфувального круга по координаті "У" розрахункової траєкторії, вимірюють і оцінюють величини інтервалів переміщення нижньої точки шліфувального круга по координаті "У", які відповідають інтервалам між двома суміжними точками корекції положення нижньої точки шліфувального круга по координаті "У" розрахункової траєкторії и переміщення на величину накопиченої погрішності на цих інтервалах переміщення, розраховують відстані від початкової точки розрахункової траєкторії по координаті "У" до КІНЦІВ інтервалів переміщення нижньої точки шліфувального круга по координаті "У", які відповідають кінцям інтервалів між двома суміжними точками корекції положення нижньої точки шліфувального круга по координаті "У", в процесі переміщення нижньої точки шліфувального круга з дугоподібною шліфуючою поверхнею по розрахунковій траєкторії виконують корекцію її положення на розрахунковій траєкторії по точкам корекції положення нижньої точки шліфувального круга по координаті "X" для чого в момент часу ідентифікації "п"-оі точки корекції положення нижньої точки шліфувального круга по координаті "X" розрахункової траєкторії фіксують положення цієї нижньої точки на розрахунковій траєкторії, "п"-ну точку корекції положення нижньої точки шліфувального круга по координаті "X" приймають в якості початкової точки розрахункової траєкторії по координаті "X", розраховують величини приростів координати "У" нижньої точки шліфувального круга для кожної дискрети її мікропереміщення по координаті "У" відносно "гї'-оі точки корекції положення нижньої точки по цій координаті, переміщують нижню точку шліфувального круга по розрахунковій траєкторії відносно "п"-оі точки корекції и положення по координаті "X" для чого на кожному кроці мікропереміщення нижньої точки шліфувального круга по координаті "X" координаті "У" нижньої точки задають розрахункові величини приростів відносно "гї'-оі точки корекції и положення по координаті "X", в процесі переміщення нижньої точки шліфувального круга з дугоподібною шліфуючою поверхнею по розрахунковій траєкторії виконують також корекції и положення на розрахунковій траєкторії по координаті "У" по точкам корекції положення нижньої точки шліфувального круга по координаті "У" між точками корекції и положення по координаті "X" для чого в моменти часу ідентифікації на j-му кроці мікропереміщення нижньої точки шліфувального круга по розрахунковій траєкторії чергової точки корекції и положення по координаті "У" розраховують потрібну величину переміщення цієї нижньої точки по координаті "У" на момент часу ідентифікації "п"-оі точки корекції положення нижньої точки по координаті "У", по номеру точки корекції положення нижньої точки по координаті "У" злічують відстань нижньої точки по координаті "У" від початкової точки розрахункової траєкторії на момент часу ідентифікації "п"-оі точки корекції положення нижньої точки шліфувального круга по координаті "У" розрахункової траєкторії, розраховують величину відхилення положення нижньої точки на розрахунковій траєкторії по координаті "У" на момент часу ідентифікації "п"-оі точки корекції и положення по координаті "У, коректують величину приросту координати "У" нижньої точки шліфувального круга на j+1 крок її мікропереміщення по розрахунковій траєкторії на величину погрішності положення нижньої точки шліфувального круга по координаті "У" розрахункової траєкторії і на j+1 кроці мікропереміщення по розрахунковій траєкторії нижню точку шліфувального круга установлюють в розрахункову точку траєкторії и переміщення по координаті "У", нижню точку шліфувального круга з дугоподібною шліфуючою поверхнею переміщують по розрахунковій траєкторії і фіксують цю точку шліфувального круга в кінцевій точці розрахункової траєкторії Причинно-наслідковий зв'язок сукупності ознак технічного рішення, що заявляється, з досягаємим технічним результатом полягає у наступному На Фіг 1 представлений суперпрецизійний двохкоординатний шліфувальний верстат, формоутворююча система якого включає наступні пристрої В станині верстата встановлена аеростатична шпиндельна опора 149, яка оснащена пристроєм стабілізації радіального положення осі обертання вала опори і пристроєм стабілізації осьового положення плоскості планшайби (див патент України від 30 10 98 р "Пристрій компенсації радіальних навантажень на вал радіальної аеростатичної опори №25727 А) В порожнині планшайби опори встановлений пристрій 150 суміщення нижньої точки шліфувального круга з віссю обертання вала шпиндельної опори (див патент України №36959 А від 16 04 2001 р "Пристрій суміщення нижньої точки шліфувального круга з дугоподібною шліфуючою поверхнею з віссю обертання вала шпиндельної опори") Лінійну напрямну, наприклад, аеростатичну лі 58986 нійну напрямну, яка оснащена пристроєм стабілізації положення рухомого елемента відносно нерухомої у просторі плоскості (див патент України №14905 А від 04 03 97р "Спосіб стабілізації положення рухомого елемента аеростатичної напрямної та пристрій для його здійснення") Рухомий елемент аеростатичної напрямної переміщується п'єзоелектричним двигуном (див патент України №36956 А від 16 04 2001 р "П'єзоелектричний двигун") П'єзоелектричний двигун забезпечує безперервне крокове або крокове переміщення рухомого елемента з встановленою величиною кроку мікропереміщення по координаті "X" траєкторії переміщення (переміщення нижньої точки шліфувального круга по координаті "X" траєкторії переміщення) Причому кожний крок мікропереміщення установлюється і вимірюється з погрішністю, що не перевищує 0,01 мкм На основі рухомого елемента лінійної напрямної встановлений пристрій 32 для безперервного крокового або крокового переміщення електрошпинделя з шліфувальним кругом (нижньої точки шліфувального круга) по координаті "У" траєкторії переміщення Причому, кожний j-ий крок Ay(j) переміщення нижньої точки шліфувального круга по координаті "У" відповідає приросту цієї координати на j-му кроці мікропереміщення по координаті "X" Нехай траєкторія переміщення нижньої точки шліфувального круга задана ортогональним поліномом Чєбишева (див патент України №20749 А від 29 08 97 р "Спосіб обробки деталей криволінійного перерізу, симетричних відносно осі обертання, шліфувальним кругом з дугоподібною шліфуючою поверхнею") Розраховують прирости координати "У" нижньої точки шліфувального круга на кожній дискреті Ax(j) и мікропереміщення по координаті "X" Встановлюють нижню точку шліфувального круга в початкову точку розрахункової траєкторії Переміщують нижню точку по координаті "X" з кроком Ax(j) =m На кожному кроці мікропереміщення по координаті "X" координаті "У" нижньої точки задають розрахунковий приріст ДуО) і переміщують нижню точку шліфувального круга по розрахунковій траєкторії Для переміщення нижньої точки шліфувального круга по розрахунковій траєкторії з високою точністю уводять двохрівневу корекцію положення нижньої точки на розрахунковій траєкторії Перший рівень корекції полягає утому, що на кожному j-му кроці мікропереміщення нижньої точки шліфувального круга по координаті "X" виконується оцінювання величини її поточного переміщення за j кроків мікропереміщень оптимальним ЛІНІЙНИМ фільтром Калмана На кожному j-му кроці мікропереміщення нижньої точки шліфувального круга по координаті "У" отримують асимптотично незміщену оцінку крока мікропереміщення і розраховують величину поточного переміщення нижньої точки по координаті "У" Встановлюють величину штервала корекції положення нижньої точки на розрахунковій траєкторії по координаті "У", наприклад, через кожні "г" кроків мікропереміщень по розрахунковій траєкторії На кожному q-му інтервалі корекції 8 після закінчення r-го крока мікропереміщення по оцінкам величини поточного переміщення нижньої точки по координаті "X" розраховується дійсна величина її переміщення по цій координаті на q-му інтервалі корекції, а по ній розраховується еталона величина приросту координати "У" нижньої точки на q-му інтервалі корекції По оцінкам величин приростів координати "У" нижньої точки на q -му інтервалі корекції обчислюють величину реального приросту цієї координати і обчислюють величину відхилення нижньої точки від розрахункової траєкторії по координаті "У" Коректують величину приросту координати "У" на величину цього відхилення і на q-r+1 кроці мікропереміщення координаті "У" нижньої точки задають скоректовану величину приросту В процесі переміщення нижньої точки по розрахунковій траєкторії для підвищення точності переміщення забезпечується максимальне відношення сигнал/шум на виході пристрою управління переміщенням по координаті "У" Забезпечується висока точність відпрацювання малих приростів координати "У" нижньої точки на тих ділянках траєкторії переміщення, де ці прирости сумірні з шумом пристрою управління переміщенням Другий рівень корекції положення нижньої точки шліфувального круга на розрахунковій траєкторії полягає у тому, що уводяться точки корекції положення нижньої точки на розрахунковій траєкторії по координатам "X" і "У" на величину накопиченої погрішності на інтервалі корекції Для цього точно визначаються відстані між точками корекції по координатах розрахункової траєкторії В момент часу ідентифікації n-оі точки корекції положення нижньої точки по координаті "У" Haj-му кроці мікропереміщення, розраховується відхилення по координаті "У" положення нижньої точки від розрахункового, на j+1 кроці мікропереміщення коректується положення нижньої точки на величину цього відхилення Нижня точка установлюється в розрахункову точку по координаті "У" В момент часу ідентифікації n-оі точки корекції по координаті "X" зупиняють переміщення нижньої точки по розрахунковій траєкторії Координату "X" n-оі точки корекції приймають в якості початкової точки (по координаті "X") розрахункової траєкторії, чим усувають накопичену погрішність на інтервалі корекції Розраховують прирости A y H T ( j ) координати "У" нижньої точки відносно n-оі точки корекції, чим усувають накопичену погрішність положення нижньої точки по координаті "У" і переміщують нижню точку шліфувального круга по розрахунковій траєкторії Винахід пояснюється кресленнями Фіг 1 - суперпрецизійний двохкоординатний верстат Фіг 2 - функціональна схема пристрою переміщення нижньої точки шліфувального круга по розрахунковій траєкторії Фіг 3 - пристрій крокового переміщення нижньої точки шліфувального круга по координаті "У" розрахункової траєкторії Фіг 4 - переріз Фіг 3 по А-А Фіг 5 - пристрій крокового переміщення нижньої точки шліфувального круга по координаті "У" 58986 10 розрахункової траєкторії з пристроєм вимірювання кроку мікропереміщення нижньої точки шліфувального круга (загальний вигляд) Фіг 6 - пристрій вимірювання кроку мікропереміщення нижньої точки шліфувального круга по координаті "У" Фіг 7 - переріз Фіг 3 по Б-Б Фіг 8 - часова діаграма роботи пристрою управління переміщенням нижньої точки шліфувального круга по координаті "У" Пристрій переміщення нижньої точки шліфувального круга з дугоподібною шліфуючою поверхнею по розрахунковій траєкторії (Фіг1) включає два електрично зв'язаних і синхронно працюючих пристрої пристрій 1 переміщення нижньої точки шліфувального круга з дугоподібною шліфуючою поверхнею по координаті "X" розрахункової траєкторії і пристрій 2 переміщення нижньої точки шліфувального круга з дугоподібною шліфуючою поверхнею по координаті "У" розрахункової траєкторії ції знаходяться над "лисками" 8 ідентифікації точок корекції Причому, величина цього порога відповідає визначеному (фіксованому) положенню основ датчиків 9 і 10 над "лисками" 8, тобто коли точка корекції знаходиться під центром основи датчика 9 ідентифікації точок корекції Підсилювач 16 служить для підвищення крутизни переднього фронта напруги, яка надходить з виходу порогового пристрою 15 Напруга з виходу підсилювача 16 надходить на диференціюючий ланцюжок 17 Короткі продиференційовані імпульси з виходу диференціюючого ланцюжка 17 надходять на вхід очікуючого блокінг-генератора 18 Очікуючий блокінг-генератор 18 генерує короткий імпульс, передній фронт якого співпадає з моментом часу підходу чергової точки корекції під центр основи датчика 9 ідентифікації точок корекції З виходу очікуючого блокінг-генератора 18 імпульси надходять на лічильний вхід лічильника 19 номера точок корекції і й якості сигнала "точка корекції" в перший обчислювач 20 Пристрій 1 (Фіг 2) включає лінійну напрямну З, 4 в склад якої входить основа 3 лінійної напрямної і рухомий елемент 4 лінійної напрямної (див патент України "Спосіб стабілізації положення рухомого елемента аеростатичної напрямної та пристрій для його здійснення", №14905 А від 04 03 1997р) Переміщення рухомого елемента 4 здійснюється п'єзоелектричним двигуном 5, 6, 7, який включає штовхач 5 прямого хода, штовхач 6 зворотного хода та пристрій 7 управління переміщенням рухомого елемента лінійної напрямної (див патент України "П'єзоелектричний двигун", №36957 А від 16 04 2001 р ) На верхній і нижній плоскостях основи 3 лінійної напрямної в одній плоскості, яка перпендикулярна осі симетрії основи 3, виконані "лиски" 8 ідентифікації точок корекції, а в рухомому елементі 4 лінійної напрямної один над другим встановлені датчики 9 і 10 ідентифікації точок корекції Причому, осі симетрії датчиків 9 і 10 лежать на одній прямій В якості точок корекції положення нижньої точки шліфувального круга по координаті "X" приймаються точки поверхні основи 3 лінійної напрямної під центром основи датчика 9 ідентифікації точок корекції при фіксованому положенні датчиків 9 і 10 відносно "лисок" 8 ідентифікації точок корекції Кнопка 21 служить для підключення джерела 22 постійної напруги до входу установки в "ноль" лічильника 19 Пристрій 1 переміщення нижньої точки шліфувального круга по координаті "X" розрахункової траєкторії включає також (Фіг 2) блок 23 пуску і зупинення переміщення нижньої точки шліфувального круга по розрахунковій траєкторії В склад блока 23 входить тригер 24 включення живлення, високим потенціалом з одиничного виходу якого відкривається закритий в вихідному стані ключ 25 Ключ 25 забезпечує підключення джерела 26 живлення задаючого мультивібратора пристрою 7 управління переміщенням рухомого елемента лінійної напрямної до задаючого мультивібратора пристрою 7 В склад пристрою 1 входить блок 11 ідентифікації точок корекції положення нижньої точки шліфувального круга по координаті "X" Блок 11 включає вимірювачі 12 і 13 величин зазорів під датчиками 9 і 10 ідентифікації точок корекції Вихідна напруга вимірювачів 12 і 13 надходить на алгебраїчний суматор 14 (Ялышев А У "Многофункциональные аналоговые регулирующие устройства автоматики", М » Машиностроение, 1981г) Отже вихідна напруга суматора 14 для фіксованого положення рухомого елемента 4 по координаті "X" при його зміщені по висоті зазора зберігається постійною Напруга вимірювачів 12 і 13 з виходу суматора 14 надходить на пороговий пристрій 15 Вихідна напруга суматора 14 досягає величини порога порогового пристрою 15 тільки тоді, коли датчики 9 і 10 ідентифікації точок корек Для переміщення рухомого елемента 4 лінійної напрямної 3, 4 в автономному режимі служить кнопка 27 "пуск", якою джерело 28 постійної напруги підключається до одиничного входа тригера 24 включення живлення Тригер 29 зупинки і схема " і " ЗО забезпечують зупинку переміщення нижньої точки шліфувального круга по сигналу першого обчислювача 20, який надходить на j-му мікропереміщенні нижньої точки по розрахунковій траєкторії, після закінчення цього крока мікропереміщення Очікуючий блокінг-генератор 31 зупинки служить для зупинки по сигналу першого обчислювача 20 переміщення нижньої точки шліфувального круга по розрахунковій траєкторії в момент часу підходу чергової точки корекції положення нижньої точки по координаті "X" розрахункової траєкторії під центр основи датчика 9 ідентифікації точок корекції Пристрій 2 переміщення нижньої точки шліфувального круга з дугоподібною шліфуючою поверхнею по координаті "У" розрахункової траєкторії включає пристрій 32 крокового переміщення нижньої точки шліфувального круга по координаті "У" (Фіг 3,4), блок 33 управління переміщенням нижньої точки шліфувального круга по координаті "У" (Фіг 2) і блок 34 ідентифікації точок корекції положення нижньої точки шліфувального круга по координаті "У" 12 11 58986 Пристрій 32 крокового переміщення включає крока мікропереміщення Причому, електромагніт повзун 35, який служить для установки, наприклад, 62, якщо в час переміщення повзуна на його обмоелектрошпинделя 36 з шліфувальним кругом 37 тку подана напруга, залишається нерухомим 65 (Фіг 1) Повзун 35 переміщується в корпусі 38 повобмежуюча шайба зуна (Фіг 3,4), який має передню стінку 39 (Фіг 5), Початкове положення осердя 64 електромагзадню стінку 40, праву стінку 41 і ліву стінку 42 ніта 62 в отворах 63 задається пружинами 66, одні КІНЦІ яких прикріплені до електромагніта 62, а другі В кожній СТІНЦІ корпуса 38 на одному рівні ви- до стрижня 56 конані (Фіг 3,5) жиклери 43 подачі газу в зазори 44, що утворені внутрішніми поверхнями стінок 39-42 і В склад пристрою 32 крокового переміщення ВІДПОВІДНИМИ гранями повзуна 35 Отже кожна стінижньої точки шліфувального круга по координаті нка корпуса 38 утворює з гранями повзуна 35 пло"У" (ФігЗ) входить також аеростатичний підп'ятник скі аеростатичні опори 45, що забезпечує силове 67, який утримує гвинт 47 в осьовому напрямку замикання повзуна (ас СРСР №1590855 "Аэростатический подпятник", від 22 08 1989р), який включає датчик 68, що На верхньому торці повзуна укріплена гайка забезпечує вимірювання величини осьового змі46 (ФігЗ), яка переміщується по гвинту 47 Гвинт щення гвинта 47, регулятори 69 тиску газу, п'яту 47 входить у виконаний в повзуні 35 отвір 48 70, підп'ятники 71, а також блок 72 стабілізації В склад пристрою 32 крокового переміщення осьового положення гвинта 47 переміщення повнижньої точки по координаті "У" входить також зуна Аеростатичний підп'ятник і гайка 46 забезпемеханізм компенсації зазору кінематичного ланцючують силове замикання гвинта 47 га, який включає прорізи 49, штоки 50 пневмоциліндрів, пневмоциліндри 51 Прорізи 49 виконані в Механізм дискретного обертання гвинта 47 передній СТІНЦІ 39 і задній СТІНЦІ 40 корпуса 38 поввключає штовхач 74 прямого хода і штовхач 75 зуна 35 В прорізах 49 розміщені штоки 50 пневзворотного хода (див патент України "П'єзоелектмоциліндрів 51 Штоки 50 прикріплені до повзуна ричний двигун", №36957 А від 16 04 2001 р) Пе35 Пневмоциліндри 51 забезпечують прилягання реміщення повзуна у прямому напрямку здійснюз постійною силою граней різьби гайки 46 до грається штовхачем 74 прямого хода У цьому ней різьби гвинта 47 Крім того, кут нахилу (крок) випадку штовхач 75 зворотного хода виконує роль різьби гайки 46 і гвинта 47, а також зусилля пневфіксатора положення гвинта 47 на час підтягуванмоциліндрів 51 можуть бути вибрані такими, що ня штовхача 74 Штовхачі 74 і 75 діють на плечі 76 момент обертання гвинта 47 для переміщення (Фіг 7) обертання гвинта 47 за допомогою кулькоповзуна 35 в напрямку зусилля пневмоциліндрів вих упорів 77, укріплених на п'єзостовпах 78 і 79 штовхачів прямого і зворотного хода, ВІДПОВІДНО 51 може приймати негативні значення утому смиПритиск кулькових упорів 77 до плеч 76 обертання слі, що під дією пневмоциліндрів 51 гайка 46 повгвинта здійснюється пружинами 80 81 - регулювазуна буде обертати гвинт 47 і для позиціонування льні гайки повзуна 35 до гвинта 47 необхідно прикладати утримуюче зусилля Отже виключаються ривки в Відновлення орієнтації штовхачів 74 і 75 відмоменти часу початка переміщення повзуна 35, які носно плеч 76 обертання гвинта здійснюється виникають при переході від тертя спокою до тертя пружинами 82, одні КІНЦІ ЯКИХ прикріплені до штовплину в ланці гвинт-гайка хачів 74 і 75, а другі до кронштейнів 83 На правій СТІНЦІ 41 корпуса 38 повзуна 35 Переміщуються штовхачі по диску 84 (ФігЗ), (Фіг 5,6) установлений пристрій 52 вимірювання прикріплюючись до нього за допомогою електрокрока мікропереміщення нижньої точки шліфувамагніта 85 штовхача прямого хода і електромагнільного круга по координаті "У" В оклад пристрою та 86 штовхача зворотного хода Електричні сигнали на штовхачі 74 і 75 надходять через 52 входить корпус 53, в якому виконані пази 54 обертаючийся контактний пристрій, який включає При чому корпус 53 установлений так, що пази 54 диск 87 контактного пристрою, укріплений на гвинзнаходяться напроти паза 55, виконаного в СТІНЦІ ту 47, що обертається синхронно з штовхачами 74 41 корпуса 38 повзуна 35 В пазах 54 і 55 переміі 75 На диску 87 установлені кільцеві контакти 88, щується стрижень 56, укріплений в повзуні 35 89 - нерухомі контакти На ДІЛЯНЦІ стрижня 56 (Фіг 6), який переміщується в середині корпуса 53, установлена пластиЗ зазором відносно гвинта 47 (Фіг 2,3) діаметна 57 По вимірюванню величини зазора між пласрально протилежно установлені датчики 90 і 91 тиною 57 і основою датчика 58 величини ЛІНІЙНОГО ідентифікації точок корекції положення нижньої переміщення вимірюється величина крока мікроточки шліфувального круга по координаті "У" На переміщення повзуна 35 Датчик 58 установлений гвинті 47 під датчиками 90 і 91 виконані "лиски" 92 на напрямній 59 пристрою 52, яка переміщується в ідентифікації точок корекції (чотири у даному присередині корпуса 53 Початкова величина зазора кладі, Фіг 2) "Лиски" виконуються парами і по діаміж пластиною 57 і основою датчика 58 дорівнює метру друг проти друга нулю і установлюється за допомогою пружин 60 Блок 33 управління переміщенням нижньої точки шліфувального круга (Фіг 2) пристрою 2 переНа стрижні 56 установлені стояки 61 електроміщення нижньої точки по координаті "У" розрахумагніта 62 фіксації напрямної 59, в отворах 63 нкової траєкторії виконує наступні функції яких лежить осердя 64 електромагніта Причому, діаметр отворів 63 перевищує діаметр осердя 64 1 Дискретне переміщення нижньої точки шліна величину максимального крока мікропереміфувального круга по координаті "У" з кроком щення нижньої точки по координаті "У" ДУнт 0). я к и и відповідає величині приросту коорЕлектромагніт 62 призначений для фіксації динати "У" нижньої точки на j-му кроці мікроперенапрямної 59 в корпусі 53 пристрою вимірювання міщення по розрахунковій траєкторії 13 2 Вимірювання 58986 і оцінювання величини ЛУн т 0) приросту координати "У" нижньої точки 3 Розрахунок поточної величини переміщення нижньої точки по координаті "У" на інтервалах корекції и положення по координаті "У" 4 Розрахунок і оцінка відстаней по координаті "У" від початкової точки розрахункової траєкторії до точок корекції положення нижньої точки шліфувального круга по координаті "У" 5 Корекція положення нижньої точки по координаті "У" розрахункової траєкторії Блок 33 управління переміщенням включає задаючий мультивібратор 93 з регулюємим періодом проходження імпульсів Період проходження імпульсів задаючого мультивібратора в автономному режимі роботи визначає відрізок часу, втечи якого здійснюється одне мікропереміщення нижньої точки незалежно від величини цього мікропереміщення Прямокутні імпульси з виходу задаючого мультивібратора 93 через перемикач 94 "безперервно - крок" в положенні "безперервно" надходять на вхід першого диференціюючого ланцюжка 95 Продиференційовані імпульси (Фіг 8,1)95) надходять на вхід першого дюдного обмежувача 96, який пропускає позитивні імпульси Імпульси з виходу першого дюдного обмежувача 96 надходять на запуск першого мультивібратора 97 з одним сталим станом, який по кожному імпульсу дюдного обмежувача 96 генерує прямокутний імпульс, передній фронт якого співпадає з початком періоду проходження імпульсів задаючого мультивібратора 93, а його тривалість менше періоду проходження імпульсів задаючого мультивібратора 93 на час відпускання t B , f l реле 85 і 86 штовхачів 74 і 75 і на час t B i f l H відновлення довжини п'єзостовпів 78 і 79 штовхачів після зняття з них сигналів переміщення (Фіг 8,1)97) Тривалість цих імпульсів визначає час прикріплення штовхача 74 прямого хода при прямому переміщення повзуна 35 (в автономному режимі) або штовхача 75 зворотного хода до диска 84 при зворотному переміщенні З виходу першого мультивібратора 97 прямокутні імпульси через перемикач 98 "зовнішня синхронізація - внутрішня синхронізація" в положенні "внутрішня синхронізація" надходять на перший підсилювач потужності 99, де підсилюються до потужності, достатньої для надійного прикріплення штовхачів 74 і 75 до диска 84 (Фіг 8,1)99) і надходять в комутатор 100 електромагнітів Комутатор 100 електромагнітів забезпечує підключення виходу першого підсилювача потужності 99 до електромагніта 85 штовхача 74 при прямому переміщенні повзуна 35 або до електромагніта 86 штовхача 75 при його зворотному переміщенню Крім того, при прямому переміщенні повзуна 35 в течи часу підключення виходу першого підсилювача 99 потужності до електромагніта 85 з комутатора 100 надходить сигнал на ключ 101 і утримує його у відкритому стані В результаті до першого підсилювача 99 потужності підключається електромагніт 62 пристрою 52 вимірювання крока мікропереміщення нижньої точки шліфувального круга для фіксації напрямної 59 на час прямого переміщення повзуна 35 14 Другий диференціюючий ланцюжок 102 диференціює імпульси першого мультивібратора 97, які надходять на другий дюдний обмежувач 103 Позитивні імпульси з виходу другого дюдного обмежувача 103 надходять на другий мультивібратор 104 з одним сталим станом, третій диференціюючий ланцюжок 105 і третій дюдний обмежувач 106 Другий мультивібратор 104 генерує прямокутний імпульс (Фіг8,ІІю4), передній фронт якого співпадає з переднім фронтом сигналу прикріплення штовхача 74 або 75 (Фіг 8,1)99) і спрацювання електромагніта 62, а його тривалість на менше часу спрацювання електромагнітів 85, 86 і електромагніта 62 пристрою 62 вимірювання крока мікропереміщення Негативні імпульси з виходу третього дюдного обмежувача 106, які відповідають задньому фронту імпульсів другого мультивібратора 104 перекидають тригер 107 прикріплення утримуючого штовхача, що забезпечує відкріплення штовхача 74 або 75, виконуючого роль утримуючого, тільки після прикріплення до диска 84 штовхача 74 або 75, виконуючого роль переміщуючого Сигнал початку переміщення повзуна 35 на другий обчислювач 108 формується третім мультивібратором 109 з одним сталим станом, четвертий диференціюючим ланцюжком 110 і четвертим дюдним обмежувачем 111 (Фіг 8,Uio9,Uiio,Uin) Другий обчислювач 108 є мікро-ЕОМ або персональна ЕОМ з модулем вводу-виводу даних для зв'язку з ЗОВНІШНІМИ функціональними елементами Прикладом такого обчислювача є обчислювач, що включає ЕОМ типа 9825 фірми Hewlett-Расаrd з модулем вводу-виводу Z80-PIO (див Науман Г "Стандартные интерфейсы для измерительной техники", М , Мир, 1980г) По сигналу початку переміщення напруга, що відповідає величині крока мікропереміщення по координаті "У" надходить на інтегратор 112 Інтегратор 112 забезпечує - Безударне переміщення повзуна 35 - Зростання його вихідної напруги до величини, що відповідає кроку мікропереміщення, за один і той же час, який визначається постійною часу інтегратора - ЗОВНІШНІМ сигналом інтегратор 112 може переводитись в режим пам'яті для зупинки повзуна в режимі зовнішньої синхронізації (Ялишев А У "Многофункциональные регулирующие устройства автоматики", М , Машиностроение 1981г) Комутатор 113 інтегратора підключає до інтегратора 112 в залежності від напрямку переміщення п'єзостовп 78 штовхача 74 прямого хода або п'єзостовп 79 штовхача 75 зворотного хода Імпульси з першого дюдного обмежувача 96 надходять також на запуск четвертого мультивібратора 114 з одним сталим станом, який генерує прямокутні імпульси, тривалість яких регулюються, їх передній фронт співпадає з переднім фронтом мультивібратора 97, а їх тривалість менше тривалості імпульсів мультивібратора 97 на час спрацювання електромагнітів 85 і 86 ( Ф і г в . і ї ш ) Це пояснюється тим, що задній фронт імпульсів 114 визначає момент часу прикріплення одного із штовхачів 74 або 75, виконуючого роль утримуючого до диска 84 на час відкріплення другого з них від 16 15 58986 диска 84 (переміщуючого штовхача) і його підтягустовпа 78 і коректуючого конденсатора 128 комування до плеча обертання гвинта 47 татор 134 відкриває ключ 130 Для підключення двох дисків і коректуючого конденсатора 129 комуІмпульси мультивібратора 114 дифетатор 134 відкриває ключ 131 і ключ 132 ренціюються п'ятим диференціюючим ланцюжком 115 Негативні імпульси з його виходу надходять Для підключення усіх трьох, у даному прина вхід п'ятого дюдного обмежувача 116, а з вихокладі, дисків до інтегратора 112 комутатор 134 ду в якості сигналу ZK|H, злічення кінцевої величини відкриває ключі 132 і 133 Управління комутатором зазору під датчиком 58 величини ЛІНІЙНОГО пере134 здійснюється другим обчислювачем 108 міщення надходить в другий обчислювач 108 і на Блок 34 ідентифікації точок корекції положення тригер 107 прикріплення утримуючого штовхача нижньої точки шліфувального круга по координаті По сигналу ZKIH злічування кінцевої величини зазо"У" включає вимірювачі 135 і 136 величин зазорів ру другий обчислювач 108 опитує вимірювач 117 під датчиками 90 і 91 ідентифікації точок корекції, величини крока мікропереміщення нижньої точки алгебраїчний суматор 137, пороговий пристрій по координаті "У" 138, підсилювач 139, диференціюючий ланцюжок 140, очікуючий блокінг-генератор 141, лічильник Прямокутний імпульс з виходу тригера 107 142 номера точок корекції і не відрізняється від (Фіг 8,UIO7) надходить на другий підсилювач поблока 11 ідентифікації точок корекції положення тужності 118 і через комутатор 100 на обмотку нижньої точки шліфувального круга по координаті електромагніта 85 при зворотному переміщенні "X" З виходу другого диференціюючого ланцюжка 102 продиференційовані імпульси мультивібратоТригер 143 блокировки переключення штовхара 97 надходять в ланцюг формування сигналу ча прямого хода забезпечує постійне прикріплення установки в "ноль" інтегратора 112 і формування штовхача прямого хода при реалізації алгоритму величини чергового крока мікропереміщення, який переміщення нижньої точки шліфувального круга включає шостий дюдний обмежувач 119, п'ятий по координаті "У" при малих приростах цієї коормультивібратор 120 з одним сталим станом, шосдинати, менших встановленого порогового знатий диференціюючий ланцюжок 121 і сьомий дюдчення ний обмежувач 122 Для підвищення жорсткості повзуна 35 у газоП'ятий мультивібратор 120 генерує прямокутні вому шарі плоских аеростатичних опор в двох імпульси (Фіг8,ІІі2о) передній фронт яких співпасуміжних стінках, наприклад, 40 і 42 (Фіг 4) корпуса дає з заднім фронтом імпульсу першого мультиві38 повзуна можуть бути установлені, наприклад, братора 97, а їх тривалість не менше більшого із по чотири регулятори 144 величини зміщення почасу відпускання електромагнітів 85, 86 і 62 3 вивзуна 35 в газовому шарі плоских аеростатичних ходу сьомого дюдного обмежувача 122 імпульси, опор 45, які включають корпус 145 ролика, в якому які відповідають задньому фронту імпульсів п'ятоустановлений ролик 146 Величину зміщення грані го мультивібратора 120 і часу відкріплення переповзуна 35 роликами 146 задають регулювальниміщуючого штовхача, надходять в другий обчисми гвинтами 147, укрученими у стояки 148 гвинта лювач 108 в якості сигналу установки в "ноль" На кресленнях позначена шпиндельна опора інтегратора 112 і перетворення коду величини 149, пристрій 150 суміщення нижньої точки чергового крока мікропереміщення нижньої точки шліфувального круга з віссю обертання вала по координаті "У" в напругу, яка відповідає велишпиндельної опори і диференціальний гвинт 151 чині цього крока мікропереміщення, зміщення шліфувального круга по осі Zi (Фіг 1) Для одноразового переміщення нижньої точки Причому, датчик 9 ідентифікації точок ко(режим роботи "крок") до першого диференціююрекції з'єднаний з вимірювачем 13 величини зазочого ланцюжка 95 замість задаючого мультивібрару, датчик 10 ідентифікації точок корекції з'єднатора 93 перемикачем 94 "безперервно - крок" підний з вимірювачем 12 величини зазору, вимірювач ключається схема управління разовим 12 величини зазору з'єднаний з першим входом мікропереміщенням, яка включає кнопку 123 алгебраїчного суматора 14, вимірювач 13 величи"цикл", тригер 124 управління схемою "І" 125, шосни зазору з'єднаний з другим входом алгебраїчнотий мультивібратор 126 завдання цикла з одним го суматора 14, вихід алгебраїчного суматора 14 сталим станом, джерело 127 перемикаючої напруз'єднаний з входом порогового пристрою 15, а йоги го вихід з'єднаний з входом підсилювача 16, вихід підсилювача 16 з'єднаний з входом диференціююКоректуючий конденсатор 128 забезпечує рівчого ланцюжка 17, а його вихід з'єднаний з входом ність постійної часу Тді одного диска п'єзостовпа очікуючого блокінг-генератора 18, вихід очікуючого 78 штовхача 74 прямого хода ПОСТІЙНІЙ часу Т п с блокінг-генератора 18 з'єднаний з першим входом усього п'єзостовпа, якщо до інтегратора 112 підлічильника 19 номера точок корекції і з четвертим ключається один диск п'єзостовпа 78 входом першого обчислювача 20, а його другий Коректуючий конденсатор 129 забезпечує ріввхід з'єднаний з четвертим виходом першого обність постійної часу Т92 двох дисків п'єзостовпа 78 числювача 20, джерело 22 постійної напруги через штовхача 74 прямого хода ПОСТІЙНІЙ часуТ п с усьокнопку 21 з'єднано з третім входом лічильника 19 го п'єзостовпа 78, якщо до інтегратора 112 підклюномера точок корекції і з третім входом лічильника чаються два диска п'єзостовпа 78 142 номера точок корекції, перший вихід пристрою Комутація дисків п'єзостовпа 78 і коректуючих 7 управління переміщенням рухомого елемента конденсаторів 128 і 129 здійснюється ключами лінійної напрямної з'єднаний з третім входом пер130, 131, 132, 133 Управління ключами 130-133 шого обчислювача 20, другий вихід з'єднаний з здійснюється комутатором 134 ключів Для піддругим входом першого обчислювача 20, третій ключення до комутатора 112 одного диска п'єзо 17 58986 вихід з'єднаний з першим входом комутатора 100 електромагнітів і з першим входом штовхача 5 прямого хода, четвертий вихід через перемикач 98 "зовнішня синхронізація - внутрішня синхронізація" з'єднаний з другим входом комутатора 100 електромагнітів і з першим входом штовхача 6 зворотного хода, п'ятий вихід через перемикач 98 "зовнішня синхронізація - внутрішня синхронізація" з'єднаний з десятим входом другого обчислювача 108, сьомий вихід з'єднаний з другим входом штовхача 5 прямого хода, восьмий вихід з'єднаний з другим входом штовхача 6 зворотного хода, дев'ятий вихід з'єднаний з першим входом схеми "І" ЗО, десятий вихід з'єднаний з дванадцятим входом другого обчислювача 108, перший вхід пристрою 7 управління переміщенням рухомого елемента лінійної напрямної з'єднаний з виходом штовхача 5 прямого хода, другий вхід з'єднаний з виходом штовхача 6 зворотного хода, третій вхід з'єднаний з третім виходом першого обчислювача 20, четвертий вхід з'єднаний з п'ятим виходом першого обчислювача 20, п'ятий вхід з'єднаний з виходом очікуючого блокінг-генератора 31 зупинки, шостий вхід з'єднаний з виходом ключа 25, джерело 26 живлення задаючого мультивібратора пристрою 7 управління переміщенням з'єднано з першим входом ключа 25, вихід тригера 24 включення живлення з'єднаний з другим входом ключа 25, перший вихід першого обчислювача 20 з'єднаний з входом блокінг-генератора 31 зупинки і через перемикач 98 "зовнішня синхронізація - внутрішня синхронізація" з'єднаний з першим входом другого обчислювача 108 і з входом інтегратора 112, другий вихід з'єднаний з нульовим входом тригера 29 зупинки, шостий вихід з'єднаний з одиничним входом тригера 24 включення живлення, сьомий вихід з'єднаний з восьмим входом другого обчислювача 108, дев'ятий вихід з'єднаний з шостим входом другого обчислювача 108, десятий вихід з'єднаний з п'ятим входом другого обчислювача 108, п'ятий вхід першого обчислювача 20 з'єднаний з п'ятим виходом другого обчислювача 108, джерело 28 постійної напруги через кнопку 27 "пуск" з'єднано з одиничним входом тригера 24 включення живлення, одиничний вихід тригера 29 зупинки з'єднаний з другим входом схеми "І" ЗО, вихід схеми "І" ЗО з'єднаний з одиничним входом тригера 29 зупинки і з нульовим входом тригера 24 включення живлення, датчик 90 ідентифікації точок корекції положення нижньої точки шліфувального круга по координаті "У" з'єднаний з вимірювачем 136 величини зазору, а його вихід з'єднаний з першим входом алгебраїчного суматора 137, датчик 91 ідентифікації точок корекції положення нижньої точки шліфувального круга по координаті "У" з'єднаний з вимірювачем 135 величини зазору, а його вихід з'єднаний з другим входом алгебраїчного суматора 137, вихід алгебраїчного суматора 137 з'єднаний з входом порогового пристрою 138, а його вихід з'єднаний з входом підсилювача 139, вихід підсилювача 139 з'єднаний з входом диференціюючого ланцюжка 140, а його вихід з'єднаний з вводом очікуючого блокінг-генератора 141, вихід очікуючого блокінг-генератора 141 з'єднаний з першим входом лічильника 142 і з третім входом другого обчислювача 108, другий вхід лічильника 18 142 з'єднаний з четвертим виходом другого обчислювача 108, вихід лічильника 142 з'єднаний з четвертим входом другого обчислювача 108, датчик 58 величини ЛІНІЙНОГО переміщення з'єднаний з вимірювачем 117 величини крока мікропереміщення нижньої точки шліфувального круга по координаті "У, а його вихід з'єднаний з другим входом другого обчислювача 108, третій вихід другого обчислювача 108 з'єднаний з входом комутатора 134 ключів, перший вихід комутатора 134 ключів з'єднаний з сигнальним входом ключа 133, ключ 133 з'єднаний з дисками п'єзостовпа 78, другий вихід комутатора 134 ключів з'єднаний з сигнальним входом ключа 131, ключ 131 з'єднаний з п'єзостовпом 78 і коректуючим конденсатором 129, третій вихід комутатора 134 ключів з'єднаний з сигнальним входом ключа 130, а ключ 131 з'єднаний з п'єзостовпом 78, коректуючим конденсатором 128 і з ключем 131, четвертий вихід комутатора 134 ключів з'єднаний з сигнальним входом ключа 132, ключ 132 з'єднаний з дисками п'єзостовпа 78, другий вихід другого обчислювача 108 з'єднаний з входом інтегратора 112, а його вихід з'єднаний з входом комутатора 113 інтегратора, вдходи комутатора 113 інтегратора з'єднані з п'єзостовпом 78 штовхача прямого хода і з п'єзостовпом 79 штовхача зворотного хода, перший вихід другого обчислювача 108 з'єднаний з нульовим входом тригера 143 блокировки переключення штовхача прямого хода, а його шостий вихід з'єднаний з одиничним входом тригера 143 блокировки переключення штовхача прямого хода, одиничний вихід тригера блокировки переключення штовхача прямого хода через перемикач 98 "зовнішня синхронізації - внутрішня синхронізація" з'єднаний з входом першого підсилювача 99 потужності, вихід першого підсилювача 99 потужності з'єднаний з входом комутатора 100 електромагнітів і з входом ключа 101, виходи комутатора 100 електромагнітів з'єднані з електромагнітом 85 штовхача прямого хода, з електромагнітом 86 штовхача зворотного хода і з сигнальним входом ключа 101, вихід ключа 101 з'єднаний з електромагнітом 62 фіксації напрямної, задаючий мультивібратор 93 через перемикач 94 "безперервно крок" в положенні "безперервно" з'єднаний з входом першого диференціюючого ланцюжка 95, а його вихід з'єднаний з входом першого дюдного обмежувача 96, вихід першого дюдного обмежувача 96 з'єднаний з входом першого мультивібратора 97 з одним сталим станом і з входом четвертого мультивібратора 114 з одним сталим станом, вихід першого мультивібратора 97 з одним сталим станом через перемикач 98 "зовнішня синхронізація - внутрішня синхронізація" в положенні "внутрішня синхронізація" з'єднаний з входом першого підсилювача 99 потужності і з входом другого диференціюючого ланцюжка 102, вихід четвертого мультивібратора 114 з одним сталим станом з'єднанні з п'ятим диференціюючим ланцюжком 115, а його вихід з'єднаний з входом п'ятого дюдного обмежувача 116, вихід п'ятого дюдного обмежувача 116 через перемикач "зовнішня синхронізація внутрішня синхронізація" в положенні "внутрішня синхронізація" з'єднаний з першим входом другого обчислювача 108 і з входом тригера 107 прикріп 19 лення утримуючого штовхача, вихід тригера 107 прикріплення утримуючого штовхача з'єднаний з входом другого підсилювача 118 потужності, а його вихід з'єднаний з входом комутатора 100 електромагнітів, вихід другого диференціюючого ланцюжка 102 з'єднаний з входом шостого дюдного обмежувача 119 і з входом другого дюдного обмежувача 103, а його вихід з'єднаний з входом другого мультивібратора 104 з одним сталим станом, вихід другого мультивібратора 104 з одним сталим станом з'єднаний з входом третього диференціюючого ланцюжка 105, а його вихід з'єднаний з входом третього дюдного обмежувача 106, вихід третього дюдного обмежувача 106 з'єднаний з входом тригера 107 прикріплення утримуючого штовхача і з входом третього мультивібратора 109 з одним сталим станом, вихід третього мультивібратора 109 з одним сталим станом з'єднаний з входом четвертого диференціюючого ланцюжка 110, а його вихід з'єднаний з входом четвертого дюдного обмежувача 111, вихід четвертого дюдного обмежувача 111 через перемикач 98 "зовнішня синхронізація - внутрішня синхронізація" в положенні "внутрішня синхронізація" з'єднаний з десятим входом другого обчислювача 108, вихід шостого дюдного обмежувача 119 з'єднаний з входом п'ятого мультивібратора 120 з одним сталим станом, а його вихід з'єднаний з входом шостого диференціюючого ланцюжка 121, а його вихід з'єднаний з входом сьомого дюдного обмежувача 122, вихід сьомого дюдного обмежувача 122 з'єднаний з одинадцятим входом другого обчислювача 108, джерело 127 переключаючої напруги через кнопку 123 "пуск" з'єднано з першим входом схеми " І " 125 і з одиничним входом тригера 124 управління схемою "І", а його вихід з'єднаний з другим входом схеми " І " 125, вихід схеми " І " 125 з'єднаний з входом шостого мультивібратора 126 з одним сталим станом, а його вихід з'єднаний з нульовим входом тригера 124 управління схемою " І " і через перемикач "безперервно - крок" в положенні "крок" з'єднаний з входом першого диференціюючого ланцюжка 95, датчик 68 величини ЛІНІЙНОГО переміщення з'єднаний з блоком 72 стабілізації осьового положення гвинта переміщення повзуна, а його вихід з'єднаний з регуляторами 69 тиску газу Спосіб переміщення нижньої точки шліфувального круга з дугоподібною шліфуючою поверхнею включає наступну ПОСЛІДОВНІСТЬ ДІЙ 1 Вимірюють і оцінюють відстані між точкою відліку початку першого інтервалу корекції і першою точкою корекції, а також відстані між двома суміжними точками корекції положення нижньої точки шліфувального круга по координаті "X" розрахункової траєкторії и переміщення на величину накопиченої погрішності положення на інтервалі переміщення нижньої точки по координаті "X", який дорівнює відстані між точкою відліку першого інтервалу корекції і першою точкою корекції, а також на інтервалах переміщення нижньої точки по цій координаті, які дорівнюють відстаням між кожними двома суміжними точками корекції Для вимірювання і оцінки величини першого інтервалу корекції зміщують рухомий елемент 4 лінійної напрямної 3, 4 і установлюють центр основи датчика 9 ідентифікації точок корекції поло 58986 20 ження нижньої точки шліфувального круга по координаті "X" над точкою відліку першого інтервалу корекції Установлюють крок "т" мікропереміщення рухомого елемента 4 лінійної напрямної п'єзоелектричним двигуном 5, 6, 7 Виконують пуск підпрограми першого обчислювача 20 "Розмір першого інтервалу корекції І" і включають п'єзоелектричний двигун в режимі безперервного крокового переміщення рухомого елемента 4 лінійної напрямної По сигналу закінчення кожного j-ro крока мікропереміщення перший обчислювач 20 у ВІДПОВІДНОСТІ з підпрограмою, що реалізується, "п" разів злічує з вимірювача крока мікропереміщення рухомого елемента 4 двійковий код величини крока мікропереміщення Оцінюється величина J-ГО крока мікропереміщення Розраховується величина х-| (j) переміщення рухомого елемента 4 за " j " кроків мікропереміщень де £ ] ( J - 1 ) - оцінка величини переміщення рухомого елемента 4 за Q-1) крок мікропереміщень ЛІНІЙНИМ дискретним фільтром Калмана (Сэйдж Э , Меле Дж "Теория оценивания и ее применение в связи и управлении", М , Связь, 1976 г ) , - асимптотично незміщена n=1 оцінка j-ro крока мікропереміщення О н н и м я з т р а " ф і и j л м " к ь у р т ю о р т к о і м ь о в м К ц і а і н к р л м к о у £ п а е н р ] ( е j м в ) і щ е е л н и ь ч Л и І н Н и І п Й Н И М е р е д м и і с щ к е р е н т а Особливістю застосування оптимального ЛІНІЙНОГО дискретного фільтра Калмана для отримання оцінок величин переміщень нижньої точки шліфувального круга по координаті "X" є наступне Так як кожне мікропереміщення рухомого елемента лінійної напрямної 3, 4 виконується п'єзоелектричним двигуном 5, 6, 7 з постійним кроком і за один і той же час руху рухомого елемента 4 в смислі оцінки величини його переміщення ЛІНІЙНИМ дискретним фільтром Калмана еквівалентний рівномірному прямолінійному руху Тоді модель руху рухомого елемента 4 в нерухомій системі координат Х0У (Фіг 2) описується диференціальним рівнянням dx' = 0 (2) dt: Вектор стану лінійної динамічної системи, який відповідає прийнятій моделі руху (2) має вигляд х т =|х,х| (3) Модель руху рухомого елемента 4 в просторі станів представляється у вигляді Х=Хі, X = Х2 (4) Уведемо масштаб часу такий, щоб кожний крок мікропереміщення рухомого елемента 4 виконувався за одиницю часу (t K p =1) Це дозволяє трактувати вимірювання j-ro крока мікропереміщення як вимірювання швидкості його переміщення, тобто компоненти хгО) вектора стану динамічної системи з дисперсією шуму Vv2(j), що дорівнює дисперсії шуму вимірювача крока " т " 58986 22 21 мікропереміщення рухомого елемента 4 на j-му ОбЧИСЛеННЯ ВХОДНОГО Ш у м у ПО КОМПОНеНТІ Х2 кроці мікропереміщення вектора стану виконується в наступній ПОВ задачі, що вирішується, компонента xi(j) СЛІДОВНОСТІ вектора стану не вимірюється, а формується у 1 Рухомий елемент 4 із вихідного положення ВІДПОВІДНОСТІ з (1) Принятому способу формуванпереміщується на N кроків з кроком мікроперня компоненти вектора xi(j) стану динамічної сисеміщення " т " Після закінчення кожного j-ro крока теми, що не вимірюється, на j-му кроці фільтрації мікропереміщення "к" разів вимірюється величина (оцінювання) відповідає дисперсія Vvi(j) похибки крока m (n, к) мікропереміщення і обчислюється вимірювання цієї компоненти, яка дорівнює сумі його асимптотично незміщена оцінка пі /п/ апостеріорної дисперсії Vx-] (j -1) похибки оцінювання компоненти хі вектора стану за Q-1) кроків мікропереміщення рухомого елемента і дисперсії Vv2(j) похибки вимірювання j-ro крока мікропереміщення VV10)=VX0-1)+VV20) (5) Матриця дисперсії Vv(j) шуму вимірювання по компонентам вектора стану динамічної системи має вигляд Vv(j) = (6) 0 Аналіз фізичної сутності задачі, що вирішується, (висока точність переміщення рухомого елемента на крок мікропереміщення, висока точність вимірювання крока мікро переміщення) дозволяє вважати шум вимірювання стаціонарними Середньоквадратична погрішність а в и м вимірювача крока мікропереміщення відома Тоді Vv2(j)=a B l 1 M = const, а апостеріорну дисперсію VX-|(J-1) отримують в процесі фільтрації Як відомо, дисперсію Vw вхідного шуму отримують із аналізу фізичної сутності задачі, що вирішується, або шляхом безпосереднього вимірювання з розумною точністю Як відмічалося раніше, в задачі, що вирішується, приріст компоненти хі вектора стану на j-му кроці мікропереміщення дорівнює компоненті хг(|) вектора стану Нехай дисперсія Vw2(j) входного шума по компоненті Х вектора стану, що вимірюється, відома 2 (алгоритм обчислення дисперсії Vw2(j) буде наведений нижче) Так як компонента xi(j) вектора стану, що не вимірюється, на j-му кроці мікропереміщення формується у ВІДПОВІДНОСТІ з (1), дисперсія Vwi(j) вхідного шуму по компоненті хі дорівнює сумі апостеріорної дисперсії Vx-] (j -1) похибки фільтрації цієї компоненти після переміщення рухомого елемента 4 на Q-1) кроків мікропереміщень і дисперсії вхідного шуму по компоненті Х2 вектора стану VW1(J)=VXIG-1)+VW 2 (7) Матриця дисперсії входного шуму по компонентам вектора стану динамічної системи має вигляд Vw(j) = (I-1)+VWO О 0 Vw2 (8) Висока точність переміщення рухомого елемента 4 лінійної напрямної на величину дискрети мікропереміщення "т" і висока стабільність швидкості цього переміщення дозволяють (Зважати вхідний шум стаціонарним, тобто Vw(j)=const (9) к=1 2 Обчислюється середнє значення Д величини крока мікропереміщення по N спостереженням п) (10) п=1 З Рухомий елемент 4 установлюється в вихідне положення і повторно переміщається на N кроків з тим же кроком мікропереміщення " т " На кожному кроці мікропереміщення обчислюється його асимптотично незміщена оцінка пі /п/ Обчислюється дисперсія вхідного шуму по компоненті Х2 вектора стану (11) n=1 Фільтрація (оцінювання вектора стану лінійної динамічної системи) здійснюється в наступній послідовності 1 Задаються початкові умови Шр)= М-(р) = 0 , Vx(0) = 0 у даному прикладі реалізації фільтра Калмана 2 Обчислюється апріорна дисперсія похибки фільтрації 3 Обчислюється коефіцієнт підсилення фільтра 4 Обчислюється оцінка вектора стану f(j) 5 Обчислюється апостеріорна дисперсія похибки фільтрації В результаті отримують оцінку £\{\) величини переміщення рухомого елемента 4 за " j " кроків мікропереміщень В момент часу досягнення центром основи датчика 9 ідентифікації точок корекції першої точки корекції в перший обчислювач 20 надходить сигнал "точка корекції", а вміст лічильника 19 номера точок корекції становиться рівним двом (Ліч =2) По цьому сигналу перший обчислювач 20 "п" разів опитує вимірювач крока мікропереміщення п'єзоелектричного двигуна 5, 6, 7 і одночасно видає на п'єзоелектричний двигун сигнал зупинки Розраховується асимптотично незміщена оцінка величини останнього крока мікропереміщення У ВІДПОВІДНОСТІ з підпрограмою "Розмір першого інтервалу корекції І" розраховується і запам'ятовується розмір першого інтервалу корекції І « ( 1 ) = ^ О ) + Д ^ ' (12) де Д ^ ; - асимптотично незміщена оцінка величини крока мікропереміщення рухомого елемен 23 58986 24 та 4 в момент часу досягнення центром основи на і одночасна на п'єзоелектричний двигун видатчика 9 ідентифікації точок корекції першої точки дається сигнал зупинки корекції положення нижньої точки шліфувального У ВІДПОВІДНОСТІ з підпрограмою "Розмір другого круга по координаті "X" інтервалу корекції І" розраховується і запам'ятовується розмір другого інтервалу корекції N-1 разів рухомий елемент 4 повертають у вихідне положення і установлюють центр основи датчика 9 ідентифікації точок корекції над точкою відліку першого інтервалу корекції Виконують пуск де Д1| ; - асимптотично незміщена оцінка вепідпрограм "Розмір першого інтервалу корекції 2", личини крока мікропереміщення рухомого елемен, "Розмір першого інтервалу корекції N 3 кроком та 4 в момент часу досягнений центром основи "т" мікропереміщення переміщують рухомий еледатчика 9 другої точки корекції мент 4 на величину першого штервала корекції В Як і при вимірюванні першого інтервалу корезультаті в пам'яті першого обчислювача 20 буде рекції рухомий елемент 4 N-1 раз повертають у сформований N-мірний масив розмірів першого вихідне положення і установлюють центр основи інтервалу корекції датчика 9 над першою точкою корекції Виконують Н (1), h (Z), Н (J), , Н (N) (Id) пуски підпрограм "Розмір другого інтервалу кокожний елемент якого відповідає отриманому рекції 2", , "Розмір другого інтервалу корекції N" виміру першого інтервалу корекції на n-му проході 3 кроком мікропереміщення "т" рухомий елемент центра основа датчика 9 ідентифікації точок ко4 переміщують на величину другого інтервалу корекції від точки відліку першого інтервалу корекції рекції В результаті в пам'яті першого обчислювадо першої точки корекції ча 20 буде сформований масив розмірів другого Виконують пуск підпрограми "Розмір першого інтервалу корекції штервала корекції" Розраховується асимптотично І2М(1), І2М(2), І2(х|(3), , I2(X|(N), незміщена оцінка величини першого інтервалу кожний елемент якого відповідає вимірюванню корекції положення нижньої точки по координаті другого інтервалу корекції на n-му проході центра "X" основи датчика 9 від першої точки корекції до другої Виконують пуск підпрограми "Розмір другого х) х) ^ =-|-]Гіі (п) (14) інтервалу корекції" Розраховується асимптотично п=1 незміщена оцінка другого інтервалу корекції і запам'ятовується в якості першого елемента масиву розмірів інтервалів корекції по координаті # 0 J W "X" Додаткова оцінка величини інтервалу корекції і запам'ятовується в якості другого елемента у ВІДПОВІДНОСТІ з (14) зменшує похибку оцінювання масиву інтервалів корекції величини інтервалу корекції фільтром Калмана, Послідовно отримують оцінки розмірів яка може виникати із-за нестабільності вхідного інтервалів корекції положення нижньої точки шуму і шуму вимірювання шліфувального круга по координаті "X" Впам'яті Зміщують рухомий елемент 4 лінійної напрямпершого обчислювача 20 буде сформований маної і установлюють центр основи датчика 9 іденсив розмірів інтервалів корекції тифікації точок корекції над першою точкою корекФ) €(*) €(*) €(*) и «І ції Виконують пуск підпрограми "Розмір другого інтервалу корекції І" і включають п'єзоелектричний 2 Установлюється функціональна залежність двигун в режимі безперервного крокового переміж величиною напруги Un на диски 78 штовхача міщення рухомого елемента 4 По сигналу за74 прямого хода і величиною переміщення нижкінчення кожного j-ro крока мікропереміщення друньої точки шліфувального круга по координаті "У" гий обчислювач 20 у ВІДПОВІДНОСТІ З реалізуємою при подачі напруги на всі ng дисків п'єзостовпа 78 підпрограмою "п" разів злічує з вимірювача крока штовхача 74 прямого хода, ng-1 диск п'єзостовпа мікропереміщення п'єзоелектричного двигуна 5, 6, 78 ng-2 ДИСКІВ, , один диск п'єзостовпа 78 штов7 цифровий двійковий код m Q, n) величини j-ro хача 74 прямого хода пристрою 32 крокового пекрока мікропереміщення рухомого елемента 4 реміщення нижньої точки шліфувального круга по Розраховується асимптотично незміщена оцінка координаті "У" розрахункової траєкторії ni(j) j-ro крока мікропереміщення Розраховується Нехай максимальний приріст координати "У" величина хі(|) величини переміщення рухомого нижньої точки шліфувального круга, який забезпечує штовхач 74 прямого хода при подачі на його п'єзостовп 78 максимальної Unmax експоненціальної напруги, що генерує інтегратор 112, на ng п'єзостовпа 78 штовхача 74 прямого хода ЛІНІЙНИМ дискретним фільтром Калмана АУн т max На кожному кроці мікропереміщення В момент часу досягнення центром основи плеча 76 обертання гвинта 47 переміщення повзудатчика 9 ідентифікації точок корекції другої точки на 35 пристрою 32 крокового переміщення нижньої корекції положення нижньої точки по координаті точки по координаті "У" зупинка переміщення ниж"X" в другий обчислювач 20 надходить сигнал ньої точки відбувається в момент часу, коли на"точка корекції" По цьому сигналу, як і на першому пруга на виході інтегратора 112, що відповідає інтервалі корекції, "п" разів опитується вимірювач заданій величині мікропереміщення, становиться крока мікропереміщення п'єзоелектричного двигурівною ВХІДНІЙ напрузі інтегратора 112, яка надхое л г о м е м у м е у ю н і т ь т н а т о е ц 4 р і з в н а к л у а " у к £ ] j " о ( к р j е ) р к о ц к і і в в ї е м у л и і В ч к І и р Д н П и о О п е В І ц р Д ь е Н о м О г С о і Т щ е І н ь ( З п е р п 1 ) е о д і м і щ е р у т о р и н н я 58986 26 25 дить з другого обчислювача 108 Отже для того, міщення нижньої точки шліфувального круга по н а координаті "У" для наступних інтервалів приросту щоб визначити величину Ду Н ттах п'єзостовп цієї координати 78 штовхача 74 прямого хода подають напругу ( ) ( ) U =Unrnax, З ВеЛИЧИНу ДУнттах ЗЛІЧуЮТЬ З n вимірювача 117 крока переміщення нижньої точки по координаті "У" пристрою 33 управління переміщенням нижньої точки шліфувального круга по координаті "У" Визначається величина переміщення нижньої точки по координаті "У" при подачі Unmax на n g -1, ng-2, пд-3, , один диск п'єзостовпа 78 штовхача 74 п 1 / А д" ДУнтК-1]=-^ ДУнттах, 'g пп - 2 'HTK-2J = пп - к = Дунт(1)= •'g пп - к ^нгтах_ n g Використання мінімального числа дисків п'єзостовпа 78 для переміщення нижньої точки на величину приросту ДУнт 0) координати "У" забезпечує максимум відношення сигнал/шум на виході пристрою 2 переміщення нижньої точки по координаті "У" Мінімальне число дисків визначається з нерівності ДУнт (ng ~ к ) > ДУнт 0 ) ^ ДУнт [ng ~ ( K + i)J 0^) Напруга подається на (пд-к) ДИСКІВ п'єзостовпа 78 штовхача 74 прямого хода Будуються функціональні залежності між напругою на диски п'єзостовпа 78 і величиною пере ДУнт (n g = 2 ) > Д У н т (j)> ДУнт К = і) 0 9 ) Побудову цієї функціональної залежності розглянемо на прикладі інтервалу приросту Д У н т ( п д - к ) > Л У н т О ) ^ Д У н т [ п д - ( к + і)] ЯКЩО величина приросту належить цьому інтервалу, напруга U n подається на (пд-к) ДИСКІВ п'єзостовпа 78 Функціональну залежність U n = f ( A y H T ( j ) ) задамо ортогональним поліномом Чебишева п-го ступеня Для цього, наприклад, на інтервалі приростів Д у н т ( п д - к ) > Д у н т О Ь д у н т [ п д - ( к + і)] беруть п+1 рівнодискретних точок Нехай = у (20) п Тоді рівнодискретні точки на цьому інтервалі приймають значення ДУнтК-к], ДУнт(пд-к)-2у, ДУнт l n g " K J - y . , Д у н т ( п д - к ) - п у (21) Подають напругу на (пд-к) ДИСКІВ п'єзостовпа 78 штовхача 74 прямого хода і послідовно нижній точці шліфувального круга задають прирости з (21) Величина приросту координати "У" нижньої точки злічується з вимірювача 117 крока переміщення по цій координаті Отримані виміри складають таблицю 1 Таблиця 1 Un Un(1) Un(2) Un(3) Un(n+1) ДУнтО) ДУнт(Пд-к) ДУнт(Пд-к)-ї ДУнт(Пд-к)-2у ДУнт(Пд-к)-Пу Ортогональний поліном Чєбишева, який наближує виміри, що складають таблицю 1, має вигляд (Гутер Р С "Элементы численного анализа и математической обработки результатов опыта", М,1962г) 2 U n ( n g - K ) = f 0 + f , A y H T ( n g - K ) + f 2 ду н т (п д -к)+ + f n Ду[! т (п д -к) Поліноми Чєбишева будуються для кожного інтервалу приростів, число яких відповідає числу дисків п'єзостовпа 78 штовхача 74 прямого хода Un(ng)=a0+a1 Дунт(пд)+а2 Ду н 2 (пд)+ + а п Д у ^ т (n g ) Un(n g -i)=b 0 + b, Ду н т (п д -1)+Ь 2 д у 2 т ( п д - і ) + + b n Ду[! т (п д -1) U n k - 2 ) = c o + c1 Д у н т ( п а - 2 ) + с 2 Ду2 т (п а -2)+ + с п Ду^ т (п а -2) т ,(22) Ітак, переміщення нижньої точки шліфувального круга 37 по координаті "У" мінімальним чис лом дисків п'єзостовпа 78 штовхача 74 прямого хода забезпечує підвищення відношення сигнал/шум на виході пристрою 2 переміщення нижньої точки по координаті "У" Необхідність підвищення відношення сигнал/шум на виході пристрою 2 обумовлена наступним При шліфуванні, наприклад, випуклого сферичного дзеркала величина приросту ДУнт 0) лежить в діапазоні 0п) мікропереміщення нижньої точки по коконденсатори 128 і 129, які забезпечують виконанординаті "У", розраховується асимптотично незміня цієї умови щена оцінка A ^ H T ( j ) величини кожного крока мікВ момент часу закінчення j-ro крока мікроперопереміщення реміщення розраховується величина хі (|) пере35 нт міщення нижньої точки по координаті "X" за j кроків м н і и к м р о п е р е ф і л ь т м р і о щ м е н К ь і а л м о а ц н і а н ю є О т т ь р с и я м Л у ю І т Н ь І Й о Н И ц і д М н к у и с £ к ] р H е T ( т J ) величини цього переміщення "п" разів вимірюється величина Ay H T (j,n) j-ro крока мікропереміщення нижньої точки по координаті "У" і розраховується його асимптотично незміщена оцінка А^ Н т 0) Розраховується величина переміщення нижньої точки по координаті "У" за "j" кроків мікропереміщень Динамічні властивості п'єзостовпа відповідають одноємнісному фільтру з передаточною функцією аперіодичної ланки першого порядку Нехай тривалість крока мікропереміщення нижньої точки шліфувального круга по координаті "X" рівна t m = At, де At - рівно або більше періоду обертання вала шпиндельної опори Напруга Un(j) на п'єзостовп зростає по закону U n (j)=U I H T (t) 1-е (44) де Тп о - постійна часу п'єзостовпа, UIHT (t) - вихідна напруга інтегратора В результаті на j-му кроці мікропереміщення координата "У" нижньої точки повинна отримати приріст Ду н т 0) я к и и зростає по екопоненціальному закону Для того, щоб відпрацювання величини приросту Ду н т (j) співпадало з моментом часу закінчення j-ro крока мікропереміщення по координаті "X", тобто переміщення нижньої точки по обом координатам виконувалось синхронно, постійна часу інтегратора Т, і постійна часу п'єзостовпа 78 штовхача 74 прямого хода підбираються такими, щоб напруга Un(j) досягала свого розрахункового значення в момент часу закінчення крока мікропереміщення нижньої точки по координаті "X", 9 В процесі шліфування при переміщенні нижньої точки шліфувального круга на величину першого q=1 інтервалу корекції за j=r кроків мікропереміщень по координаті "X" розраховується величина корекції положення нижньої точки по координаті "У" на j+1 крок мікропереміщення Величина переміщення нижньої точки по ко п=1 Розраховується дійсний приріст координати "У" нижньої точки на першому інтервалі корекції г і величина відхилення нижньої точки шліфувального круга по координаті "У" від розрахункової траєкторії на першому інтервалі корекції ЛУв,дх(Р = 1) = Л У н т М ) - Л У н т д ( Р = 1) (48) Коректується величина приросту Ду н т (г +1) координати "У" нижньої точки на j=r+1 крок мікропереміщення по розрахунковій траєкторії Ay^ T o p (r + i) = Ay H T (r + i ) + A y B l f l X ( q = i) (49) На j=r+1 кроці мікропереміщення нижньої точки по координаті "X" координаті "У" нижньої точки задають приріст ДунКт°р (г + і) і запобігають накопиченню погрішності положення нижньої точки на розрахунковій траєкторії 10 В процесі шліфування в момент часу закінчення останнього j=q r крока мікропереміщення кожного q-ro інтервалу корекції положення нижньої точки на розрахунковій траєкторії розраховується оцінка величини ^ т (q) переміщення нижньої точки по координаті "X" на момент часу закінчення q-ro інтервалу корекції і розраховується координата "У" нижньої точки шліфувального круга на момент часу закінчення j=q-r крока мікропереміщення q -го інтервалу корекції (50) і розраховується величина еталонного приросту координати "У"нижньої точки на q-му інтервалі корекції як різниця між розрахунковим значенням координати "У" нижньої точки, яка відповідає попередній точці корекції, и положення на розрахунковій траєкторії і розрахованим значенням координати "У" нижньої точки на момент часу закінчення j=q • г крока q-ro інтервалу корекції [ ] (51) 58986 38 37 Так як і на першому інтервалі корекції при пеСигнал на п'єзостовп 78 штовхача 74 прямого хода збільшується на величину, яка відповідає реміщенні нижньої точки по q -му інтервалу корекції в момент часу закінчення кожного j-ro крока приросту Ау^ т (qr + 2) Перевіряється виконання мікропереміщення "п" разів вимірюється величина нерівності Ду^ т (qr + 2) > у Якщо нерівність викокрока Ay H T (j,n) мікропереміщення нижньої точки нується, в момент часу закінчення (qr+2) крока по координаті "У" і розраховується асимптотично мікропереміщення "п" разів вимірюється і незміщена оцінка A ^ H T ( j ) величини кожного j-ro оцінюється величина приросту координати "У" кроку мікропереміщення у ВІДПОВІДНОСТІ з (47) нижньої точки A^H T (qr + 2) Розраховується велиРозраховується дійсний приріст координати чина еталонного приросту координати "У4 на (qr+1) "У" нижньої точки на q -му інтервалі корекції і (qr+2) кроках мікропереміщень як різниця між г розрахованим значенням координати "У", що відповідає попередній точці корекції и положення J1 = на розрахунковій траєкторії, і розрахованим знаі величина відхилення нижньої точки шліфуваченням координати "У" нижньої точки на момент льного круга по координаті "У" розрахункової траєчасу закінчення (qr+2) крока мікропереміщення кторії AyST(qr + 2) = AyHT(q)-[eo+Pi*iHT(qr + 2) + e2«12HT(qr + 2)+ +(3n£"HT (qr + 2)] А У В , Д Х ( Р ) = А У Н Т ( Р ) - А У Н Т Д ( Р ) (53) (56) і розраховується величина відхилення нижньої Коректується величина приросту Ду н т (q • г +1) точки від розрахункової траєкторії по координаті координати "У" нижньої точки на j=q-r+1 крок мікиуи ропереміщення по розрахунковій траєкторії Ду^ктор (qr +1) = Ду н т (q • г +1)+ ДУв-дх (q) (54) На j=qr+1 кроці мікропереміщення нижньої точки по координаті "X" координаті "У" нижньої точки К р т задають приріст Дун ° (qr + і) і запобігають накопиченню погрішності положення нижньої точки на розрахунковій траєкторії 11 Перед кожною корекцією положення нижньої точки на розрахунковій траєкторії скоректована величина приросту ДУнКт°р (q -г + 1) координати "У" нижньої точки порівнюється з пороговим значенням "у " приросту координати "У" нижньої точки шліфувального круга, яка, наприклад, може вибиратися на порядок більше шуму на виході пристрою 2 переміщення нижньої точки по координаті "У" при мінімальному розрахунковому значенні приросту цієї координати Якщо приріст АунКтор у не виконується, подальші дії полягають у наступному В момент часу закінчення (qr+2) крока мікропереміщення величина мікропереміщення нижньої точки по координаті "У" не вимірюється, напруга з п'єзостовпа 78 штовхача 74 прямого хода не знімається, а сам штовхач 74 від диска 84 не відкріплюється Напруга з електромагніта 62 фіксації напрямної 59 не знімається, тобто зазор під датчиком 58 не відновлюється З випередженням відносно початка j=qr+3 крока мікропереміщення злічується величина приросту Ду н т (qr + З) координати "У" Розраховується приріст координати "У" за три крока мікропереміщень АУ^т (qr + 3)= Ду^ т (qr+i)+Ay H T (qr + 2)+Ay H T (qr + 3) (59) і перевіряється виконання нерівності Ду^ т (qr + З) > у Якщо нерівність не виконується, продовжують виконувати дії по невиконанню цієї нерівності до того, поки перед початком j=qr+K крока мікропереміщення ця нерівність буде виконана Тоді В момент часу закінчення j=qr+K крока мікропереміщення "п" разів вимірюють і оцінюють величину Ду н т (к,п) переміщення нижньої точки шліфувального круга по координаті "У" за "к" кроків мікропереміщень 39 58986 М (60) n=1 Розраховується приріст еталонний т к ДУнт(ч + ) координати "У" нижньої точки на "к" кроках мікропереміщень і величину відхилення нижньої точки по координаті "У" на цьому відрізку траєкторії АУвідхfa1"+ к ) = А Ун т (q • г + к ) " А £н т ( к ) ( 6 1 ) Коректується величина приросту Д у н т (qr +к + 1) на j=qr+K+1 крок мікропереміщення Ay^ K ° p (qr + K + i ) = A y H T (qr + K + i)+Ду В І Д Х (qr + к) (62) Haj=qr+K+1 кроці мікропереміщення координати "У" нижньої точки задають приріст ЛУнКт°р (qr + к + 1), чим запобігають накопичення погрішності положення нижньої точки на розрахунковій траєкторії Перевіряють виконання нерівності Якщо нерівність не виконується, виконують дії по невиконанню цієї нерівності 12 В процесі переміщення нижньої точки шліфувального круга по розрахунковій траєкторії виконується корекція її положення (по координатам "X" і "У" розрахункової траєкторії) по точкам корекції положення нижньої точки шліфувального круга по координаті "X" траєкторії переміщення Таким чином, нижня точка шліфувального круга з установленим кроком мікропереміщення "т" із початкової точки розрахункової траєкторії переміщується по координаті "X" На кожному кроці мікропереміщення нижньої точки по координаті "X" вимірюється і оцінюється величина tf^(j) j-ro крока мікропереміщення, розраховується величина xi(j) переміщення нижньої точки по координаті "X" у ВІДПОВІДНОСТІ з (1) і виконується її оцінювання Л І НІЙНИМ дискретним фільтром Калмана (див п 1) В момент часу ідентифікації на черговому f -му кроці мікропереміщення точки відліку першого інтервалу корекції сигнал "точка корекції" установлює в одиницю (Ліч =1) лічильник 19 номера точки корекції по координаті "X" і надходить в перший обчислювач 20 По цьому сигналу (при показанні лічильника Ліч =1) перший обчислювач 20 "п" разів злічує з вимірювача величини крока мікропереміщення п'єзоелектричного двигуна 5, 6, 7 переміщення рухомого елемента 4 лінійної напрямної поточне значення Am(f) f-ro крока мікропереміщення і розраховує його оцінку Art1(f) Розраховується відстань по координаті "X" від початкової точки розрахункової траєкторії до точки відліку першого інтервалу корекції по координаті "X" хітв = £ i ( f - i ) + A r £ ( f ) (64) В силу близькості початкової точки розрахункової траєкторії і точки відліку першого інтервалу корекції по координаті "X", корекція положення нижньої точки в точці відліку не відбувається В момент часу ідентифікації першої точки корекції по координаті "X" (підходу першої точки ко 40 рекцм під центр основи датчика 9 ідентифікації точок корекції по координаті "X") на (f+Kj-му кроці мікропереміщення сигнал "точка корекції" надходить на лічильний вхід лічильника 19 номера точок корекції і в перший обчислювач 20 Обчислювач видає сигнал зупинки на п'єзоелектричний двигун 5, 6, 7 переміщення рухомого елемента 4 і штовхач 74 переміщення повзуна 35 пристрою 32 дискретного переміщення шліфувального круга по координаті "У" Розраховується відстань від початкової точки розрахункової траєкторії до першої точки корекції по координаті "X" Х Х 1нттк 1 ~ 1тв (65) Координата "X" нижньої точки шліфувального круга в точці зупинки приймається рівною х і Н Т т к і Розраховуються величини приростів координати "У" нижньої точки на кожній дискреті мікропереміщення нижньої точки по координаті "X" з кроком " т " відносно першої точки корекції ВІДЛІК номера крока мікропереміщення учиняється відносно першої точки корекції, тобто координати нижньої точки в точці зупинки переміщення вважаються координатами початкової точки розрахункової траєкторії Величина приросту координати "У" нижньої точки на 7-му кроці мікропереміщення розраховується у ВІДПОВІДНОСТІ З виразом j-mj + + Р п ( х і н т т к і + і - т ) п ] (66) При ідентифікації "гї'-оі точки корекції по координаті "X" розрахункової траєкторії координата "X" нижньої точки приймається рівною, Х 1нтткп - х 1 т в +ц +г2 + +\^ \рі) Розраховуються величини приростів ДУн т 0) координати "У" нижньої точки на дискретах мікропереміщення по координаті "X" відносно "п"оі точки корекції у ВІДПОВІДНОСТІ з (66) ВІДЛІК номе ра крока мікропереміщення по розрахунковій траєкторії учиняється відносно "п"-оі точки корекції На кожному j-му кроку переміщення нижньоїточки шліфувального круга по розрахунковій траєкторії, з кроком " т " по координаті "X", координаті "У" нижньої точки задають розрахункові прирости Ду н т 0) 3 (66) відносно "п"-оі точки корекції по координаті "X" 13 В процесі переміщення нижньої точки шліфувального круга по розрахунковій траєкторії виконується корекція її положення по координаті "У" по точкам корекції положення нижньої точки шліфувального круга по координаті "У" (між точками корекції по координаті "X") Для цього в момент часу ідентифікації на j-му кроці мікропереміщення чергової точки корекції положення нижньої точки шліфувального круга по координаті "У" з вимірювача 117 величини крока мікропереміщення нижньої точки по координаті "У" злічується і оцінюється поточне значення j-ro крока мікропереміщення 58986 42 41 по координаті "У", по номеру "п" точки корекції покоординати "У" нижньої точки на (j+1) крок мікроложення нижньої точки по координаті "У", зліченопереміщення ор го з лічильника 142 номера точок корекції, з пам'яті Ду^ т 0 + 1) = АУнТ0 + 1)+Ау В | Д Х Т к 1 (70) другого обчислювача 108 злічується відстань по На (|+1) кроці мікропереміщення координаті "У" координаті "У" від початкової точки розрахункової нижньої точки задають скоректований приріст траєкторії до "п"-оі точки корекції Розраховується К ор потрібна величина переміщення нижньої точки по ДУн т (j + 1) і установлюють нижню точку координаті "У" на момент часу ідентифікації "гї'-оі шліфувального круга в розрахункову точку точки корекції положення нижньої точки шліфуватраєкторії переміщення по координаті "У" льного круга по координаті "У" і розраховується Нехай в процесі подальшого переміщення нивеличина погрішності положення нижньої точки по жньої точки по розрахунковій траєкторії на f -му координаті "У" в "п"-ій точці корекції Коректується кроці мікропереміщення під центр основи датчика величина приросту Ду(| + 1) координати "У" ниж90 підійшла "п"-а точка корекції Сигнал "точка коньої точки на (j+1) крок мікропереміщення на верекції" надходить на лічильний вхід лічильника 142 личину погрішності положення На Q+1) кроку мікточок корекції і в другий обчислювач 108 Покаропереміщення нижня точка установлюється в зання лічильника 142 становиться рівним п+1 По розрахункову точку траєкторії переміщення по нерівності нулю показання лічильника з координаті "У" вимірювача 117 крока мікропереміщення І так, з моменту часу початку шліфування низлічується величина Ayfff (f) поточного значення жня точка шліфувального круга переміщується по f-ro крока мікропереміщення по координаті "У" і, як розрахунковій траєкторії Нехай початковій точці на першій точці корекції, розраховується потрібна розрахункової траєкторії відповідає таке положенвеличина переміщення нижньої точки на момент ня першої точки корекції, при якому вона знахочасу підходу "п"-оі точки корекції по координаті "У" диться перед центром основи датчика 90 ідентипід центр основи датчика 90 фікації точок корекції В момент часу підходу точки відліку першого У М = У 5 Ї Р ( М + Д У Й ( 0 (71) інтервалу корекції (четвертої точки корекції) під По номеру точки корекції злічується величина центр основи датчика 90 сигнал "точка корекції" переміщення нижньої точки по координаті "У" від установлює в одиницю лічильник 142 номера топочаткової точки розрахункової траєкторії до мочок корекції по координаті "У" менту часу ідентифікації "п"-оі точки корекції і розНехай на j-му кроці мікропереміщення по розраховується величина відхилення Ду В |дх ТКП н и ж ' рахунковій траєкторії під центр основи датчика 90 ньої точки від розрахункової траєкторії по підійшла перша точка корекції Сигнал "точка кокоординаті "У" на момент ідентифікації цієї точки рекції" надходить на лічильний вхід лічильника 142 корекції номера точок корекції і в другий обчислювач 108 Показання лічильника 142 становиться рівним ду =| (n)-v ( l ) Ґ721 двом (Ліч =2) По рівності Ліч =2 з вимірювача 117 "У відх т к п 'ткп V / Унт \' ^> крока мікропереміщення злічується величина Коректується величина приросту Ду н т (f +1) координати "У" нижньої точки на (f+1) крок мікроАУнт 0) поточного значення j-ro крока мікроперпереміщення еміщення По величині переміщення нижньої точки м по координаті "X" за Q-1) крок розраховується розрахункова величина переміщення нижньої точки Ун°зр(.|-1) по координаті "У" відносно початкової точки розрахункової траєкторії Розраховується потрібна величина переміщення нижньої точки на момент часу підходу першої точки корекції по координаті "У" під центр основи датчика 90 як сума розрахункової величини переміщення за Q-1) крок мікропереміщень по координаті"У" і виміряної величини поточного переміщення нижньої точки на j му кроці УРТ=У5Ї Р 0-І)+АУМ0) (68) По номеру точки корекції по координаті "У" злічується відстань 'тк і( п ) п о К 0 0 Р Д и н а т | "У" М | Ж початковою точкою розрахункової траєкторії і першою точкою корекції з (40) і розраховується величина відхилення А у в і д х т к 1 нижньої точки від потрібного значення по координаті "У" на момент часу ідентифікації першої точки корекції АУв,дхтк1=|Й1(п)-У?т (69) Коректується величина приросту Д у н т (і +1) Ay H K op T (f + i) = A y H T ( f ) + A y B l f l X T K n (73) На (f+1) кроці мікропереміщення координаті "У" нижньої точки задають скоректований приріст АУнКт°Р (f+ 1) ' установлюють нижню точку шліфувального круга в розрахункову точку переміщення по координаті "У" Нижню точку шліфувального круга переміщують по розрахунковій траєкторії і фіксують цю точку шліфувального круга в кінцевій точці розрахунковій траєкторії Робота пристрою переміщення нижньої точки шліфувального круга з дугоподібною шліфуючою поверхнею по розрахунковій траєкторії розглядається в такій ПОСЛІДОВНОСТІ - Вимірювання і оцінка величин інтервалів корекції положення нижньої точки шліфувального круга по координатам "X" і "У" траєкторії переміщення Побудова функціональних залежностей Un(n g )=f[Ay H T (j)] - Переміщення нижньої точки шліфувального круга по розрахунковій траєкторії 43 58986 1 Вимірювання і оцінка величин інтервалів корекції положення нижньої точки по координаті "X" траєкторії переміщення Для вимірювання і оцінки величин інтервалів корекції положення нижньої точки по координаті "X" нижня точка шліфувального круга 37 (Фіг1) суміщується з віссю обертання вала шпиндельної опори 148 Відносно ОСІ обертання вала "лиски" 8 ідентифікації точок відліку першого інтервалу корекції виконуються на такій відстані, точка відліку першого інтервалу корекції розташовується перед (по напрямку переміщення рухомого елемента 4 лінійної напрямної) центром основи датчика 9 ідентифікації точок корекції і на мінімальній відстані від нього Включається пристрій 1 переміщення нижньої точки шліфувального круга по координаті "X" розрахункової траєкторії (Фіг 2) Кнопкою 21 блока 11 ідентифікації точок корекції установлюється в "ноль" лічильник номера точок корекції В пристрої 7 управління переміщенням установлюється крок "т" мікропереміщення рухомого елемента 4 лінійної напрямної і переводять цей пристрій в режим безперервного крокового переміщення рухомого елемента 4 Виконується пуск підпрограми "Точка відліку першого інтервалу корекції "X"" першого обчислювача 20 Кнопкою 27 "пуск" блока 23 пуска і зупинки переміщення нижньої точки установлюється в одиничний стан тригер 24 включення живлення Високим потенціалом з одиничного виходу тригера 24 включення живлення відкривається ключ 25 Джерело 26 живлення задаючого мультивібратора блока 7 управління переміщенням підключається до задаючого мультивібратора Рухомий елемент 4 переміщується п'єзоелектричним двигуном 5, 6, 7 з установленим кроком мікропереміщення " т " Вихідна напруга вимірювачів 12 і 13 величин зазорів по сигналам датчиків 9 і 10 ідентифікації точок корекції безперервно надходить на суматор 14, а з його виходу - на вхід порогового пристрою 15 В момент часу підходу точки відліку першого інтервалу корекції по координаті "X" під центр основи датчика 9 вихідна напруга суматора 14 перевищує величину порога пристрою 15 і через підсилювач 16 надходить на вхід диференціюючого ланцюжка 17 Короткий позитивний імпульс, передній фронт якого відповідає моменту часу підходу точки відліку першого інтервалу корекції під центр основи датчика 9 ідентифікації точок корекції, надходить на запуск очікуючого блокінг-генератора 18 Вихідний імпульс очікуючого блокінг-генератора 18 надходить на лічильний вхід лічильника 19 номера точок корекції і на перший вхід першого обчислювача 20 в якості сигнала "точка корекції" Показання лічильника 19 становиться рівним одиниці (Ліч =1) У ВІДПОВІДНОСТІ з підпрограмою, що реалізується, з першого вихода першого обчислювача 20 на вхід очікуючого блокінг-генератора 31 зупинки надходить сигнал миттєвої зупинки Імпульс очікуючого блокінг-генератора 31 зупинки перевищує порог порогового пристрою 7 управління переміщенням, який відповідає максимальному кроку мікропереміщення рухомого елемента 4 п'єзоелектричним двигуном 5, 6, 7 Переміщення рухомого елемента 44 4 переривається Точка відліку першого інтервалу корекції фіксується під центром основи датчика 9 ідентифікації точок корекції Крім того, з другого виходу першого обчислювача 20 на нульовий вхід тригера 29 зупинки надходить сигнал зупинки і установлює його в нульовий стан Низький потенціал з одиничного виходу тригера 29 зупинки надходить на вхід схеми " І " ЗО, на другий вхід якої з затримкою відносно сигнала зупинки надходить низький потенціал з пристрою 7 управління переміщенням рухомого елемента 4, який відповідає часу закінчення максимального крока мікропереміщення рухомого елемента 4 Напруга з виходу схеми " І " ЗО повертає тригер 29 зупинки в одиничний стан і установлює тригер 24 включення живлення в нульовий стан Ключ 25 закривається і відключає джерело 26 живлення від задаючого мультивібратора пристрою 7 управління переміщенням Черговий пуск п'єзоелектричного двигуна може бути виконаний натисканням кнопки 27 "пуск" або сигналом першого обчислювача 20 на одиничний вхід тригера 24 включення живлення Виконується пуск підпрограми "Розмір першого інтервалу корекції "X" І" першого обчислювача 20 і кнопкою 27 "пуск" включається п'єзоелектричний двигун 5, 6, 7 Рухомий елемент 4 переміщується з тим же кроком мікропереміщення " т " В момент часу закінчення кожного j-ro крока мікропереміщення з блока 7 управління мікропереміщенням на другий вхід першого обчислювача 20 "кінець крока мікропереміщення" По цьому сигналу сигналами опитування з третього виходу першого обчислювача 20 з аналогоцифрового перетворювача величини крока мікропереміщення блока 7 управління переміщенням на третій вхід першого обчислювача 20 "п" разів злічується код m(|,n) j-ro крока мікропереміщення Обчислюється його асимптотично незміщена оцінка tf^(j) Розраховується величина xi(j) переміщення рухомого елемента 4 за " j " кроків мікропереміщень у ВІДПОВІДНОСТІ з (1) і виконується її оцінювання оптимальним ЛІНІЙНИМ дискретним фільтром Калмана В момент часу підходу першої точки корекції під центр основи датчика 9 імпульс очікуючого блокінг-генератора 18 в якості сигналу "точка корекції" надходить на перший вхід першого обчислювача 20 і на лічильний вхід лічильника 19 номера точок корекції Вміст лічильника 10 становиться рівним двом (Ліч =2) По цьому сигналу перший обчислювач 20 опитує лічильник 19 Код номера точки корекції надходить на четвертий вхід першого обчислювача 20 (номер точки корекції на одиницю менше показання лічильника 19) Одночасно з першого і другого виходів першого обчислювача 20 в блок 23 пуску і зупинки надходять сигнали миттєвої зупинки і зупинки рухомого елемента 4 Переміщення рухомого елемента 4 переривається Перша точка корекції фіксується під центром основи датчика 9 У ВІДПОВІДНОСТІ З підпрограмою "Розмір першого інтервалу корекції "X" 1" (при Ліч =2) сигналами опитування з третього виходу першого обчислювача 20 "п" разів опитується аналого-цифровий перетворювач величини крока мікропереміщення блока 7 управління 45 58986 Х переміщенням Коди Ді!| '(п) величини останнього крока мікропереміщення по першому інтервалу корекції надходять на третій вхід першого обчислювача 20 Обчислюється асимптотично незміщена оцінка величини Д ^ і величина Д і ' х ' (1) першого інтервалі корекції у ВІДПОВІДНОСТІ З (12) l!jX' (1) запам'ятовується в якості першого елемента масиву розмірів першого інтервалу корекції положення нижньої точки шліфувального круга по координаті "X" розрахункової траєкторії N-1 разів нижню точку шліфувального круга суміщають з віссю обертання вала шпиндельної опори 148, зміщують рухомий елемент 4 і установлюють центр основи датчика 9 над точкою відліку першого інтервалу корекції N-1 разів переміщують рухомий елемент 4 на величину першого інтервалу корекції для чого центр основи датчика 9 ідентифікації точок корекції установлюють над першою точкою корекції На кожному проході першого інтервалу корекції послідовно виконуються пуски підпрограм "Розмір першого інтервалу корекції "X" 2", , "Розмір першого інтервалу корекції "X"" По наведеній вище схемі в пам'яті першого обчислювача 20 буде сформований N-мірний масив (13) розмірів першого інтервалу корекції Виконується пуск підпрограми "Розмір першого інтервалу корекції "X"" У ВІДПОВІДНОСТІ з алгоритмом роботи підпрограми розраховується асимптотично незміщена оцінка 1 р ' величини першого інтервалу корекції положення нижньої точки шліфувального круга по координаті "X" розрахункової траєкторії у ВІДПОВІДНОСТІ з (14) і запам'ятовується в якості першого елемента масиву розмірів інтервалів корекції Робота пристрою 1 переміщення нижньої точки по координаті "X" по визначенню другого і дальших інтервалів корекції не відрізняється від описаної вище В результаті вимірювання і оцінювання f інтервалів корекції в пам'яті першого обчислювача 20 буде сформований f-мірний масив (16) розмірів інтервалів корекції положення нижньої точки шліфувального круга по координаті "X" 2 Побудова функціональних залежностей між величиною напруги на диски п'єзостовпа 78 штовхача 74 прямого хода і величиною переміщення нижньої точки шліфувального круга по координаті "У" розглядається на прикладі побудови цієї функціональної залежності U n (n g ) = f(Ду н т (j)) при подачі напруги U n на всі, наприклад, n g =3 дисків п'єзостовпа 78 46 134 ключів підключений ключ 132, до першого розряду - ключ 133, до другого розряду - ключ 13О, до третього розряду- ключ 131 В результаті ключі 130 і 131 залишаються закритими, а коректуючі конденсатори 128 і 129 залишаються відключеними від дисків п'єзостовпа 78 Відкриваються ключі 132 і 133 Усі ДИСКИ п'єзостовпа 78 через комутатор 113 інтегратора підключаються до виходу інтегратора 112 На електромагніт 85 штовхача 74 прямого хода і на електромагніт 62 фіксації напрямної 59 пристрою 52 вимірювання крока мікропереміщення нижньої точки подається напруга від зовнішнього джерела живлення Напрямна 59, а отже і датчик 58 величини ЛІНІЙНОГО переміщення будуть зафіксовані, а штовхач 74 прямого хода прикріпиться до диска 84 Подають тиск піддува в аеростатичний підп'ятник 67 і в пневмоциліндри 51 Для вибраної КІЛЬКОСТІ точок апроксимації розраховується дискрета у приросту Д у н т ( n g j у ВІДПОВІДНОСТІ з (20) Виконується пуск підпрограми "Переміщення "У"" У другий обчислювач 108 уводиться мінімальний код на перетворювач код напруга пристрою зв'язку другого обчислювача 108 з ЗОВНІШНІМИ функціональними елементами У ВІДПОВІДНОСТІ з підпрограмою "Переміщення "У"" уведений код перетворюється у напругу U n на п'єзостовп 78 штовхача 74 і з другого виходу другого обчислювача 108 надходить на вхід інтегратора 112, а з його виходу через комутатор 113 на "п" дисків п'єзотовпа 78 Під датчиком 58 пристрою 52, вимірювання крока мікропереміщення нижньої точки установиться зазор, рівний величині переміщення повзуна 35 Другий обчислювач 108 перетворює вихідну напругу вимірювача 117 величини крока мікропереміщення нижньої точки по координаті "У" в цифровий двійковий код і відображає величину переміщення на екрані дисплея Підвищують код на перетворювач код - напруга пристрою зв'язку другого обчислювача 108 з ЗОВНІШНІМИ функціональними елементами і виконують пуски підпрограми "Переміщення "У"" Методом послідовних наближень переміщують повзун 35 на величину Д у н т m a x ( n g ) - ny (див, +апДу[]т(пд) таблицю №1) Виконується пуск підпрограми "Запис" другого обчислювача 108 Коди U n (n+1) і Д у н т т а х ( п д - п у ) надходять в пам'ять другого обчислювача 108 в якості двох перших елементів масиву, які складають таблицю №1 Збільшують код на перетворювач код - напруга і виконуючі пуски підпрограми "Переміщення "У"" методом послідовних наближень повзуну 35 задають переміщення Д У н т т а х ( п д ) - ( п - ' О ВИКОНУЄТЬСЯ ПуСК (78) Для побудови цієї функціональної залежності комутатором 113 інтегратора до інтегратора 112 підключається п'єзостовп 78 штовхача 74 прямого хода В другий обчислювач 108 уводиться код 0011 і виконується пуск підпрограми " Комутація ключів" У ВІДПОВІДНОСТІ З алгоритмом роботи підпрограми код 0011 з третього виходу другого обчислювача 108 надходить в комутатор 134 ключів До нульового розряду регістра комутатора програмр "Запис" Коди U n (n) і А У н т т а х ( п д ) - ( п - 1 ) у надходять в пам'ять другого обчислювача 108 в якості чергових елементів масиву, що складають таблицю №1 Послідовно отримують усі елементи таблиці № 1 , закінчуючі елементами U n (1) і Д у Н т max(ng)> Я К І відповідають максимальній напрузі на виході перетворювача код - напруга пристрою зв'язку з ЗОВНІШНІМИ функціональними елементами другого обчислю ип(пд)=ао+а1Дунт(пд)+а2ДУнт(пд)+ 47 вача 108 "Функціональна Виконується залежність 58986 пуск підпрограми U n ( n g ) = f ( A y H T ( n g))" Розраховуються і запам'ятовуються коефіцієнти ао, а-і, аг, , а п ортогонального полінома Чєбишева з(78) По наведеній схемі розраховуються коефіцієнти усіх ПОЛІНОМІВ Чєбишева із (22) З Вимірювання і оцінювання величин інтервалів корекції положення нижньої точки шліфувального круга по координаті "У" розрахункової траєкторії Розглянемо вимірювання і оцінювання величини першого інтервалу корекції положення нижньої точки по координаті "У" Для цього повзун 35 попередньо установлюється у крайнє верхнє положения В другий обчислювач 108 уводиться величина крока мікропереміщення "п" нижньої точки шліфувального круга по координаті "У" і виконується пуск підпрограми "Напруга переміщення" У ВІДПОВІДНОСТІ з цією підпрограмою визначається мінімальна КІЛЬКІСТЬ ДИСКІВ п'єзостовпа 78, що за безпечує переміщення нижньої точки з кроком " т Г у ВІДПОВІДНОСТІ з (18) і розраховується величина напруги U n на ці диски для переміщення нижньої точки з кроком " т і " у ВІДПОВІДНОСТІ з (22) З другого обчислювача 108 в комутатор 134 ключів надходить код, який забезпечує потрібну комутацію коректуючих конденсаторів 128 і 129 і дисків п'єзостовпа 78 штовхача 74 Комутатор 100 електромагнітів установлюється в положення "пряме переміщення" В результаті до першого підсилювача 99 потужності буде підключений електромагніт 85 штовхача 74 прямого хода і через ключ 101 електромагніт 62 фіксації напрямної 59, а до другого підсилювача 118 потужності буде підключений електромагніт 86 штовхача 75 зворотного хода, який при прямому переміщенні повзуна 35 виконує роль утримуючого штовхача Комутатор 113 інтегратора також установлюється в положення "пряме переміщення" В результаті до інтегратора 112 підключається п'єзостовп 78 штовхача 74, який виконує роль перемішуючого штовхача Перемикач 98 "зовнішня синхронізація - внутрішня синхронізація" установлюється в положення "внутрішня синхронізація" Перемикач "безперервно - крок " установлюється в положення "крок" Виконується пуск підпрограми "Початок відліку першого інтервалу корекції "У"" Перемикач "безперервно - крок" установлюється в положення "безперервно" і підключають задаючий мультивібратор 93 до входа першого диференціюючого ланцюжка 95 Повзун 35 переміщується у прямому напрямку При ПІДХОДІ точки відліку першого інтервалу корекції під центр основи датчика 90 ідентифікації точок корекції імпульс очікуючого блокінг-генератора 141 установлює в одиницю (Ліч =1) лічильник 142 номера точок корекції і надходить в другий обчислювач 108 в якості сигналу "точка корекції" У ВІДПОВІДНОСТІ З підпрограмою, що реалізується, другий обчислювач 108 злічує вміст лічильника 142 і видає на інтегратор 112 сигнал зупинки 48 Перемикач "безперервно - крок" установлюють в положення "крок" Виконується пуск підпрограми "Розмір першого інтервалу корекції "У" І" Перемикач "безперервно - крок" установлюють в положення "безперервно" Задаючий мультивібратор 93 підключає твоя до входу першого диференціюючого ланцюжка 95 Штовхач 74 прямого хода прикріплюється до диска 84 Після прикріплення штовхача 74 з виходу четвертого диференціюючого ланцюжка 111 в другий обчислювач 108 надходить сигнал "початок переміщення" По цьому сигналу з другого обчислювача 108 напруга U n надходить на вхід інтегратора 112, а з нього через комутатор 113 інтегратора на диски п'єзостовпа 78 штовхача 74 Повзун 35 переміститься на величину установленого крока мікропереміщення " т Г Після закінчення переміщення повзуна 35 з виходу п'ятого диференціюючого ланцюжка 116 в другий обчислювач 108 надходить сигнал "злічення ZK|H" злічення кінцевої величини зазору під датчиком 58 крока мікропереміщення По цьому сигналу другий обчислювач 108 "п" разів злічує з вимірювача 117 крока мікропереміщення код mi(j, n) величини j-ro крока мікропереміщення і обчислює його асимптотично незміщену оцінку i ^ i ( j ) у ВІДПОВІДНОСТІ з (23) Розраховується величина переміщення нижньої точки на першому інтервалі корекції за " j " кроків мікропереміщень у ВІДПОВІДНОСТІ з (24) В момент часу підхода (на першому обороті гвинта 47 переміщення повзуна 35) під центр основи датчика 90 ідентифікації точок корекції першої точка корекції імпульс очікуючого блокінггенератора 141 надходить на лічильний вхід лічильника 142 номера точок корекції і на четвертий вхід другого обчислювача 108 в якості сигналу "точка корекції" По цьому сигналу другий обчислювач 108 видає сигнал зупинки на інтегратор 112, злічує показання лічильника 142 (Ліч =2) і "п" разів злічує код з вимірювача 117 крока мікропереміщення Розраховується асимптотично незміщена оцінка еміщення величини останнього крока мікроперпо ВІДПОВІДНОСТІ першому з (25) інтервалу корекції Розраховується і у за пам'ятовується величина першого інтервалу корекції Д ^ положення нижньої точки по координаті "У" на першому проході у ВІДПОВІДНОСТІ З (26) N-1 разів повторюється вимірювання першого інтервалу корекції у ВІДПОВІДНОСТІ З підпрограмами "Розмір першого інтервалу корекції "У" 2", , "Розмір другого інтервалу корекції "У" N" В результаті в пам'яті другого обчислювача 108 сформується N-мірний масив (27) розмірів першого інтервалу корекції Виконується пуск підпрограми "Розмір першого інтервалу корекції "У"" Розраховується асимптотично незміщена оцінка 1 р ' величини першого інтервалу корекції у ВІДПОВІДНОСТІ з (28) і запам'ятовується в якості першого елемента масиву розмірів інтервалів корекції По наведеній вище схемі отримують оцінки р = 4 • п - інтервалів корекції В результаті в 49 58986 пам'яті другого обчислювача 108 буде сформований масив (31) оцінок інтервалів корекції положення нижньої точки шліфувального круга по координаті "У" 4 Для кожної J-OI дискрети переміщення нижньої точки по координаті "X" розраховуються прирости Д у н т 0) координати "У" нижньої точки В другий обчислювач 108 уводяться - Величина крока " т " мікропереміщення нижньої точки по координаті "X" -Коефіцієнти Р 0 . Р 1 . Р 2 . . Рп полінома (32), яким задана обгинаюча тіла обертання криволінійного перерізу - Радіус RTina обертання Виконується пуск підпрограма "Прирости Д у н т ( | ) " Д Р У Г 0 Г 0 обчислювача 108 В пам'яті другого обчислювача 108 буде сформований масив приростів Д у н т (j) у ВІДПОВІДНОСТІ s W/ 5 Нижня точка шліфувального круга 37 суміщається з віссю обертання вала шпиндельної опори 148 і переміщується по осі обертання в крапне верхнє положення Для виконання цієї установки нижня точка шліфувального круга пристроєм 33 управління переміщенням нижньої точки по координаті "У" установлюється над пристроєм 149 суміщення нижньої точки шліфувального круга 37 з віссю обертання вала шпиндельної опори Переміщуючі шліфувальні круг по осям Хі і Zi системи координат ОІХ-ІУ-IZI (Фіг 1) за допомогою п'єзоелектричного двигуна 5, 6, 7 з диференціального гвинта 150, ВІДПОВІДНО, нижню точку шліфувального круга установлюють на ось обертання вала шпиндельної опори (див патент України "Пристрій суміщення нижньої точки шліфувального круга з дугоподібною шліфуючою поверхнею з віссю обертання вала шпиндельної опори" №36959 А від 16 04 2001 р , бюл 3) Для переміщення нижньої точки в крайнє верхнє положення комутатор 100 електромагнітів і комутатор 113 п'єзоштегратора пристрою 33 управління переміщенням установлюються в положення "зворотне переміщення" В кроковому або в безперервному кроковому режимі роботи пристрою 33 нижня точка шліфувального круга установлюється в крайнє верхнє положення 6 Нижня точка шліфувального круга 37 зміщується по осі "У " системи координат O-IX-IY-IZI і установлюється в початкову точку розрахункової траєкторії Вимірюється відстань між крайнім верхнім положенням нижньої точки і початковою точкою розрахункової траєкторії по координаті "У", а також відстані від початкової точки розрахункової траєкторії до розташованих перед нею точок корекції положення нижньої точки по координаті иуи Установка нижньої точки шліфувального круга в початкову точку розрахункової траєкторії - це зміщення її по осі "У-і" системи координат ОІХ-ІУ-IZI (по осі обертання вала) і установка глибини різання, що вимагається Для виконання цієї установки блок 33 управління переміщенням переводиться в автономний режим роботи перемикач 98 "зовнішня синхроні 50 зація - внутрішня синхронізація установлюється в режим роботи "внутрішня синхронізація" Комутатори 100 і 113 установлюються в режим роботи "пряме переміщення", перемикач 94 "безперервно - крок" установлюється в положення "крок" У другий обчислювач 108 уводиться величина " т Г крока мікропереміщення нижньої точки по координаті "У" По наведеній раніше методиці розраховується мінімальна КІЛЬКІСТЬ ДИСКІВ n g - дисків п'єзостовпа 78, що забезпечують переміщення нижньої точки з кроком " т Г і величина напруги U n на ці диски Виконується пуск підпрограми "Початкова установка" Перемикач 94 "безперервно - крок" установлюється в положення "безперервно" Нижня точка шліфувального круга переміщується по осі "У " з установленим кроком мікропереміщення " т Г У ВІДПОВІДНОСТІ з алгоритмом роботи підпрограми на кожному j-му кроці мікропереміщення по сигналу "злічення Z K IH", ЩО надходить у другий обчислювач 108 з п'ятого дюдного обмежувача 116, обчислювач 108 "п" разів опитує вимірювач 117 крока мікропереміщення Розраховується асимптотично незміщена оцінка i ^ i ( j ) j-ro крока мікропереміщення у ВІДПОВІДНОСТІ з (35) і обчислюється величина переміщення \^{ (j) за Q) кроків мікропереміщень у ВІДПОВІДНОСТІ з (36) При ПІДХОДІ на (|+к) кроці мікропереміщення по координаті "У" точки відліку першого інтервалу корекції (четвертої точки корекції) імпульс очікуючого блокінг-генератора 141 надходить на лічильний вхід лічильника 142 номера точок корекції і в другий обчислювач 108 в якості сигналу "точка корекції" Показання лічильника 142 становиться рівним одиниці (Ліч =1) Другий обчислювач 108 опитує лічильник 142, видає сигнал зупинки на інтегратор 112 і "п" разів опитує вимірювач 117 крока мікропереміщення По вимірюванням останнього крока мікропереміщення розраховується його асимптотично незміщена оцінка A ^ J + K) І ( п р и Л і ч = 1 ) розраховується величина переміщення Д І ^ нижньої точки із крайнього верхнього положення до моменту часу підходу точки відліку першого інтервалу корекції під центр основи датчика 90 ідентифікації точок корекції у ВІДПОВІДНОСТІ з (37) По наведеній вище схемі "п" разів вимірюється щ ' обчислюється оцінка щ Ц|Є| відстані Із точки відліку першого інтервалу корекції нижня точка переміщується по осі "УГ (Фіг 1), для чого перемикач "безперервно - крок", який після зупинки був установлений в положення "крок" установлюється в положення "безперервно" (переміщення в кроковому режимі здійснюється натиском кнопки 123 "пуск") У ВІДПОВІДНОСТІ з підпрограмою, що реалізується, виконується оцінювання кожного j-ro крока мікропереміщення і розраховується поточна величина переміщення нижньої точки відносно точки відліку першого інтервалу корекції Нехай в момент часу закінчення f-ro крока мікропереміщення (до підходу першої точки корекції під центр основи датчика 90 нижня точка шліфувального круга була установлена в початкову точку розрахункової 51 58986 траєкторії У другий обчислювач 108 уводиться команда "початкова точка розрахункової траєкторії" По цій команді розраховується величина переміщення по координаті "У" на інтервалі "точка відліку першого інтервалу корекції - початкова точка розрахункової траєкторії"" f І н т ( f ) = y ^ r t i i ( f ) , а також (при Ліч =1) відстань f=i Інтпоч між крайнім верхнім полонення нижньої точки шліфувального круга і початковою точкою розрахункової траєкторії у ВІДПОВІДНОСТІ з (39) Розраховуються і запам'ятовуються відстані від початкової точки розрахункової траєкторії до наступних точок корекції у ВІДПОВІДНОСТІ з (40) У тому випадку, якщо нижня точка установлюється в початкову точку розрахункової траєкторії після прохода к-оі точки корекції під центром основи датчика 90, розрахунок відстаней до (к+1)-оі і наступних точок корекції виконується по такій же схемі 7 Робота пристрою переміщення нижньої точки шліфувального круга по розрахунковій траєкторії в режимі "Шліфування" І так, нижня точка шліфувального круга 37 установлена в початкову точку розрахункової траєкторії Для переводу пристрою переміщення нижньої точки шліфувального круга в режим роботи "Шліфування" пристрій 33 управління переміщенням нижньої точки по координаті "У" переводиться в режим зовнішньої синхронізації, для чого перемикач 98 установлюється в положення "зовнішня синхронізація" В цьому режимі синхронізація роботи пристрою 33 управління переміщенням здійснюється сигналами пристрою 7 управління переміщенням рухомого елемента 4 лінійної напрямної і першого обчислювача 20 пристрою 1 переміщення нижньої точки шліфувального круга по координаті "X" розрахункової траєкторії Комутатор 100 електромагнітів і комутатор 113 інтегратора установлюються в положення "пряме переміщення" Виконується пуск підпрограми "Шліфування" другого обчислювача 108 Для перевода пристрою 1 переміщення нижньої точки шліфувального круга по координаті "X" в режим роботи "Шліфування" перемикачем режимів роботи пристрою 7 управління переміщенням рухомого елемента 4 лінійної напрямної пристрій 7 переводиться в режим роботи прямого безперервного крокового переміщення рухомого елемента 4 Виконується пуск підпрограми першого обчислювача 20 "Шліфування" У ВІДПОВІДНОСТІ З ЦІЄЮ підпрограмою в момент часу пуска з десятого виходу першого обчислювача 20 на одиничний вхід тригера 24 включення живлення надходить сигнал включення живлення задаючого мультивібратора пристрою 7 управління переміщенням Високий потенциал з одиничного виходу тригера 24 включення живлення відкриває ключ 25, який підключає джерело 25 живлення до задаючого мультивібратора пристрою 7 По сигналу "початок цикла" штовхач 5 прямого хода прикріплюється до основи 3 лінійної напрямної (напруга прикріплення 52 штовхача 5 надходить на нього з третього виходу пристрою 7 управління переміщенням) Одночасно напруга прикріплення штовхача 5 з третього виходу пристрою 7 надходить на комутатор 100 електромагнітів і ключ 1 0 1 , а з них на електромагніт 85 штовхача прямого хода і електромагніт 62 фіксації напрямної 59 пристрою 32 крокового переміщення нижньої точки шліфувального круга по координаті "У" Штовхач 74 прикріплюється до диска 84 пристрою 32 Сигнал "початок циклу" з шостого виходу пристрою 7 надходить в другий обчислювач 108 По цьому сигналу з пам'яті другого обчислювача 108 злічується приріст Д у н т 0) координати "У" нижньої точки По сигналу початок крока мікропереміщення, що виробляється в блоці 7 управління переміщенням, з сьомого виходу блока 7 в штовхач 5 надходить пилкоподібна напруга переміщення Нижня точка шліфувального круга починає переміщуватися по координаті "X" розрахункової траєкторії В момент часу початку переміщення рухомого елемента 4 сигнал "початок крока переміщення" з п'ятого виходу пристрою 7 надходить також в другий обчислювач 108 По цьому сигналу напруга U n , яка відповідає величині приросту Д у н т 0) ' розрахованій КІЛЬКОСТІ дисків п'єзостовпа 78 з другого виходу другого обчислювача 108 надходить на інтегратор 112, а з нього через комутатор 113 інтегратора надходить на диски п'єзостовпа 78 Одночасно по цьому же сигналу другий обчислювач 108 видає на комутатор 134 код комутації дисків п'єзостовпа 78 До комутатора 113 ключами 130, 1 3 1 , 132, 133 буде підключена відповідна КІЛЬКІСТЬ ДИСКІВ, а до дисків - ВІДПОВІДНІ коректуючі конденсатори 128, 129 Нижня точка шліфувального круга починає переміщуватися по координаті "У" розрахункової траєкторії В момент часу переміщення нижньої точки шліфувального круга по координаті "X" на величину крока " т " мікропереміщення в пристрої 7 управління переміщенням виробляється сигнал "кінець крока мікропереміщення" Напруга на сьомому виході пристрою 7 "заморожується", переміщення нижньої точки по координаті "X" припиняється Цей же сигнал з другого виходу пристрою 7 управління переміщенням надходить в другий обчислювач 20, через перемикач 98 "зовнішня синхронізації - внутрішня синхронізація" надходить на інтегратор 112 і переводить його в режим пам'яті, а також надходить в другий обчислювач 108 Переміщення нижньої точки шліфувального круга по координаті "У" припиняється (одночасно з зупинкою переміщення нижньої точки по координаті "X") По цьому сигналу перший обчислювач 20 сигналами з третього вихода "п" разів видає сигнал запуску аналого-цифрового перетворювача вихідної напруги вимірювача величини крока мікропереміщення пристрою 7 управління переміщенням, а сигналами з п'ятого виходу злічує коди j-ro крока мікропереміщення Коди m(j, n) величини j-ro крока мікропереміщення надходять на п'ятий вхід першого обчислювача 20 Розраховується асимпто 53 58986 54 тично незміщена оцінка tf^(j) j-ro крока мікропер інтервалі еміщення, розраховується величина х і н т (|) переміщення нижньої точки шліфувального круга по координаті "X" за Q) кроків мікропереміщень і виконується оцінювання величини цього переміщення ЛІНІЙНИМ дискретним фільтром Калмана По цьому сигналу другий обчислювач 108 також "п" разів перетворює вихідну напругу вимірювача 117 крока мікропереміщення нижньої точки по координаті "У" в цифровий двійковий код, розраховується асимптотично незміщена оцінка АУнтО) J"1"0 крока мікропереміщення і величина Унт (|) переміщення нижьої точки за "j" кроків мікропереміщень по координаті "У" ДУнт (я) З затримкою у часі відносно сигналу "кінець кроку мікропереміщення" в пристрої 7 управління переміщенням виробляється напруга прикріплення штовхача 6 зворотного хода, яка з його четвертого виходу надходить на штовхач 6 п'єзоелектричного двигуна 5, 6, 7 переміщення рухомого елемента 4 лінійної напрямної і на електромагніт 86 штовхача 75 зворотного хода пристрою 32 крокового переміщення нижньої точки по координаті "У" Штовхачі 6 і 75 зворотного хода прикріплюються до основи З і диска 84, ВІДПОВІДНО З затримкою відносно часу виробка сигналу "кінець крока мікропереміщення" пристрій 7 управління переміщенням знімає напругу прикріплення з штовхачів 5 і 74 прямого хода З затримкою на час відкріплення електромагнітів штовхачів 5 і 74 по сигналу "відкріплення" пристрій 7 управління переміщенням знімає напругу з п'єзостовпа штовхача 5 прямого хода Штовхач 5 підтягується до рухомого елемента 4 лінійної напрямної Сигнал "відкріплення" з десятого виходу пристрою 7 управління переміщенням надходить в другий обчислювач 108, який по цьому сигналу у ВІДПОВІДНОСТІ з підпрограмою, що реалізується, установлює в "ноль" інтегратор 112 П'єзостовп 78 скорочується і штовхач 74 підтягується до плеча 76 обертання гвинта 47 переміщення повзуна 35 По черговому сигналу "початок цикла" описаний цикл роботи пристрою повторюється В процесі обробки шліфуванням після переміщення нижньої точки на величину Q=r кроків чергового інтервалу корекції положення нижньої точки по координаті "У" коректується положення нижньої точки на розрахунковій траєкторії на j=q-r+1 крок мікропереміщення по розрахунковій траєкторії Для цього на кожному j = q - r кроці мікропереміщення по сигналу "кінець крока мікропереміщення" після вимірювання і оцінки j=q-r крока мікропереміщення нижньої точки по координаті "X", обчислення і оцінки £ ] H T ( J ) величини переміщення рухомого елемента 4 за j=q-r кроків мікропереміщень першим обчислювачем 20, обчислення дійсної величини переміщення y H T f l ( q ) нижньої т о в а в о і р ч к ч д д и е н м а є и н а 1 в а q 0 е т і 8 л м , и у п ч и X і р н и н п і п , розраховується т у е с е в р к р в а е а м п л і ч ю и і к щ е о , е р р е щ н ш н о величина к ц о я м і £ н у ї ] и д T H ж н о р ( ь б у J г и Т ) о ч ї и АУн Т (q) О т с м л о б Ч Н о ч к в а ч и в и ю ч О п і о 2 с і л д ю п о к о 0 еталонного приросту координати "У" нижньої точки на q-му корекції 3 у ВІДПОВІДНОСТІ З (51) Код сьомого виходу першого обчислювача і сигнал "корекції 1" з восьмого виходу цього обчислювача надходять на другий обчислювач 108, де розраховується величина відхилення A y B W < (q) нижньої точки по координаті "У" розрахункової траєкторії у ВІДПОВІДНОСТІ з (53) По сигналу "початок цикла", що q-r+1 кроку мікропереміщення нижньої розрахунковій траєкторії, коректується приросту А у н т (q • г +1) координати " У відповідає точки по величина на j=q • г+1 крок мікропереміщення у ВІДПОВІДНОСТІ з (54) При надходженні в другий обчислювач 108 сигнала "початок крока переміщення" (q-r+1 крока мікропереміщення) на інтегратор 112 надійде напруга, яка відповідає скоректованій ЛУнКт°р (q -г + 1) величині приросту координати "У" нижньої точки (і КІЛЬКОСТІ підключених дисків п'єзостовпа 78) Крім того, по сигналу "початок цикла" скоректована величина ЛУнКт°р (q • г +1) приросту координати "У" по рівнюється з пороговою величиною " у " приросту координати "У" Якщо Аун К т о р (q- г + і ) у , по сигналу "кінець крока мікропереміщення" вимірюється і оцінюється величина приросту координати "У" за два крока мікропереміщень По наведеній вище схемі розраховується скоректована величина приросту Ду скор q-r + З) координати "У" на j=q-r+3 крок мікропереміщення З затримкою у часі відносно сигналу "кінець крока мікропереміщення" на електромагніт 86 штовхача 75 зворотного хода надходить напруга прикріплення Штовхач 75 прикріплюється до диска 84 Одночасно в другий обчислювач 108 з десятого виходу пристрою 7 управління переміщенням надходить сигнал "відкріплення" По цьому сигналу другий обчислювач 108 установлює в "ноль" тригер 143 блокування переключення Штовхач 74 55 відкріпляється Другий обчислювач 108 також установлює в "ноль" інтегратор 112 П'єзостовп 78 скорочується і штовхач 74 підтягується до плеча 76 обертання гвинта 47 переміщення повзуна 35 На цьому закінчується черговий цикл мікропереміщення нижньої точки шліфувального круга по розрахунковій траєкторії У т о м у випадку, якщо поріг " у " величини приросту координати "У" буде досягнутий на "к" кроках мікропереміщень нижньої точки по координаті "У", пристрій працює по наведеній вище схемі Нехай положенню початкової точки розрахункової траєкторії по координаті "У" відповідає інтервал повороту гвинта 47 переміщення повзуна 35, що знаходиться між точкою відліку першого інтервалу корекції і першою точкою корекції Нехай в процесі шліфування на j-му кроці мікропереміщення по розрахунковій траєкторії під центр основи датчика 90 ідентифікації підійшла перша точка корекції Показання лічильника, яке рівне двом (Ліч =2) злічується у другий обчислювач 108 По сигналу "точка корекції" (при показанні лічильника Ліч =2) другий обчислювач 108 злічує з вимірювача 117 крока мікропереміщення поточне значення Am(j) величини j-ro крока мікропереміщення Розраховується величина переміщення нижньої точки по координаті "У" із початкової точки розрахункової траєкторії до підходу першої точки корекції під центр основи датчика 90 ідентифікації точок корекції у ВІДПОВІДНОСТІ з (68) При показанні лічильника Ліч -2 злічується відстань між початковою точкою розрахункової траєкторії і першою точкою корекції і розраховується величина А у в і д х т к 1 відхилення нижньої точки від розрахункової траєкторії по координаті "У" на момент часу ідентифікації першої точки корекції у ВІДПОВІДНОСТІ з (69) По сигналу "початок циклу", що відповідає початку (|+1) циклу переміщення нижньої точки по розрахунковій траєкторії, який надходить в другий обчислювач 108 з шостого виходу пристрою 7 управління переміщенням рухомого елемента 4 з пам'яті другого обчислювача 108 по номеру Q+1) крока мікропереміщення злічується приріст ДУнтО + і ) координати "У" нижньої точки на Q+1) кроці мікропереміщення і коректується у ВІДПОВІДНОСТІ з (70) При надходженні у другий обчислювач 108 з п'ятого виходу пристрою 7 управління переміщенням сигналу "початок крока переміщення" на вхід інтегратора 112 надходить напруга U n , яка відповідає скоректованому приросту Дун К т ° р (j + 1) координати "У" і КІЛЬКОСТІ підключених до інтегратора дисків п'єзостовпа 78 штовхача 74 прямого хода При ПІДХОДІ на f-му кроці мікропереміщення по розрахунковій траєкторії під центр основи датчика 90 ідентифікації точок корекції "п"-оі точки корекції, коректується положення нижньої точки шліфувального круга на (f+1) кроці мікропереміщення Корекція положення нижньої точки шліфувального круга на розрахунковій траєкторії переміщення (по координатам "X" і "У") по точкам корекції по координаті "X" виконується наступним 58986 56 чином По наведеній вище схемі на кожному кроці мікропереміщення нижньої точки по координаті "X" вимірюється і оцінюється величина m(|) j-ro крока мікропереміщення, розраховується величина переміщення Хі(|) нижньої точки за Q) кроків мікропереміщень у ВІДПОВІДНОСТІ з (1) і оцінюється ЛІНІЙНИМ дискретним фільтром Калмана В момент часу ідентифікації на черговому f-му кроці мікропереміщення точки відліку першого інтервалу корекції напруга на виході суматора 14 перевищує величину порога порогового пристрою 15 і надходить на підсилювач 16 Вихідна напруга підсилювача 16 диференціюється диференціюючим ланцюжком 17 Короткий позитивний імпульс з виходу диференціюючого ланцюжка 17, який відповідає моменту часу підходу точки відліку першого інтервалу корекції під центр основи датчика 9 ідентифікації точок корекції, запускає перший очікуючий блокінг-генератор 18, імпульс якого надходить на лічильний вхід лічильника 19 номера точок корекції і в якості сигналу "точка корекції" на перший вхід першого обчислювача 20 Показання лічильника становиться рівним одиниці (Ліч =1) По цьому сигналу (при Ліч =1) перший обчислювач 20 сигналом з його третього виходу запускає аналого-цифровий перетворювач крока мікропереміщення пристрою 7 управління переміщенням, а сигналом з його п'ятого виходу злічує код Am(f) поточного значення величини f-ro крока мікропереміщення Код Am(f) надходить на третій вхід першого обчислювача 20 При надходженні цього коду розраховується відстань х і т в від початкової точки розрахункової траєкторії до точки відліку першого інтервалу корекції у ВІДПОВІДНОСТІ З (64) В момент часу підходу на (f+к) кроці мікропереміщення під центр основи датчика 9 першої точки корекції імпульс першого блокінг-генератора 18 надходить на лічильний вхід лічильника 19 і на перший вхід першого обчислювача 20 в якості сигнала "точка корекції" Показання лічильника становиться рівним двом (Ліч -2) По сигналу "точка корекції" перший обчислювач 20 видає сигнал миттєвої зупинки (з першого виходу) на очікуючий блокінг-генератор 31 зупинки, в другий обчислювач 108 і установлює в режим пам'яті інтегратор 112 Імпульс очікуючого блокінг-генератора 31 зупинки надходить на п'ятий вхід пристрою 7 управління переміщенням По цьому сигналу "заморожується" напруга переміщення на п'єзостовп штовхача 5 прямого хода В результаті припиняється переміщення нижньої точки по розрахунковій траєкторії Крім того, перший обчислювач 20 видає (з другого виходу) сигнал зупинки на тригер 29 зупинки і установлює його в нульовий стан Низький потенціал з одиничного виходу тригера 29 зупинки надходить на вхід схеми " І " ЗО На другий вхід схеми " І " ЗО з дев'ятого виходу пристрою 7 управління переміщенням надходить сигнал, який відповідає максимальному кроку мікропереміщення рухомого елемента 4 В момент часу надходження цього сигналу вихідний сигнал схеми "І" ЗО установлює в нульовий стан тригер 24 включення живлення і повертає в одиничний стан тригер 29 зупинки Низьким потенціалом з одиничного 57 58986 виходу тригера 24 включення живлення закривається ключ 25 і відключає живлення від задаючого мультивібратора пристрою 7 управління переміщенням В результаті поновити переміщення нижньої точки шліфувального круга можливо тільки сигналом пуску з шостого виходу першого обчислювача 20 або натисканням кнопки 27 "пуск" З затримкою у часі відносно сигналу миттєвої зупинки другий обчислювач 108 установлює в "ноль" інтегратор 112 По сигналу "точка корекції" злічується і оцінюється поточне значення Am(f + к) (f+K)-ro кроку мікропереміщення і розраховується відстань х і н т т к і від початкової точки розрахункової траєкторії до першої точки корекції у ВІДПОВІДНОСТІ з (65) Координата "X" в точці зупинки приймається рівною х1нттк1=х1тв а положення нижньої точки в точці зупинки приймається в якості початкової точки розрахункової траєкторії У ВІДПОВІДНОСТІ з (66) розраховуються прирости Д у н т (j) відносно точки зупинки Прирости 58 Д у н т (j) відносно точки зупинки з десятого виходу першого обчислювача 20 і сигнал "корекція 2" з дев'ятого виходу першого обчислювача 20 надходять в другий обчислювач 108 З шостого виходу першого обчислювача 20 на тригер 24 включення живлення надходить сигнал "пуск" Нижня точка шліфувального круга продовжує переміщуватися по розрахунковій траєкторії до чергової точки корекції і на першому кроці мікропереміщення отримає приріст А у н т 0 ) В кожній наступній точці корекції положення нижньої точки по координаті "X" виконується корекція положення нижньої точки на розрахунковій траєкторії В момент часу переміщення нижньої точки шліфувального круга в кінцеву точку розрахункової траєкторії сигналами першого обчислювача 20 "миттєвий зупин" і "зупин" нижня точка шліфувального круга фіксується в кінцевій точці розрахункової траєкторії 59 58986 60
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for displacement of lower point of abrasive disk with bow-shaped abrasive surface to calculated trajectory
Автори англійськоюZinenko Volodymyr Mykolaiovych
Назва патенту російськоюСпособ перемещения нижней точки шлифовального круга с дугообразной шлифующей поверхностью по расчетной траектории
Автори російськоюЗиненко Владимир Николаевич
МПК / Мітки
МПК: B23B 5/00
Мітки: дугоподібною, поверхнею, нижньої, спосіб, точки, шліфуючою, розрахунковій, переміщення, траєкторії, шліфувального, круга
Код посилання
<a href="https://ua.patents.su/35-58986-sposib-peremishhennya-nizhno-tochki-shlifuvalnogo-kruga-z-dugopodibnoyu-shlifuyuchoyu-poverkhneyu-po-rozrakhunkovijj-traehktori.html" target="_blank" rel="follow" title="База патентів України">Спосіб переміщення нижньої точки шліфувального круга з дугоподібною шліфуючою поверхнею по розрахунковій траєкторії</a>
Пристрій суміщення нижньої точки шліфувального круга з дугоподібною шліфувальною поверхнею з віссю обертання вала шпиндельної опори
Номер патенту: 36959
Опубліковано: 16.04.2001
Автори: Зіненко Володимир Миколайович, Шепелєв Анатолій Олександрович
МПК: B23Q 17/00
Мітки: віссю, шліфувальною, круга, дугоподібною, поверхнею, суміщення, обертання, шліфувального, нижньої, шпиндельної, опори, вала, точки, пристрій
Текст:
...обмежувач 13 зворотного переміщення рухомої пластини 4. Обмежувач 13 зворотного переміщення призначений для обмеження величини переміщення ру 2 36959 хомої пластини 4 електромагнітом 14, зв'язаним з нею пружиною 15. Це обмежує величину деформації плоскої пружини 11, а отже, обмежує величину її залишкової деформації. Зміщення рухомої пластини 4 електромагнітом 14 необхідно для її відведення від п'єзоелемента 10. У результаті випрямлення...
Пристрій суміщення нижньої точки шліфувального круга з дугоподібною шліфувальною поверхнею з віссю обертання вала шпиндельного вузла
Номер патенту: 20907
Опубліковано: 07.10.1997
Автори: Зіненко Володимир Миколайович, Шепелев Анатолій Олександрович
МПК: B23Q 17/00
Мітки: шліфувального, вузла, шліфувальною, вала, обертання, точки, нижньої, пристрій, круга, суміщення, шпиндельного, віссю, дугоподібною, поверхнею
Формула / Реферат:
1. Устройство совмещения нижней точки шлифовального круга с дугообразной шлифующей поверхностью с осью вращения вала шпиндельного узла, содержащее устройство перемещения шлифовального круга и индикаторное устройство, отличающееся тем, что оно снабжено связанной с пьезоэлементом подвижной пластиной с закрепленной в центре ее верхней плоскости индикаторной иглой, кроме того устройство включает также блок коммутации и усилитель, причем...
Спосіб переміщення вершини різця по розрахунковій траєкторії та пристрій для його реалізації
Номер патенту: 52335
Опубліковано: 16.12.2002
Автор: Зіненко Володимир Миколайович
МПК: B23B 5/00
Мітки: траєкторії, пристрій, спосіб, реалізації, вершини, переміщення, різця, розрахунковій
Формула / Реферат:
1. Спосіб переміщення вершини різця по розрахунковій траєкторії, що включає установлення вершини різця в початкову точку розрахункової траєкторії, розрахунок приростів координати "У" вершини різця на дискретах розрахункової траєкторії, завдання на дискретах траєкторії переміщення вершини різця по координаті "X" розрахункових приростів координати "У" вершини різця, який відрізняється тим, що в процесі переміщення...
Спосіб обробки деталей криволінійного перерізу, симетричних відносно вісі обертання, шліфувальним кругом з дугоподібною шліфуючою поверхнею
Номер патенту: 20749
Опубліковано: 07.10.1997
Автори: Шепелев Анатолій Олександрович, Зіненко Володимир Миколайович
МПК: B24B 19/00, B23Q 15/007
Мітки: обробки, перерізу, поверхнею, дугоподібною, вісі, спосіб, кругом, деталей, відносної, симетричних, криволінійного, шліфувальним, обертання, шліфуючою
Формула / Реферат:
1. Способ обработки деталей криволинейного сечения симметричных относительно оси вращения шлифовальным кругом с дугообразной шлифу-ющей поверхностью, при котором строят траекторию перемещения шлифовального круга в системе координат XOY, детали и шлифовальному кругу сообщают вращательное движение, а шлифовальному кругу дополнительно - движение подачи в двух взаимно перпендикулярных направлениях по осям Х и Y системы координат XOY по...
Пристрій для правки шліфувального круга з переривчастою робочою поверхнею на електропровідній зв’язці
Номер патенту: 37973
Опубліковано: 15.05.2001
Автори: Грабченко Анатолій Іванович, Гаращенко Ярослав Миколайович, Хорват Матяш, Доброскок Володимир Ленінмирович, Уварова Юлія Леонідівна
МПК: B24B 53/04
Мітки: робочою, переривчастою, правки, пристрій, круга, зв'язці, поверхнею, електропровідний, шліфувального
Текст:
...електрохімічна правка поверхні круга. Тому що пристрій забезпечує подачу імпульсів синхронно з поворотом круга на кут, обумовлений кроком западин на поверхні круга, а ділянки робочої поверхні круга мають довжину, також обумовлену кроком цих западин, ділянка поверхні круга, на якому формується западина. послідовно проходить через електропровідні частини ділянок і їхній сумарний вплив визначає розміри і форму западин на робочій поверхні...
Попередній патент: Спосіб відсмоктування продуктів згорання із циліндра двигуна внутрішнього згорання
Наступний патент: Пристрій для витискування вмісту тюбиків
Випадковий патент: Спосіб контролю радіозахисних властивостей харчового продукту та пристрій для його здійснення