Система управління підвіскою автомобіля на основі нейро-нечіткого регулювання
Номер патенту: 103571
Опубліковано: 25.12.2015

Формула / Реферат
Система управління підвіскою автомобіля, що складається з датчиків, системи виконавчих приводів та об'єкта стабілізації, тобто кузова автомобіля, яка відрізняється тим, що в систему управління підвіскою додатково встановлюється нейро-нечіткий регулятор у зворотному зв'язку по куту відхилення об'єкта стабілізації.
Текст
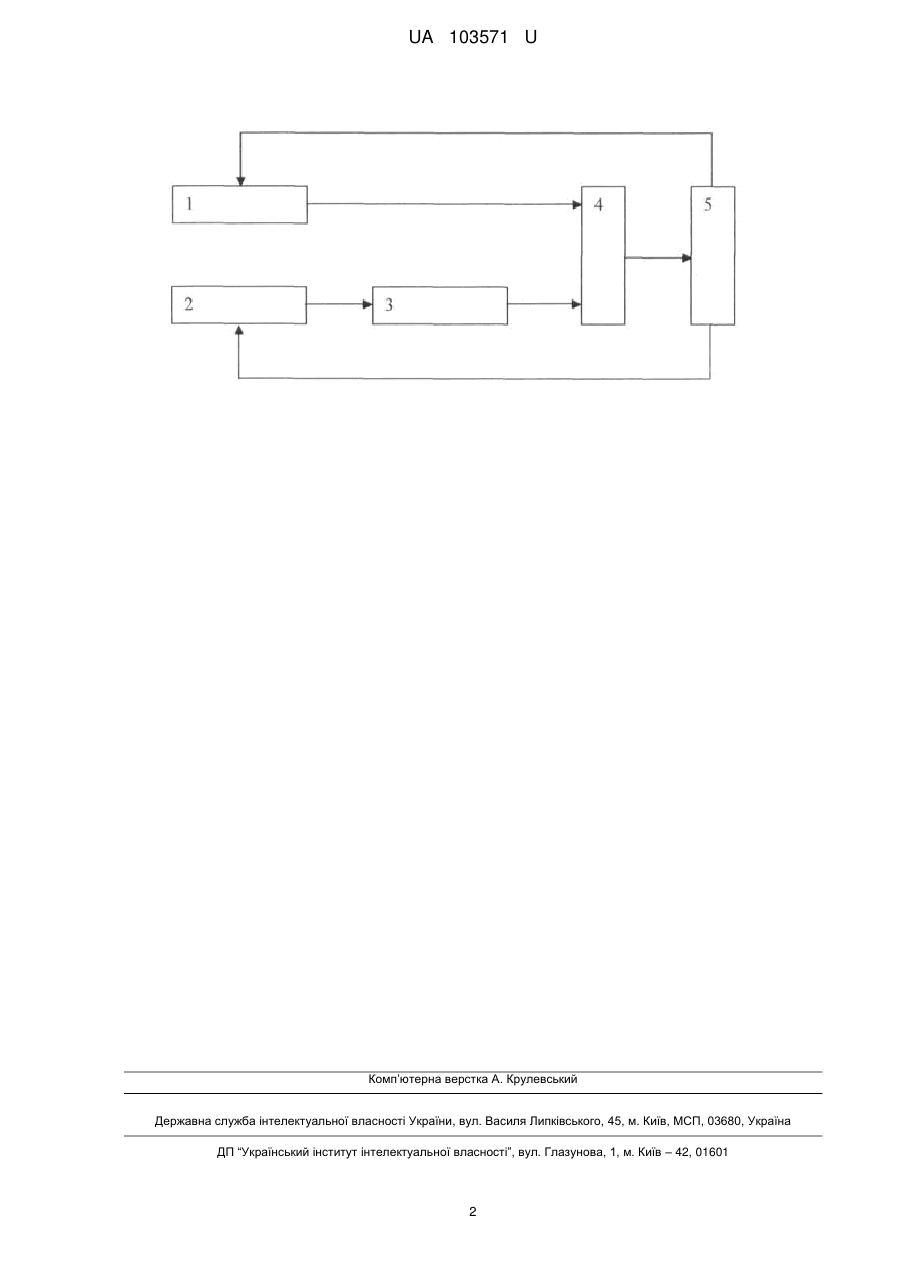
Реферат: Система управління підвіскою автомобіля складається з датчиків, системи виконавчих приводів та об'єкта стабілізації, тобто кузова автомобіля. Додатково встановлюється нейро-нечіткий регулятор у зворотному зв'язку по куту відхилення об'єкта стабілізації. UA 103571 U (12) UA 103571 U UA 103571 U 5 10 15 20 25 30 35 40 45 Корисна модель належить до галузі автомобільного транспорту і може бути використана для ефективної технічної експлуатації автомобілів, стабілізації положення кузова при коливанні корпусу автомобіля та поліпшення експлуатаційних характеристик підвісок. Відома система управління: система адаптивного управління ходової частини DCC від Volkswagen (http://jetta-club.org/uploads/ssp/ssp_rus/406_adaptivnaya%20podveska%20dcc.pdf) Система адаптивного управління ходової частини DCC завжди активна. Вона є інтелектуальною, саморегулюючою системою, що управляє амортизаторами автомобіля залежно від наступних факторів: якості дорожнього покриття, поточної ситуації на дорозі, запитів водія. Залежно від дорожньої ситуації характеристики амортизаторів змінюються таким чином, щоб гасити поздовжні і поперечні крени. Для системи адаптивного управління ходової частини DCC використовуються телескопічні амортизатори, на яких регулювання зусилля демпфування здійснюється за допомогою встановлених на амортизатори із зовнішнього боку регульованих клапанів з електроприводом. Датчики передають сигнали, які потрібні для розрахунку необхідного режиму демпфування. Блок управління обробляє сигнали датчиків і постійно розраховує, з урахуванням дорожнього покриття, ситуації на дорозі і запитів водія, оптимальну напругу для кожного з амортизаторів. Він регулює ступінь демпфування шляхом зміни напруги, за допомогою регульованих клапанів адаптуючи зусилля демпфування до вибраного режиму демпфування. Дана система управління за своєю суттю та функціями є найбільш близькою до заявленої системи управління, тому вибрана як найближчий аналог. Недоліком цієї системи управління є те, що вона здійснює регулювання за рахунок управління виконавчими органами підвіски, але не дає можливість автоматичної роботи зі знаннями та самонавчання. В основу корисної моделі поставлено задачу удосконалення системи управління підвіскою автомобіля за рахунок того, що в роботі системи управління підвіскою приймає участь нейронечіткий регулятор, встановлений у зворотний зв'язок по куту відхилення об'єкта стабілізації. Поставлена задача вирішується тим, що до системи управління підвіскою автомобіля, згідно з корисною моделлю, вводиться нейро-нечіткий регулятор, встановлений у зворотний зв'язок по куту відхилення об'єкта стабілізації. На кресленні приведена структурна схема системи управління підвіскою автомобіля на основі нейро-нечіткого регулювання, де: 1 - датчик кутової швидкості, 2 - датчик кута, 3 - нейронечіткий регулятор, 4 - система виконавчих приводів, 5 - об'єкт стабілізації. Система управління підвіскою автомобіля на основі нейро-нечіткого регулювання працює наступним чином: потрібне положення корпуса автомобіля задається за допомогою датчика кутової швидкості та датчика кута, які встановлюються безпосередньо на кузові автомобіля, що дозволяє безперервно вимірювати відхилення об'єкта стабілізації від заданого положення в просторі. Нейро-нечіткий регулятор встановлюється у зворотний зв'язок по куту відхилення об'єкта стабілізації. Якщо під впливом збурюючого моменту, обумовленого зовнішніми факторами, об'єкт стабілізації відхиляється від заданого положення на деякий кут, то на виході датчика кута рівня кузова з'являється інформація, що надходить до нейро-нечіткого регулятора, де формується команда, яка далі подається до входу системи виконавчих приводів. Система виконавчих приводів створює активний стабілізуючий момент, який протидіє збурюючому моменту та зменшує кутове розходження. Чим повніше момент стабілізації буде компенсувати збурюючий момент, тим менше буде відхилення кузова автомобіля від заданого положення і точніше буде здійснюватись стабілізація його положення. Система управління може використовуватися на автомобілях, що мають відповідну функціонально-технічну базу для її встановлення. 50 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 Система управління підвіскою автомобіля, що складається з датчиків, системи виконавчих приводів та об'єкта стабілізації, тобто кузова автомобіля, яка відрізняється тим, що в систему управління підвіскою додатково встановлюється нейро-нечіткий регулятор у зворотному зв'язку по куту відхилення об'єкта стабілізації. 1 UA 103571 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B60G 17/0165, B60G 17/015, B60G 17/00, B60G 17/018
Мітки: управління, автомобіля, нейро-нечіткого, підвіскою, регулювання, система, основі
Код посилання
<a href="https://ua.patents.su/4-103571-sistema-upravlinnya-pidviskoyu-avtomobilya-na-osnovi-nejjro-nechitkogo-regulyuvannya.html" target="_blank" rel="follow" title="База патентів України">Система управління підвіскою автомобіля на основі нейро-нечіткого регулювання</a>
Спосіб управління підвіскою автомобіля на основі нейро-нечіткого регулювання
Номер патенту: 103566
Опубліковано: 25.12.2015
Автори: Шуляков Владислав Миколайович, Ніконов Олег Якович
МПК: B60G 17/0165, B60G 17/018, B60G 17/00, B60G 17/015
Мітки: нейро-нечіткого, регулювання, спосіб, автомобіля, основі, управління, підвіскою
Формула / Реферат:
Спосіб управління підвіскою автомобіля, що здійснюють за допомогою системи управління, який відрізняється тим, що інформацію, яку отримують з приладу реєстрації зміни кута кузова, оброблюють за допомогою нейро-нечіткої системи, яка формує команди для виконавчої системи, що впливає на кузов автомобіля.
Система адаптивного управління сушаркою солоду на основі нечіткого підходу
Номер патенту: 89465
Опубліковано: 25.04.2014
Автори: Ладанюк Анатолій Петрович, Смітюх Ярослав Володимирович, Герасименко Тетяна Михайлівна
Мітки: підходу, управління, нечіткого, адаптивного, сушаркою, солоду, основі, система
Формула / Реферат:
Система адаптивного управління сушаркою солоду на основі нечіткого підходу, що складається з об'єкта керування, датчиків, регулювальних органів, виконавчих механізмів, пропорційно-інтегрально-диференціального регулятора, яка відрізняється тим, що в систему додається блок нечіткої логіки, який в свою чергу формується з двох вхідних каналів небалансу U*1, U*2, відповідно до кожного регульованого параметра системи, та двох вихідних каналів, що...
Спосіб нейро-нечіткого управління інтенсивністю відправлення даних вузлами-джерелами в телекомунікаційній мережі
Номер патенту: 78147
Опубліковано: 11.03.2013
Автори: Польщиков Костянтин Олександрович, Рвачова Наталія Володимирівна
МПК: G05F 1/00
Мітки: інтенсивністю, відправлення, спосіб, вузлами-джерелами, нейро-нечіткого, телекомунікаційній, управління, мережі, даних
Формула / Реферат:
Спосіб нейро-нечіткого управління інтенсивністю відправлення даних вузлами-джерелами в телекомунікаційній мережі, який полягає у тому, що у кожному такті на вузлі-джерелі здійснюється вимірювання значень часу очікування квитанцій, обчислюється значення ковзного середнього часу очікування квитанції, обчислені у попередньому та поточному тактах значення ковзного середнього часу очікування квитанції разом зі значенням затримки між відправленням...
Спосіб нейро-нечіткого управління пакетною чергою вихідного порту маршрутизатора телекомунікаційної мережі
Номер патенту: 72989
Опубліковано: 10.09.2012
Автори: Польщиков Костянтин Олександрович, Здоренко Юрій Миколайович, Шкіцькій Володимир Володимирович, Стрюк Олексій Юрійович
МПК: H04Q 9/00
Мітки: маршрутизатора, спосіб, телекомунікаційної, нейро-нечіткого, порту, мережі, пакетною, чергою, управління, вихідного
Формула / Реферат:
Спосіб нейро-нечіткого управління пакетною чергою вихідного порту маршрутизатора телекомунікаційної мережі полягає у тому, що протягом кожної ділянки часу встановленої тривалості здійснюється підрахунок кількості пакетів, що надходять до вихідного порту маршрутизатора для подальшого передавання, підраховані значення кількості пакетів, що надійшли до вихідного порту маршрутизатора протягом чотирьох попередніх ділянок часу, як вхідні величини...
Пневмосистема управління підвіскою тролейбуса
Номер патенту: 81500
Опубліковано: 25.06.2013
Автор: Бутко Володимир Іванович
МПК: B60G 23/00
Мітки: тролейбуса, пневмосистема, підвіскою, управління
Формула / Реферат:
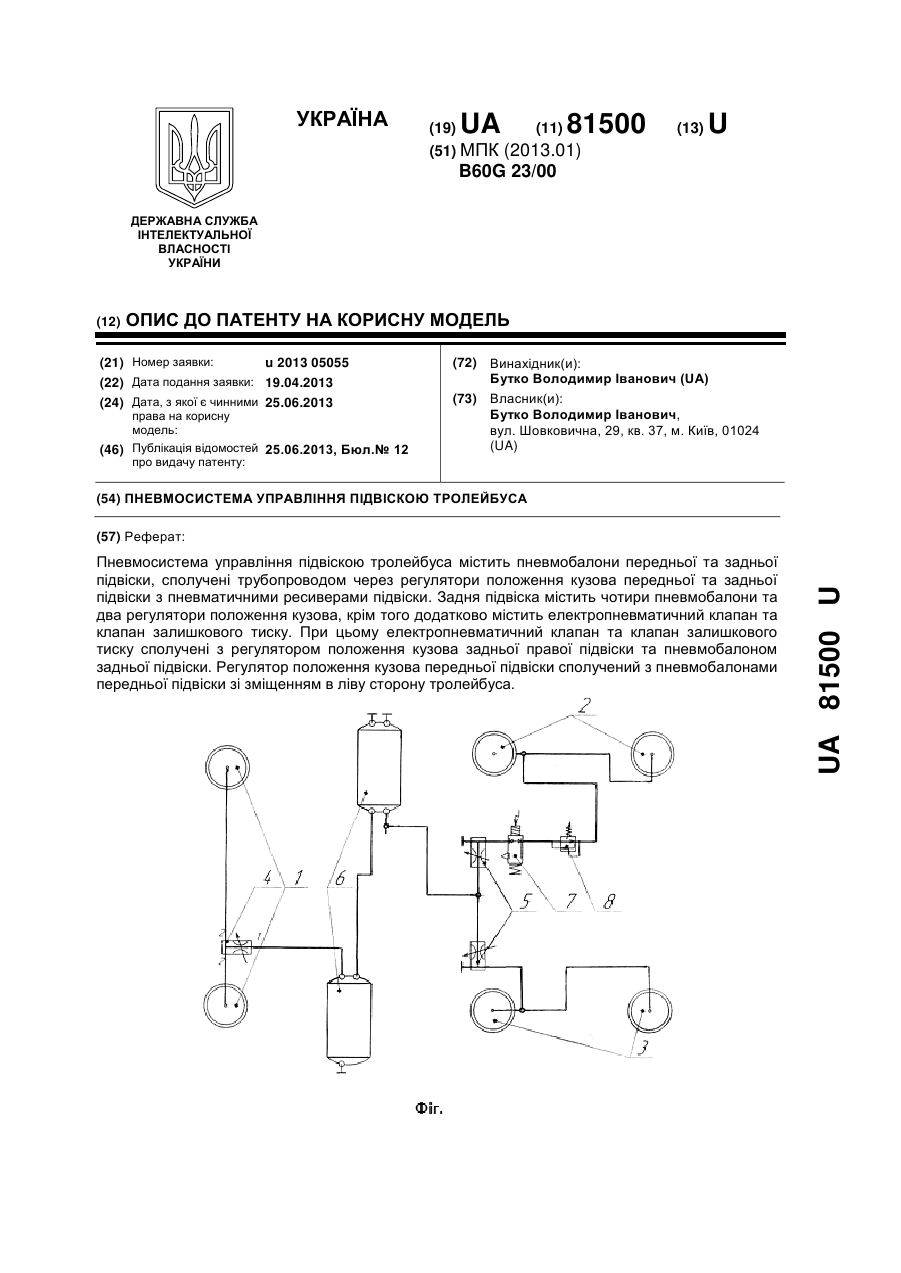
Пневмосистема управління підвіскою тролейбуса, що містить пневмобалони передньої та задньої підвіски, сполучені трубопроводом через регулятори положення кузова передньої та задньої підвіски з пневматичними ресиверами підвіски, яка відрізняється тим, що задня підвіска містить чотири пневмобалони та два регулятора положення кузова, крім того додатково містить електропневматичний клапан та клапан залишкового тиску, при цьому електропневматичний...
Попередній патент: Спосіб нанесення покриття
Наступний патент: Спосіб виробництва ординарного столового сухого білого виноградного вина “талісман таїровський”
Випадковий патент: Пристрій для профілювання обичайок