Система адаптивного управління верстатом з числовим програмним управлінням
Номер патенту: 108543
Опубліковано: 25.07.2016
Автори: Мацківський Олександр Сергійович, Петраков Юрій Володимирович
Формула / Реферат
Система адаптивного управління верстатом з числовим програмним управлінням, що складається з програмного модуля на базі персонального комп'ютера і системи управління верстата, яка відрізняється тим, що персональний комп'ютер зв'язаний інтерфейсом RS-232 зі стійкою і через апаратний модуль з'єднаний з енкодером ручного управління верстата.
Текст
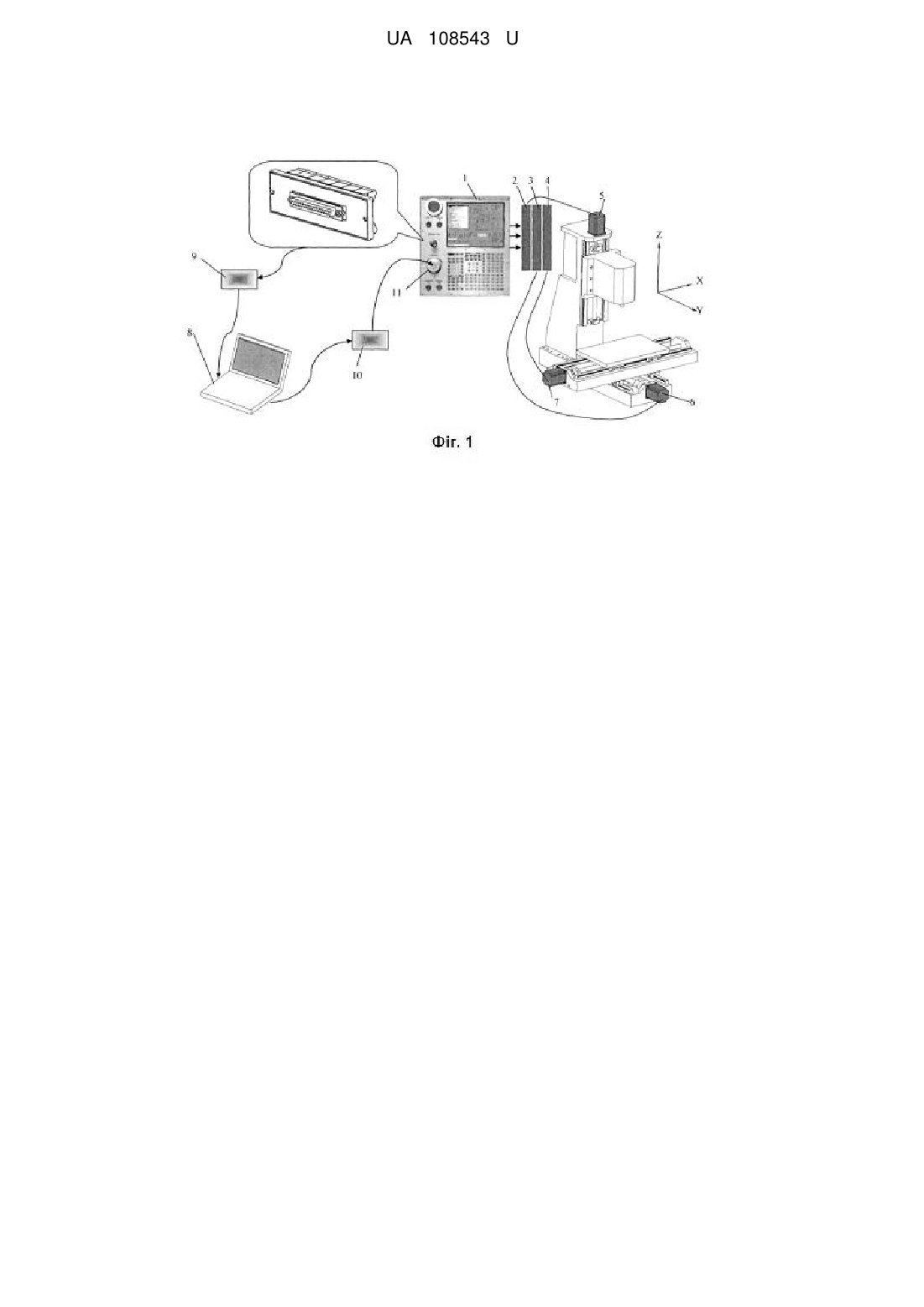
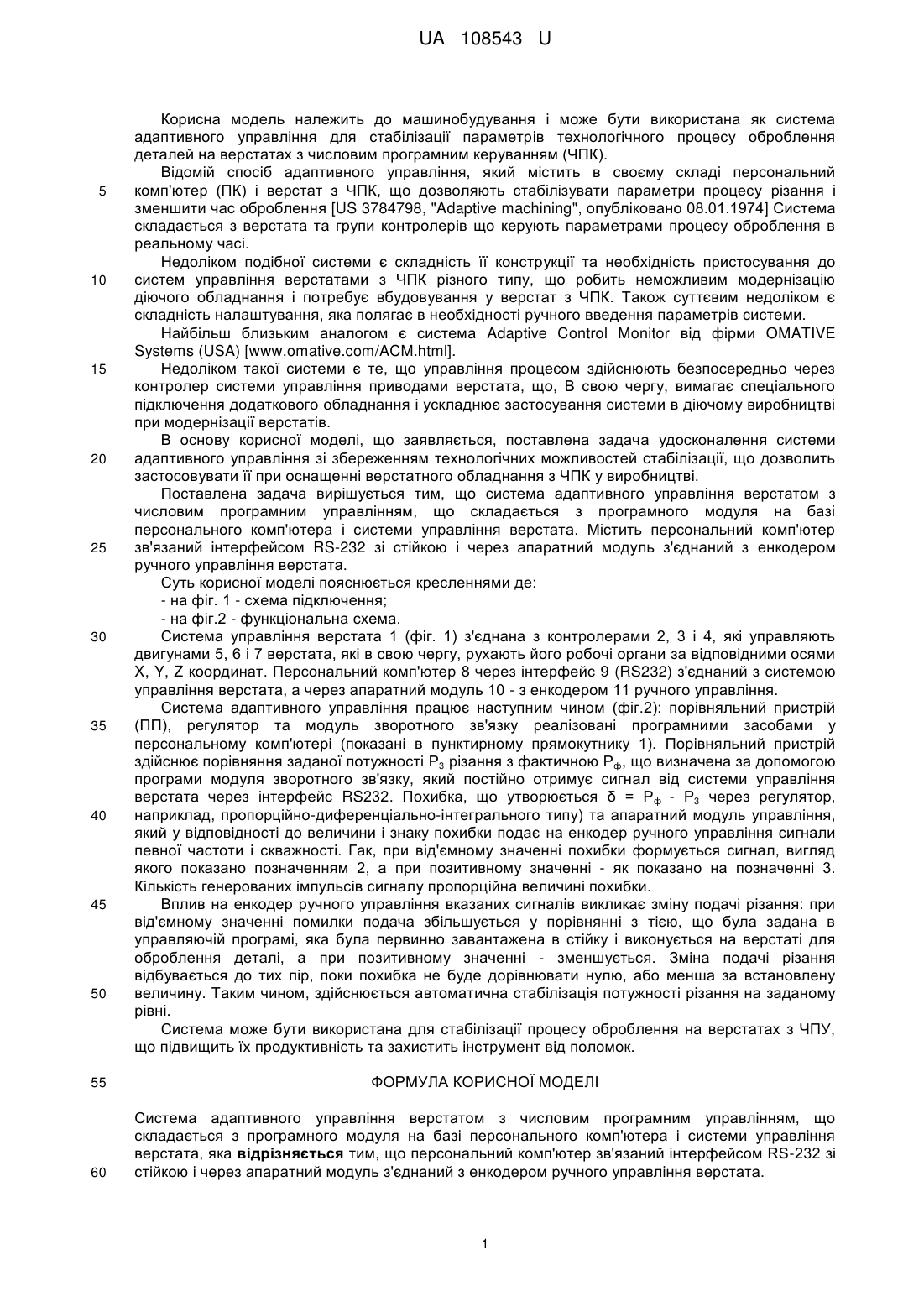
Реферат: Система адаптивного управління верстатом з числовим програмним управлінням складається з програмного модуля на базі персонального комп'ютера і системи управління верстата. Персональний комп'ютер зв'язаний інтерфейсом RS-232 зі стійкою і через апаратний модуль з'єднаний з енкодером ручного управління верстата. UA 108543 U (12) UA 108543 U UA 108543 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до машинобудування і може бути використана як система адаптивного управління для стабілізації параметрів технологічного процесу оброблення деталей на верстатах з числовим програмним керуванням (ЧПК). Відомій спосіб адаптивного управління, який містить в своєму складі персональний комп'ютер (ПК) і верстат з ЧПК, що дозволяють стабілізувати параметри процесу різання і зменшити час оброблення [US 3784798, "Adaptive machining", опубліковано 08.01.1974] Система складається з верстата та групи контролерів що керують параметрами процесу оброблення в реальному часі. Недоліком подібної системи є складність її конструкції та необхідність пристосування до систем управління верстатами з ЧПК різного типу, що робить неможливим модернізацію діючого обладнання і потребує вбудовування у верстат з ЧПК. Також суттєвим недоліком є складність налаштування, яка полягає в необхідності ручного введення параметрів системи. Найбільш близьким аналогом є система Adaptive Control Monitor від фірми OMATIVE Systems (USA) [www.omative.com/ACM.html]. Недоліком такої системи є те, що управління процесом здійснюють безпосередньо через контролер системи управління приводами верстата, що, В свою чергу, вимагає спеціального підключення додаткового обладнання і ускладнює застосування системи в діючому виробництві при модернізації верстатів. В основу корисної моделі, що заявляється, поставлена задача удосконалення системи адаптивного управління зі збереженням технологічних можливостей стабілізації, що дозволить застосовувати її при оснащенні верстатного обладнання з ЧПК у виробництві. Поставлена задача вирішується тим, що система адаптивного управління верстатом з числовим програмним управлінням, що складається з програмного модуля на базі персонального комп'ютера і системи управління верстата. Містить персональний комп'ютер зв'язаний інтерфейсом RS-232 зі стійкою і через апаратний модуль з'єднаний з енкодером ручного управління верстата. Суть корисної моделі пояснюється кресленнями де: - на фіг. 1 - схема підключення; - на фіг.2 - функціональна схема. Система управління верстата 1 (фіг. 1) з'єднана з контролерами 2, 3 і 4, які управляють двигунами 5, 6 і 7 верстата, які в свою чергу, рухають його робочі органи за відповідними осями X, Y, Z координат. Персональний комп'ютер 8 через інтерфейс 9 (RS232) з'єднаний з системою управління верстата, а через апаратний модуль 10 - з енкодером 11 ручного управління. Система адаптивного управління працює наступним чином (фіг.2): порівняльний пристрій (ПП), регулятор та модуль зворотного зв'язку реалізовані програмними засобами у персональному комп'ютері (показані в пунктирному прямокутнику 1). Порівняльний пристрій здійснює порівняння заданої потужності Р3 різання з фактичною Рф, що визначена за допомогою програми модуля зворотного зв'язку, який постійно отримує сигнал від системи управління верстата через інтерфейс RS232. Похибка, що утворюється δ = Рф - Р3 через регулятор, наприклад, пропорційно-диференціально-інтегрального типу) та апаратний модуль управління, який у відповідності до величини і знаку похибки подає на енкодер ручного управління сигнали певної частоти і скважності. Гак, при від'ємному значенні похибки формується сигнал, вигляд якого показано позначенням 2, а при позитивному значенні - як показано на позначенні 3. Кількість генерованих імпульсів сигналу пропорційна величині похибки. Вплив на енкодер ручного управління вказаних сигналів викликає зміну подачі різання: при від'ємному значенні помилки подача збільшується у порівнянні з тією, що була задана в управляючій програмі, яка була первинно завантажена в стійку і виконується на верстаті для оброблення деталі, а при позитивному значенні - зменшується. Зміна подачі різання відбувається до тих пір, поки похибка не буде дорівнювати нулю, або менша за встановлену величину. Таким чином, здійснюється автоматична стабілізація потужності різання на заданому рівні. Система може бути використана для стабілізації процесу оброблення на верстатах з ЧПУ, що підвищить їх продуктивність та захистить інструмент від поломок. 55 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 60 Система адаптивного управління верстатом з числовим програмним управлінням, що складається з програмного модуля на базі персонального комп'ютера і системи управління верстата, яка відрізняється тим, що персональний комп'ютер зв'язаний інтерфейсом RS-232 зі стійкою і через апаратний модуль з'єднаний з енкодером ручного управління верстата. 1 UA 108543 U Комп’ютерна верстка М. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B23Q 15/00, G05B 19/00
Мітки: програмним, управління, система, управлінням, верстатом, числовим, адаптивного
Код посилання
<a href="https://ua.patents.su/4-108543-sistema-adaptivnogo-upravlinnya-verstatom-z-chislovim-programnim-upravlinnyam.html" target="_blank" rel="follow" title="База патентів України">Система адаптивного управління верстатом з числовим програмним управлінням</a>
Пристрій відліку координат верстатів з числовим програмним управлінням (чпу)
Номер патенту: 106486
Опубліковано: 25.04.2016
Автори: Швець Євген Якович, Юдачов Андрій Валерійович, Шило Анна Сергійовна
МПК: G05B 19/18
Мітки: відліку, координат, програмним, числовим, управлінням, пристрій, чпу, верстатів
Формула / Реферат:
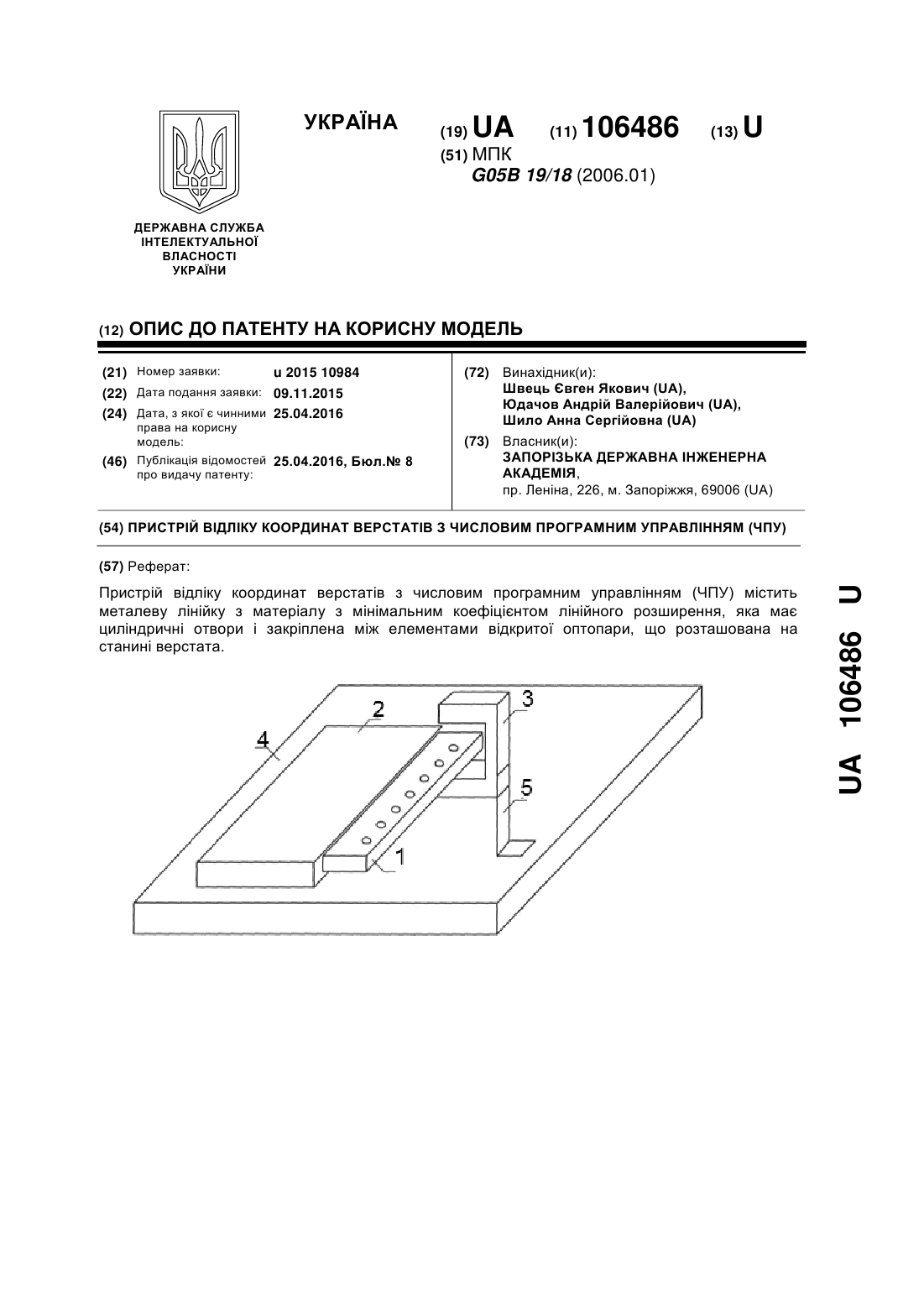
Пристрій відліку координат верстатів з числовим програмним управлінням (ЧПУ), який відрізняється тим, що містить металеву лінійку з матеріалу з мінімальним коефіцієнтом лінійного розширення, яка має циліндричні отвори і закріплена між елементами відкритої оптопари, що розташована на станині верстата з ЧПУ.
Застосування металорізального верстата з числовим програмним управлінням як пристрою для намотування дроту на котушковий модуль
Номер патенту: 69381
Опубліковано: 25.04.2012
Автори: Максаков Анатолій Іванович, Алімов Валерій Іванович, Максакова Анна Анатоліївна
МПК: B21F 3/00
Мітки: намотування, дроту, застосування, модуль, верстата, котушковий, управлінням, програмним, металорізального, пристрою, числовим
Формула / Реферат:
Застосування металорізального верстату з числовим програмним управлінням як пристрою для намотування дроту на котушковий модуль.
Спосіб адаптивного управління
Номер патенту: 63466
Опубліковано: 10.10.2011
Автори: Пестунов Володимир Михайлович, Стеценко Олексій Сергійович
МПК: B23Q 5/00
Мітки: адаптивного, управління, спосіб
Формула / Реферат:
Спосіб адаптивного управління, що включає контроль навантаження і за результатами здійснення регулювання подачі, який відрізняється тим, що навантаження виконавчого органу приводу подачі при заданих режимах обробки знижують до оптимального по точності рівня і на цьому рівні стабілізують, причому зниження навантаження здійснюють шляхом розділення потоку потужності кінематичного ланцюга подачі, для цього частину потужності передають з...
Система адаптивного управління сушаркою солоду на основі нечіткого підходу
Номер патенту: 89465
Опубліковано: 25.04.2014
Автори: Ладанюк Анатолій Петрович, Герасименко Тетяна Михайлівна, Смітюх Ярослав Володимирович
Мітки: сушаркою, підходу, нечіткого, солоду, управління, основі, адаптивного, система
Формула / Реферат:
Система адаптивного управління сушаркою солоду на основі нечіткого підходу, що складається з об'єкта керування, датчиків, регулювальних органів, виконавчих механізмів, пропорційно-інтегрально-диференціального регулятора, яка відрізняється тим, що в систему додається блок нечіткої логіки, який в свою чергу формується з двох вхідних каналів небалансу U*1, U*2, відповідно до кожного регульованого параметра системи, та двох вихідних каналів, що...
Стенд функціонального контролю і діагностики токарних верстатів з числовим програмним керуванням
Номер патенту: 37797
Опубліковано: 10.12.2008
Автори: Фоменко Андрій Миколайович, Шарейко Дмитро Юрійович, Нестеренко Олександр Сергійович
МПК: G05B 23/02
Мітки: керуванням, діагностики, функціонального, верстатів, стенд, програмним, контролю, токарних, числовим
Формула / Реферат:
1. Стенд функціонального контролю і діагностики токарних верстатів з числовим програмним керуванням, що містить персональний комп'ютер, сполучений з пристроєм числового програмного керування через роз'єм інтерфейсу фотозчитуючого пристрою, пристрій числового програмного керування, сполучений з асинхронним електроприводом, електропривод асинхронний, сполучений з електродвигунами двох механізмів подачі і електродвигуном шпинделя, три асинхронні...
Попередній патент: Інструментальна оправка для оброблення глибоких отворів
Наступний патент: Комплекс промислового виробництва порошку карбіду кремнію високої якості
Випадковий патент: Механізм навішення штанги обприскувача