Адаптивний пристрій управління оптимальний за швидкодією та стійкий до короткочасних впливів, що збурюють
Номер патенту: 122196
Опубліковано: 26.12.2017
Автори: Смірнов Володимир Вікторович, Смірнова Наталія Володимирівна
Формула / Реферат
Адаптивний пристрій управління оптимальний за швидкодією та стійкий до короткочасних впливів, що збурюють, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом нелінійного перетворювача, а другий - з блоком прийняття статистичних гіпотез, релейного елемента, вхід якого з'єднаний з виходом суматора, об'єкта управління, вхід якого з'єднаний з виходом релейного елемента, а вихід з'єднаний з другим входом блока порівняння, статистичного блока, вхід якого з'єднаний з виходом блока порівняння, блока прийняття статистичних гіпотез, вхід якого з'єднаний з виходом статистичного блока, а вихід з'єднаний з суматором, який відрізняється тим, що додатково введений блок накопичення статистичних даних, один вхід якого з'єднаний з виходом блока порівняння, другий вхід з'єднаний з виходом статистичного блока, а вихід з'єднаний з блоком прийняття статистичних гіпотез.
Текст
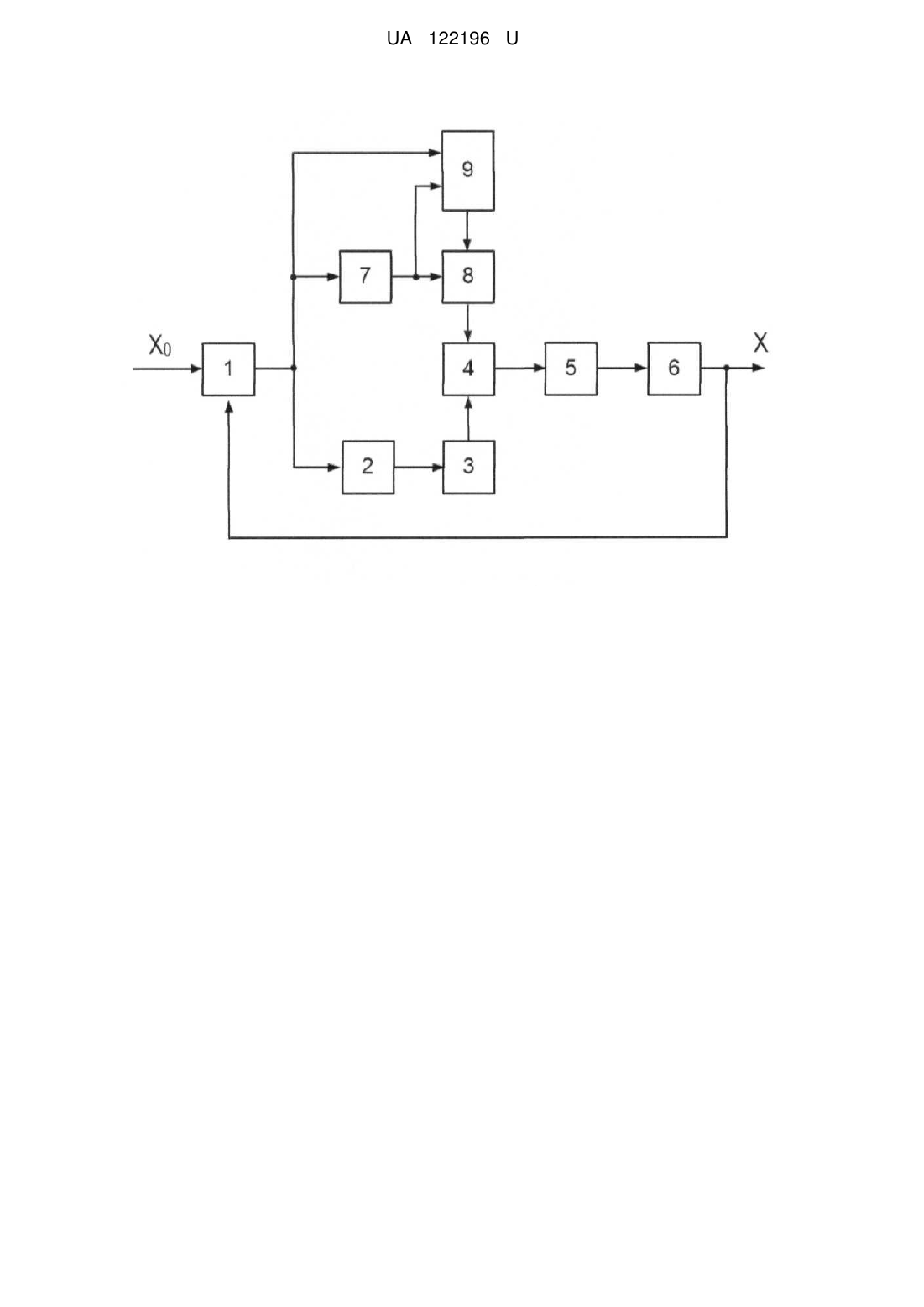
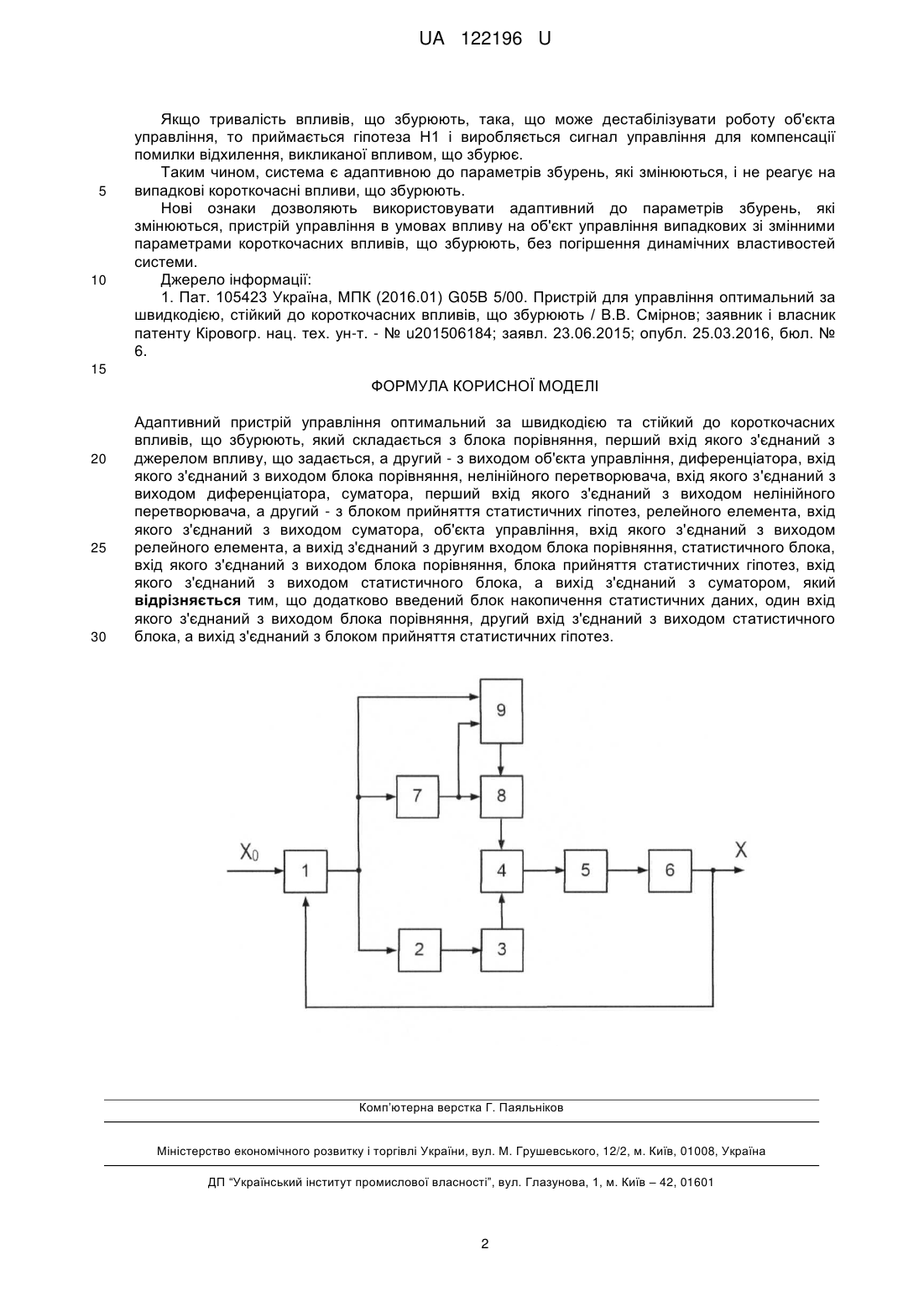
Реферат: Адаптивний пристрій управління оптимальний за швидкодією та стійкий до короткочасних впливів, що збурюють, містить блок порівняння, з'єднаний з джерелом впливу, що задається, та з об'єктом управління, диференціатор, з'єднаний з блоком порівняння, нелінійний перетворювач, з'єднаний з диференціатором, суматор, з'єднаний з нелінійним перетворювачем та з блоком прийняття статистичних гіпотез, релейний елемент, з'єднаний з суматором, об'єкт управління, з'єднаний з релейним елементом та з блоком порівняння, статистичний блок, з'єднаний з блоком порівняння, блок прийняття статистичних гіпотез, з'єднаний з статистичним блоком та з суматором. Додатково введений блок накопичення статистичних даних, з'єднаний з блоком порівняння, з статистичним блоком та з блоком прийняття статистичних гіпотез. UA 122196 U (54) АДАПТИВНИЙ ПРИСТРІЙ УПРАВЛІННЯ ОПТИМАЛЬНИЙ ЗА ШВИДКОДІЄЮ ТА СТІЙКИЙ ДО КОРОТКОЧАСНИХ ВПЛИВІВ, ЩО ЗБУРЮЮТЬ UA 122196 U UA 122196 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі приладобудування і може бути використана в системах автоматичного управління (САУ) технічними об'єктами і в системах автоматичного регулювання (CAP) параметрів технічних об'єктів різного призначення. Відоме рішення [1] виконано у вигляді схеми оптимального за швидкодією управління об'єктом у фазовому просторі. Для досягнення оптимального за швидкодією перехідного процесу підтримується максимальний рівень позитивного впливу, що управляє для розгону об'єкта і максимальний від'ємний рівень впливу, що управляє для гальмування об'єкта. Статистичний блок, використовуючи критерій відношення правдоподібності приймає одну із гіпотез Н0 або Н1, де Н0 відповідає стану "помилкова тривога" (помилка першого роду). У цьому випадку пристрій управління не реагує на випадкові збурювання. Недоліком такої САУ є постійне значення критерію для прийняття гіпотез Н0 або Н1, що не є оптимальним рішенням в умовах зміни параметрів збурень. В основу корисної моделі поставлена задача, яка полягає в забезпеченні адаптивного оптимального за швидкодією та в поліпшенні якості управління об'єктом в умовах впливу на об'єкт управління короткочасних впливів, що збурюють. Поставлена задача вирішується за рахунок того, що у відомий пристрій додатково введений блок накопичення статистичних даних, один вхід якого з'єднаний з виходом блока порівняння, другий вхід з'єднаний з виходом статистичного блока, а вихід з'єднаний з блоком прийняття статистичних гіпотез. Пристрій складається з блока порівняння 1, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління 6, диференціатора 2, вхід якого з'єднаний з виходом блока порівняння 1, нелінійного перетворювача 3, вхід якого з'єднаний з виходом диференціатора 2, суматора 4, перший вхід якого з'єднаний з виходом нелінійного перетворювача 3, а другий - з блоком прийняття статистичних гіпотез 8, релейного елемента 5, вхід якого з'єднаний з виходом суматора 4, об'єкта управління 6, вхід якого з'єднаний з виходом релейного елемента, а вихід з'єднаний з другим входом блока порівняння 1, статистичного блока 7, вхід якого з'єднаний з виходом блока порівняння 1, а вихід - з блоком прийняття статистичних гіпотез 8, блока прийняття статистичних гіпотез 8, вхід якого з'єднаний з виходом статистичного блока 7, а вихід з'єднаний з суматором 4, блока накопичення статистичних даних 9, один вхід якого з'єднаний з виходом блока порівняння 1, другий вхід з'єднаний з виходом статистичного блока 7, а вихід з'єднаний з блоком прийняття статистичних гіпотез 8. Пристрій працює наступним чином. На перший вхід блока порівняння 1 надходить значення впливу ХО, що задається, а на другий вхід - значення регульованого параметра X з виходу об'єкта управління 6. На виході блока порівняння 1 формується значення помилки відхилення, яке подається на вхід диференціатора 2, на вхід статистичного блока для накопичення статистичної інформації про процес управління в заданому інтервалі спостереження 7 і на перший вхід блока накопичення статистичних даних 9. З виходу статистичного блока 7 статистичні дані надходять на вхід блока прийняття статистичних гіпотез 8, в якому на підставі критерію відношення правдоподібності приймається одна із гіпотез Н0 або Н1 і на другий вхід блока накопичення статистичних даних 9. Блок накопичення статистичних даних 9 накопичує статистику з виходу статистичного блока 7 і статистику величини сигналу помилки відхилення. Результатом накопичення статистики є співвідношення даних про помилку відхилення і даних статистичного блока протягом заданого тимчасового інтервалу. Цей результат змінює значення критерію прийняття гіпотез Н0 або Н1 в блоці прийняття статистичних гіпотез 8 в залежності від статистики зміни параметрів збурень. З виходу блока прийняття статистичних гіпотез 8 дані про прийняту гіпотезу надходять на перший вхід суматора 4. Диференціатор 2 формує величину відношення зміни значення помилки відхилення до інтервалу вимірювання, яка подається на вхід нелінійного перетворювача 3. Вихідне значення функції, обчислене нелінійним перетворювачем 3, надходить на другий вхід суматора 4. Значення на виході суматора 4 надходить на вхід релейного елемента 5, який здійснює перемикання рівня управляючого впливу від максимально позитивного значення до максимально від'ємного значення, яке надходить на вхід об'єкта управління 6. В процесі управління об'єктом прийняття статистичної гіпотези Н0 відповідає стану "помилкова тривога" (помилка першого роду). У цьому випадку сигнал для компенсації помилки відхилення не виробляється. 1 UA 122196 U 5 10 Якщо тривалість впливів, що збурюють, така, що може дестабілізувати роботу об'єкта управління, то приймається гіпотеза Н1 і виробляється сигнал управління для компенсації помилки відхилення, викликаної впливом, що збурює. Таким чином, система є адаптивною до параметрів збурень, які змінюються, і не реагує на випадкові короткочасні впливи, що збурюють. Нові ознаки дозволяють використовувати адаптивний до параметрів збурень, які змінюються, пристрій управління в умовах впливу на об'єкт управління випадкових зі змінними параметрами короткочасних впливів, що збурюють, без погіршення динамічних властивостей системи. Джерело інформації: 1. Пат. 105423 Україна, МПК (2016.01) G05B 5/00. Пристрій для управління оптимальний за швидкодією, стійкий до короткочасних впливів, що збурюють / В.В. Смірнов; заявник і власник патенту Кіровогр. нац. тех. ун-т. - № u201506184; заявл. 23.06.2015; опубл. 25.03.2016, бюл. № 6. 15 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 Адаптивний пристрій управління оптимальний за швидкодією та стійкий до короткочасних впливів, що збурюють, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом нелінійного перетворювача, а другий - з блоком прийняття статистичних гіпотез, релейного елемента, вхід якого з'єднаний з виходом суматора, об'єкта управління, вхід якого з'єднаний з виходом релейного елемента, а вихід з'єднаний з другим входом блока порівняння, статистичного блока, вхід якого з'єднаний з виходом блока порівняння, блока прийняття статистичних гіпотез, вхід якого з'єднаний з виходом статистичного блока, а вихід з'єднаний з суматором, який відрізняється тим, що додатково введений блок накопичення статистичних даних, один вхід якого з'єднаний з виходом блока порівняння, другий вхід з'єднаний з виходом статистичного блока, а вихід з'єднаний з блоком прийняття статистичних гіпотез. Комп’ютерна верстка Г. Паяльніков Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05B 5/01
Мітки: адаптивний, збурюють, впливів, пристрій, швидкодією, управління, оптимальний, короткочасних, стійкий
Код посилання
<a href="https://ua.patents.su/4-122196-adaptivnijj-pristrijj-upravlinnya-optimalnijj-za-shvidkodiehyu-ta-stijjkijj-do-korotkochasnikh-vpliviv-shho-zburyuyut.html" target="_blank" rel="follow" title="База патентів України">Адаптивний пристрій управління оптимальний за швидкодією та стійкий до короткочасних впливів, що збурюють</a>
Пристрій для управління оптимальний за швидкодією, стійкий до короткочасних впливів, що збурюють
Номер патенту: 105423
Опубліковано: 25.03.2016
Автор: Смірнов Володимир Вікторович
МПК: G05B 5/00
Мітки: пристрій, короткочасних, управління, оптимальний, швидкодією, збурюють, стійкий, впливів
Формула / Реферат:
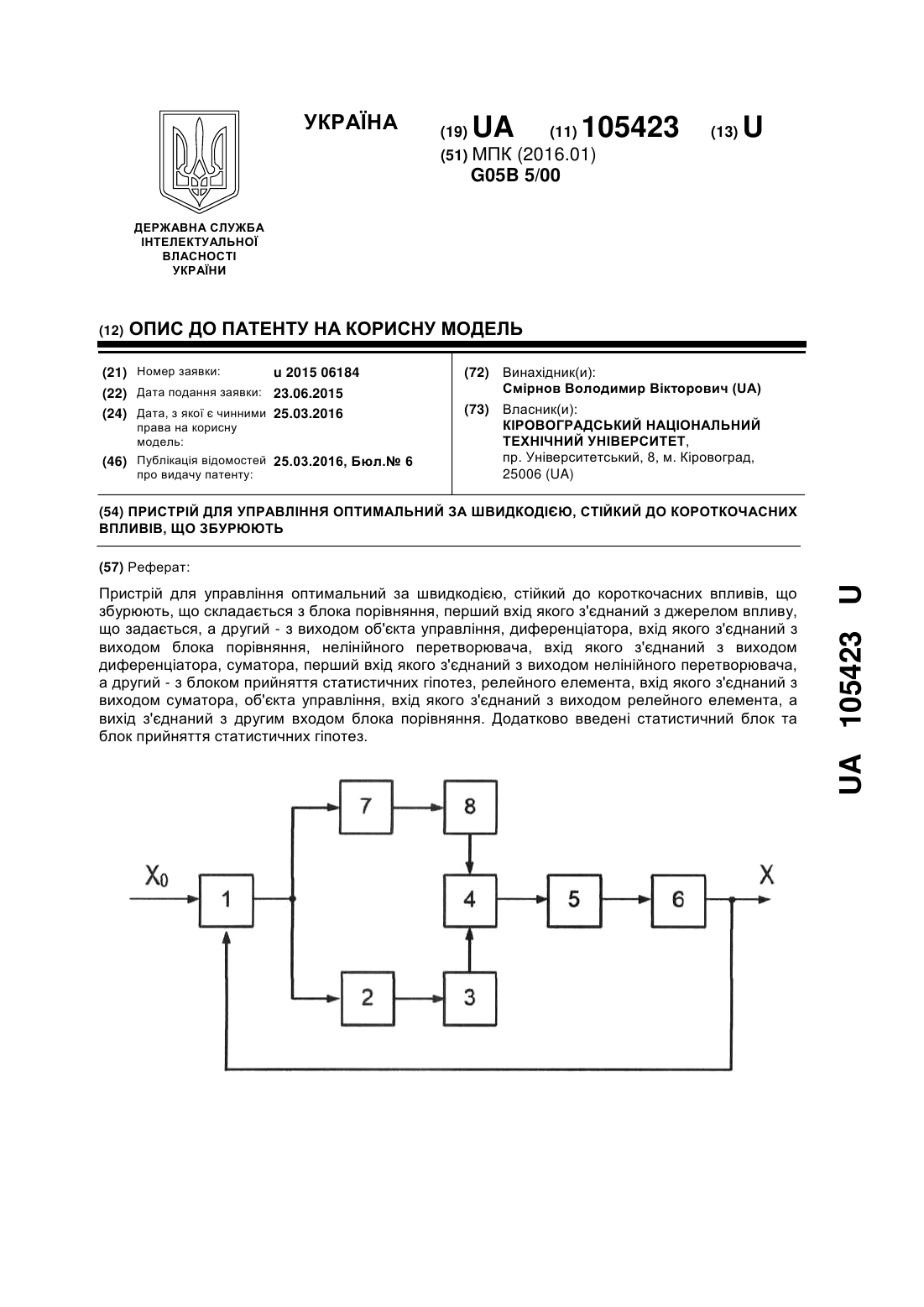
Пристрій для управління оптимальний за швидкодією, стійкий до короткочасних впливів, що збурюють, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом нелінійного...
Пристрій управління, оптимальний за швидкодією при малих похибках відхилення
Номер патенту: 105422
Опубліковано: 25.03.2016
Автор: Смірнов Володимир Вікторович
МПК: G05B 5/00
Мітки: похибках, швидкодією, пристрій, малих, відхілення, управління, оптимальний
Формула / Реферат:
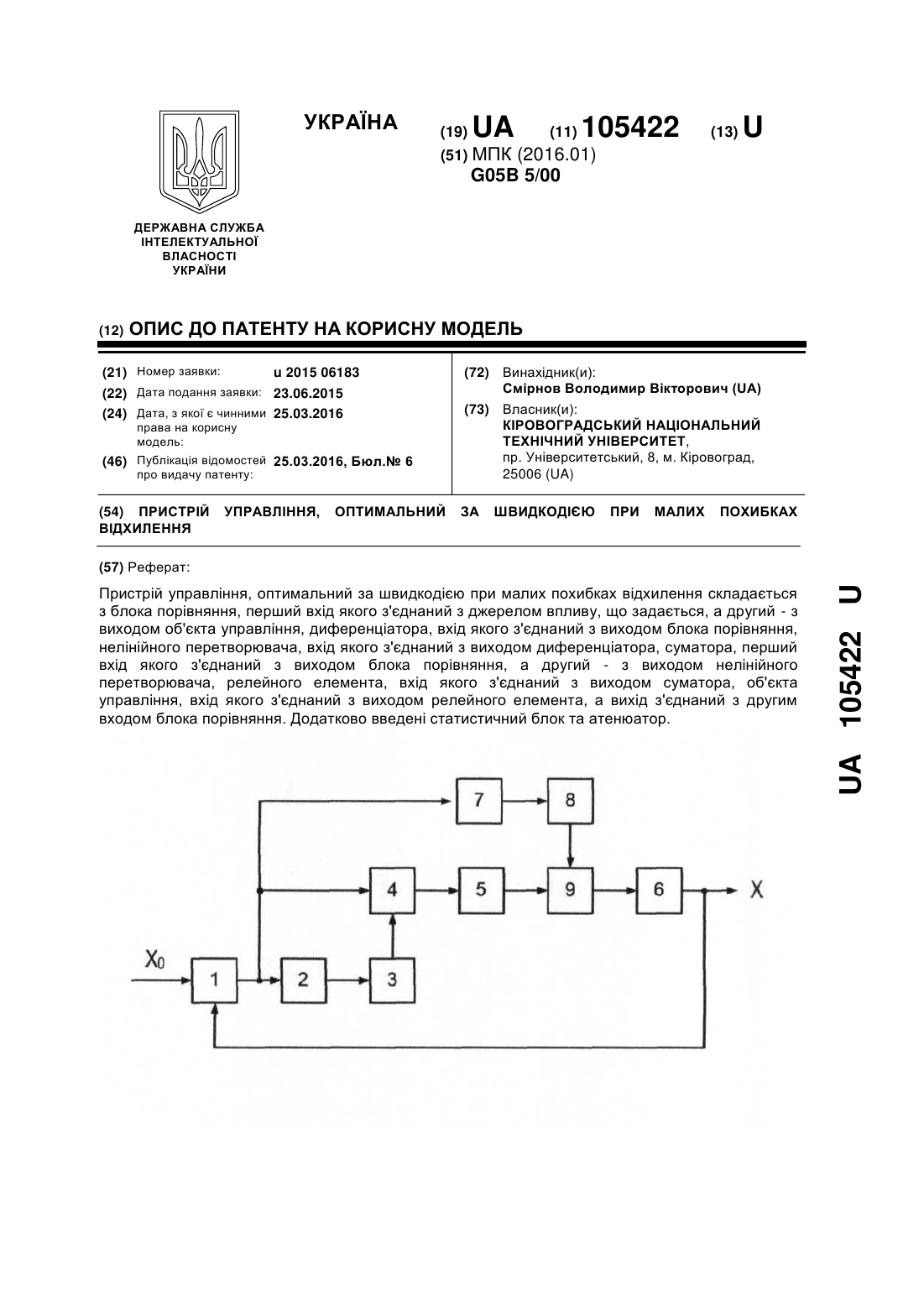
Пристрій управління, оптимальний за швидкодією при малих похибках відхилення, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом блока порівняння, а другий - з виходом...
Пристрій для управління з оптимальним значенням керуючого впливу в перехідному режимі
Номер патенту: 112686
Опубліковано: 26.12.2016
Автор: Смірнов Володимир Вікторович
МПК: G05B 11/00
Мітки: пристрій, значенням, перехідному, оптимальним, режимі, керуючого, управління, впливу
Формула / Реферат:
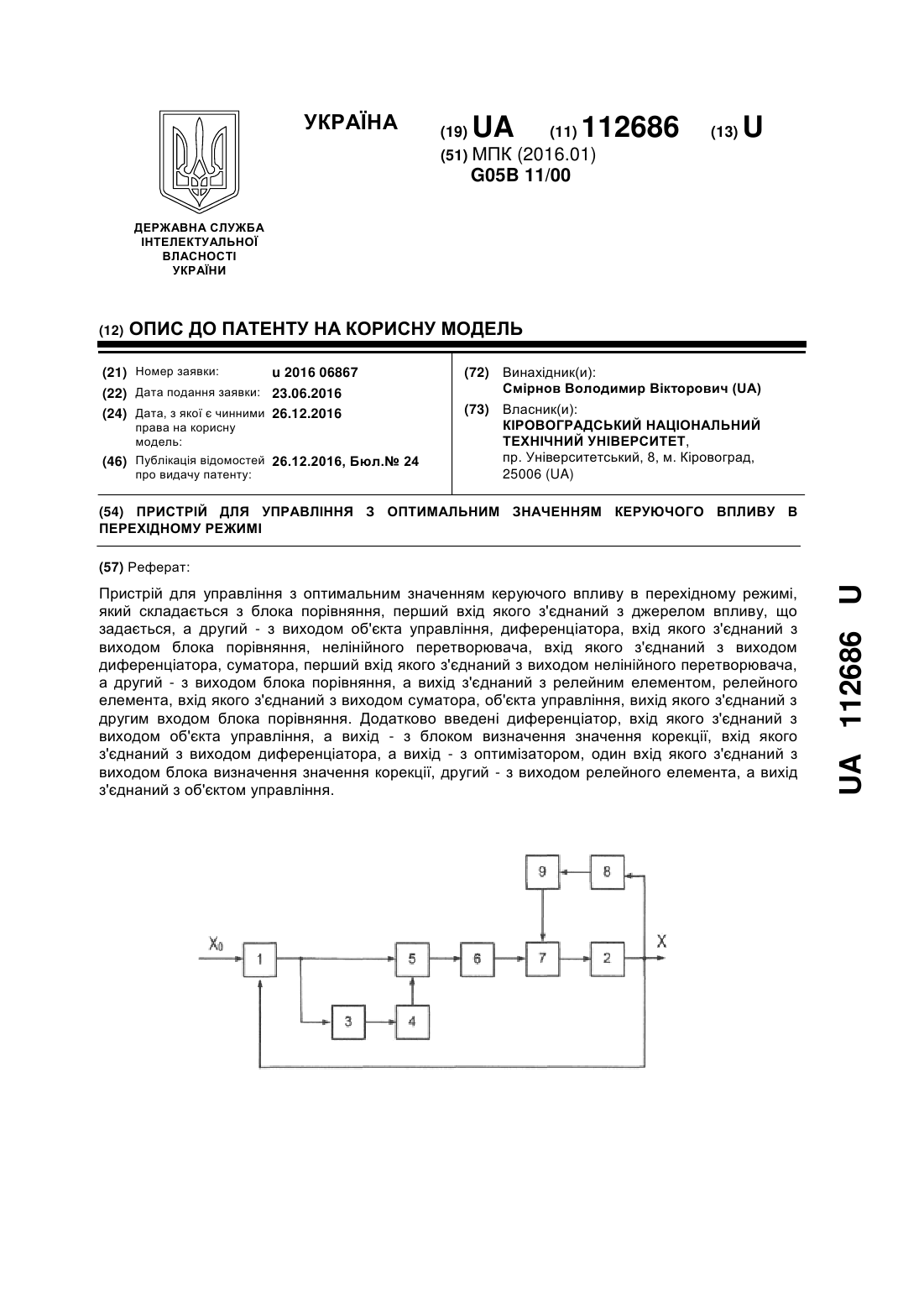
Пристрій для управління з оптимальним значенням керуючого впливу в перехідному режимі, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом нелінійного перетворювача, а...
Пристрій управління із змінним значенням початку ділянки гальмування в перехідному режимі
Номер патенту: 112688
Опубліковано: 26.12.2016
Автор: Смірнов Володимир Вікторович
МПК: G05B 1/00, G05B 21/00
Мітки: початку, управління, гальмування, перехідному, змінним, пристрій, ділянки, режимі, значенням
Формула / Реферат:
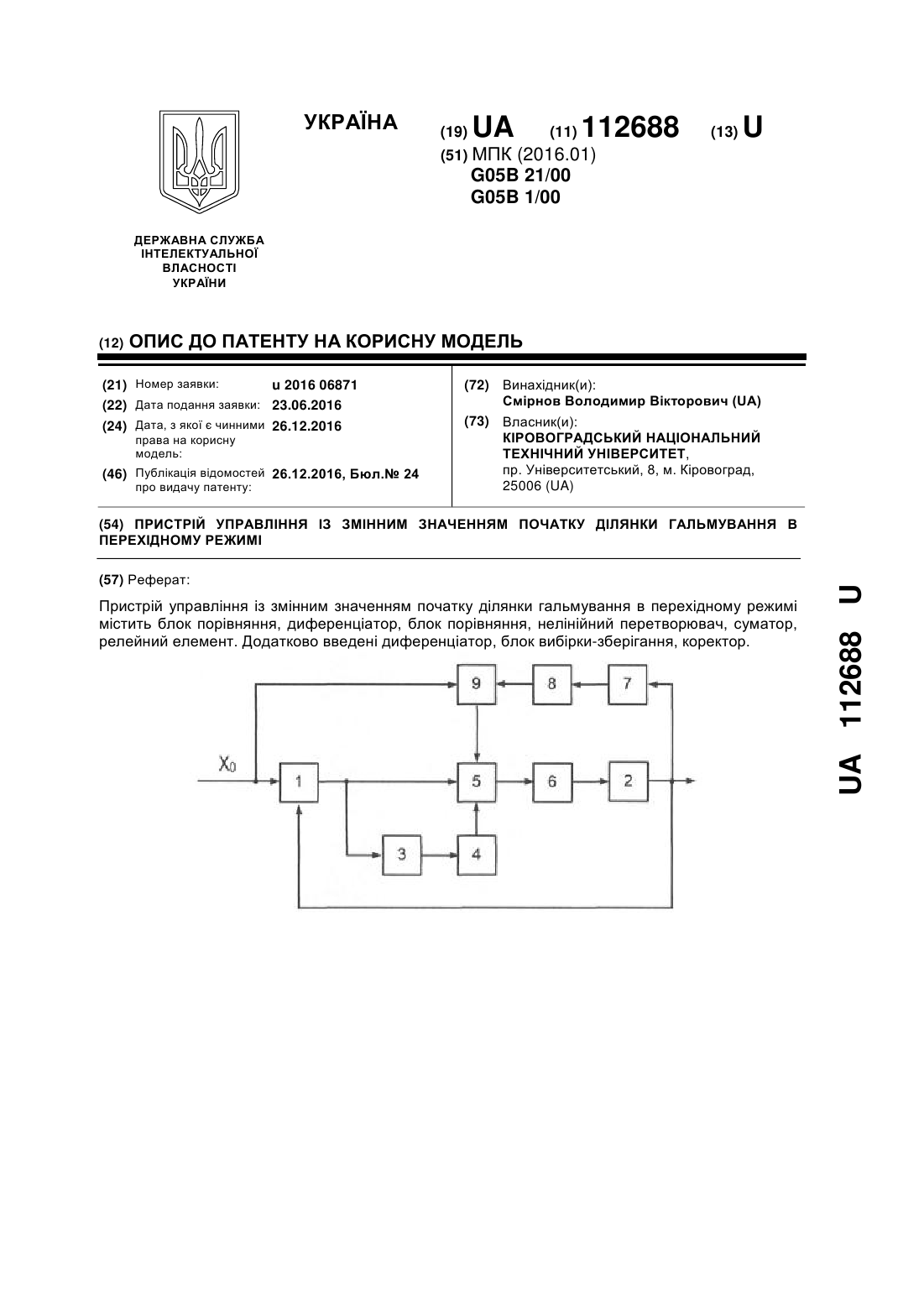
Пристрій управління із змінним значенням початку ділянки гальмування в перехідному режимі, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом нелінійного перетворювача, а...
Відмовостійкий процесорний пристрій з підвищеною швидкодією
Номер патенту: 76984
Опубліковано: 25.01.2013
Автори: Гунченко Юрій Олександрович, Лєнков Сергій Васильович, Мартинюк Сергій Михайлович, Кобозєва Алла Анатоліївна, Борисенко Ірина Іванівна
МПК: G06F 11/27
Мітки: швидкодією, підвищеною, відмовостійкий, процесорний, пристрій
Формула / Реферат:
Відмовостійкий процесорний пристрій з підвищеною швидкодією, який містить лічильник команд, регістр копії лічильника команд, блок регістрів загального призначення, блок копії регістрів загального призначення, блок пам'яті програм, блок управління та виконання команд, блок визначення сигнатури, буфер запису, блок пам'яті даних, перший регістр сигнатури, при цьому перший вихід лічильника команд, через регістр копії лічильника команд, з'єднано...
Попередній патент: Спосіб прогнозування стану імунної системи та ймовірності розвитку автоімунних і запальних реакцій в дітей у післявакцинальному періоді
Наступний патент: Гідробромід [3-аліл-4-(41-метоксифеніл)-3н-тіазол-2-іліден]-(32-трифлуорометилфеніл)аміну, що має кардіопротекторні властивості
Випадковий патент: Спосіб вибірки даних у процесі комп'ютерної перевірки знань