Пристрій для керування гідравлічними приводами механізмів пересування крану мостового типу
Номер патенту: 24103
Опубліковано: 31.08.1998
Автори: Савченко Валерій Миколайович, Коваленко Валентин Олександрович, Григоров Отто Володимирович, Вікторов Юрій Олександрович
Формула / Реферат
Формула изобретения.
Устройство для управления гидроприводами механизмов передвижения крана мостового типа, содержащее командоаппарат, кинематически связанный с сельсин-датчиком, который электрически соединен с сельсин-приемником, а также исполнительный двигатель, который через усилитель подключен к выходу сельсин-приемника и через лекало кинематически связан с ротором сельсин-приемника, отличающееся тем, что, с целью повышения качества управления за счет уменьшения динамических ударов, оно снабжено задатчиком давления в гидроприводе, датчиками давления в гидроприводе, подключенными вместе с задатчиком давления по мостовой схеме, пороговым элементом, вход которого подсоединен к выходам мостовой схемы, ключами, управляющие входы которых соединены с выходами порогового элемента, и модулятором, входы которого через ключи подсоединены к выходам мостовой схемы, а выход модулятора соединен со входом усилителя.
Текст
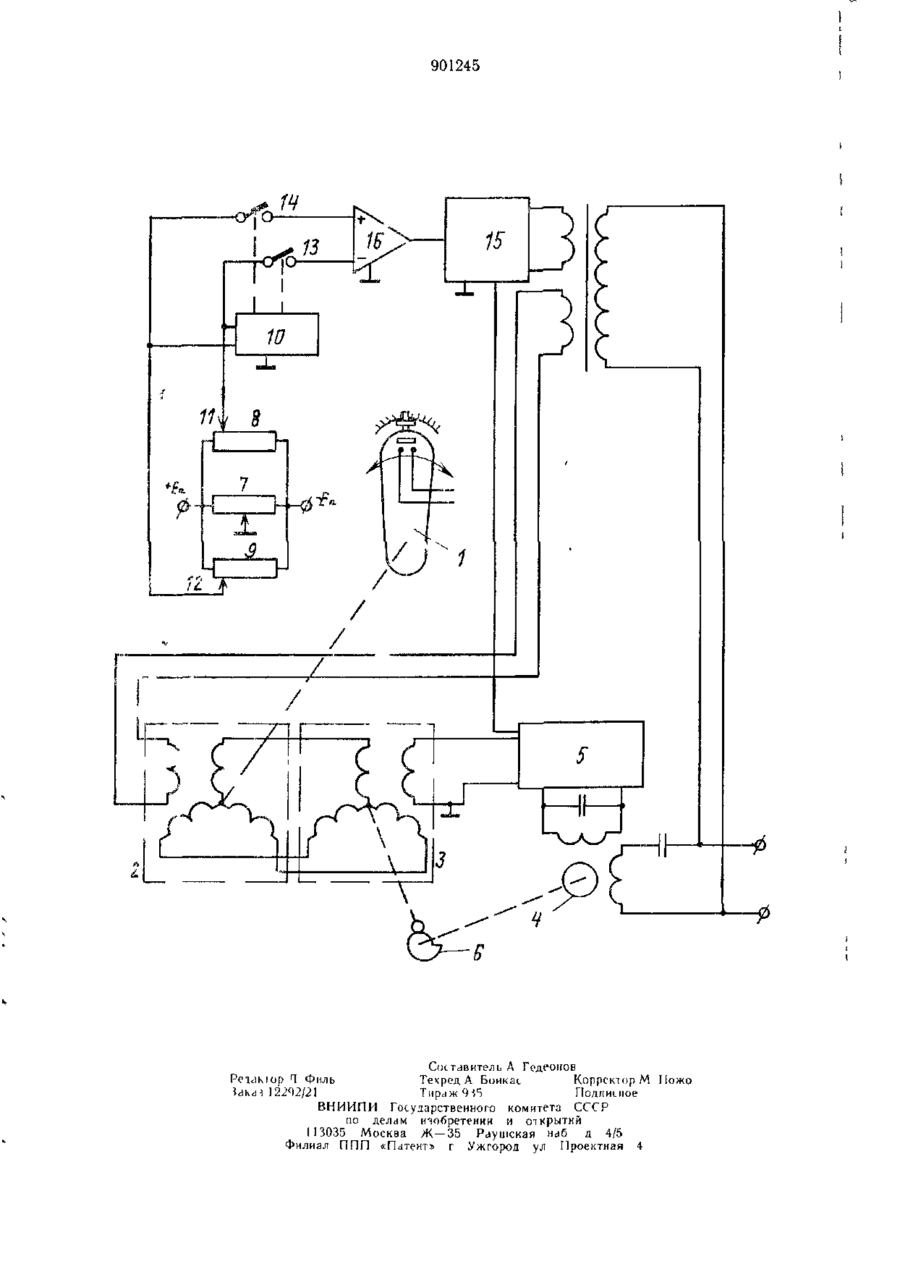
С Союз Советских Социалистических Республик A ^% 1J Ы в! WM С Ь РЕТЕНИЯ (П) 901245 К (61) Дополнительное к авт свид-ву — (22) Заявлено 30 05 80 (21) 2932827/29-11 (51) М Кл с присоединением заявки № — Государственный комитет СССР по делам изобретений и открытий (/2) Авторы изобретения (7І) Заявитель 3 В 66 С 13/42 (23) Приоритет — Опубликовано 30 01 82 Бюллетень №4 Дата опубликования описания 05 02 82 ;53) УДК 621 874 (088 8) О В Григоров, В А Коваленко, Ю А Викторов и В Н Савченко Харьковский ордена Ленина политехнический институт им В И Ленина (54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГИДРОПРИВОДАМИ МЕХАНИЗМОВ ПЕРЕДВИЖЕНИЯ КРАНА МОСТОВОГО ТИПА \ Изобретение относится к подьемно-траневым элементом, вход которого подсоединен портному машиностроению, а именно к уст к выходам мостовой схемы, ключами, упройствам для управления гидроприводами равляющие входы которых соединены с вымеханизмов крана, и может быть исполь ходами порогового элемента, и модулятозовано для управления механизмами пере ром, входы которого через ключи гтодсоедидвижения крана мостового типа 5 нены к выходам мосговой схемы, а выход Известно устройство для управления шдмодулятора соединен со входом усилителя роприводами механизмов передвижения краНа чертеже изображена функциональная на мостового типа, содержащее командосхема устройства аппарат, кинематически связанный с сельУстройство для управления гидропривосин датчиком, который электрически сое- 1 0 дами механизмов передвижения крана мосдинен с сельсин-приемником, а также ис тового типа содержит командоаппарат 1, полнительный двигатель, который через кинематически связанный с сельсин-датчиусилитель подключен к выходу сельсинком 2, который электрически соединен с приемника и через лекало кинематически сельсин-приемником 3, а также исполнисвязан с ротором сельсин-приемника [1] тельный двигатель 4, который через уснНедостатком известного устройства яв- 15 литель 5 подключен к выходу сельсинляется сравнительно низкое качество управприемника 3 и через лекало 6 кинематичесления ки связан с ротором сельсин-приемника 3 Цель изобретения — повышение качестЗадатчик 7 давления в гидроприводе и ва управления за счет уменьшения динами датчики 8 и 9 давления в гидроприводе подческих ударов ключены вместе по мостовой схеме Вход Указанная цель достигается тем, что уст- 20 порогового элемента ]0 подключен к выхоройство снабжено за датчиком давления в дам 11 и 12 мостовой схемы Ключи 13 гидроприводе, датчиками давления в гидрои 14 подсоединены между выходами 11 приводе, подключенными вместе с задатчии 12 мостовой схемы и модулятором 15 ком давления по мостовой схеме, порогоУправляющие входы ключей 13 и 14 (не 901245 показаны) соединены с выходами порогового элемента 10 Вход модулятора 15 подсоединен ко входу усилителя 5 Устройство может быть снабжено операционным усили гелем 16, включенным между ключами 13 и 14 и входом модулятора І 5 Устройство для управления гидроприводами механизмов передвижения крана мостового типа работает следующим образом. При отклонении ручки командоаппарата 1 поворачивается связанный с ней ротор сельсин-датчика 2, что приводит к рассогла- 1 С сованию положений роюров сельсин-датчика 2 и сельсин-приемника 3. На входе усилителя 5 возникает сні нал. Усиленный в усилителе 5 сигнал подается на обмотки управления двиїателя 4, приводя его во вращение Возникающее при этом в гидросисісме давление в зависимости от направления вращения двигателя 4 вызывает разбалансировку напряжения в схеме датчика 8 давления или в схеме датчика 9 давления, обеспечивая тем самым обратную 2 0 связь между частотой вращения двиїателя 4 и изменением давления в гидросистеме. правление своего вращения. С помощью лекала 6 угол рассогласования между роторами сельсин-датчика 2 и сельсин-приемника 3 сводится до нуля. При этом элемент 10 размыкает ключ 13 или 14, и кран двигается с заданной скоростью и в заданном направлении. Наличие обратной связи между частотой вращения двигателя и измерением давления в гидросистеме позволяет благодаря введению датчиков давления и задающего устройства, установленных в гидросистеме крана, увеличить долговечность и надежность крана. Формула изобретения Устройство для управления гидроприводами механизмов передвижения крана мостовою типа, содержащее командоапарат, кинематически связанный с сельсин-датчиком, который электрически соединен с сельсин-приемником, а также исполнительный двигатель, который через усилитель подключен к выходу сельсин-приемника и через лекало кинематически связан с ротором Задающее устройство 7 определяет оптисельсин-приемника, отличающееся тем, мальное давление в гидросистеме, увеличение давления в гидросистеме приводит к 2 S что, с целью повышения качества управления за счет уменьшения динамических удауменьшению напряжения, снимаемого с ров, оно снабжено задатчиком давления в моста. При уменьшении напряжения до гидроприводе, датчиками давления в гидронуля, т е. когда давление в системе достиприводе, подключенными вместе с задатчигает оптимального значения, срабатывает ком давления по мостовой схеме, порогопороговый элемент 10, замыкающий ключ 13 и 14 соогвеїственно, разрешая тем самым 30 вым элементом, вход которого подсоединен к выходам мостовой схемы, ключами, прохождение сигнала с укзанного моста управляющие входы которых соединены с на модулятор 15 через операционный уси выходами порогового элемента, и модулялитель 16. Операционный усилитель 16 уси тором, входы которого через ключи подливает полученный сигнал и с соответствующей полярностью подает его на модуля- 35 соединены к выходам мостовой схемы, а выход модулятора соединен со входом \еитор 15, где он преобразуется в напряжение лителя с промышленной частотой (50 Гц) и подается на усилитель 5 Источники информации, Усиленный в усили геле 5 сигнал попринятые во внимание при экспертизе дается на обмотки управления двигатели 4, 1 Авторское свидетельство СССР который в зависимости от полярности и ве№ 424802, кл В 66 С 13/42, 17.09.71 (проличины сигнала изменяе-т скорость или на тотип) . 901245 С
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of hydraulic drives of the mechanisms of movement of bridge type crane
Автори англійськоюHryhorov Otto Volodymyrovych, Kovalenko Valentyn Oleksandrovych, Viktorov Yurii Oleksandrovych, Savchenko Valerii Mykolaiovych
Назва патенту російськоюУстройство для управления гидроприводами механизмов передвижения крана мостового типа
Автори російськоюГригоров Отто Владимирович, Коваленко Валентин Александрович, Викторов Юрий Александрович, Савченко Валерий Николаевич
МПК / Мітки
МПК: B66C 13/18
Мітки: типу, пересування, пристрій, мостового, приводами, механізмів, керування, гідравлічними, крану
Код посилання
<a href="https://ua.patents.su/4-24103-pristrijj-dlya-keruvannya-gidravlichnimi-privodami-mekhanizmiv-peresuvannya-kranu-mostovogo-tipu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для керування гідравлічними приводами механізмів пересування крану мостового типу</a>
Пристрій для керування гідравлічними приводами механізмів пересування крану мостового типу
Номер патенту: 24109
Опубліковано: 31.08.1998
Автори: Григоров Отто Володимирович, Коваленко Валентин Олександрович, Вікторов Юрій Олександрович, Савченко Валерій Миколайович
МПК: B66C 9/00, B66C 13/18
Мітки: пересування, гідравлічними, механізмів, крану, керування, мостового, пристрій, типу, приводами
Формула / Реферат:
Формула изобретения.Устройство для управления гидроприводами механизмов передвижения крана мостового типа, содержащее командоаппарат, кинематически соединенный с сельсин-датчиком, сельсин-приемники, электрически связанные через усилители с исполнительными двигателями, кинематически соединенными через лекала с роторами сельсин-приемников, отличающееся тем, что, с целью повышения точности синхронизации механизмов передвижения, оно...
Пристрій для підводу енергії до вантажного візка крану мостового типу
Номер патенту: 4504
Опубліковано: 27.12.1994
Автор: Кролюк Жорж Захарович
МПК: H02G 11/00, B66C 13/00
Мітки: візка, типу, пристрій, підводу, вантажного, енергії, мостового, крану
Формула / Реферат:
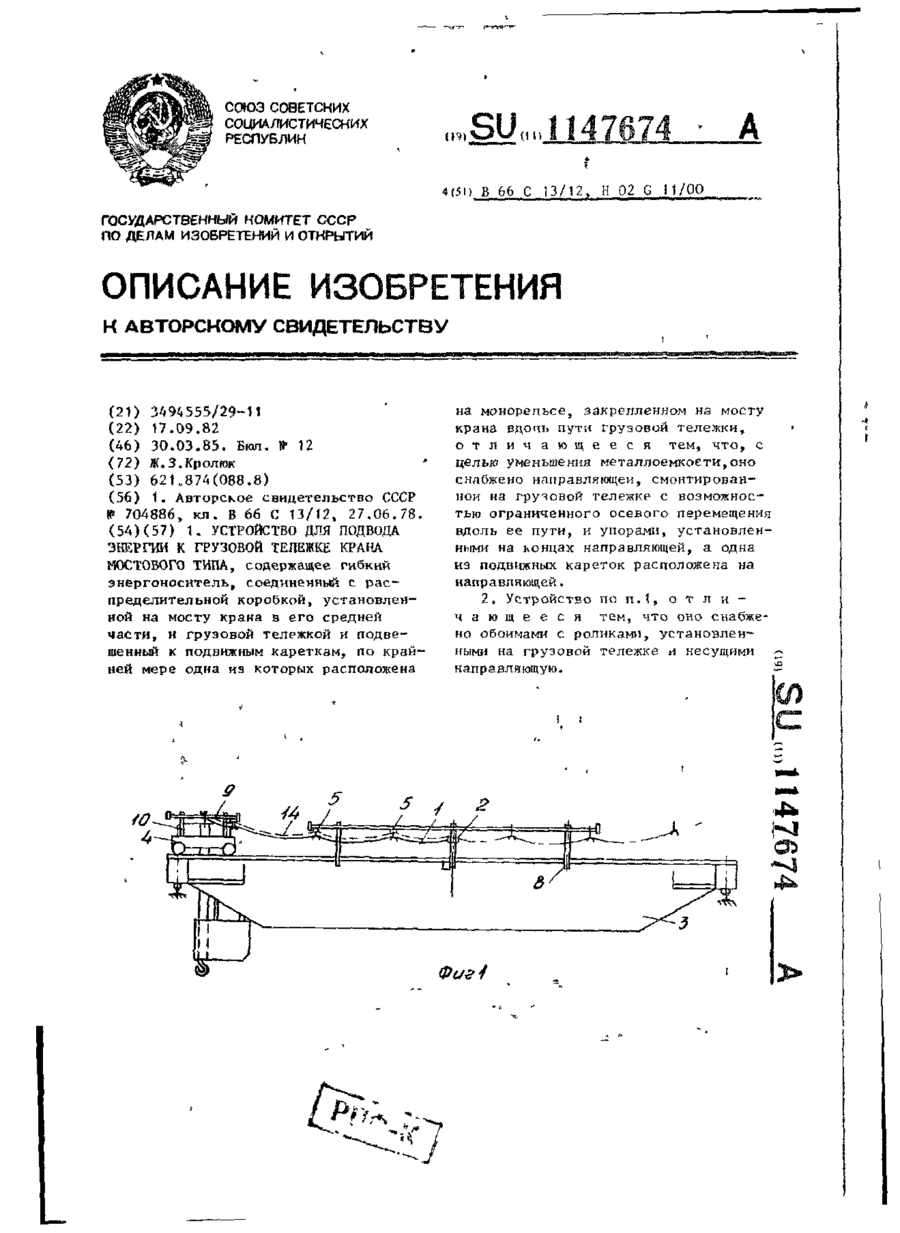
1. Устройство для подвода энергии к грузовой тележке крана мостового типа, содержащее гибкий энергоноситель, соединенный с распределительной коробкой, установленной на мосту крана в его средней части, и грузовой тележкой и подвешенный к подвижным кареткам, по крайней мере одна из которых расположена на монорельсе, закрепленном на мосту крана вдоль пути грузовой тележки, отличающееся тем, что, с целью уменьшения металлоемкости, оно...
Вантажний візок мостового крану
Номер патенту: 4502
Опубліковано: 27.12.1994
Автори: Кролюк Жорж Захарович, Тарасов Геннадій Іванович, Коляда Володимир Іванович
МПК: B66C 11/00
Мітки: вантажний, крану, візок, мостового
Формула / Реферат:
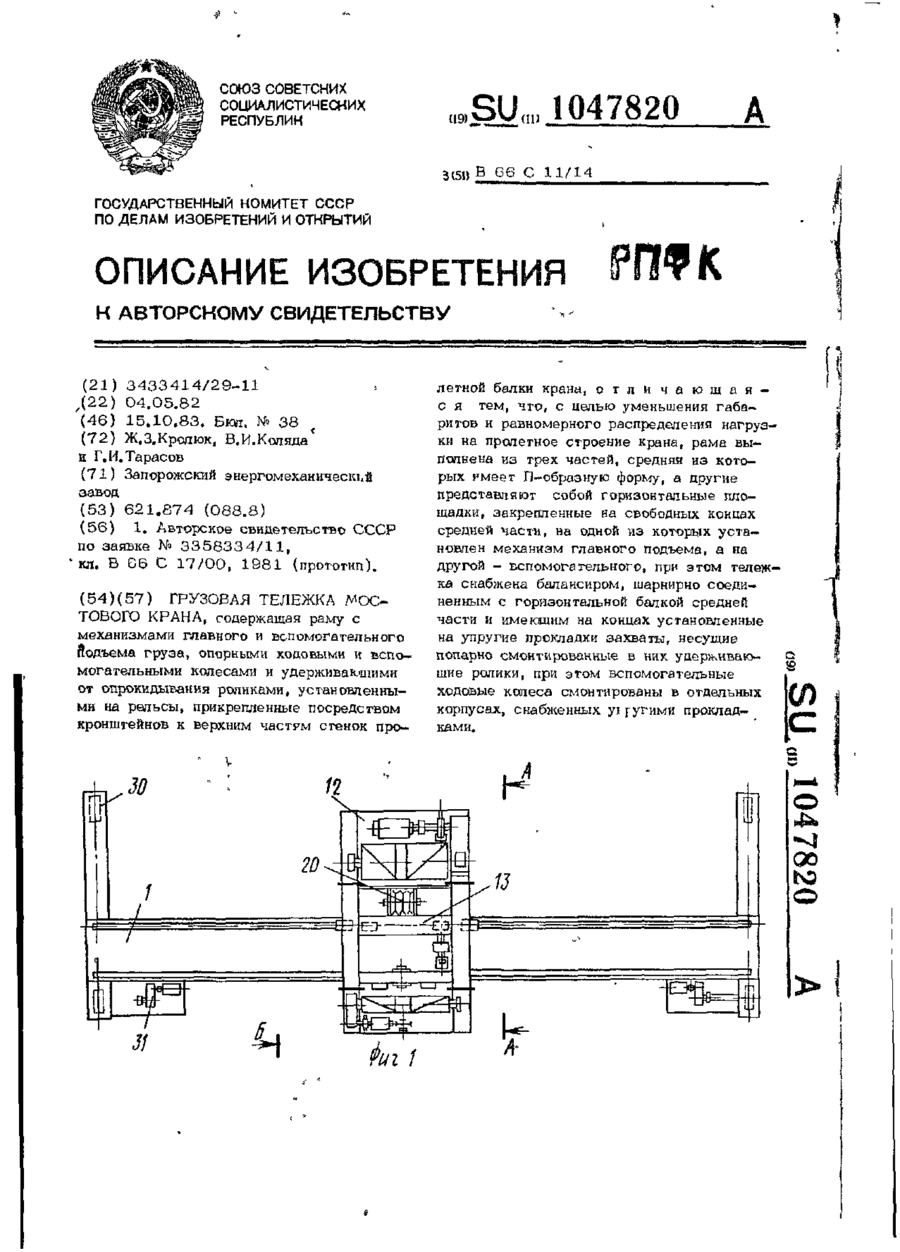
Грузовая тележка мостового крана, содержащая раму с механизмами главного и вспомогательного подъема груза, опорными ходовыми и вспомогательными колесами и удерживающими от опрокидывания роликами, установленными на рельсы, прикрепленные посредством кронштейнов к верхним частям стенок пролетной балки крана, отличающаяся тем, что, с целью уменьшения габаритов и равномерного распределения нагрузки на пролетное строение крана, рама выполнена из...
Вантажний візок крана мостового типу
Номер патенту: 4350
Опубліковано: 27.12.1994
Автори: Бик Аркадій Рувимович, Філь Леонід Андрійович, Олімпієв Аркадій Григорович
МПК: B66C 7/00, B66C 11/00
Мітки: вантажний, типу, візок, мостового, крана
Формула / Реферат:
1. Грузовая тележка крана мостового типа, содержащая связанные между собой опорную часть, включающую продольные балки с установленными в них катками механизма передвижения, раму грузоподъемного механизма, которая смещена вниз относительно опорной части, отличающаяся тем, что она содержит по крайней мере две пары S-образных кронштейнов, торцы верхних горизонтальных полок которых жестко соединены с продольными балками, а нижние торцы...
Консольний візок мостового однобалочного крану
Номер патенту: 4505
Опубліковано: 27.12.1994
Автор: Кролюк Жорж Захарович
МПК: B66C 17/00
Мітки: візок, однобалочного, крану, мостового, консольний
Формула / Реферат:
1. Консольная тележка мостового однобалочного крана, содержащая смонтированные на раме ходовые колеса для опирання на ходовой рельс моста крана, упорные ролики для взаимодействия с нижней поверхностью головки другого рельса моста крана и механизмы главного и вспомогательного подъемов с нарезными барабанами, их приводами и грузовыми канатными подвесками, отличающаяся тем, что, с целью повышения надежности путем уменьшения нагрузки на...
Попередній патент: Пристрій для вимірювання кута наклону вантажного канату
Наступний патент: Маневровий локомотив
Випадковий патент: Оптоелектронний логічний елемент і-ні