Маніпулятор станів гарячої прокатки
Номер патенту: 30457
Опубліковано: 25.02.2008
Автори: Бобух Олексій Іванович, Бобух Іван Олексійович, Федоренко Людмила Миколаївна
Формула / Реферат
Маніпулятор прокатного стана, що містить установлені по обидві сторони від осі прокатки лінійки, кожна з яких з’єднана за допомогою шарнірних вузлів із приводними штангами, механізми сприйняття зусиль, осі яких установлені в лінійках, а ролики розміщені в стаціонарних напрямних з можливістю переміщення в напрямку, перпендикулярному осі прокатки, який відрізняється тим, що кожен шарнірний вузол з’єднання лінійок і штанг виконаний у вигляді вертикальної цапфи, один кінець якої з’єднаний з повзуном, а другий жорстко скріплений зі штангою, при цьому в лінійці виконані поздовжні пази, в кожному з яких розміщений повзун з можливістю взаємного переміщення, причому осі й ролики механізмів сприйняття зусиль виконані співвісними.
Текст
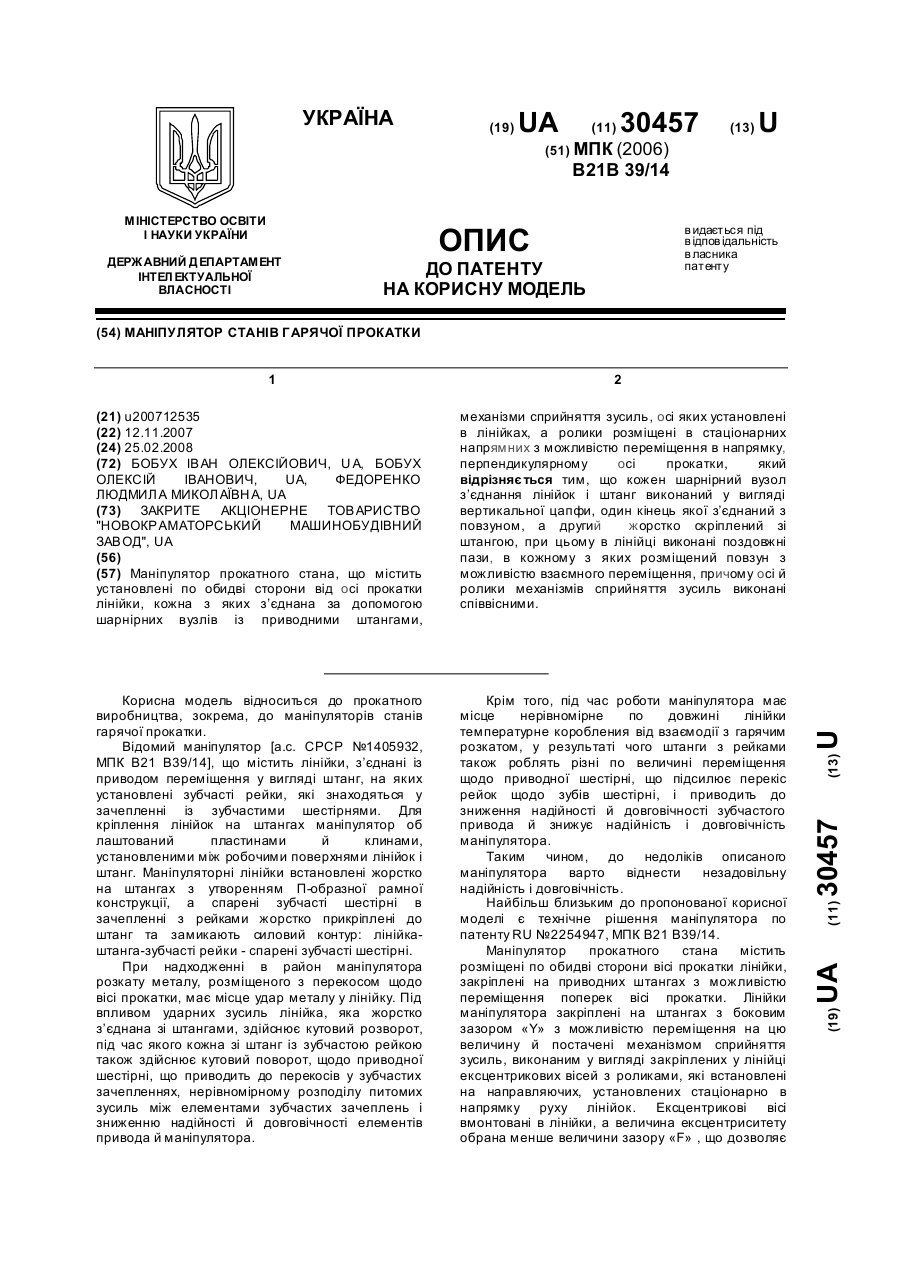
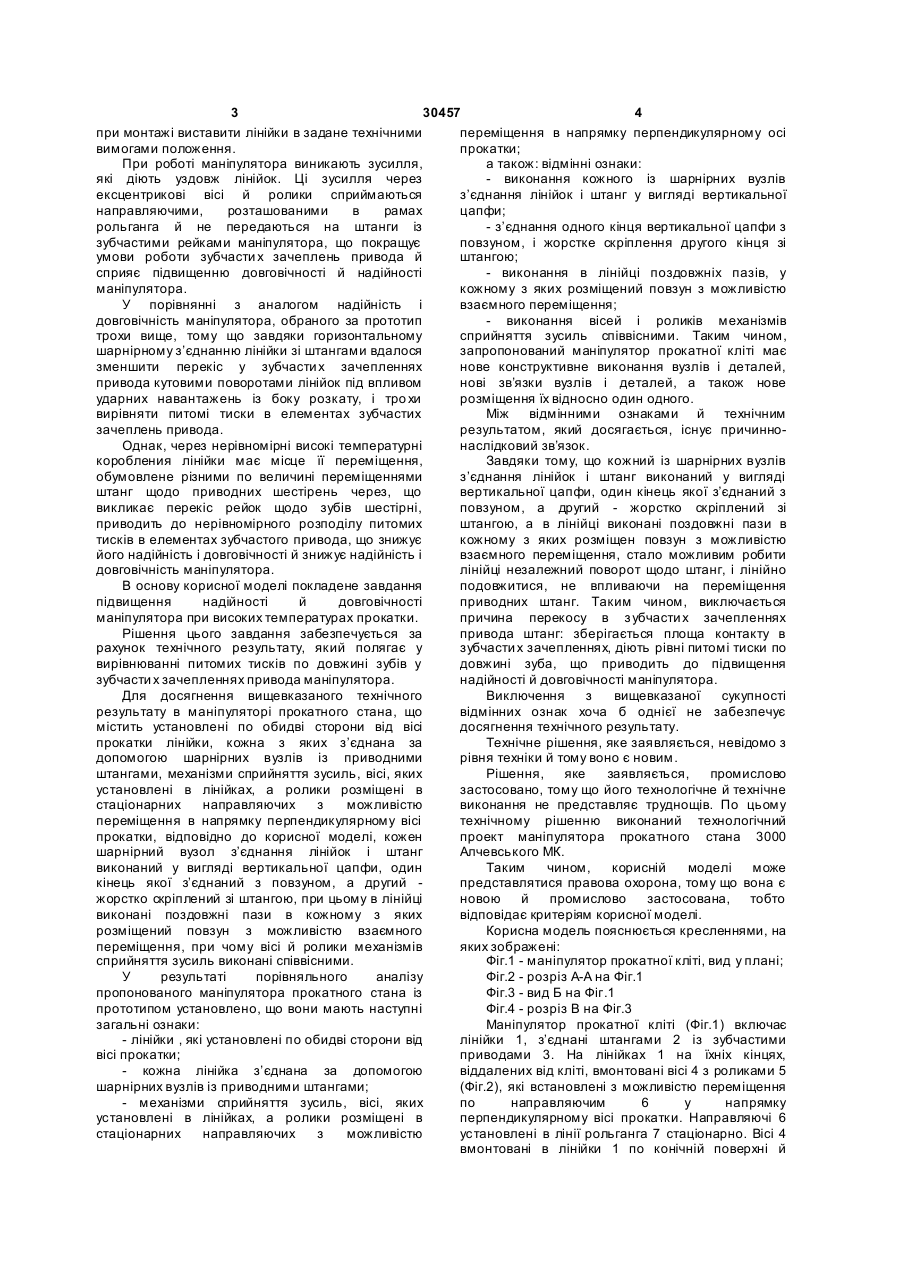
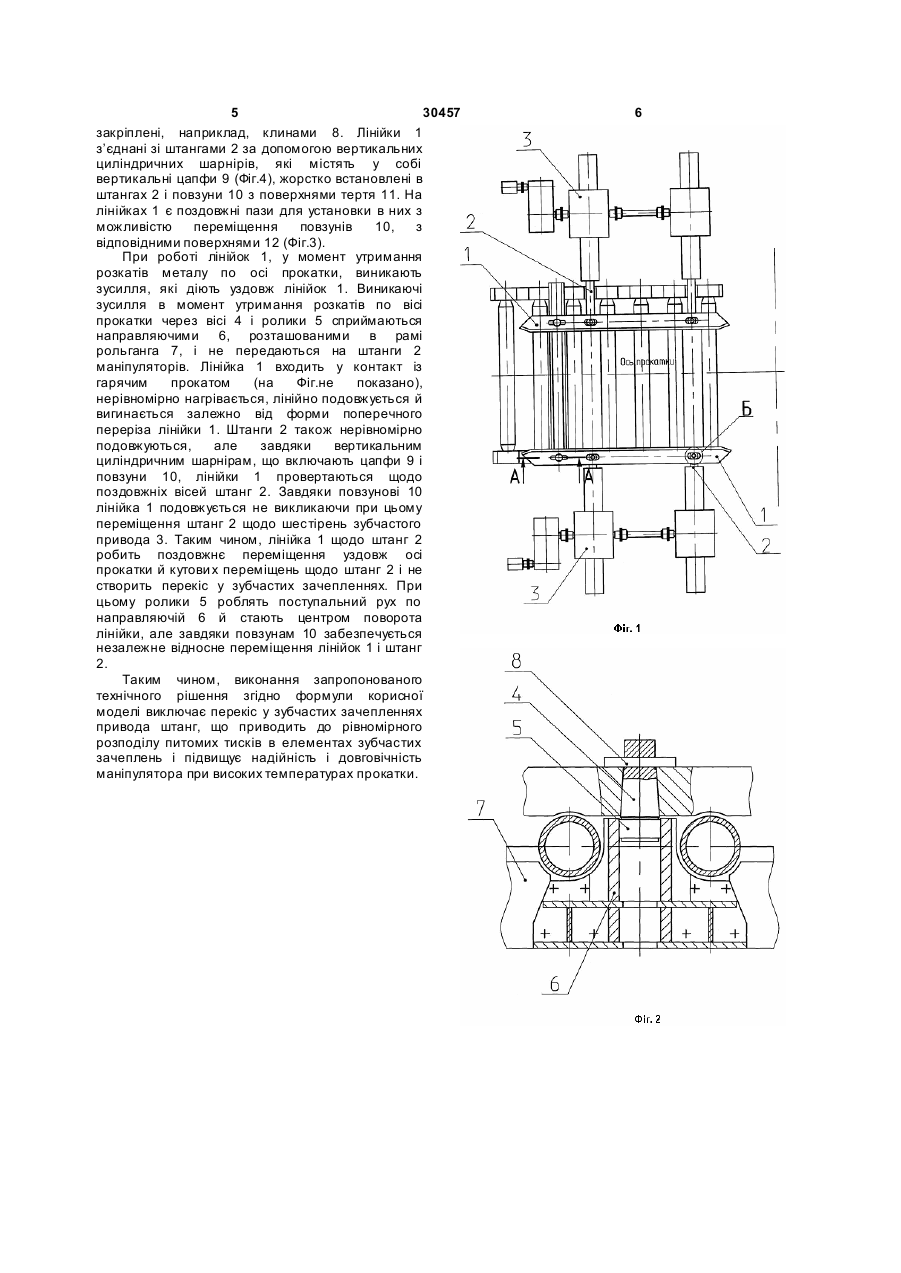
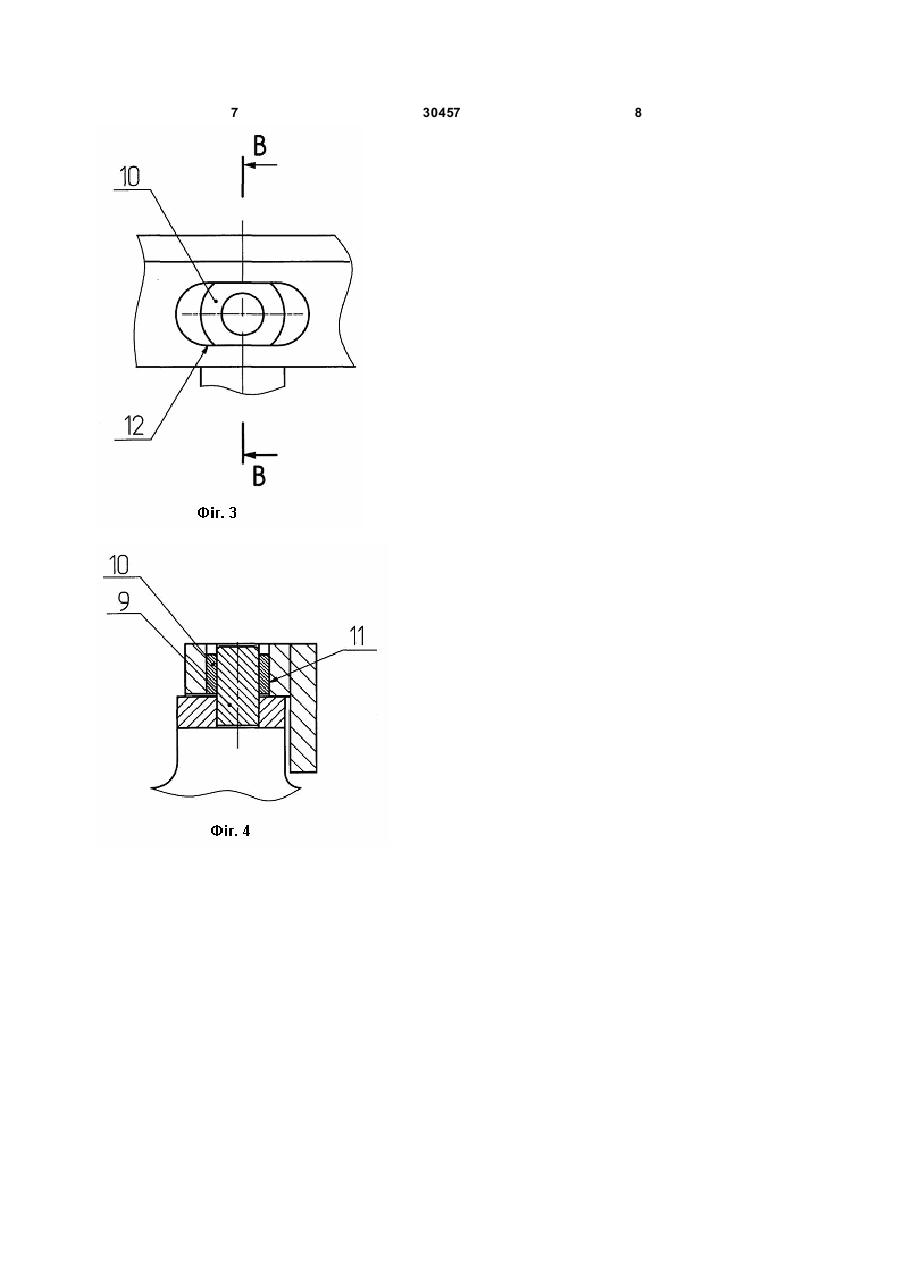
Маніпулятор прокатного стана, що містить установлені по обидві сторони від осі прокатки лінійки, кожна з яких з’єднана за допомогою шарнірних вузлів із приводними штангами, 3 30457 4 при монтажі виставити лінійки в задане технічними переміщення в напрямку перпендикулярному осі вимогами положення. прокатки; При роботі маніпулятора виникають зусилля, а також: відмінні ознаки: які діють уздовж лінійок. Ці зусилля через - виконання кожного із шарнірних вузлів ексцентрикові вісі й ролики сприймаються з’єднання лінійок і штанг у вигляді вертикальної направляючими, розташованими в рамах цапфи; рольганга й не передаються на штанги із - з’єднання одного кінця вертикальної цапфи з зубчастими рейками маніпулятора, що покращує повзуном, і жорстке скріплення другого кінця зі умови роботи зубчасти х зачеплень привода й штангою; сприяє підвищенню довговічності й надійності - виконання в лінійці поздовжніх пазів, у маніпулятора. кожному з яких розміщений повзун з можливістю У порівнянні з аналогом надійність і взаємного переміщення; довговічність маніпулятора, обраного за прототип - виконання вісей і роликів механізмів трохи вище, тому що завдяки горизонтальному сприйняття зусиль співвісними. Таким чином, шарнірному з’єднанню лінійки зі штангами вдалося запропонований маніпулятор прокатної кліті має зменшити перекіс у зубчасти х зачепленнях нове конструктивне виконання вузлів і деталей, привода кутовими поворотами лінійок під впливом нові зв’язки вузлів і деталей, а також нове ударних навантажень із боку розкату, і тро хи розміщення їх відносно один одного. вирівняти питомі тиски в елементах зубчастих Між відмінними ознаками й технічним зачеплень привода. результатом, який досягається, існує причинноОднак, через нерівномірні високі температурні наслідковий зв’язок. коробления лінійки має місце її переміщення, Завдяки тому, що кожний із шарнірних вузлів обумовлене різними по величині переміщеннями з’єднання лінійок і штанг виконаний у вигляді штанг щодо приводних шестірень через, що вертикальної цапфи, один кінець якої з’єднаний з викликає перекіс рейок щодо зубів шестірні, повзуном, а другий - жорстко скріплений зі приводить до нерівномірного розподілу питомих штангою, а в лінійці виконані поздовжні пази в тисків в елементах зубчастого привода, що знижує кожному з яких розміщен повзун з можливістю його надійність і довговічності й знижує надійність і взаємного переміщення, стало можливим робити довговічність маніпулятора. лінійці незалежний поворот щодо штанг, і лінійно В основу корисної моделі покладене завдання подовжитися, не впливаючи на переміщення підвищення надійності й довговічності приводних штанг. Таким чином, виключається маніпулятора при високих температурах прокатки. причина перекосу в з убчасти х зачепленнях Рішення цього завдання забезпечується за привода штанг: зберігається площа контакту в рахунок технічного результату, який полягає у зубчасти х зачепленнях, діють рівні питомі тиски по вирівнюванні питомих тисків по довжині зубів у довжині зуба, що приводить до підвищення зубчасти х зачепленнях привода маніпулятора. надійності й довговічності маніпулятора. Для досягнення вищевказаного технічного Виключення з вищевказаної сукупності результату в маніпуляторі прокатного стана, що відмінних ознак хоча б однієї не забезпечує містить установлені по обидві сторони від вісі досягнення технічного результату. прокатки лінійки, кожна з яких з’єднана за Технічне рішення, яке заявляється, невідомо з допомогою шарнірних вузлів із приводними рівня техніки й тому воно є новим. штангами, механізми сприйняття зусиль, вісі, яких Рішення, яке заявляється, промислово установлені в лінійках, а ролики розміщені в застосовано, тому що його технологічне й технічне стаціонарних направляючих з можливістю виконання не представляє труднощів. По цьому переміщення в напрямку перпендикулярному вісі технічному рішенню виконаний технологічний прокатки, відповідно до корисної моделі, кожен проект маніпулятора прокатного стана 3000 шарнірний вузол з’єднання лінійок і штанг Алчевського МК. виконаний у вигляді вертикальної цапфи, один Таким чином, корисній моделі може кінець якої з’єднаний з повзуном, а другий представлятися правова охорона, тому що вона є жорстко скріплений зі штангою, при цьому в лінійці новою й промислово застосована, тобто виконані поздовжні пази в кожному з яких відповідає критеріям корисної моделі. розміщений повзун з можливістю взаємного Корисна модель пояснюється кресленнями, на переміщення, при чому вісі й ролики механізмів яких зображені: сприйняття зусиль виконані співвісними. Фіг.1 - маніпулятор прокатної кліті, вид у плані; У результаті порівняльного аналізу Фіг.2 - розріз А-А на Фіг.1 пропонованого маніпулятора прокатного стана із Фіг.3 - вид Б на Фіг.1 прототипом установлено, що вони мають наступні Фіг.4 - розріз В на Фіг.3 загальні ознаки: Маніпулятор прокатної кліті (Фіг.1) включає - лінійки , які установлені по обидві сторони від лінійки 1, з’єднані штангами 2 із зубчастими вісі прокатки; приводами 3. На лінійках 1 на їхніх кінцях, - кожна лінійка з’єднана за допомогою віддалених від кліті, вмонтовані вісі 4 з роликами 5 шарнірних вузлів із приводними штангами; (Фіг.2), які встановлені з можливістю переміщення - механізми сприйняття зусиль, вісі, яких по направляючим 6 у напрямку установлені в лінійках, а ролики розміщені в перпендикулярному вісі прокатки. Направляючі 6 стаціонарних направляючих з можливістю установлені в лінії рольганга 7 стаціонарно. Вісі 4 вмонтовані в лінійки 1 по конічній поверхні й 5 30457 закріплені, наприклад, клинами 8. Лінійки 1 з’єднані зі штангами 2 за допомогою вертикальних циліндричних шарнірів, які містять у собі вертикальні цапфи 9 (Фіг.4), жорстко встановлені в штангах 2 і повзуни 10 з поверхнями тертя 11. На лінійках 1 є поздовжні пази для установки в них з можливістю переміщення повзунів 10, з відповідними поверхнями 12 (Фіг.3). При роботі лінійок 1, у момент утримання розкатів металу по осі прокатки, виникають зусилля, які діють уздовж лінійок 1. Виникаючі зусилля в момент утримання розкатів по вісі прокатки через вісі 4 і ролики 5 сприймаються направляючими 6, розташованими в рамі рольганга 7, і не передаються на штанги 2 маніпуляторів. Лінійка 1 входить у контакт із гарячим прокатом (на Фіг.не показано), нерівномірно нагрівається, лінійно подовжується й вигинається залежно від форми поперечного переріза лінійки 1. Штанги 2 також нерівномірно подовжуються, але завдяки вертикальним циліндричним шарнірам, що включають цапфи 9 і повзуни 10, лінійки 1 провертаються щодо поздовжніх вісей штанг 2. Завдяки повзунові 10 лінійка 1 подовжується не викликаючи при цьому переміщення штанг 2 щодо шестірень зубчастого привода 3. Таким чином, лінійка 1 щодо штанг 2 робить поздовжнє переміщення уздовж осі прокатки й кутови х переміщень щодо штанг 2 і не створить перекіс у зубчастих зачепленнях. При цьому ролики 5 роблять поступальний рух по направляючій 6 й стають центром поворота лінійки, але завдяки повзунам 10 забезпечується незалежне відносне переміщення лінійок 1 і штанг 2. Таким чином, виконання запропонованого технічного рішення згідно формули корисної моделі виключає перекіс у зубчастих зачепленнях привода штанг, що приводить до рівномірного розподілу питомих тисків в елементах зубчастих зачеплень і підвищує надійність і довговічність маніпулятора при високих температурах прокатки. 6 7 30457 8
ДивитисяДодаткова інформація
Назва патенту англійськоюManipulator of hot rolling mills
Автори англійськоюBobukh Ivan Oleksiiovych, Bobukh Oleksii Ivanovych, Fedorenko Liudmyla Mykolaivna
Назва патенту російськоюМанипулятор станов горячей прокатки
Автори російськоюБобух Иван Алексеевич, Бобух Алексей Иванович, Федоренко Людмила Николаевна
МПК / Мітки
МПК: B21B 39/14
Мітки: гарячої, маніпулятор, прокатки, станів
Код посилання
<a href="https://ua.patents.su/4-30457-manipulyator-staniv-garyacho-prokatki.html" target="_blank" rel="follow" title="База патентів України">Маніпулятор станів гарячої прокатки</a>
Пристрій для осьового зміщення прокатних валків станів для холодної та гарячої прокатки
Номер патенту: 12310
Опубліковано: 25.12.1996
Автори: Аксель Шпренгер, Хельмут Зетцер
МПК: B21B 31/16
Мітки: станів, прокатних, осьового, холодної, пристрій, гарячої, прокатки, зміщення, валків
Формула / Реферат:
(57) 1. Устройство для осевого смещения прокатных валков станов для холодной и горячей прокатки, валки которых смонтированы своими опорными шейками в радиальных подшипниках, а одна из опорных шеек валка оснащена осевым упорным подшипником, через который устройство воздействует на валок, содержащее корпус, установленный на подушке валка во взаимодействии с торцем наружного кольца радиального подшипника а также с установленным внутри корпуса...
Спосіб гарячої прокатки штаби
Номер патенту: 60007
Опубліковано: 15.09.2003
Автори: Барабаш Андрій Володимирович, Левіна Валентина Іванівна, Стеч Володимир Станіславович, Каушанський Ігор Борисович, Савенко Юрій Євдокимович
МПК: B21B 1/30
Мітки: штаби, спосіб, гарячої, прокатки
Формула / Реферат:
Спосіб гарячої прокатки штаби, що включає прокатку сляба в чорновій групі клітей до одержання підкату, розміщення його після завершення чорнової прокатки на проміжному рольгангу, транспортування підкату до ножиць, центрування його напрямними лінійками, обрізання переднього і заднього кінців підкату і прокатку в чистовій групі клітей до одержання штаби заданої товщини, який відрізняється тим, що одночасно з центруванням напрямними лінійками...
Спосіб виробництва тонкої смуги на станах гарячої прокатки
Номер патенту: 78804
Опубліковано: 25.04.2007
Автори: Єлецьких Володимир Іванович, Стеч Володимир Станіславович, Каушанський Ігор Борисович, Барабаш Андрій Володимирович
МПК: B21C 47/02, B21B 1/26
Мітки: тонкої, прокатки, виробництва, смуги, гарячої, спосіб, станах
Формула / Реферат:
Спосіб виробництва тонкої смуги на станах гарячої прокатки, при якому здійснюють прокатку смуги в чорновій і чистовій групах клітей і її змотування шляхом захоплення кінця смуги барабаном змотувального пристрою і формуючими роликами, які встановлені відносно твірної барабана з заданим зазором, створення натягу смуги після намотування декількох витків і наступного змотування смуги на швидкості прокатки при відведених від смуги формуючих...
Спосіб гарячої прокатки
Номер патенту: 7895
Опубліковано: 26.12.1995
Автори: Абалешев Валерій Олександрович, Шум Валентин Борисович, Губайдулін Вячеслав Фуатович, Левицький Анатолій Петрович, Столба Володимір Анатолійович, Корінь Андрій Олександрович, Кукуй Давид Пенхусович
МПК: B21B 1/02
Мітки: спосіб, гарячої, прокатки
Формула / Реферат:
Способ горячей прокатки, включающий нагрев заготовки, деформацию в несколько проходов, подстуживание поверхности проката и последующую прокатку в несколько проходов, отличающийся тем, что, с целью повышения качества поверхности проката путем удаления плен, подстуживание производят на 2-10% температуры раската в предыдущем проходе, последующую прокатку осуществляют с коэффициентом трения 0,8-0,95 коэффициента трения раската в предыдущем...
Спосіб гарячої прокатки плоскої заготівки
Номер патенту: 70729
Опубліковано: 15.10.2004
Автори: Яценко Вячеслав Олександрович, Путнокі Олександр Юліусович, Мацко Сергій Володимирович, Калабухов Віктор Іванович, Вереньов Валентин Володимирович
МПК: B21B 1/26
Мітки: прокатки, заготівки, гарячої, плоскої, спосіб
Формула / Реферат:
Спосіб гарячої прокатки плоскої заготівки, що включає формування фігурного виступу на кінцях заготівки при прокатці в першій чорновій кліті, наступну прокатку в інших клітях чорнової групи, обрізку кінців розкатки і прокатку в безперервній групі клітей, який відрізняється тим, що на передній торцевій частині заготівки по всій її ширині формують фігурний виступ, переважно трикутної форми, довжиною, що дорівнює 0,05...0,15 товщини заготівки, на...
Попередній патент: Спосіб автоматичного керування процесом сушіння екстракту кави в розпилювальній сушарці
Наступний патент: Гвинтовий конвеєр з прямолінійним переміщенням крихких заготовок
Випадковий патент: Полімерна композиція холодного отвердіння