Пристрій для вимірювання прискорень на обресорених частинах рухомого складу
Номер патенту: 35358
Опубліковано: 15.03.2001
Автори: Блохін Євген Петрович, Михайленко Віталій Михайлович, Сапарова Лариса Сергійовна, Оптовець Світлана Петрівна
Формула / Реферат
Пристрій для вимірювання прискорень на обресорених частинах рухомого складу, який містить датчики прискорень, встановлені відповідно вибраним напрямкам, та який відрізняється тим, що пристрій додатково містить датчики абсолютних кутових переміщень, виходи яких сполучені зі входами узгоджуваних пристроїв, а виходи останніх сполучені з другими входами суматорів, а їх перші входи сполучені з виходами узгоджувальних пристроїв, входи яких сполучені з виходами.
Текст
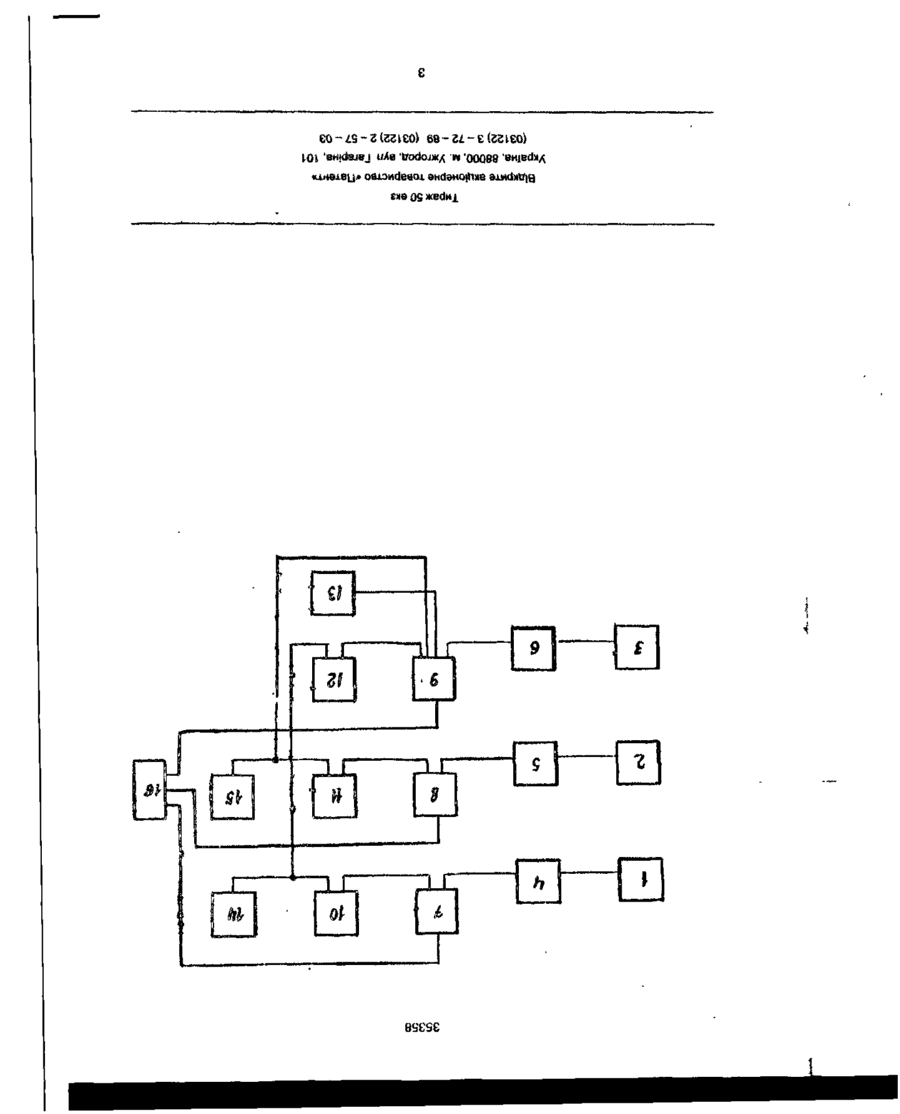
Пристрій для вимірювання прискорень на обресорених частинах рухомого складу, який містить датчики прискорень, встановлені відповідно вибраним напрямкам, та який відрізняється тим, що пристрій додатково містить датчики абсолютних кутових переміщень, виходи яких сполучені зі входами узгоджуваних пристроїв, а виходи останніх сполучені з другими входами суматорів, а їх перші входи сполучені з виходами узгоджувальних пристроїв, входи яких сполучені з виходами Винахід стосується залізничного транспорту, зокрема, оцінки динамічних (ходових) якостей рухомого складу У процесі експериментальних досліджень вимірюють лінійні прискорення окремих елементів рухомого складу, наприклад, обресорених частин При цьому прискорення, як правило, вимірюють у трьох напрямках згідно з вісями просторової системи координат: повздовжньому (X), поперечному (Y) та вертикальному (Z). Для цього датчики прискорень встановлюють на об'єкті, наприклад, на підпозі кузова залізничного вагона, орієнтуючи їх вісям відповідно системи координат. Але при русі об'єкту неминуче виникають кутові переміщення його елементів і тому традиційні вимірювання прискорень мають відносно великі погрішності. Відомо, що вимірюючи прискорення, звичайно, датчики прискорень встановлюють на кузові у зоні п'ятника або ж у середній частині кузова ("Вагоны грузовые и пассажирские. Методы испытания на прочность и ходовые качества" РД 24.050.37 95). Але у цьому випадку на датчики прискорень, крім вимірювальних прискорень діє також гравітаційне поле Землі і тому сигнал на виході датчика є сумою двох складових Одна з складових - це величина пропорційна проекції вектора прискорення земного тяжіння на вісь, яка співпадає з вимірювальною віссю датчика, який при русі об'єкту здійснює також і кутові переміщення у гравітаційному полі Землі. Таким чином, при кутових переміщеннях у фавітаційному полі Землі на виході датчика лінійних прискорень з'являється додатковий сигнал, визваний його кутовими переміщен нями. Тобто Ця друга складова і є джерелом погрішності при вимірюванні малих (0,1-0,3)д прискорень, що характерно для низькочастотних динамічних процесів, наприклад, при дослідженнях ходових якостей пасажирських вагонів. Якщо вимірювальна вісь датчика паралельна силі земного тяжіння, то величина додаткового сигналу (Uu ) визначається виразом Un = k g cos ф , де. k - чутливість датчика, g - прискорення земного тяжіння, ф - кут нахилу вимірювальної вісі датчика у вертикальній площині відносно земної поверхні. Якщо вимірювальна вісь датчика перпендикулярна вектору д, тобто знаходиться у горизонтальній площині, то величина додаткового сигналу (Ці) буде г» ю со ur> со Ml = k g Якщо транспортний засіб рухається, кутові коливання з'являються, як правило, відносно усіх трьох осей просторової системи координат. Якщо прийняти, що вісь Z спрямована вертикально паралельно силі земного тяжіння, вісь X - вздовж колії, а вісь Y - впоперек колії, то вихідний сигнал датчика, який є сумою двох складових, буде визначаться Z = 2пін + Ux + U y X = Хлін + Uy У » Уп(н + U x де: z, х, у - вихідні сигнали датчиків, встановлених вздовж осей Z, X, Y відповідно; оГ 35358 ?mr. Хлін, Упін - ДІЙСНІ ЛІНІЙНІ ПрИСКОрвННЯ ВЗДОВЖ осей Z, X, Y відповідно, Ux, Uv - сигнали, їло відповідають кутовим переміщенням датчика відносно осей х та у відповідно Таким чином, з привадених рівнянь виходить, що вихідні сигнали датчиків прискорень мають дві складові корисний сигнал, який відповідає вимірюваному прискоренню, та додатковий сигнал, що відповідає кутовим переміщенням При звичайних вимірюваннях звичайними датчиками прискорень розділити ці складові неможливо Найбільш близьким до винаходу по технічній сутності та результату, що досягається, аналогом винаходу, що заявляється, є а с. СРСР "Устройство для измерения ускорения" Ne 1670631 G 01 15/08 Пристрій складається з корпусу, в якому знаходиться інерційна маса, пружини з регулюючими гвинтами, сигналізатор прискорень, прапорець з отворами, шарнір Гука /Для більшої стійкості корпусу у вертикальному положенні дно корпусу виконано із матеріалу, загальна маса якого порівняна з масою інерційного тіла. Корпус знаходиться у посудині, що заповнена рідиною, і є поплавком Це тримає корпус і також інерційне тіло у вертикальному положенні відносно горизонту Землі Корпус з'єднується з дном посудини за допомогою кульового шарніра, що знаходиться у центрі дна корпуса Принцип дії пристрою вимірювання прискорень засновано на перетворенні сили, що виникає при прискореному русі інерційного тіла у пропорційне переміщення прапорця Однак, у зв'язку з тим, що корпус пристрою дпя вимірювання прискорень знаходиться у посудині з рідиною і його зафіксовано за допомогою шарніру, він завжди підтримується у строго вертикальному положенні за рахунок виштовхуючої сили рідини Недол'ком цього пристрою є погрішність, зв'язана з нахилом корпусу у процесі руху об'єкту, на якому закріплено пристрій для вимірювання прискорень ЯкЩо виштовхуюча сила, що діє на корпус, буде більш сили ваги, то корпус буде дійсно знаходитись у вертикальному положенні, але при цьому ця система є маятником, який може коливатися відносно шарніру При цьому довжина маятника дорівнює відстані від точки підвішування шарніру до центра мас корпусу Взагалі власна частота ю такої системи визначається виразом со = -ftngV I, де m - маса маятнику, І - довжина маятнику, І момент інерції маятника У нашому випадку де Р - виштовхуюча сила Якщо вага корпусу та виштовхуюча сила однакові, то коливання будуть відсутні, але при цьому корпус втратить стійкість, і навіть при невеликому нахил? центр ваги корпуса та центр ваги витиснуто» рідини аже не будуть знаходиться на одній вертикалі Суть запропонованого винаходу міститься у тому, що пристрій для вимірювання прискорень обресорених частин рухомого складу містить як датчики прискорень, за допомогою яких вимірюють прискорення, так і датчики абсолютних кутових переміщень, сигнал яких використовується дпя компенсації погрішностей, викликаних кутовими переміщеннями датчиків На фіг приведена функціональна схема запропонованого пристрою Пристрій складається з датчиків прискорень 1, 2, 3, встановлених паралельно вісям Z, X, Y просторової системи координат на обресореніи частині рухомого складу, виходи яких з'єднані з входами узгоджувальних пристроїв 4, 5, 6 Входи узгоджувальних пристроїв сполучені з входами суматорів 7, 8. 9 На обресореніи частині рухомого складу встановлені також датчики абсолютних кутових переміщень 14, 15, виходи яких сполучені з входами узгоджувальних пристроїв 10, 11, 12, 13, а виходи останніх сполучені з другими та третіми входами суматорів Виходи суматорів сполучені з входами реєстратора 16 Пристрій працює так Сигнал з виходу датчика прискорень 1, встановленого на обресореніи частині рухомого складу у поздовжньому напрямку (X), надходить на вхід узгоджувального пристрою 4, де сигнал підсилюється і з виходу датчика 14 абсолютного кута переміщення відносно вісі Y надходить на вхід узгоджувального пристрою 10, а з його виходу на другий вхід суматора 7. З виходу суматора відкоригований сигнал відповідний лінійному прискоренню в напрямку X надходить на вхід реєстора 16. Сигнал з виходу датчика прискорення 2, встановленого у поперечному напрямку (Y) на обресореніи частині рухомого складу, надходить на вхід узгоджувального пристрою 5, який працює аналогічно пристрою 4, з його виходу сигнал надходить на перший вхід суматора 8, а на $ого другий вхід надходить сигнал з виходу узгоджувального пристрою 11, вхід якого сполучено з виходом датчика 15 абсолютного переміщення кута відносно вісі Y 3 виходу суматора сигнал надходить на вхід пристрою, що реєструє, 16 Сигнал з виходу датчика прискорень 3, встановленого на обресореніи частині у вертикального напрямку (Z) надходить на вхід узгоджувального пристрою б, а з його виходу на перший вхід суматора 9 На другий і третій входи суматора 9 надходять сигнали з виходів узгоджувальних пристроїв 11 та 12. входи яких сполучено з виходами датчиків 14 та 15 абсолютних кутових переміщень Сигнал з виходу суматора 9 є пропорційним тільки лінійному вертикальному прискоренню 3 виходу суматора сигнал надходить на вхід пристрою, що реєструє, 16. Технічний результат заявленого* винаходу полягає в можливості вимірювань тільки лінійних прискорень Запропонований пристрій може бути без додаткових затрат використаний всюди, де треба вимірювати прискорення на обресорених частинах залізничного рухомого складу. \,Ql 'gHi w '00088 oaiondeeoi ансідноіШе axwdMtfjQ ЕЯ9 OS ЖBdИІ 9 z\ 83Є9Є
ДивитисяДодаткова інформація
Назва патенту англійськоюAppliance for measurement of accelerations on equipped with springs sections of mobile stock
Автори англійськоюBlokhin Yevhen Petrovych, Mykhailenko Vitalii Mykhailovych, Optovets Svitlana Petrivna, Saparova Larysa Serhiivna
Назва патенту російськоюУстройство для измерения ускорений на обрессоренных частях подвижного состава
Автори російськоюБлохин Евгений Петрович, Михайленко Виталий Михайлович, Оптовец Светлана Петровна, Сапарова Лариса Сергеевна
МПК / Мітки
МПК: G01P 15/08
Мітки: обресорених, складу, пристрій, прискорень, частинах, рухомого, вимірювання
Код посилання
<a href="https://ua.patents.su/4-35358-pristrijj-dlya-vimiryuvannya-priskoren-na-obresorenikh-chastinakh-rukhomogo-skladu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання прискорень на обресорених частинах рухомого складу</a>
Спосіб вимірювання прискорень на обресорених частинах рухомого складу
Номер патенту: 32264
Опубліковано: 15.12.2000
Автори: Мямлін Сергій Віталійович, Оптовець Світлана Петрівна, Михайленко Віталій Михайлович, Сапарова Лариса Сергійовна, Блохін Євген Петрович
МПК: G01P 15/00, B61C 11/00
Мітки: складу, прискорень, обресорених, частинах, вимірювання, спосіб, рухомого
Текст:
...буде Uj_=k- g- sin ф. Якщо транспортний засіб рухається, кутові коливання, як правило, з'являються відносно усіх трьох вісей просторової системи координат. Якщо прийняти, що вісь Z спрямована вертикально, паралельно силі земного тяжіння, вісь X - спрямована вздовж шляху руху, вісь Y - упоперек шляху, то вихідний сигнал датчика, вимірю вальна вісь якого спрямована вздовж вісі Z, є сумою двох сигналів, сигналу відповідного лінійному...
Пристрій для закріплення рухомого залізничного складу
Номер патенту: 28603
Опубліковано: 16.10.2000
Автори: Спіцин Василь Олександрович, Єрмак Сергій Миколайович, Іончиков Анатолій Миколайович, Потапов Ігор Ілліч, Безверхій Віталій Григорович
МПК: B61D 7/16
Мітки: залізничного, закріплення, рухомого, складу, пристрій
Формула / Реферат:
Пристрій для закріплення рухомого залізничного складу, що містить раму, змонтовану в колії поміж рейками, рухому каретку з пружинними блоками, пару закріплюючих балок, кожна з яких шарнірно з¢єднана за допомогою двох тяг з пружинними блоками рухомої каретки, механізм підвіски закріплюючих балок, включаючий вигнуті важелі та кронштейни, шарнірно з¢єднані між собою, датчик положення залізничного складу, блок обмеження повздовжнього...
Пристрій спіцина для закріплення рухомого залізничного складу
Номер патенту: 32031
Опубліковано: 15.12.2000
Автори: Іончиков Анатолій Миколайович, Спіцин Василь Олександрович, Шевчук Сергій Олександрович
МПК: B61K 7/00
Мітки: закріплення, складу, рухомого, залізничного, пристрій, спіцина
Текст:
...пружинних блоків 18,19 та забезпечених ноздовжниш 20,21 та ноперечними 22 на п>авляючими пазами, в одній площині з якими закріплені попарнр й симетрично нерухомі клини 23,24 з направляючими пластинами 25. В поздовж них направляючих пазах 20,21 та направляючих пластинах 25 розміщені рухомі клини 26,27 розпірного механізму, на яких закріплені ВІДЛОВІДЛО гайки 28,29, що мають одна ліву, другд праву різьбі* та взаємодіючі з й ВІДПОВІДНИМИ...
Автоматизований пристрій для закріплення рухомого складу залізничного транспорту
Номер патенту: 14982
Опубліковано: 04.03.1997
Автори: Іончиков Анатолій Миколайович, Літвінцев Микола Олексійович, Новіков Григорій Іванович, Шевченко Віктор Михайлович, Безверхій Віталій Григорович, Каплун Микола Дмитрович, Потапов Ігор Ільіч
МПК: B61K 7/00
Мітки: рухомого, автоматизований, залізничного, складу, закріплення, транспорту, пристрій
Формула / Реферат:
1 Автоматизированное устройство для закрепления подвижного железнодорожного состава, включающее привод с блоком управления и источником литания, датчик положения железнодорожного состава с контактными элементами, датчик положения подвижного закрепляющего модуля с контактными элементами и ограничителями хода и блок сигнализации с другим источником питания, отличающееся тем, что блок управления приводом включает размыкающий ключевой...
Переносний пристрій для закріплення рухомого складу на залізничних коліях
Номер патенту: 3075
Опубліковано: 26.12.1994
Автори: Шумейко Василь Андрійович, Чеботарьов Григорій Аврамович
МПК: B61K 7/00
Мітки: рухомого, пристрій, коліях, складу, закріплення, залізничних, переносний
Формула / Реферат:
Переносное устройство для закрепления состава на железнодорожных путях, содержащее установленный на рельсы колесный упор, несущий рычаги для охвата одними концами головку рельса, винт, резьбовым соединением связанный с другим концом одного из рычагов, и механизм поджатия указанных одних концов рычагов к рельсу, включающий в себя штангу для взаимодействия с колесом вагона, отличающееся тем, что рычаги шарнирно закреплены средней частью на...
Попередній патент: Спосіб лікування больового синдрому обличчя
Наступний патент: Автоцистерна
Випадковий патент: Лікарський препарат знеболювальної та спазмолітичної дії "промедол"