Спосіб автоматичного керування об’єктом


Формула / Реферат
Спосіб автоматичного керування об'єктом, за яким формують сигнал керувальної дії, пропорційний сумі абсолютних значень сигналів розгалуження і швидкості розгалуження, фіксують і запам'ятовують величину сигналу розгалуження і величину сигналу швидкості розгалуження при нульовому значенні сигналу розгалуження, який відрізняється тим, що при формуванні сигналу керувальної дії полярність останнього вибирають протилежною полярності сигналу швидкості розгалуження.
Текст
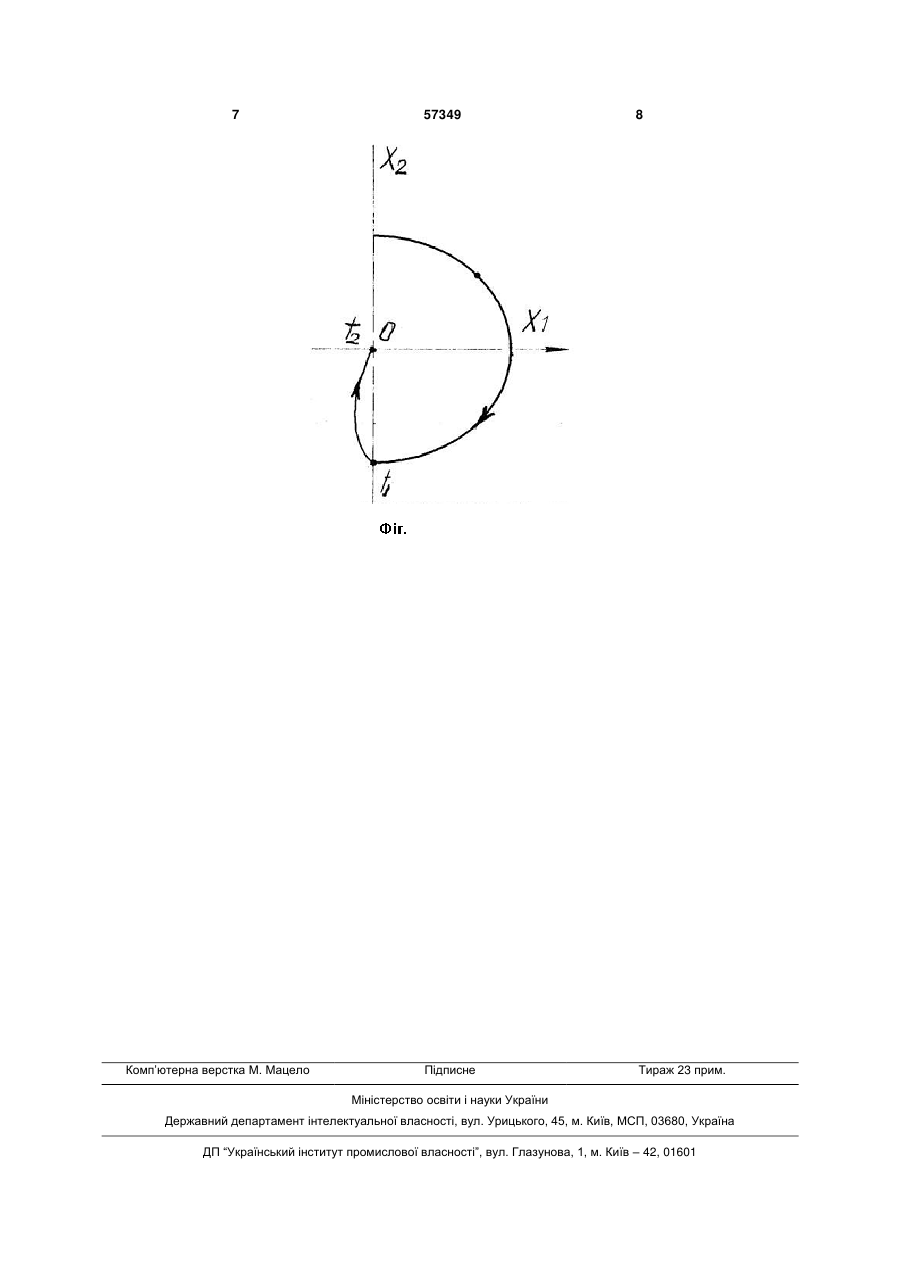
Спосіб автоматичного керування об'єктом, за яким формують сигнал керувальної дії, пропорційний сумі абсолютних значень сигналів розгалу 3 X10 0 ; X2 0 dX10 . dt 57349 (1) При цьому лінійна комбінація величини розгалуження Х1(0) і швидкості Х2(0) розгалуження дорівнює нульовому значенню а1·X1(0)+а2·Х2(0)=0, X1(0)=Х2(0)=0, (2) де а1, а2 - постійні коефіцієнти. При виконанні умови (2) запам'ятовується нульове розгалуження Х1(0)=0, а сигнал керувальної дії дорівнює також нульовому значенню. В деякий момент tn часу, що прийнятий за початковий, формується початкове розгалуження Х1n=Х1(tn)≠0, Х2n=Х2(tn)≠0, де X2n dXn tn . dt Припустимо також, що Х1n>0, Х2n>0 і на фазовій площині Х2=f(X1) початкове положення системи фіксують в першому квадранті. Лінійна комбінація Х1n, Х2n в момент tn часу приймає ненульове значення a1·X1n+a2·X2n≠0, (3) тому запам'ятовування сигналу керувальної дії не відбувається, а переміщення об'єкта має місце тільки під впливом початкових умов Х1n, Х2n. Величина сигналу керувальної дії дорівнює нульовому значенню. Таке переміщення об'єкта відбувається до моменту t1 часу, в який розгалуження приймає нульове значення, а швидкість розгалуження має ненульове значення a1·X11+a2·X2l=a10+а2Х21≠0, де (4) Х11=Х1(t1), Х21=Х2(t1). При умові (4) формується сигнал керувальної дії, що дорівнює величині (|Х11|+|Х21|)=|Х21| (5). Проведемо теоретичний аналіз запропонованого способу автоматичного керування об'єктом. Розглянемо математичну модель системи автоматичного керування у вигляді неоднорідного диференціального рівняння другого порядку d2X dX A 2 B CX f t , dt dt (6) де А - інерційний коефіцієнт; В - коефіцієнт опору; С - коефіцієнт жорсткості; f(t) - сигнал зовнішньої дії. Однорідне диференціальне рівняння, що відповідає (6), має вигляд A d2X dX B CX 0 . 2 dt dt (7) Рішення диференціального рівняння (7) визначають у вигляді X=Xaexp(St), де Ха - амплітудне значення; S - корінь характеристичного рівняння. Характеристичне рівняння для визначення двох коренів S1, S2 має вигляд AS2+BS+C=0. (8) Корені S1, S2 квадратного рівняння (8) мають вигляд S1 B B 4AC ; 2A 2 B B2 4AC S2 . 2A (9) 4 При умові, якщо B2 4AC 0 , корені S1, S2 характеристичного рівняння дійсні, різні і від'ємні. При цьому рішення диференціального рівняння (7) має вигляд: x(t)=С1ехр(S1t)+С2exp(S2t), (10) де C1, C2 - постійні коефіцієнти. Значення коефіцієнтів С1, С2 визначаються початковими умовами X10 C10 expS1 0 C0 expS2 0 2 C10 C0 2 , (11) dX 0 X2 0 X10 1 C10S1 expS1 0 . dt C0S2 expS2 0 C10S1 C0S2 2 2 (12) При заданні X1(0), X2(0) на підставі (11), (12) отримаємо значення C10 , C0 із системи рівнянь 2 C10 C0 X10 2 0 S C0 X 0 S1C1 2 2 2 (13) а саме: 1 1 S2 S1 ; S1 S2 1 2 X10 1 S2X10 X2 0 X2 0 S2 (14) 1 X10 X2 0 S1X10 S1 X2 0 1 S2X10 X2 0 ; S2 S1 X 0 S1X10 . (15) C0 2 2 S2 S1 C10 Рівняння (10) при урахуванні (15) приймає вигляд S X 0 X2 0 X 0 S1X10 xt 2 1 expS1t 2 expS2t . S2 S1 S2 S1 (16) Розгалуження X(t) переміщення продовжується до моменту t1, часу, в який величина розгалуження X(t) дорівнює нульовому значенню, а величина швидкості dX розгалуження не дорівнює dt нульовому значенню S2 X10 X2 0 expS1t1 S2 S1 ; X 0 S1X10 2 expS2 t1 0 S2 S1 X11 X1t1 dX1t1 S1S2 X10 X2 0 expS1t1 dt S2 S1 . S X 0 S1X10 2 2 expS2t1 S2 S1 (17) X21 (18) Подальше переміщення системи по фазовій траєкторії на фазовій площині від точки Х11=0, Х12≠0 до точки Х11=0, Х22=0 відбувається під дією сили, яка дорівнює величині 5 57349 U12=(|Х11|+|X21|)=|X21|, (19) де Х21 визначається співвідношенням (18) S1S2X10 X2 0 expS1t1 S2 S1 , S X 0 S1X10 2 2 expS2t1 S2 S1 X21 (20) а X11=0 визначається співвідношенням (17). Тепер розгалуження переміщення (траєкторія руху) відповідає диференціальному рівнянню A d2X dX B Cx X21 , dt dt (21) рішення якого має вигляд xt C12 expS1t C2 expS2t 2 X21 , C dx S1C12 expS1t S2C2 expS2t 2 dt (22) (23) при початкових умовах Xt1 X11 0 ; dXt1 X21 0 . dt (24) Визначаємо коефіцієнти C12 , C2 при засто2 суванні (22), (23), (24) при t=t1, X21 0, C (25) 2 expS t S C2 expS t ; X21 S1C1 11 2 2 21 X11 C12 expS1t1 C2 expS2t1 2 expS1t1 expS2t1 S2 S1expS1 S2 t1 ; S1 expS1t1 S2 expS2t1 (26) 1 X21 C X21 expS2t1 S2 expS2t1 S X21 expS2t1 2 1 ; C (27) 2 expS1t1 S1 expS1t1 X21 S1 C X21 expS1t11 ; C X21 (28) C2 1 1 S S X21 expS2t1 2 1 X21 2 1 C C ; S2 S1expS1 S2 t1 S2 S1expS1t1 (29) C2 2 2 S S X21 expS1t11 1 X21 1 1 C C ; S2 S1expS1 S2 t1 S2 S1expS2t1 (30) Розгалуження переміщення X(t) продовжується до моменту t2 часу, для якого Х12=0, Х22=0. Таким чином, як відмічено у дослідженні [Емельянов С.В. Системы автоматического управления с переменной структурой. М.: Наука, с. 64], час наявності перехідного процесу для фазової траєкторії запропонованого способу автоматичного ке 6 рування об'єктами буде зменшений при порівнянні з відомим способом за рахунок більш високої швидкості розгалуження, а формування сигналу керувальної дії однієї полярності без її зміни приводить до спрощення технологічного режиму керування об'єктом. Спосіб автоматичного керування об'єктом реалізують на підставі наступного алгоритму. 1. Формують режим вільного переміщення досліджувальної системи під дією початкового значення величини розгалуження і швидкості розгалуження. 2. Фіксують і запам'ятовують в деякий момент часу величину сигналу швидкості при нульовому значенні сигналу розгалуження; в цей же момент часу формують сигнал керувальної дії, причому полярність сигналу керувальної дії протилежна полярності сигналу швидкості розгалуження. 3. Сигнал керувальної дії формують рівним по модулю значенню швидкості розгалуження при нульовому значенню розгалуження. Новим в технологічному режимі реалізації способу автоматичного керування об'єктом є проведення операції формування сигналу керувальної дії тільки на одній ділянці при виборі полярності цього сигналу протилежним полярності сигналу швидкості розгалуження при нульовому значенні розгалуження . Спосіб автоматичного керування об'єктом реалізують таким чином. 1. Установлюють випробуваний об'єкт на рухому платформу вібростенда електродинамічного типа при жорсткому з'єднанні з платформою (в вихідному стані платформа вібростенда урівноважена). 2. Формують на вібростенді сигнал керувальної дії за рахунок надходження скачка постійного струму в обмотку рухомої котушки збудження вібростенда. 3. Реєструють і запам'ятовують величину сигналу розгалуження і швидкість розгалуження за допомогою датчиків, установлених на об'єкті. 4. При нульовому значенню сигналу розгалуження фіксують і запам'ятовують значення сигналу швидкості розгалуження. 5. Формують сигнал керувальної дії в момент часу, в який величина сигналу розгалуження дорівнює нульовому значенню; полярність сигналу керувальної дії протилежна полярності сигналу швидкості розгалуження. 6. В момент часу при нульовому значенні сигналу розгалуження і сигналу швидкості розгалуження величину сигналу керувальної дії установлюють по значенню, яке дорівнює нулю. Таким чином, при використанні даної корисної моделі не виникає необхідність у формуванні сигналу керувальної дії при переході від одної ділянки до іншої при зміні полярності, що значно спрощує цілому технологічний процес способу автоматичного керування об'єктом. 7 Комп’ютерна верстка М. Мацело 57349 8 Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomatic object control method
Автори англійськоюPuzko Ihor Danylovych
Назва патенту російськоюСпособ автоматического управления объектом
Автори російськоюПузько Игорь Данилович
МПК / Мітки
МПК: G05B 11/00, G05B 11/14
Мітки: об'єктом, керування, автоматичного, спосіб
Код посилання
<a href="https://ua.patents.su/4-57349-sposib-avtomatichnogo-keruvannya-obehktom.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного керування об’єктом</a>
Спосіб автоматичного керування об’єктом
Номер патенту: 50477
Опубліковано: 10.06.2010
Автор: Пузько Ігор Данилович
МПК: G05B 11/00
Мітки: спосіб, керування, автоматичного, об'єктом
Формула / Реферат:
Спосіб автоматичного керування об'єктом, за яким формують сигнал керувальної дії, пропорційний сумі абсолютних значень сигналів розгалуження і швидкості розгалуження, аналізують знак сигналу розгалуження та формують знак сигналу керувальної дії протилежним за полярністю знаку сигналу розгалуження, фіксують і запам'ятовують величину сигналу розгалуження з наступним інвертуванням сигналу керувальної дії в момент часу, в який величина сигналу...
Спосіб автоматичного керування процесом обробки
Номер патенту: 44267
Опубліковано: 25.09.2009
Автори: Катрук Орест Вікторович, Юр'єв Максим Віталійович, Вислоух Сергій Петрович
МПК: B23B 1/00
Мітки: обробки, процесом, спосіб, автоматичного, керування
Формула / Реферат:
Спосіб автоматичного керування процесом обробки, який полягає в тому, що проводять вимірювання вхідних та вихідних прямих і непрямих параметрів процесу обробки і на підставі аналізу результатів визначають залежності параметрів якості поверхні від режимів обробки і на їх основі корегують швидкість або подачу різання, який відрізняється тим, що як непрямий параметр контролю процесу обробки, який відповідає заданим параметрам якості обробленої...
Дорожня розмітка для автоматичного керування рухом транспортних засобів та спосіб автоматичного керування рухом
Номер патенту: 80389
Опубліковано: 25.09.2007
Автори: Сніцарук Леонід Адамович, Тюлькін Сергій Павлович
МПК: G08G 1/00, E01C 9/00, G06G 7/78
Мітки: розмітка, автоматичного, спосіб, керування, засобів, рухом, транспортних, дорожня
Формула / Реферат:
1. Дорожня розмітка для автоматичного керування рухом транспортного засобу, що складається з ліній, нанесених кольоровим матеріалом на проїзну частину дороги, яка відрізняється тим, що вона містить додаткові лінії дорожньої розмітки, в яких вздовж напрямку руху транспортних засобів за заданим законом чергуються ділянки ліній з високою та низькою електропровідністю з можливістю одержання інформації від індуктивних давачів, встановлених на...
Спосіб автоматичного керування нелінійним об’єктом
Номер патенту: 6507
Опубліковано: 16.05.2005
Автори: ТРОНЬ ЮРІЙ ОПАНАСОВИЧ, Мариношенко Олександр Петрович
МПК: G05B 13/00
Мітки: нелінійним, об'єктом, автоматичного, керування, спосіб
Формула / Реферат:
Спосіб автоматичного керування нелінійним об’єктом, який полягає в тому, що вимірюють регульовану координату, отриманий сигнал порівнюють з сигналом завдання, результат порівняння підсумовують з сигналом компенсації нелінійності, який відрізняється тим, що результат порівняння перетворюють в пропорційний сигнал на виході моделі, результат перетворення масштабують і алгебраїчно підсумовують з сигналом керування, вимірюють сигнал завдання,...
Спосіб автоматичного керування процесом варки паштету у жароварочній шафі
Номер патенту: 32189
Опубліковано: 12.05.2008
Автори: Кліменко В'ячеслав Анатолійович, Муратов Віктор Георгійович
МПК: A23L 1/315
Мітки: автоматичного, жароварочній, керування, процесом, шафи, варки, паштету, спосіб
Формула / Реферат:
Спосіб автоматичного керування процесом варки паштету, що включає вимірювання та регулювання температури в жароварочній шафі шляхом зміни витрати гріючої пари через калорифер, вимірювання та регулювання відносної вологості в жароварочній шафі зміною витрати гріючої пари прямої подачі через форсунку, який відрізняється тим, що одночасно вимірюють тиск гріючої пари та ступінь відкриття клапана прямої подачі пари на форсунку і пропорційно...
Попередній патент: Гідрооб`ємно-механічна трансмісія транспортного засобу
Наступний патент: Спосіб лікування пошкоджень сухожилків згиначів пальців кисті
Випадковий патент: Лікарський засіб на основі антагоніста рецептора ангіотензину іі та блокатора кальцієвих каналів для профілактики і лікування кардіоваскулярних захворювань