Вимірювач кутових прискорень
Номер патенту: 61579
Опубліковано: 17.11.2003
Автори: Субота Анатолій Максимович, Бандура Іван Миколайович, Симонов Володимир Федорович, Кулік Анатолій Степанович
Формула / Реферат
Вимірювач кутового прискорення, що містить замкнутий корпус, наприклад тороїдального типу, заповнений рідиною та конструктивно зв'язаний з сильфоном та пристроєм регулювання динамічних характеристик, який відрізняється тим, що всередині замкнутого корпусу в діагонально протилежних місцях встановлені плоскопаралельні конденсатори, нерухомі електроди яких забезпечують перетікання рідини, та рухомі електроди, ізольовані від нерухомих і зв'язані з ними за допомогою пружних елементів, та розташовані з проміжком по відношенню до внутрішньої поверхні корпусу, електроди конденсаторів через автогенератори підключені до пристрою цифрової обробки інформації.
Текст
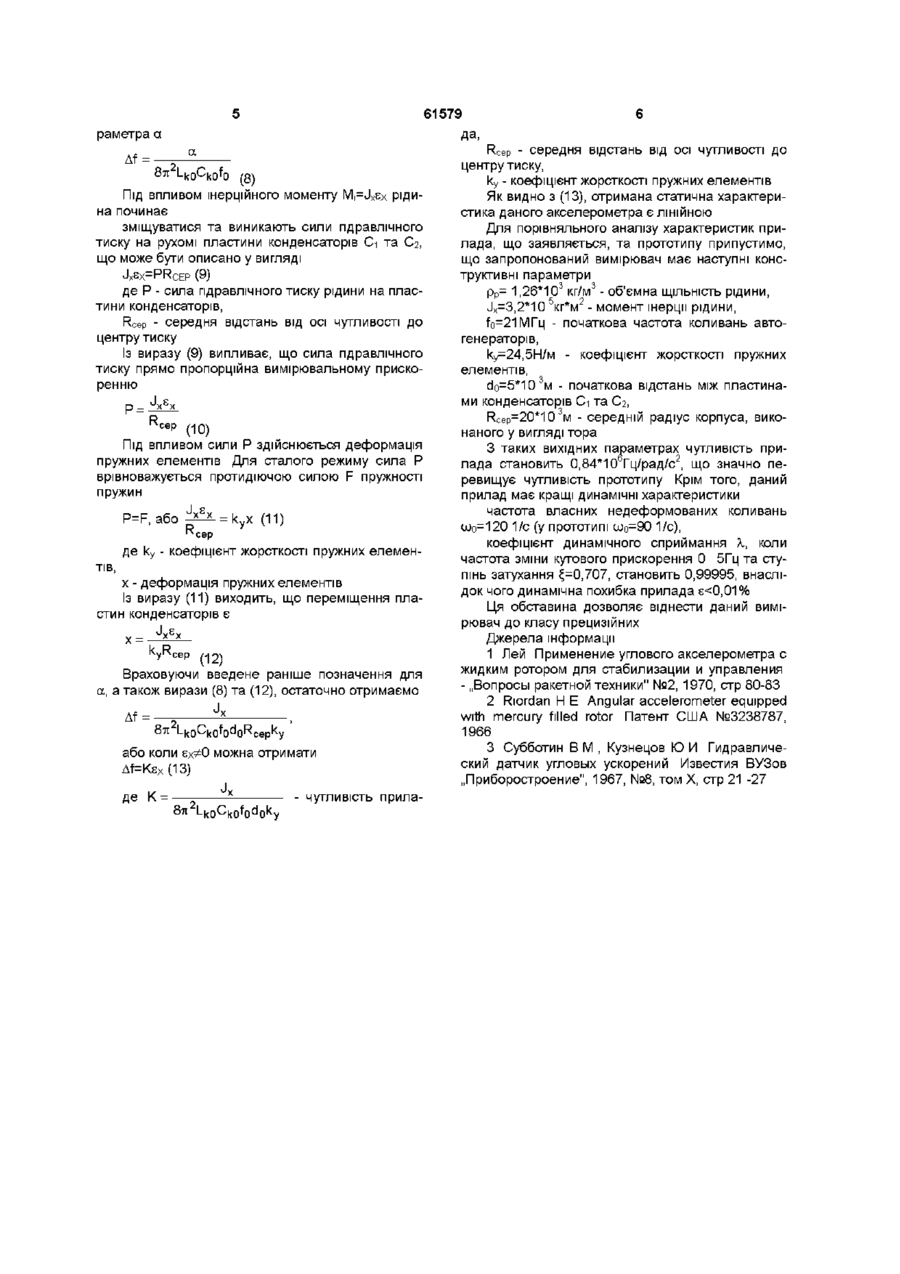
Вимірювач кутового прискорення, що містить замкнутий корпус, наприклад тороїдального типу, заповнений рідиною та конструктивно зв'язаний з сильфоном та пристроєм регулювання динамічних характеристик, який відрізняється тим, що всередині замкнутого корпусу в діагонально протилежних місцях встановлені плоскопаралельні конденсатори, нерухомі електроди яких забезпечують перетікання рідини, та рухомі електроди, ізольовані від нерухомих і зв'язані з ними за допомогою пружних елементів, та розташовані з проміжком по відношенню до внутрішньої поверхні корпусу, електроди конденсаторів через автогенератори підключені до пристрою цифрової обробки інформації Винахід відноситься до вимірювальної техніки і може бути використаний в авіаційній та КОСМІЧНІЙ промисловості в інерційних навігаційних системах для вимірювання кутових прискорень рухомих об'єктів Відомий пристрій для вимірювання кутових прискорень [1], який являє собою заповнену рідиною кільцеву трубку, що утримується моментним серводвигуном Моментний серводвигун виконаний у вигляді збалансованого гальванічного механізму, що є підвішеним за допомогою опорних осей і ПІДШИПНИКІВ на каміннях Один кінець механізму зв'язаний з диском, який утримує кільцеву трубку з чутливою сейсмічною масою -рідиною Рух рідини відносно корпуса за наявністю кутового прискорення викликає рух диска, який сприймається перетворювачем переміщення Вихідний сигнал з перетворювача переміщення поступає на гальванометричний датчик моменту До недоліків даного вимірювача треба віднести наявність порога чутливості, обумовленого підшипниковим ПІДВІСОМ гальванометричного механізму, складність конструктивного виконання, а також вид вихідного сигналу - напруга постійного струму, що потребує застосування аналого-цифрового перетворювача для цифрових систем управління ного з постійних магнітів в ній наводиться е р с Дана е р с знімається з вмонтованих контактів і подається через схему зворотного зв'язку до ділянки ртуті, розміщеної під другим постійним магнітом Таким чином створюється компенсаційний момент, що врівноважує вимірювальний момент Недоліком даного вимірювача являється його низька чутливість та наявність аналогового вихідного сигналу в вигляді напруги постійного струму Відомий найбільш близький за технічною суттю вимірювач кутового прискорення [3], який обрано як прототип, що містить в якості чутливого елементу (сейсмічної маси) рідину, вміщену в замкненому корпусі, конструктивно зв'язаного з сильфоном>в якому в діагонально-протилежних точках розміщені дві лопаті, що утримуються в нейтральному положенні за допомогою механічних пружин Лопаті розміщуються в каналах перетікання рідини Крім того, є пристрій регулювання динамічних характеристик приладу, що являє собою додатковий ЗОВНІШНІЙ канал для перетікання рідини При обертанні корпуса приладу з кутовим прискоренням рідина перетікає через канали і захоплює лопаті В сталому режимі швидкість перетікання рідини І тиск будуть пропорційні прискоренню корпуса приладу Вихідний сигнал даного приладу представляє собою напругу постійного струму, що є одним з основних недоліків розглядуваного вимірювача Відомий вимірювач кутового прискорення [2], в якому в якості чутливого елемента застосована ртуть, вміщена в кільцевий корпус При зміщенні ртуті відносно корпуса, яка знаходиться в полі од В основу запропонованого винаходу покладе ю (О 61579 но вирішення задачі збереження переваг вимірювача кутових прискорень гідравлічного типу, виконаного по прямій схемі вимірювання (тобто без зворотного зв'язку), до якої відноситься прототип, за умовою забезпечення вихідного сигналу у формі частоти Це виключає необхідність застосування аналого-цифрових перетворювачів для сучасних цифрових систем управління, підвищує перешкодозахищеність тракту передачі інформації, спрощує процес забезпечення потрібної чутливості за рахунок вибору відповідної початкової частоти генераторів, а також дозволяє зменшити габаритно-масові параметри Поставлена задача вирішується тим, що усередині замкнутого корпуса, наприклад, тороїдального типу, заповненого рідиною та конструктивно зв'язаного з сильфоном і пристроєм регулювання динамічних характеристик, згідно з винаходом в діагональне протилежних місцях встановлені плоскопаралельні конденсатори, нерухомі електроди яких дозволяють перетікання рідини, та рухомі електроди, ізольовані від нерухомих і зв'язані з ними за допомогою пружних елементів, та розташованих з проміжком по відношенню до внутрішньої поверхні корпуса, електроди конденсаторів через автогенератори підключені до пристрою цифрової обробки інформації Суть винаходу пояснюється кресленнями На фіг 1 зображений загальний вигляд вимірювача кутового прискорення, що заявляється, на фіг 2 розріз А-А Вимірювач містить в собі замкнутого типу корпус 1, виконаний, наприклад, у вигляді тора Внутрішній об'єм тора заповнений робочою рідиною 2, що виконує роль сейсмічної маси Для виключення впливу об'ємних розширень рідини на конструктивні елементи приладу з-за температурних змін до корпуса прикріплений сильфон 3 Усередині корпуса в діаметрально протилежних його частинах розміщується по два електрода у вигляді плоских пластин Один електрод 4 є нерухомим, інший 5 - є рухомим Між рухомим електродом 5 і нерухомим електродом 4 розміщується пружний елемент 6 Електроди електрично ізольовані від корпуса 1 та один від одного Електроди 4 і виконують функцію обкладинок плоскопаралельного конденсатора Кожна пара електродів ВІДПОВІДНИМ образом підключена до вхідних кіл автогенераторів 7 та 8 ВИХІДНІ сигнали автогенераторів поступають на пристрій цифрової обробки інформації 9 Крім того, паралельно кожній парі електродів до корпуса приєднані пристрої регулювання динамічних характеристик акселерометра 10 Дані пристрої представляють собою канали з регульованим прохідним розрізом, що забезпечує зміну швидкості перетікання рідини з однієї частини корпуса, наприклад, що знаходиться над електродами, в іншу його частину - що знаходиться під ними Основні напрямки перетікання рідини на фіг 1 показані стрілками за умови, що вектор кутового прискорення єх об'єкта співпадає з віссю чутливості вимірювача (фіг 2) Принцип роботи вимірювача полягає в наступному при обертанні об'єкта з кутовим прискоренням єх до робочої рідини прикладається інерційний момент , (1) де J x - момент інерції робочої рідини відносно осі ОХ Під ВПЛИВОМ моменту М, виникає сила тиску на рухомі пластини, що утворюють сумісно з нерухомими пластинами конденсатори Сі та С 2 (фиг 1) При цьому початкова відстань do між рухомими пластинами та нерухомими пластинами зміниться і, наприклад, для вибраного напрямку кутового прискорення sx ВІДПОВІДНО стане рівною di=d o -x, d 2 =d 0 +x (2) де х - зміщення пластин відносно початкового положення Пластини конденсаторів Сі та С2 в даному випадку виконують функції ємнісного перетворювача 3 метою перетворення поточного значення ємності кожного конденсатора в частоту їх пластини включені ВІДПОВІДНИМ образом в коливальні контури автогенераторів 7 і 8 При цьому залежність частот fi та f2 коливань вихідних сигналів автогенераторів мають вид де l_ko - індуктивність контурів, Си, Ck2 - поточне значення ємностей контурів За умори Си=Ск2-Ско автогенератори генерують однакові частоти fi=f2=fo, що відповідає нульовому значенню їх різниці Af=fi-f2=0, а, отже, і вимірюваному прискоренню sx=0 Коли sx^O вирази для ємностей ємкісних перетворювачів можуть бути записані у вигляді Ск1 с С к0 к2 1 к0 1+ (4) Де С к 0 = ss,,S початкова ємність конденсато рів Сі та С 2 , коли sx=0, s - діелектрична проникність рідини, su - електрична постійна, S - площа пластин конденсаторів Сі та С 2 do - початкова відстань між пластинами Введемо позначення x/do=a і після підстановки виразів (4) в (3) отримаємо 1 1 ч= ' h kO 1-а С kO (5) На основі виразів (5) маємо r 2 ~ Ч = 2л L k 0 C k 0 (6) ВІДПОВІДНО виразу (6) різниця квадратів поточних значень частот fi та f 2 2 ЛІНІЙНО залежить від а, що можливо за умови (7) де fo - початкова частота коливань сигналів автогенераторів, Af = вихідних - різницева частота На основі виразів (6) та (7) маємо наступну залежність Af від відносного вимірювального па 61579 paметра а Да, Af = 8л L k O C k O f o (8) Під ВПЛИВОМ інерційного моменту M F J X S X рідина починає зміщуватися та виникають сили гідравлічного тиску на рухомі пластини конденсаторів Сі та Сг, що може бути описано у вигляді J X SX=PRCEP (9) де Р - сила гідравлічного тиску рідини на пластини конденсаторів, Rcep - середня відстань від осі чутливості до центру тиску Із виразу (9) випливає, що сила гідравлічного тиску прямо пропорційна вимірювальному прискоренню R cep Під ВПЛИВОМ СИЛИ Р ЗДІЙСНЮЄТЬСЯ деформація пружних елементів Для сталого режиму сила Р врівноважується протидіючою силою F пружності пружин P=F, або (11) де ку - коефіцієнт жорсткості пружних елементів, х - деформація пружних елементів Із виразу (11) виходить, що переміщення пластин конденсаторів є X= Враховуючи введене раніше позначення для а, а також вирази (8) та (12), остаточно отримаємо Af=—2 . 8л L k O C k O f o d o R c e p k y або коли sx^O можна отримати Af=Ks x (13) де К = Jv 8л L k O C k O f o d o k y - чутливість прила Rcep - середня відстань від осі чутливості до центру тиску, ку - коефіцієнт жорсткості пружних елементів Як видно з (13), отримана статична характеристика даного акселерометра є ЛІНІЙНОЮ Для порівняльного аналізу характеристик прилада, що заявляється, та прототипу припустимо, що запропонований вимірювач має наступні конструктивні параметри 3 3 р р = 1,26*10 кг/м - об'ємна ЩІЛЬНІСТЬ рідини, 5 2 J x =3,2*10 кг*м - момент інерції рідини, fo=21 МГц - початкова частота коливань автогенераторів, к у =24,5Н/м - коефіцієнт жорсткості пружних елементів, 3 do=5*10 M - початкова відстань між пластинами конденсаторів Сі та Сг, R c e p-20*10 3 M - середній радіус корпуса, виконаного у вигляді тора З таких вихідних параметрах чутливість прилада становить 0,84*10 Гц/рад/с2, що значно перевищує чутливість прототипу Крім того, даний прилад має кращі динамічні характеристики частота власних недеформованих коливань шо=120 1/с (у прототипі ш 0 =90 1/с), коефіцієнт динамічного сприймання X, коли частота зміни кутового прискорення 0 5Гц та ступінь затухання £=0,707, становить 0,99995, внаслідок чого динамічна похибка прилада s
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for measuring angular acceleration
Автори англійськоюKulik Anatolii Stepanovych, Subota Anatolii Maksymovych, Bandura Ivan Mykolaiovych, Symonov Volodymyr Fedorovych
Назва патенту російськоюУстройство для измерения углового ускорения
Автори російськоюКулик Анатолий Степанович, Субота Анатолий Максимович, Бандура Иван Николаевич, Симонов Владимир Федорович
МПК / Мітки
МПК: G01P 15/125, B64G 1/24
Мітки: кутових, вимірювач, прискорень
Код посилання
<a href="https://ua.patents.su/4-61579-vimiryuvach-kutovikh-priskoren.html" target="_blank" rel="follow" title="База патентів України">Вимірювач кутових прискорень</a>
Радіолокаційний фазовий вимірювач кутових координат із бе3упинним випромінюванням
Номер патенту: 40133
Опубліковано: 16.07.2001
Автори: Бахвалов Валентин Борисович, Порошин Сергій Михайлович
МПК: G01S 3/14
Мітки: координат, радіолокаційний, бе3упинним, випромінюванням, вимірювач, кутових, фазовий
Формула / Реферат:
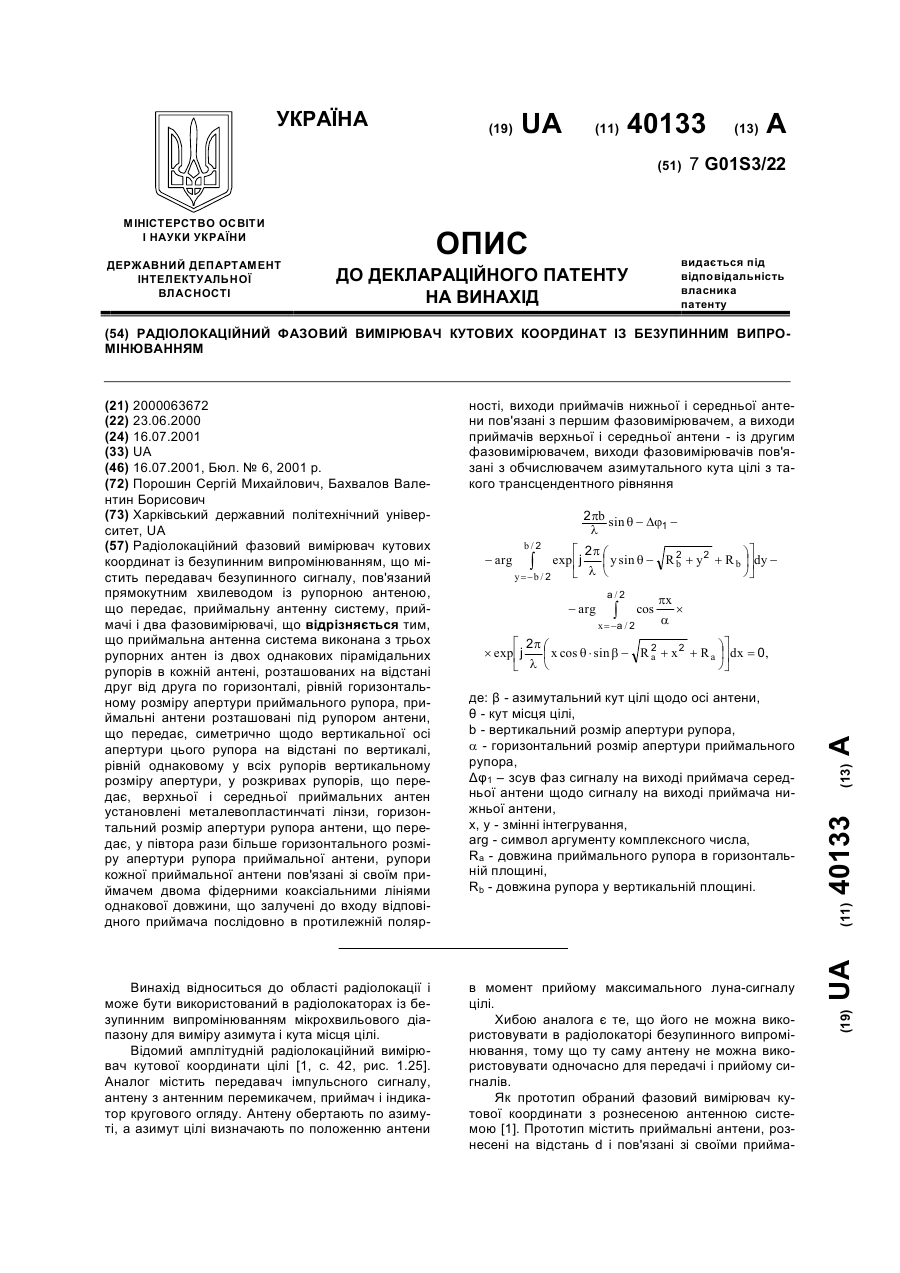
Радіолокаційний фазовий вимірювач кутових координат із безупинним випромінюванням, що містить передавач безупинного сигналу, пов'язаний прямокутним хвилеводом із рупорною антеною, що передає, приймальну антенну систему, приймачі і два фазовимірювача, що відрізняються тим, що приймальна антенна система виконана з трьох рупорних антен із двох однакових пірамідальних рупори в кожній антені, розташованих на відстані друг від друга по...
Наземний вимірювач кутових координат цілі
Номер патенту: 17671
Опубліковано: 15.03.2002
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: наземний, кутових, цілі, вимірювач, координат
Формула / Реферат:
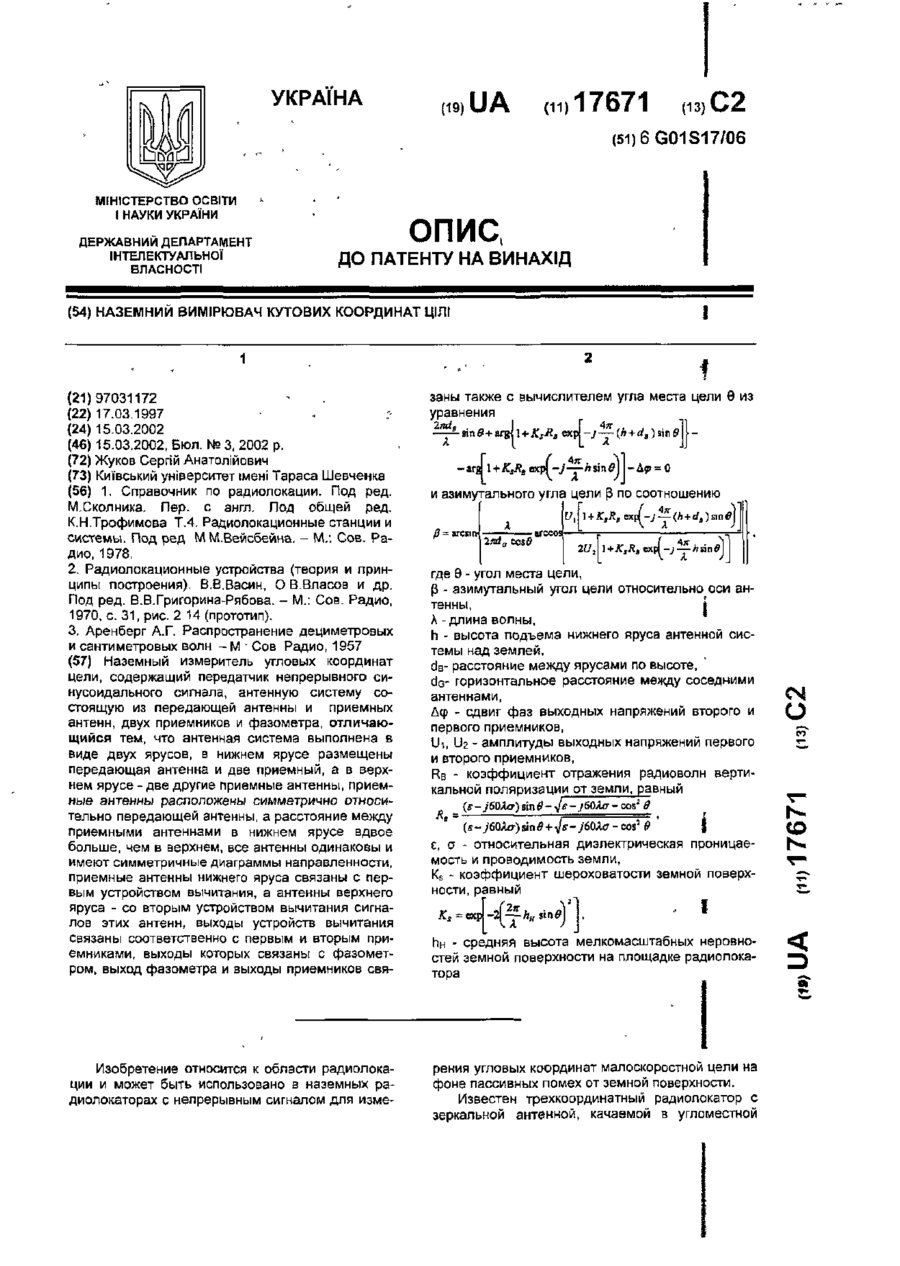
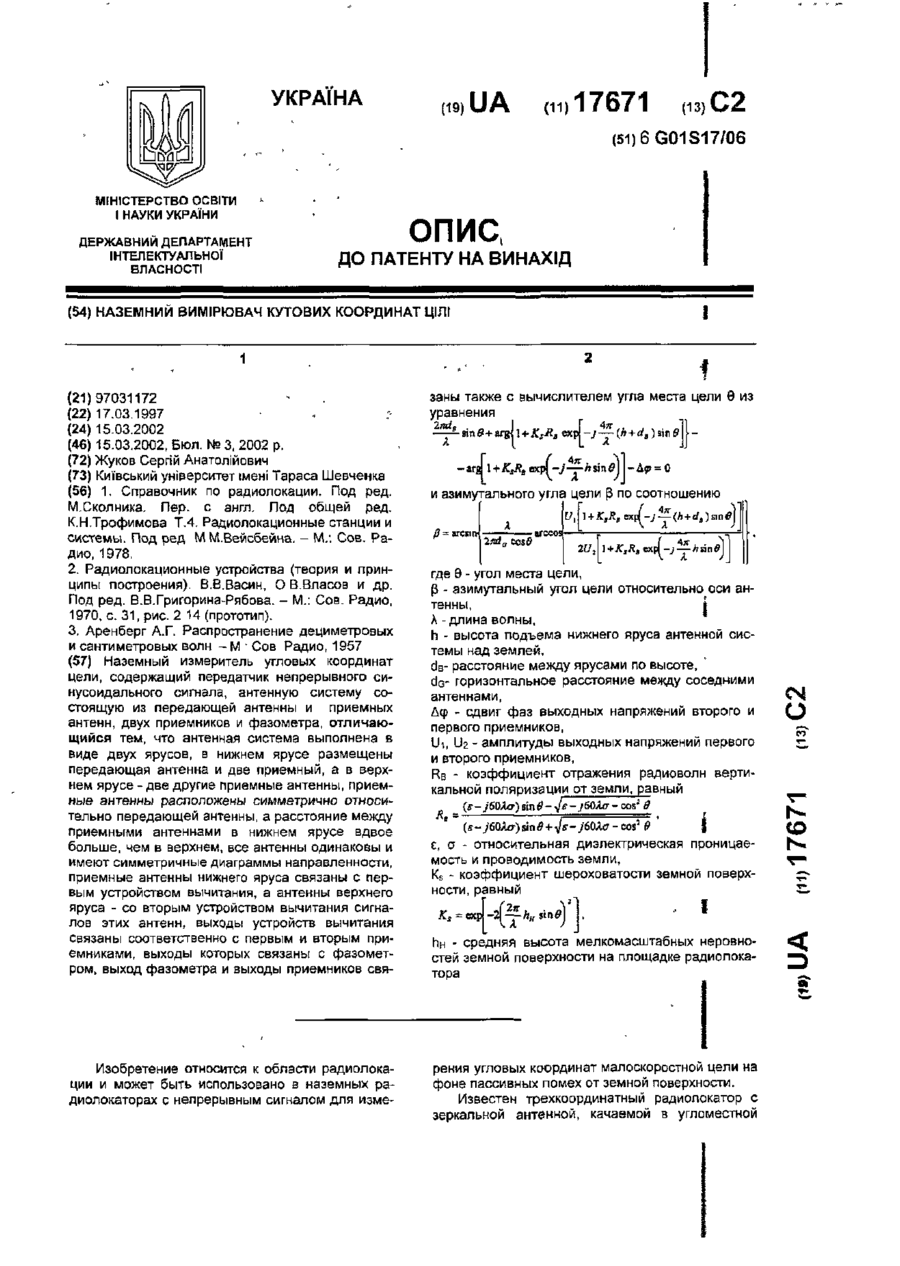
Наземный измеритель угловых координат цели, содержащий передатчик непрерывного синусоидального сигнала, антенную систему, состоящую из передающей антенны и двух приемных антенн, двух приемников и фазометра, отличающийся тем, что антенная система выполнена в виде двух ярусов, в нижнем ярусе размещены передающая антенна и две приемных, а в верхнем ярусе - две другие приемные антенны, приемные антенны расположены симметрично относительно...
Hаземhий вимірювач кутових коордиhат цілі
Номер патенту: 17671
Опубліковано: 20.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: кутових, цілі, коордиhат, hаземhий, вимірювач
Формула / Реферат:
Наземный измеритель угловых координат цели, содержащий передатчик непрерывного синусоидального сигнала, антенную систему, состоящую из передающей антенны и двух приемных антенн, двух приемников и фазометра, отличающийся тем, что антенная система выполнена в виде двух ярусов, в нижнем ярусе размещены передающая антенна и две приемных, а в верхнем ярусе - две другие приемные антенны, приемные антенны расположены симметрично относительно...
Пристрій для вимірювання прискорень на обресорених частинах рухомого складу
Номер патенту: 35358
Опубліковано: 15.03.2001
Автори: Михайленко Віталій Михайлович, Блохін Євген Петрович, Сапарова Лариса Сергійовна, Оптовець Світлана Петрівна
МПК: G01P 15/08
Мітки: обресорених, рухомого, прискорень, пристрій, складу, частинах, вимірювання
Формула / Реферат:
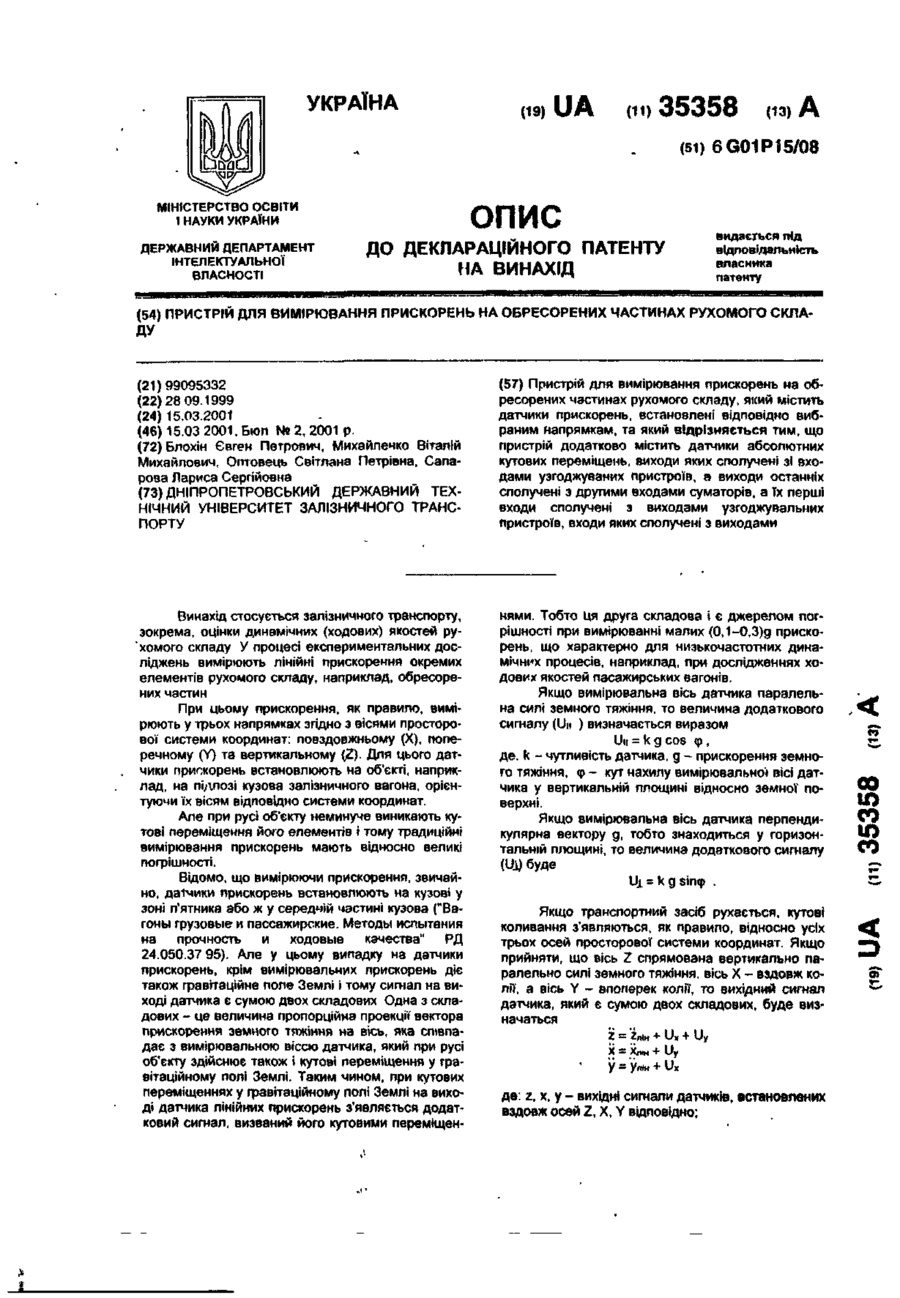
Пристрій для вимірювання прискорень на обресорених частинах рухомого складу, який містить датчики прискорень, встановлені відповідно вибраним напрямкам, та який відрізняється тим, що пристрій додатково містить датчики абсолютних кутових переміщень, виходи яких сполучені зі входами узгоджуваних пристроїв, а виходи останніх сполучені з другими входами суматорів, а їх перші входи сполучені з виходами узгоджувальних пристроїв, входи яких...
Спосіб вимірювання прискорень на обресорених частинах рухомого складу
Номер патенту: 32264
Опубліковано: 15.12.2000
Автори: Сапарова Лариса Сергійовна, Мямлін Сергій Віталійович, Михайленко Віталій Михайлович, Оптовець Світлана Петрівна, Блохін Євген Петрович
МПК: G01P 15/00, B61C 11/00
Мітки: складу, частинах, спосіб, прискорень, обресорених, рухомого, вимірювання
Текст:
...буде Uj_=k- g- sin ф. Якщо транспортний засіб рухається, кутові коливання, як правило, з'являються відносно усіх трьох вісей просторової системи координат. Якщо прийняти, що вісь Z спрямована вертикально, паралельно силі земного тяжіння, вісь X - спрямована вздовж шляху руху, вісь Y - упоперек шляху, то вихідний сигнал датчика, вимірю вальна вісь якого спрямована вздовж вісі Z, є сумою двох сигналів, сигналу відповідного лінійному...
Попередній патент: Спосіб видобування нафти за допомогою енергії нагнітальних свердловин та пристрій для його здійснення
Наступний патент: Гідропривід ущільнюючої плити сміттєвоза
Випадковий патент: Повітряно-струминний двигун