Прив’язний робот брдм

Формула / Реферат
Прив'язний робот БРДМ, що містить елементи: стійки, важелі, зв'язки, траверси, кронштейни та шарніри, які повторюють антропометричну будову людини, який відрізняється тим, що рух робота (обертання навколо осей шарнірів) здійснено від електросистеми машини з подачею керуючих команд від оператора, який знаходиться у захищеному корпусі машини, на одязі якого одягнені елементи, які повторюють елементи, з яких складено робота, шарніри яких виконані з елементами електричного зв'язку через електросистему машини та через кабель з відповідними елементами робота, один кінець захисної оболонки кабелю шарнірно поєднаний з корпусом машини, а другий кінець захисної оболонки кабелю намотаний на комутаційну котушку, яка встановлена у районі погруддя робота, яка виконана з можливістю обертання при самостійному транспортному переміщенні робота, при цьому на поясі робота одягнена юбка у вигляді обруча з чотирма низхідними променями, на кінцях яких розташовано по самостійно обертовому навколо вертикальної осі ролика, з можливістю зависання робота на обручі юбки при непередбаченому перекиданні робота з здійсненням опори юбки об ґрунт через ролики, в тому числі і під час руху машини при буксируванні робота, у районі голови робота розташований прожектор для можливої підсвітки при недостатньому освітленні, а в районі очей робота розташовані відеокамери, пов'язані з моніторами, розташованими біля очей оператора, кожна опорна поверхня стійок ніг робота виконана у вигляді напрямної, на яку посаджено повзун, який пов'язаний з рамою, при цьому рама з напрямною пов'язана пружним елементом, рама шарнірно поєднана з чотирма опорними пальцями, з можливістю повороту опорних пальців при русі напрямної відносно рами під час установки опорної стійки гомілки ніг робота на ґрунт, з опорою об ґрунт чотирма розвернутими пальцями разом з нижньою п'ятою рами, при цьому у оператора, який розташований у корпусі машини, на кінцях опорних пальців стійок ніг та п'ят рам на відміну від робота розташовані ролики, якими ноги оператора встановлені на увігнуту сферичну основу, яка розташована у корпусі машини, крім того пояс оператора закріплений до корпуса машини штангою, з можливістю виконання руху ходіння оператором при скочуванні ніг оператора, одягнених у напрямні з рамами та роликами, по сферичній основі, при фіксації свого розташування відносно корпуса машини (та сферичної основи) штангою, з повторенням руху елементами ніг робота в його русі по поверхні ґрунту.
Текст
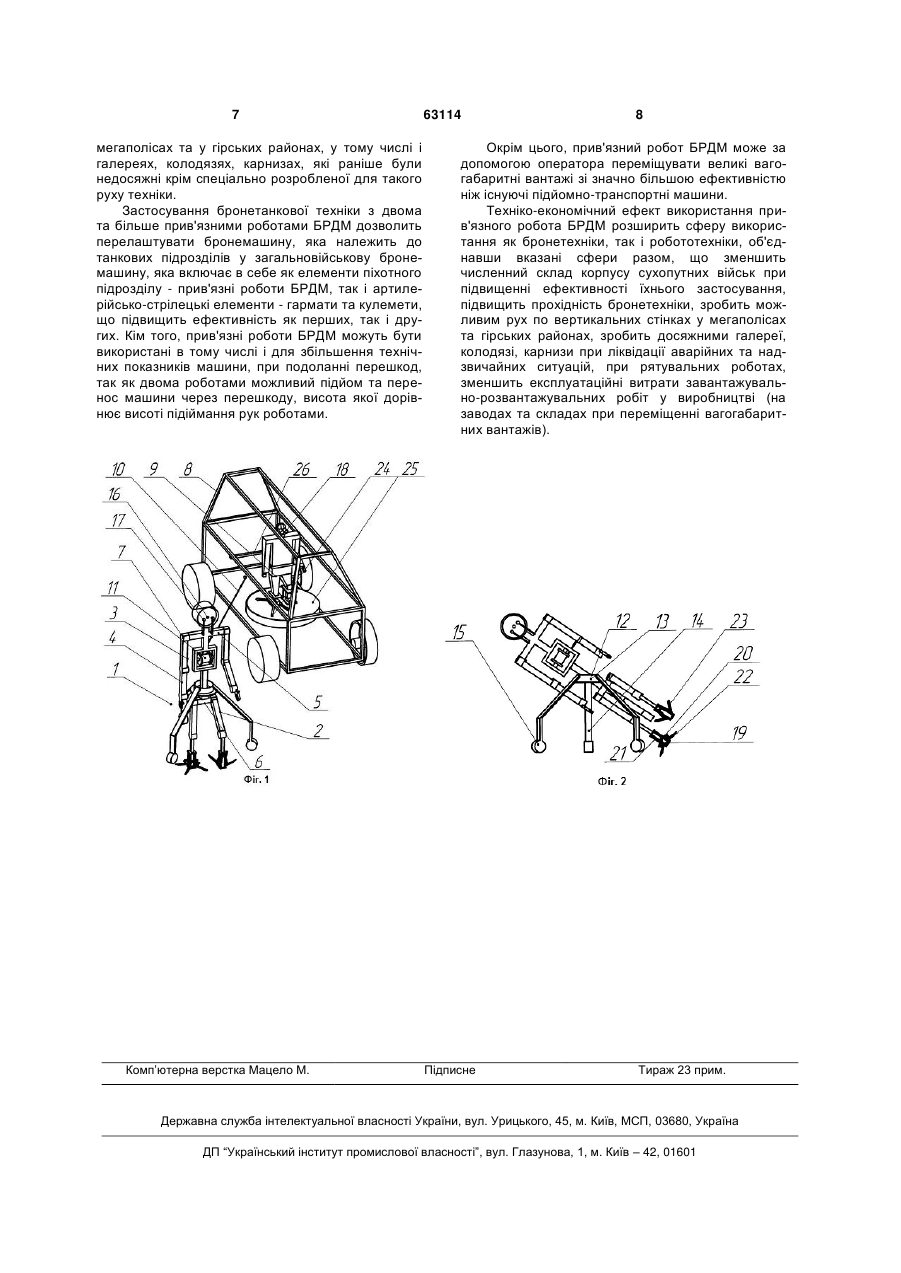
Прив'язний робот БРДМ, що містить елементи: стійки, важелі, зв'язки, траверси, кронштейни та шарніри, які повторюють антропометричну будову людини, який відрізняється тим, що рух робота (обертання навколо осей шарнірів) здійснено від електросистеми машини з подачею керуючих команд від оператора, який знаходиться у захищеному корпусі машини, на одязі якого одягнені елементи, які повторюють елементи, з яких складено робота, шарніри яких виконані з елементами електричного зв'язку через електросистему машини та через кабель з відповідними елементами робота, один кінець захисної оболонки кабелю шарнірно поєднаний з корпусом машини, а другий кінець захисної оболонки кабелю намотаний на комутаційну котушку, яка встановлена у районі погруддя робота, яка виконана з можливістю обертання при самостійному транспортному переміщенні робота, при цьому на поясі робота одягнена юбка у вигляді обруча з чотирма низхідними променями, на кінцях яких розташовано по самостійно обертовому навколо вертикальної осі ролика, з можливістю зависання робота на обручі юбки при непередбаченому перекиданні робота з здійснен U 2 63114 1 3 необхідність виходу з захищеного корпусу бронетехніки персоналу при виконанні ним визначених технологічних дій, під час яких персонал вразливий до вказаних загроз для свого здоров'я та життя. Це викликає підвищені стреси персоналу, які можуть впливати на його дії, що опосередковано впливає і на можливість спасіння потерпілих. Недоліком бронетанкової техніки є обмеження можливості взаємодії з людиною та пристроями, які виконані для їхнього застосування людиною або проти людини. У теперішній час широкого розповсюдження отримали спеціалізовані телекеровані роботи, окремі частини яких мають часткову схожість з окремими частинами тіла людини, технічні можливості яких вкрай обмежені, та вони не виходять за межі реалізації рішень вузьких спеціалізованих задач у військовій сфері діяльності. У теперішній час широкого розповсюдження у кінематографії отримали фантастичні фільми, де головними героями є роботи, які мають високий ступінь схожості по антропометричних ознаках з людиною, що є прототипом. Недоліком роботів, у тому числі і тих, які мають частковий ступінь схожості з людиною, є обмежений енергетичний потенціал, обмежена орієнтація під час транспортних та технологічних рухів, а також обмеження контролю виконуваних роботом рухів з боку оператора. В основу корисної моделі поставлена задача створення прив'язного робота БРДМ, що містить елементи: стійки, важелі, зв'язки, траверси, кронштейни та шарніри, які повторюють антропометричну будову людини, у якому завдяки тому, що рух робота (обертання навколо осей шарнірів) здійснено від електросистеми машини з подачею керуючих команд від оператора, який знаходиться у захищеному корпусі машини, на одязі якого одягнені елементи, які повторюють елементи, з яких складено робота, шарніри яких виконані з елементами електричного зв'язку через електросистему машини та через кабель з відповідними елементами робота, один кінець захисної оболонки кабелю шарнірно поєднаний з корпусом машини, а другий кінець захисної оболонки кабелю намотаний на комутаційну котушку, яка встановлена у районі погруддя робота, яка виконана з можливістю обертання при самостійному транспортному переміщенні робота, при цьому на поясі робота одягнена юбка у вигляді обруча з чотирма низхідними променями, на кінцях яких розташовано по самостійно обертовому навколо вертикальної осі ролику, з можливістю зависання робота на обручі юбки при непередбаченому перекиданні робота з здійсненням опори юбки об ґрунт через ролики, в тому числі і під час руху машини при буксируванні робота, у районі голови робота розташований прожектор для можливої підсвітки при недостатньому освітленні, а в районі очей робота розташовані відеокамери, пов'язані з моніторами, розташованими біля очей оператора, кожна опорна поверхня стійок ніг робота виконана у вигляді напрямної, на яку посаджено повзун, який пов'язаний з рамою, при цьому рама з напрямною пов'язана пружним елементом, рама шарнірно поєднана з 63114 4 чотирма опорними пальцями, з можливістю повороту опорних пальців при русі напрямної відносно рами під час установки опорної стійки гомілки ніг робота на ґрунт, з опорою об ґрунт чотирма розвернутими пальцями разом з нижньою п'ятою рами, при цьому у оператора, який розташований у корпусі машини, на кінцях опорних пальців стійок ніг та п'ят рам відмінно від робота розташовані ролики, якими ноги оператора встановлені на увігнуту сферичну основу, яка розташована у корпусі машини, крім того пояс оператора закріплений до корпуса машини штангою, з можливістю виконання руху ходіння оператором при скочуванні ніг оператора, одягнених у напрямні з рамами та роликами, по сферичній основі, при фіксації свого розташування відносно корпуса машини (та сферичної основи) штангою, з повторенням руху елементами ніг робота в його русі по поверхні ґрунту, забезпечується високий ступінь енергозабезпечення та орієнтації і контролю під час транспортного та технологічного руху робота, та за рахунок цього розширена сфера застосування бронетехніки та роботів. Поставлена задача вирішується прив'язним роботом БРДМ, що містить елементи: стійки, важелі, зв'язки, траверси, кронштейни та шарніри, які повторюють антропометричну будову людини, у якому відповідно до корисної моделі рух робота (обертання навколо осей шарнірів) здійснено від електросистеми машини з подачею керуючих команд від оператора, який знаходиться у захищеному корпусі машини, на одязі якого одягнені елементи, які повторюють елементи, з яких складено робота, шарніри яких виконані з елементами електричного зв'язку через електросистему машини та через кабель з відповідними елементами робота, один кінець захисної оболонки кабелю шарнірно поєднаний з корпусом машини, а другий кінець захисної оболонки кабелю намотаний на комутаційну котушку, яка встановлена у районі погруддя робота, яка виконана з можливістю обертання при самостійному транспортному переміщенні робота, при цьому на поясі робота одягнена юбка у вигляді обруча з чотирма низхідними променями, на кінцях яких розташовано по самостійно обертовому навколо вертикальної осі ролику, з можливістю зависання робота на обручі юбки при непередбаченому перекиданні робота з здійсненням опори юбки об ґрунт через ролики, в тому числі і під час руху машини при буксируванні робота, у районі голови робота розташований прожектор для можливої підсвітки при недостатньому освітленні, а в районі очей робота розташовані відеокамери, пов'язані з моніторами, розташованими біля очей оператора, кожна опорна поверхня стійок ніг робота виконана у вигляді напрямної, на яку посаджено повзун, який пов'язаний з рамою, при цьому рама з напрямною пов'язана пружним елементом, рама шарнірно поєднана з чотирма опорними пальцями, з можливістю повороту опорних пальців при русі напрямної відносно рами під час установки опорної стійки гомілки ніг робота на ґрунт, з опорою об ґрунт чотирма розвернутими пальцями разом з нижньою п'ятою рами, при цьому у оператора, який розташований у корпусі машини, на кінцях 5 опорних пальців стійок ніг та п'ят рам на відміну від робота розташовані ролики, якими ноги оператора встановлені на увігнуту сферичну основу, яка розташована у корпусі машини, крім того пояс оператора закріплений до корпуса машини штангою, з можливістю виконання руху ходіння оператором при скочуванні ніг оператора, одягнених у напрямні з рамами та роликами, по сферичній основі, при фіксації свого розташування відносно корпуса машини (та сферичної основи) штангою, з повторенням руху елементами ніг робота в його русі по поверхні ґрунту. Корисна модель пояснюється графічними матеріалами, на яких показано на Фіг. 1 - схема прив'язного робота БРДМ, на Фіг. 2 - схема зависання робота на юбці. Прив'язний робот 1 БРДМ, що містить елементи: стійки 2 гомілок та стегон ніг, важелі 3 плечей та передпліч рук, зв'язки 4 кистей рук, траверси 5 плечей, кронштейни 6 тазостегнових структур та шарніри 7 їх з'єднань, які повторюють антропометричну будову людини, рух робота 1 (обертання елементів навколо осей шарнірів 7) здійснено від електросистеми машини 8 з подачею керуючих команд від оператора 9, який знаходиться у захищеному корпусі машини 8, на одязі оператора 9 одягнені елементи, які повторюють елементи 2, 3, 4, 5, 6, з яких складено робот 1, шарніри 7 яких виконані з елементами електричного зв'язку через електросистему машини 8 та через кабель 10 з відповідними елементами робота 1, один кінець захисної оболонки кабелю 10 шарнірно поєднаний з корпусом машини 8, а другий кінець захисної оболонки кабелю 10 намотаний на комутаційну котушку 11, яка встановлена у районі погруддя робота 1, котушка 11 виконана з можливістю обертання при самостійному транспортному переміщенні робота 1, при цьому на поясі робота 1 одягнена юбка 12 у вигляді обруча 13 з чотирма низхідними променями 14, на кінцях променів 14 розташовано по самостійно обертовому навколо вертикальної осі ролику 15, з можливістю зависання робота 1 на обручі юбки 12 при непередбаченому перекиданні робота 1 з здійсненням опори юбки 12 об ґрунт через ролики 15, в тому числі і під час руху машини-8 при буксируванні робота 1, голова робота 1 виконана у вигляді прожектора 16 для можливого підсвічування при недостатньому освітленні, а в районі очей робота 1 розташовані відеокамери 17, пов'язані з моніторами-18, розташованими біля очей оператора-9, кожна опорна поверхня стійок 2 ніг робота 1 виконана у вигляді напрямної-19, на яку посаджено повзун 20, повзун 20 пов'язаний з рамою 21, при цьому рама 21 з напрямною 19 пов'язана пружним елементом 22, рама 21 шарнірно поєднана з чотирма опорними пальцями 23, з можливістю розвороту опорних пальців 23 при русі напрямної 19 відносно рами 21 під час установки опорної стійки 2 гомілки ноги робота 1 на ґрунт, з опорою об ґрунт чотирма розвернутими пальцями 23 разом з нижньою п'ятою рами 21, при цьому у оператора 9, який розташований у корпусі машини 8, на кінцях опорних пальців 23 стійок 2 ніг та п'ят рам 21 на відміну від робота-1 розташовані ролики 24, роликами 24 ноги 63114 6 оператора 9 встановлені на увігнуту сферичну основу 25, яка розташована у корпусі машини 8, крім того пояс оператора 9 закріплений до корпусу машини 8 штангою 26, з можливістю виконання руху ходіння оператором 9 при скочуванні ніг оператора 9, одягнених у напрямні-19 з рамами 21 та роликами 24, по сферичній основі 25, при фіксації оператором 9 свого розташування відносно корпуса машини 8 (та сферичної основи 25) штангою 26, з повторенням руху елементами ніг робота 1 в його русі по поверхні ґрунту. Прив'язний робот 1 БРДМ працює наступним чином. У транспортному положенні бойової розвідувально-дозорної машини-8 (БРДМ) прив'язний робот 1 БРДМ розміщений або усередині корпусу машини 8, або зверху на корпусі машини 8. При необхідності вийти (спішитися) БРДМ зменшує свою швидкість до швидкості пішохода або зупиняється. Робот-1, керований оператором-9, виходить з машини 8 (або злазить з машини 8 ) та виконує необхідні технологічні дії під керуванням оператора 9. Так як елементи 2, 3, 4, 5, 6, 7 робота 1 пов'язані з відповідними елементами на одязі оператора 9 через електросистему машини 8, то робот 1 повторює всі рухи оператора 9. Якщо оператор 9 здійснює рухи ходіння на роликах 24 по увігнутій основі 25, та при цьому він закріплений штангою 25 до корпусу машини 8, та при цьому його ноги, які встановлені на роликах 24, скочуються по нахиленій поверхні основи 25, а в той час у робота 1, стійки 2 гомілок ніг якого розташовані на ґрунті, який має високе тертя, і вони зчеплені з ґрунтом, і при кроковому русі робота 1 він переміщується по ґрунту. Для рівноваги робота 1 на ґрунті необхідно, щоб центр мас робота 1 був розташований усередині опорного багатокутника, який повторює периметр найбільш віддалених точок відносно осі опорної стійки 2 кожної ноги робота 1, якими робот 1 опирається об ґрунт. При цьому вказаний контур при переносі стійки 2 ноги робота 1 не заважає своїй другій стійці-2 ноги робота 1, що здійснюється за рахунок розгортання та згортання опорних пальців 23 стійок 2 ніг. Розгортання здійснюється при установці стійок 2 ніг робота 1 на ґрунт при русі униз напрямних 19 відносно повзунів 20 та рам 21 та згортання при підійманні стійок 2 ніг з ґрунту та русі напрямних 19 відносно повзунів 20 та рам 21 угору за рахунок пружного елемента 22. При необачному перекиданні робота 1 він зависає на обручі 13 юбки 12. У такому положенні він взагалі транспортабельний на випадок можливого буксирування до машини 8 або за машиною 8 при поломці у випадку вимушеної евакуації як машини 8, так і робота 1. Крім того, робот 1, знаходячись у справному стані, може «самостійно» за допомогою оператора 9 піднятися з обруча 13 юбки 12, піджавши стійки 2 ніг та піднявшись на важелях 3 рук на обручі 13, а потім, розпрямивши стійки 2 ніг та піднявшись, продовжити свій подальший рух. Керування рухом робота 1 та другими його технологічними рухами здійснюється оператором 9 за рахунок рухів його частин тіла. При використанні кабелю одностороннього вигину в заданому місці робот може переміщуватися як по нахиленій, так і по вертикальній стінках у 7 мегаполісах та у гірських районах, у тому числі і галереях, колодязях, карнизах, які раніше були недосяжні крім спеціально розробленої для такого руху техніки. Застосування бронетанкової техніки з двома та більше прив'язними роботами БРДМ дозволить перелаштувати бронемашину, яка належить до танкових підрозділів у загальновійськову бронемашину, яка включає в себе як елементи піхотного підрозділу - прив'язні роботи БРДМ, так і артилерійсько-стрілецькі елементи - гармати та кулемети, що підвищить ефективність як перших, так і других. Кім того, прив'язні роботи БРДМ можуть бути використані в тому числі і для збільшення технічних показників машини, при подоланні перешкод, так як двома роботами можливий підйом та перенос машини через перешкоду, висота якої дорівнює висоті підіймання рук роботами. Комп’ютерна верстка Мацело М. 63114 8 Окрім цього, прив'язний робот БРДМ може за допомогою оператора переміщувати великі вагогабаритні вантажі зі значно більшою ефективністю ніж існуючі підйомно-транспортні машини. Техніко-економічний ефект використання прив'язного робота БРДМ розширить сферу використання як бронетехніки, так і робототехніки, об'єднавши вказані сфери разом, що зменшить численний склад корпусу сухопутних військ при підвищенні ефективності їхнього застосування, підвищить прохідність бронетехніки, зробить можливим рух по вертикальних стінках у мегаполісах та гірських районах, зробить досяжними галереї, колодязі, карнизи при ліквідації аварійних та надзвичайних ситуацій, при рятувальних роботах, зменшить експлуатаційні витрати завантажувально-розвантажувальних робіт у виробництві (на заводах та складах при переміщенні вагогабаритних вантажів). Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюTethered robot of brdm
Автори англійськоюChuhui Volodymyr Leonidovych
Назва патенту російськоюПривязной робот брдм
Автори російськоюЧугуй Владимир Леонидович
МПК / Мітки
МПК: F41H 7/00
Мітки: робот, брдм-2, прив'язний
Код посилання
<a href="https://ua.patents.su/4-63114-privyaznijj-robot-brdm.html" target="_blank" rel="follow" title="База патентів України">Прив’язний робот брдм</a>
Колісний бронетранспортер “хазар” типу брдм-2
Номер патенту: 33637
Опубліковано: 10.07.2008
Автори: Таран Микола Володимирович, Таран Володимир Миколайович, Волонтирець Володимир Степанович, Григор'єва Ольга Василівна, Швець Олександр Михайлович, Рафес Юрій Миколайович
МПК: B62D 63/00, B62D 39/00, F41A 23/00, B62D 33/00, B62D 55/00, F41H 7/00
Мітки: брдм-2, колісний, хазар, бронетранспортер, типу
Формула / Реферат:
1. Колісний бронетранспортер, що містить корпус, розділений конструктивно на відділення керування, бойове відділення та відділення силової установки, башту з розміщеними на ній озброєнням і прицілом, встановлену на даху корпусу на підбашенному листі, механізм повороту башти, сидіння командира, механіка-водія та особового складу, встановлені відповідно усередині відділення керування та бойового відділення, денні, нічні та комбіновані прилади...
Автономний робот
Номер патенту: 94408
Опубліковано: 10.05.2011
Автори: Чуприняк Рафал, Янік Бартоломєй
МПК: B25J 19/00, B25J 11/00, B25J 13/08, G05B 11/01, G05B 19/414
Мітки: автономний, робот
Формула / Реферат:
1. Автономний робот, оснащений системою керування, камерою візуального спостереження, мікрофонами, приймально-передавальним пристроєм і системою приводу, розміщеними усередині корпуса, який відрізняється тим, що корпус (15) складається із двох куполів (5, 6), з'єднаних між собою рознімним з'єднанням і закритих з однієї сторони, на зовнішніх стінках яких розміщені обвідні кільця (13, 14), а усередині кожного купола (5, 6) розміщена система...
Підводний робот
Номер патенту: 26282
Опубліковано: 10.09.2007
Автори: Пишнєв Сергій Миколайович, Родічева Надія Іванівна, Данильченко Ігор Євгенович, Данильченко Наталя В'ячеславівна
МПК: B63G 8/00
Формула / Реферат:
Підводний робот, що має міцні корпуси, корпус з відеокамерою, рушійні пристрої, корпус з технологічним обладнанням, який відрізняється тим, що окремі конструктивні елементи виконані у вигляді функціональних модулів і з'єднані між собою за допомогою з'єднувального модуля з універсальним вузлом кріплення.
Мобільний робот
Номер патенту: 93038
Опубліковано: 10.01.2011
Автор: Чуприняк Рафал
МПК: B25J 15/02, B60K 31/00, B62D 55/08, B60K 26/00
Формула / Реферат:
Мобільний робот, оснащений системами приводу і керування, а також маніпулятором, розміщеними на мобільній гусеничній платформі, що має передню гусеницю зі змінюваним кутом нахилу, призначений для нейтралізації підривних пристроїв і для проведення експертних перевірок, який відрізняється тим, що передня гусениця (2) оснащена натяжним пристроєм (1), що має телескопічний кронштейн (18'), з'єднаний із втулкою (13), у якій розміщені підшипники...
Здвоєний модульно структурований військовий наземний робот
Номер патенту: 88833
Опубліковано: 25.11.2009
Автори: Поповіченко Олександр Вікторович, Лещенко Олег Іванович, Толстой Олексій Володимирович, Беліков Віктор Тріфонович
МПК: F41H 7/00
Мітки: наземний, військовий, робот, структурований, здвоєний, модульної
Формула / Реферат:
1. Здвоєний модульно структурований наземний військовий робот для ведення бойових і спеціальних операцій, що має необхідний комплект виконавчої апаратури і пристроїв у вигляді електрохімічних або накопичувальних джерел електричної енергії, її перетворювачів, електромеханічних рушіїв колісного, гусеничного або комбінованого типів, набору датчиків, аналізаторів зовнішньої обстановки, маніпуляторів, озброєння з прицілами, який відрізняється тим,...
Попередній патент: Пристрій для кріплення електричного кабелю
Наступний патент: Спосіб місцевого лікування ускладненого синдрому діабетичної стопи
Випадковий патент: Друкарське видання