Автономний робот
Формула / Реферат
1. Автономний робот, оснащений системою керування, камерою візуального спостереження, мікрофонами, приймально-передавальним пристроєм і системою приводу, розміщеними усередині корпуса, який відрізняється тим, що корпус (15) складається із двох куполів (5, 6), з'єднаних між собою рознімним з'єднанням і закритих з однієї сторони, на зовнішніх стінках яких розміщені обвідні кільця (13, 14), а усередині кожного купола (5, 6) розміщена система приводу, що включає редуктор (3), на корпусі якого закріплений приводний електродвигун (2), зубчасте колесо (10) якого закріплено на вихідному валу (4), що з однієї сторони розміщений у втулці (9), закріпленій на внутрішній стінці купола (5, 6), а з іншої сторони опирається на гнізда (12), розміщені усередині корпуса (1), між якими розміщена пружина (11), при цьому один купол (5) оснащений внутрішнім кільцем (7), на ободі якого передбачені виступи (7а), а другий купол (6) оснащений внутрішнім кільцем (8), на ободі якого передбачені пази (8а), розташування і форма яких відповідає розташуванню і формі виступів (7) на ободі внутрішнього кільця купола (5).
2. Автономний робот за п. 1, який відрізняється тим, що редуктор (3) виконаний, переважно, у вигляді планетарного редуктора.
Текст
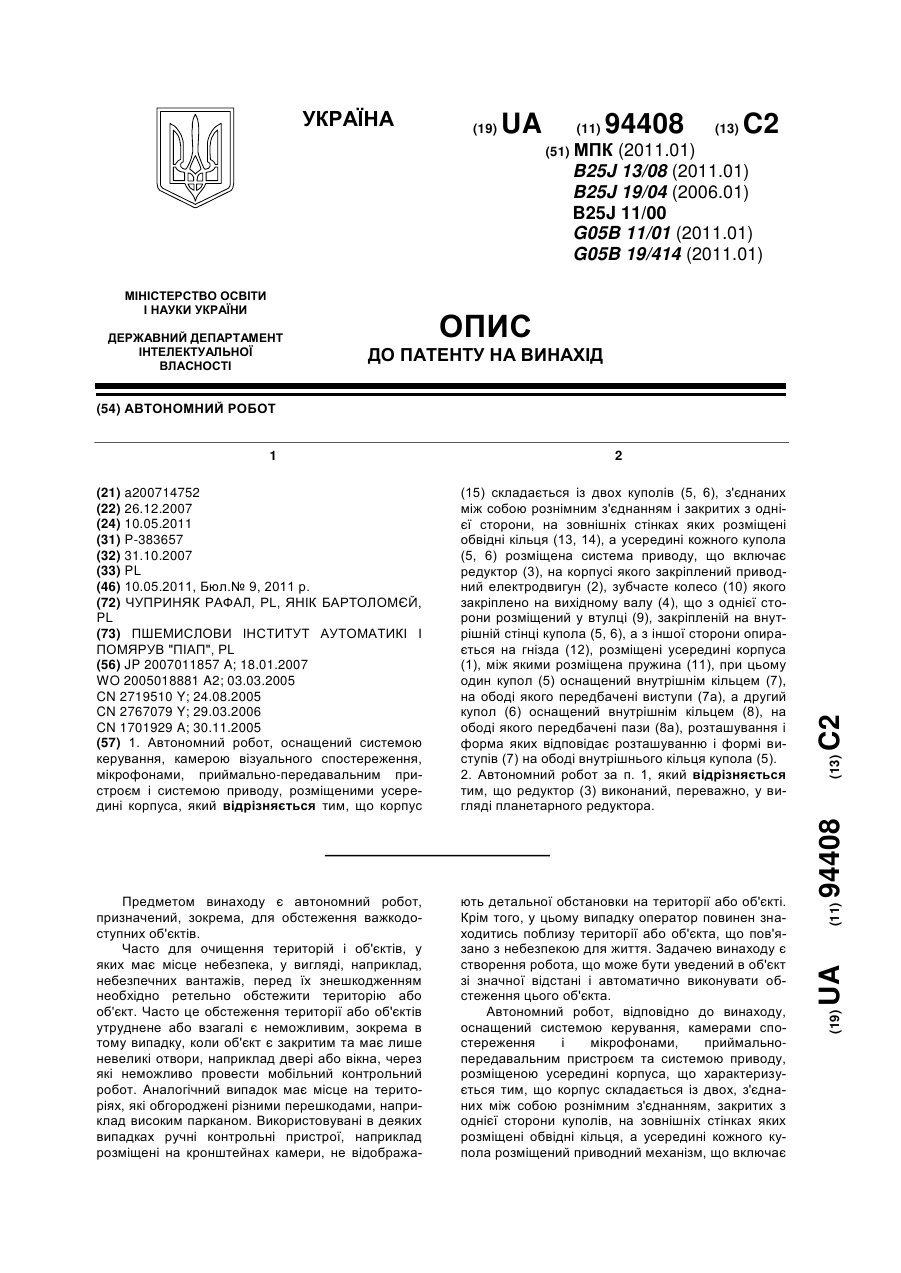
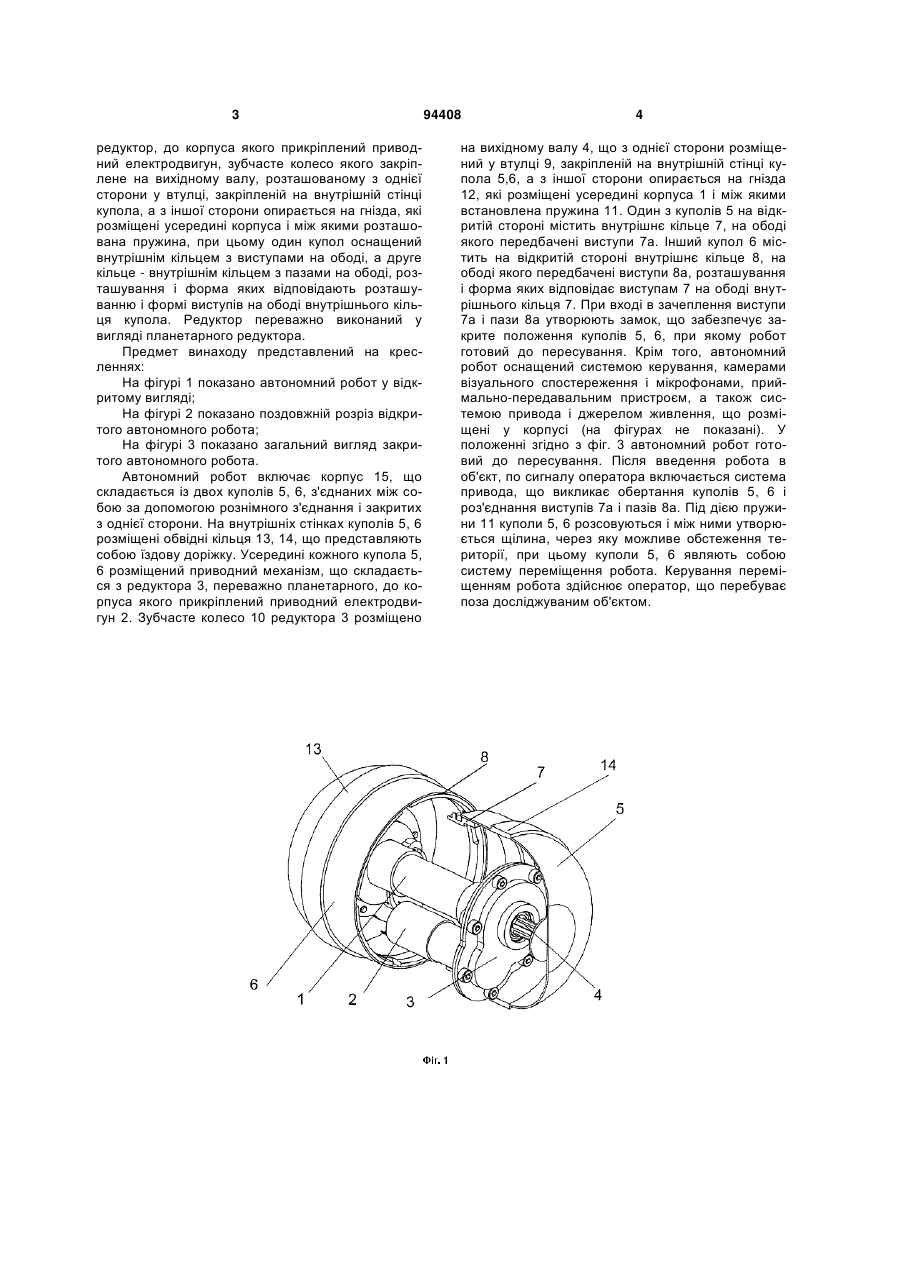
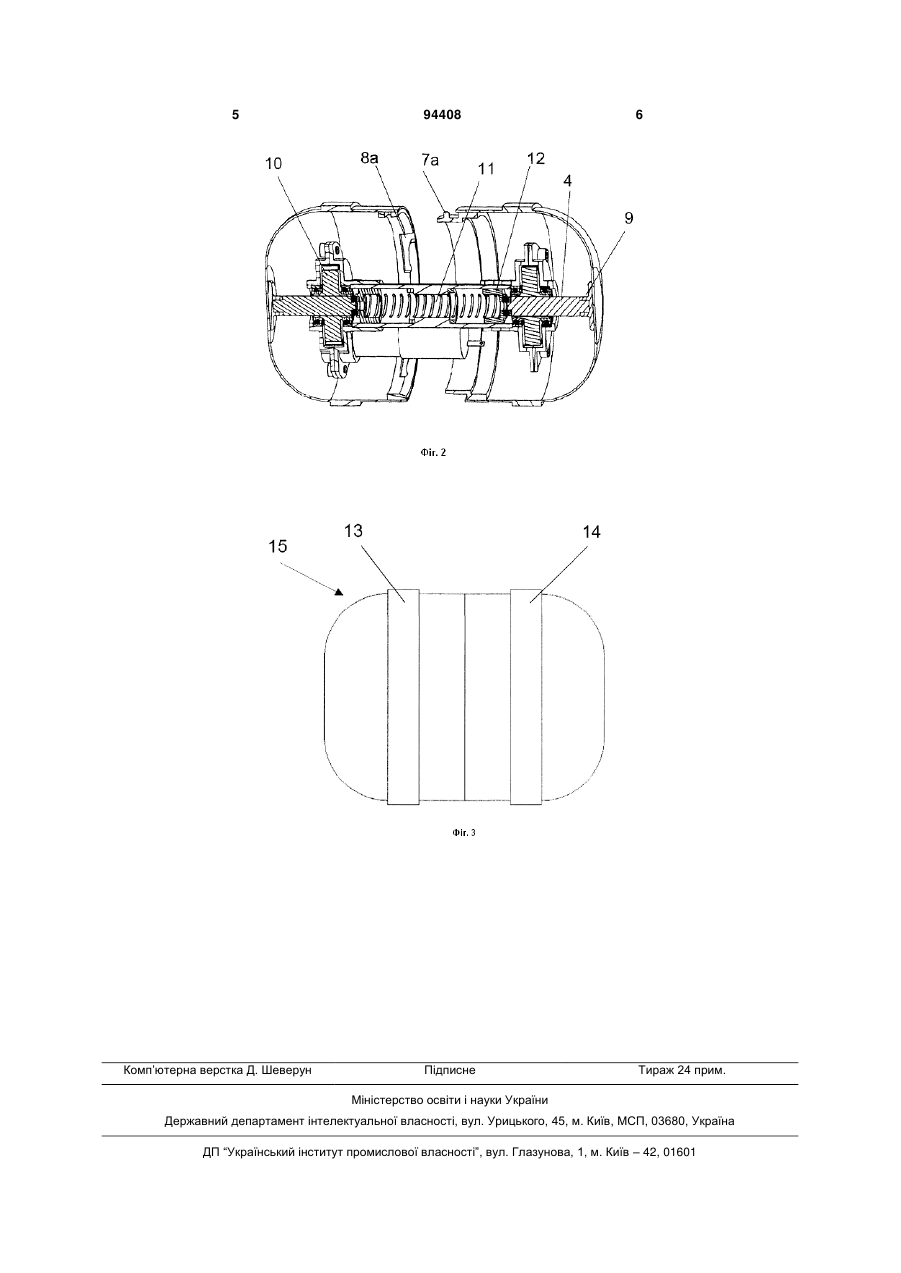
1. Автономний робот, оснащений системою керування, камерою візуального спостереження, мікрофонами, приймально-передавальним пристроєм і системою приводу, розміщеними усередині корпуса, який відрізняється тим, що корпус C2 2 (19) 1 3 редуктор, до корпуса якого прикріплений приводний електродвигун, зубчасте колесо якого закріплене на вихідному валу, розташованому з однієї сторони у втулці, закріпленій на внутрішній стінці купола, а з іншої сторони опирається на гнізда, які розміщені усередині корпуса і між якими розташована пружина, при цьому один купол оснащений внутрішнім кільцем з виступами на ободі, а друге кільце - внутрішнім кільцем з пазами на ободі, розташування і форма яких відповідають розташуванню і формі виступів на ободі внутрішнього кільця купола. Редуктор переважно виконаний у вигляді планетарного редуктора. Предмет винаходу представлений на кресленнях: На фігурі 1 показано автономний робот у відкритому вигляді; На фігурі 2 показано поздовжній розріз відкритого автономного робота; На фігурі 3 показано загальний вигляд закритого автономного робота. Автономний робот включає корпус 15, що складається із двох куполів 5, 6, з'єднаних між собою за допомогою рознімного з'єднання і закритих з однієї сторони. На внутрішніх стінках куполів 5, 6 розміщені обвідні кільця 13, 14, що представляють собою їздову доріжку. Усередині кожного купола 5, 6 розміщений приводний механізм, що складається з редуктора 3, переважно планетарного, до корпуса якого прикріплений приводний електродвигун 2. Зубчасте колесо 10 редуктора 3 розміщено 94408 4 на вихідному валу 4, що з однієї сторони розміщений у втулці 9, закріпленій на внутрішній стінці купола 5,6, а з іншої сторони опирається на гнізда 12, які розміщені усередині корпуса 1 і між якими встановлена пружина 11. Один з куполів 5 на відкритій стороні містить внутрішнє кільце 7, на ободі якого передбачені виступи 7а. Інший купол 6 містить на відкритій стороні внутрішнє кільце 8, на ободі якого передбачені виступи 8а, розташування і форма яких відповідає виступам 7 на ободі внутрішнього кільця 7. При вході в зачеплення виступи 7а і пази 8а утворюють замок, що забезпечує закрите положення куполів 5, 6, при якому робот готовий до пересування. Крім того, автономний робот оснащений системою керування, камерами візуального спостереження і мікрофонами, приймально-передавальним пристроєм, а також системою привода і джерелом живлення, що розміщені у корпусі (на фігурах не показані). У положенні згідно з фіг. 3 автономний робот готовий до пересування. Після введення робота в об'єкт, по сигналу оператора включається система привода, що викликає обертання куполів 5, 6 і роз'єднання виступів 7а і пазів 8а. Під дією пружини 11 куполи 5, 6 розсовуються і між ними утворюється щілина, через яку можливе обстеження території, при цьому куполи 5, 6 являють собою систему переміщення робота. Керування переміщенням робота здійснює оператор, що перебуває поза досліджуваним об'єктом. 5 Комп’ютерна верстка Д. Шеверун 94408 6 Підписне Тираж 24 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAutonomous robot
Автори англійськоюCzupryniak Rafal, Janik Bartlomiej
Назва патенту російськоюАвтономный робот
Автори російськоюЧуприняк Рафал, Яник Бартоломей
МПК / Мітки
МПК: B25J 11/00, B25J 19/00, G05B 19/414, G05B 11/01, B25J 13/08
Мітки: робот, автономний
Код посилання
<a href="https://ua.patents.su/3-94408-avtonomnijj-robot.html" target="_blank" rel="follow" title="База патентів України">Автономний робот</a>
Мобільний робот
Номер патенту: 93038
Опубліковано: 10.01.2011
Автор: Чуприняк Рафал
МПК: B60K 26/00, B25J 15/02, B60K 31/00, B62D 55/08
Формула / Реферат:
Мобільний робот, оснащений системами приводу і керування, а також маніпулятором, розміщеними на мобільній гусеничній платформі, що має передню гусеницю зі змінюваним кутом нахилу, призначений для нейтралізації підривних пристроїв і для проведення експертних перевірок, який відрізняється тим, що передня гусениця (2) оснащена натяжним пристроєм (1), що має телескопічний кронштейн (18'), з'єднаний із втулкою (13), у якій розміщені підшипники...
Автономний комплекс для виділення води з атмосферного повітря
Номер патенту: 49865
Опубліковано: 11.05.2010
Автори: Чернов Володимир Олексійович, Макаров Артур Ардавасович
МПК: E03D 3/00
Мітки: комплекс, атмосферного, води, виділення, автономний, повітря
Формула / Реферат:
1. Автономний комплекс для видалення води з атмосферного повітря, що містить прозорий для сонячного випромінювання купол, який встановлено над поверхнею землі та оснащено вертикальною витяжною трубою, яка примикає до його вершини, теплонагромаджувач, який розміщено усередині купола, теплообмінник, розташований нижче поверхні землі, при цьому теплообмінник контактує з джерелом холоду, повітровід, що підводить атмосферне повітря до...
Підводний робот
Номер патенту: 26282
Опубліковано: 10.09.2007
Автори: Пишнєв Сергій Миколайович, Данильченко Наталя В'ячеславівна, Данильченко Ігор Євгенович, Родічева Надія Іванівна
МПК: B63G 8/00
Формула / Реферат:
Підводний робот, що має міцні корпуси, корпус з відеокамерою, рушійні пристрої, корпус з технологічним обладнанням, який відрізняється тим, що окремі конструктивні елементи виконані у вигляді функціональних модулів і з'єднані між собою за допомогою з'єднувального модуля з універсальним вузлом кріплення.
Промисловий робот
Номер патенту: 67181
Опубліковано: 15.06.2004
Автори: Бергер Євгеній Емильович, Бергер Еміль Григорович, Осадчий Володимир Степанович
МПК: B25J 11/00
Мітки: робот, промисловий
Формула / Реферат:
Промисловий робот, що містить опору, вертикальну і горизонтальну каретки, механічну руку із схватом, виконану у вигляді куліси, і гвинтову пару, гайка якої зв'язана з горизонтальною кареткою, який відрізняється тим, що він обладнаний зв'язаною з горизонтальною кареткою і встановленою в поворотному камені кулісою з профільованим кулачком, який зв'язаний за допомогою штовхача з вертикальною кареткою, при цьому поворотний камінь на важелі, схват...
Поперечно здвоєний модульний військовий наземний робот
Номер патенту: 93255
Опубліковано: 25.01.2011
Автори: Толстой Олексій Володимирович, Поповіченко Олександр Вікторович, Васильєв Валерій Валентинович, Бєліков Віктор Трифонович
МПК: F41H 7/00
Мітки: військовий, поперечної, модульний, наземний, робот, здвоєний
Формула / Реферат:
1. Поперечно здвоєний модульний військовий наземний робот, забезпечений електрохімічними, конденсаторними або комбінованими джерелами електричної енергії, її перетворювачами, електромеханічними колісними, гусеничними або комбінованими колісно-гусеничними рушіями, комплексами датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики, прицільними пристосуваннями і озброєнням, а так само виконавчими механізмами, зокрема...
Попередній патент: Спосіб і пристрій для безпровідного зв’язку з декількома несучими
Наступний патент: Магнітні гальма безпеки для транспортних засобів з живленням від акумулятора
Випадковий патент: Привод вала відтягування трикотажного полотна плосков'язальної машини