Пристрій для ідентифікації сигналів об’єкта і моделі
Формула / Реферат
Пристрій для ідентифікації сигналів об'єкта і моделі, що виконаний у вигляді блока, який містить модулятор, підсилювач, коливальний контур, генератор синусоїдальних коливань, який відрізняється тим, що він містить два вхідних ланцюга для частотної модуляції сигналів з об’єкта і моделі, перший з яких включає керований генератор синусоїдальних коливань, вихід якого з’єднаний з активним опором коливального контуру, який в свою чергу, з керованою індуктивністю створює другий вхідний ланцюг (для частотної модуляції), а виходом цього блока є підсилювач, охоплений позитивним зворотним зв’язком, який з’єднує вихід підсилювача через дільник напруги з об’єднаною точкою послідовно включених в коливальний контур ємностей, при цьому, в блок для вхідних ланцюгів введені ланцюги підстройки.
Текст
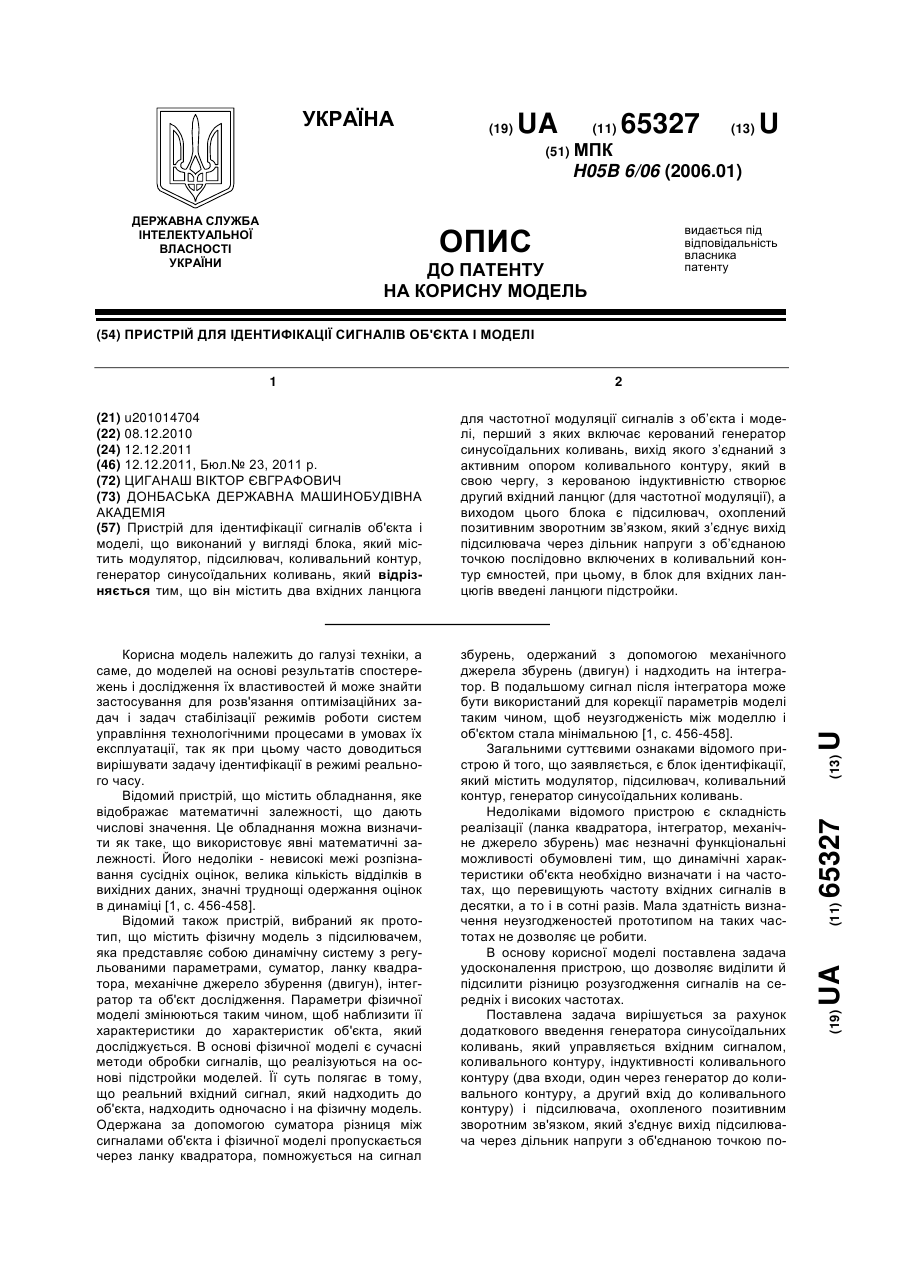
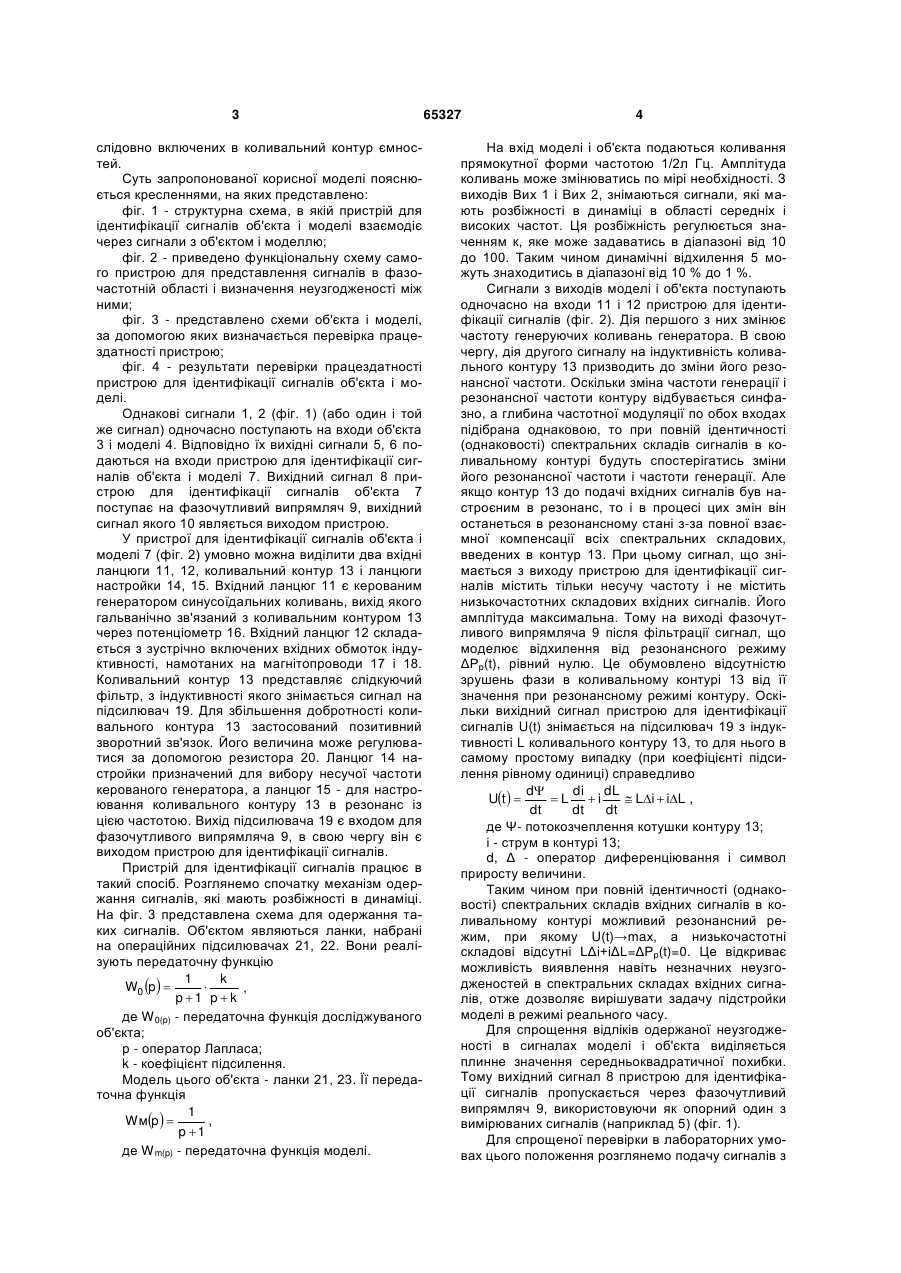
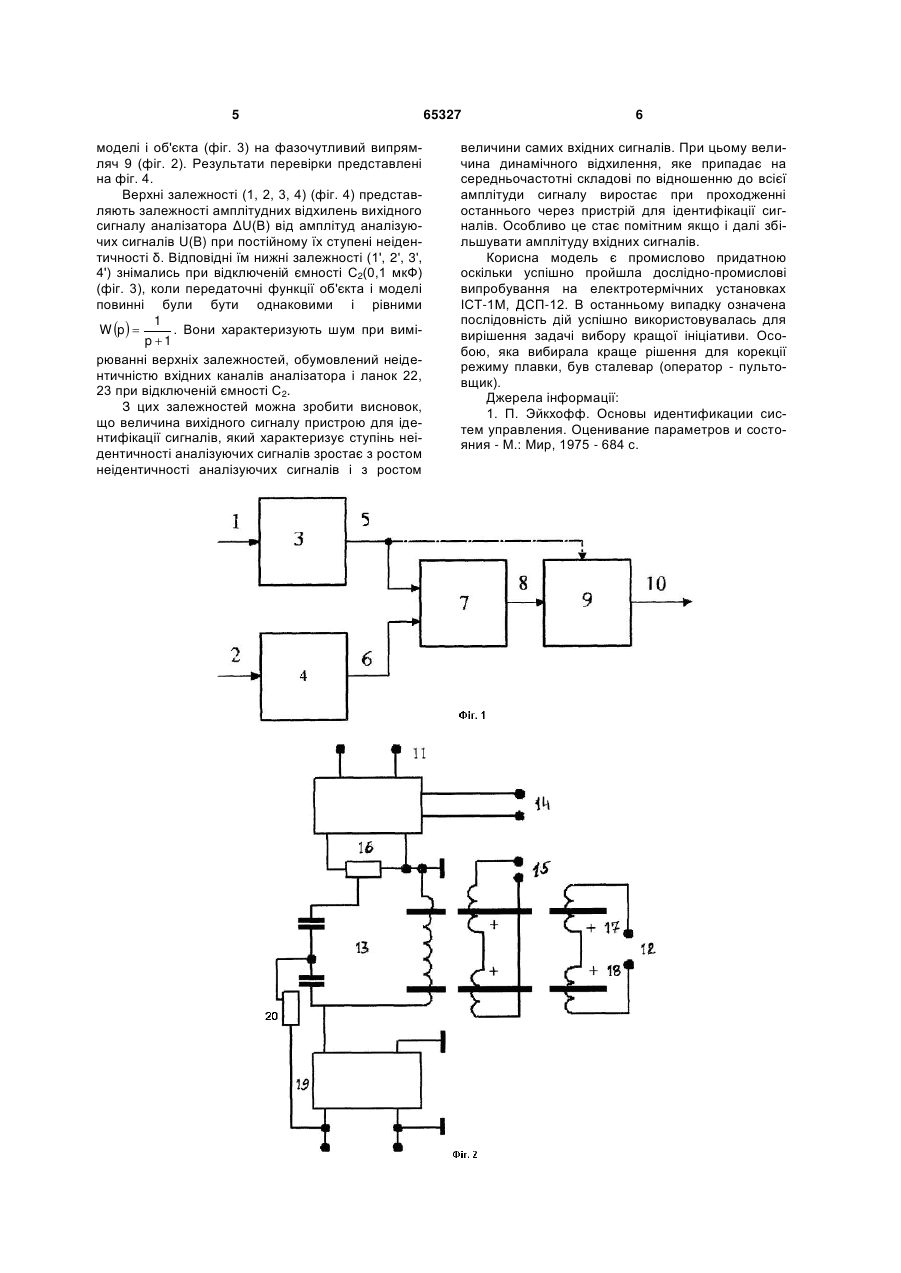
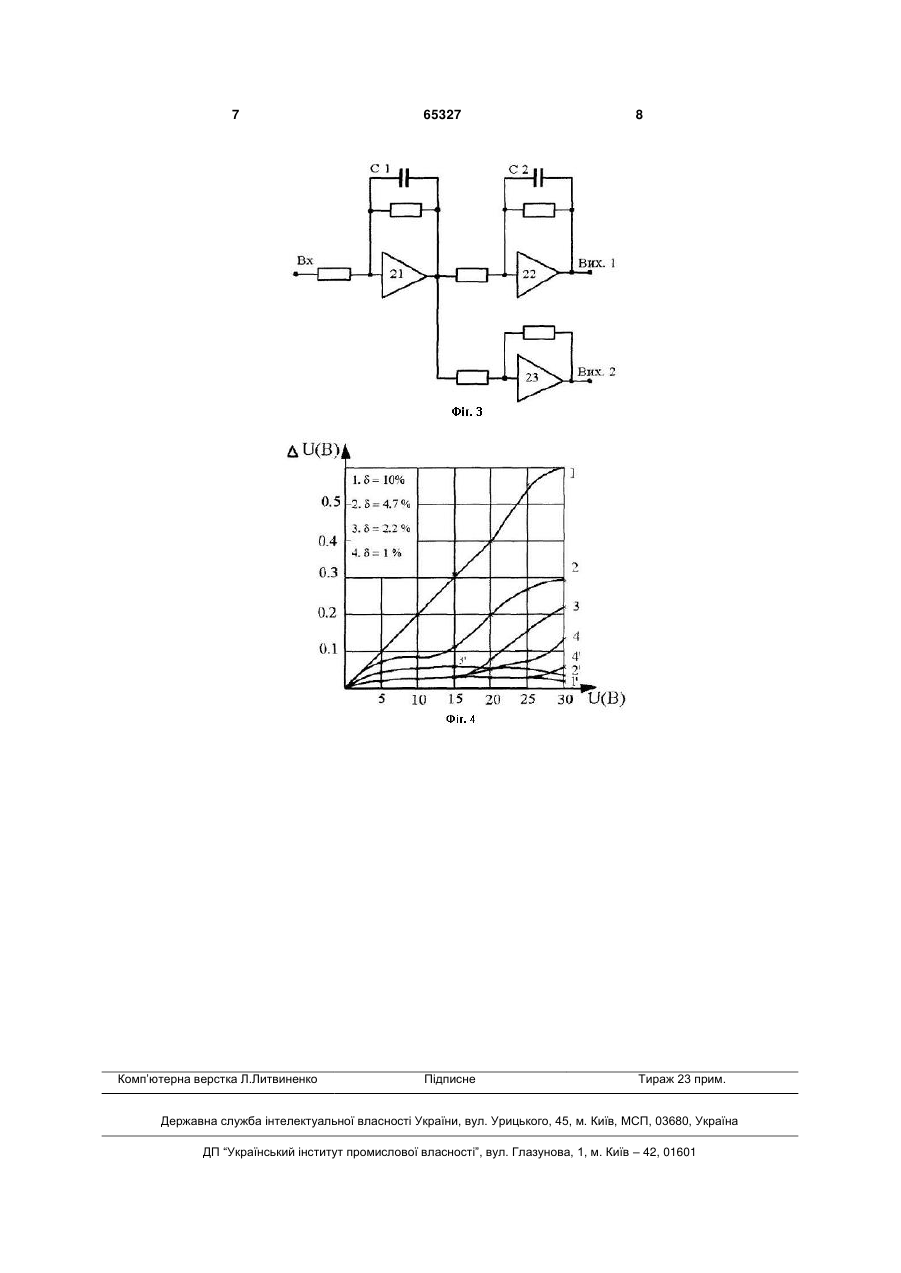
Пристрій для ідентифікації сигналів об'єкта і моделі, що виконаний у вигляді блока, який містить модулятор, підсилювач, коливальний контур, генератор синусоїдальних коливань, який відрізняється тим, що він містить два вхідних ланцюга 3 слідовно включених в коливальний контур ємностей. Суть запропонованої корисної моделі пояснюється кресленнями, на яких представлено: фіг. 1 - структурна схема, в якій пристрій для ідентифікації сигналів об'єкта і моделі взаємодіє через сигнали з об'єктом і моделлю; фіг. 2 - приведено функціональну схему самого пристрою для представлення сигналів в фазочастотній області і визначення неузгодженості між ними; фіг. 3 - представлено схеми об'єкта і моделі, за допомогою яких визначається перевірка працездатності пристрою; фіг. 4 - результати перевірки працездатності пристрою для ідентифікації сигналів об'єкта і моделі. Однакові сигнали 1, 2 (фіг. 1) (або один і той же сигнал) одночасно поступають на входи об'єкта 3 і моделі 4. Відповідно їх вихідні сигнали 5, 6 подаються на входи пристрою для ідентифікації сигналів об'єкта і моделі 7. Вихідний сигнал 8 пристрою для ідентифікації сигналів об'єкта 7 поступає на фазочутливий випрямляч 9, вихідний сигнал якого 10 являється виходом пристрою. У пристрої для ідентифікації сигналів об'єкта і моделі 7 (фіг. 2) умовно можна виділити два вхідні ланцюги 11, 12, коливальний контур 13 і ланцюги настройки 14, 15. Вхідний ланцюг 11 є керованим генератором синусоїдальних коливань, вихід якого гальванічно зв'язаний з коливальним контуром 13 через потенціометр 16. Вхідний ланцюг 12 складається з зустрічно включених вхідних обмоток індуктивності, намотаних на магнітопроводи 17 і 18. Коливальний контур 13 представляє слідкуючий фільтр, з індуктивності якого знімається сигнал на підсилювач 19. Для збільшення добротності коливального контура 13 застосований позитивний зворотний зв'язок. Його величина може регулюватися за допомогою резистора 20. Ланцюг 14 настройки призначений для вибору несучої частоти керованого генератора, а ланцюг 15 - для настроювання коливального контуру 13 в резонанс із цією частотою. Вихід підсилювача 19 є входом для фазочутливого випрямляча 9, в свою чергу він є виходом пристрою для ідентифікації сигналів. Пристрій для ідентифікації сигналів працює в такий спосіб. Розглянемо спочатку механізм одержання сигналів, які мають розбіжності в динаміці. На фіг. 3 представлена схема для одержання таких сигналів. Об'єктом являються ланки, набрані на операційних підсилювачах 21, 22. Вони реалізують передаточну функцію 1 k W0 p , p 1 p k де W 0(p) - передаточна функція досліджуваного об'єкта; р - оператор Лапласа; k - коефіцієнт підсилення. Модель цього об'єкта - ланки 21, 23. Її передаточна функція 1 Wмp , p 1 де W m(p) - передаточна функція моделі. 65327 4 На вхід моделі і об'єкта подаються коливання прямокутної форми частотою 1/2л Гц. Амплітуда коливань може змінюватись по мірі необхідності. З виходів Вих 1 і Вих 2, знімаються сигнали, які мають розбіжності в динаміці в області середніх і високих частот. Ця розбіжність регулюється значенням к, яке може задаватись в діапазоні від 10 до 100. Таким чином динамічні відхилення 5 можуть знаходитись в діапазоні від 10 % до 1 %. Сигнали з виходів моделі і об'єкта поступають одночасно на входи 11 і 12 пристрою для ідентифікації сигналів (фіг. 2). Дія першого з них змінює частоту генеруючих коливань генератора. В свою чергу, дія другого сигналу на індуктивність коливального контуру 13 призводить до зміни його резонансної частоти. Оскільки зміна частоти генерації і резонансної частоти контуру відбувається синфазно, а глибина частотної модуляції по обох входах підібрана однаковою, то при повній ідентичності (однаковості) спектральних складів сигналів в коливальному контурі будуть спостерігатись зміни його резонансної частоти і частоти генерації. Але якщо контур 13 до подачі вхідних сигналів був настроєним в резонанс, то і в процесі цих змін він останеться в резонансному стані з-за повної взаємної компенсації всіх спектральних складових, введених в контур 13. При цьому сигнал, що знімається з виходу пристрою для ідентифікації сигналів містить тільки несучу частоту і не містить низькочастотних складових вхідних сигналів. Його амплітуда максимальна. Тому на виході фазочутливого випрямляча 9 після фільтрації сигнал, що моделює відхилення від резонансного режиму ΔPp(t), рівний нулю. Це обумовлено відсутністю зрушень фази в коливальному контурі 13 від її значення при резонансному режимі контуру. Оскільки вихідний сигнал пристрою для ідентифікації сигналів U(t) знімається на підсилювач 19 з індуктивності L коливального контуру 13, то для нього в самому простому випадку (при коефіцієнті підсилення рівному одиниці) справедливо d di dL Ut L i Li iL , dt dt dt де Ψ- потокозчеплення котушки контуру 13; і - струм в контурі 13; d, Δ - оператор диференціювання і символ приросту величини. Таким чином при повній ідентичності (однаковості) спектральних складів вхідних сигналів в коливальному контурі можливий резонансний режим, при якому U(t)→max, a низькочастотні складові відсутні LΔi+iΔL=ΔPp(t)=0. Це відкриває можливість виявлення навіть незначних неузгодженостей в спектральних складах вхідних сигналів, отже дозволяє вирішувати задачу підстройки моделі в режимі реального часу. Для спрощення відліків одержаної неузгодженості в сигналах моделі і об'єкта виділяється плинне значення середньоквадратичної похибки. Тому вихідний сигнал 8 пристрою для ідентифікації сигналів пропускається через фазочутливий випрямляч 9, використовуючи як опорний один з вимірюваних сигналів (наприклад 5) (фіг. 1). Для спрощеної перевірки в лабораторних умовах цього положення розглянемо подачу сигналів з 5 моделі і об'єкта (фіг. 3) на фазочутливий випрямляч 9 (фіг. 2). Результати перевірки представлені на фіг. 4. Верхні залежності (1, 2, 3, 4) (фіг. 4) представляють залежності амплітудних відхилень вихідного сигналу аналізатора ΔU(В) від амплітуд аналізуючих сигналів U(B) при постійному їх ступені неідентичності δ. Відповідні їм нижні залежності (1', 2', 3', 4') знімались при відключеній ємності С2(0,1 мкФ) (фіг. 3), коли передаточні функції об'єкта і моделі повинні були бути однаковими і рівними 1 W p . Вони характеризують шум при виміp 1 рюванні верхніх залежностей, обумовлений неідентичністю вхідних каналів аналізатора і ланок 22, 23 при відключеній ємності С2. З цих залежностей можна зробити висновок, що величина вихідного сигналу пристрою для ідентифікації сигналів, який характеризує ступінь неідентичності аналізуючих сигналів зростає з ростом неідентичності аналізуючих сигналів і з ростом 65327 6 величини самих вхідних сигналів. При цьому величина динамічного відхилення, яке припадає на середньочастотні складові по відношенню до всієї амплітуди сигналу виростає при проходженні останнього через пристрій для ідентифікації сигналів. Особливо це стає помітним якщо і далі збільшувати амплітуду вхідних сигналів. Корисна модель є промислово придатною оскільки успішно пройшла дослідно-промислові випробування на електротермічних установках ІСТ-1М, ДСП-12. В останньому випадку означена послідовність дій успішно використовувалась для вирішення задачі вибору кращої ініціативи. Особою, яка вибирала краще рішення для корекції режиму плавки, був сталевар (оператор - пультовщик). Джерела інформації: 1. П. Эйкхофф. Основы идентификации систем управления. Оценивание параметров и состояния - М.: Мир, 1975 - 684 с. 7 Комп’ютерна верстка Л.Литвиненко 65327 8 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for identification of object and models signals
Автори англійськоюTsyhanash Viktor Yevhrafovych
Назва патенту російськоюУстройство для идентификации сигналов объекта и модели
Автори російськоюЦыганаш Виктор Евграфович
МПК / Мітки
МПК: H05B 6/06
Мітки: сигналів, ідентифікації, пристрій, об'єкта, моделі
Код посилання
<a href="https://ua.patents.su/4-65327-pristrijj-dlya-identifikaci-signaliv-obehkta-i-modeli.html" target="_blank" rel="follow" title="База патентів України">Пристрій для ідентифікації сигналів об’єкта і моделі</a>
Спосіб ідентифікації сигналів
Номер патенту: 52045
Опубліковано: 10.08.2010
Автор: Циганаш Віктор Євграфович
МПК: H05B 6/06
Мітки: спосіб, сигналів, ідентифікації
Формула / Реферат:
Спосіб ідентифікації сигналів, який полягає у вимірюванні сигналів об'єкта і моделі, перетворенні їх у сигнали, пропорційні обмірюваним, який відрізняється тим, що вимірювані сигнали синхронно переводяться в фазочастотну область і визначається кореляційний взаємозв'язок між ними за допомогою керованого коливального контуру, реалізованого на основі ємності, керованої індуктивності і підсилювача, при цьому перший сигнал перетворюється у...
Система ідентифікації моделі із змінною структурою
Номер патенту: 69178
Опубліковано: 16.08.2004
Автори: Кишенько Василь Дмитрович, Іващук Вячеслав Віталійович, Ладанюк Анатолій Петрович
МПК: G05B 13/00
Мітки: змінною, система, структурою, моделі, ідентифікації
Формула / Реферат:
Система ідентифікації моделі із змінною структурою, що містить блок формування коефіцієнтів підсилення, яка відрізняється тим, що містить сегментатор, задавальний генератор, що синхронізує відбір вибірок інформаційних послідовностей за часом та коригує час синхронізації з блоком розпізнавання образів, де відбувається порівняння поведінки сигналів за частотою та часом після перетворення інформаційних послідовностей блоком селекції образів.
Пристрій подавання сигналів ідентифікації та спосіб його застосування
Номер патенту: 81142
Опубліковано: 10.12.2007
Автори: Базиленко Валерій Володимирович, Чунь Анатолій Миколайович, Соболєв Сергій Олегович, Купрієнко Олександр Михайлович
МПК: B60R 25/00, G08B 13/14, B60R 25/10, G08B 15/00, G08B 31/00, E05B 51/00, G08C 17/00, H04Q 7/24, B60R 25/04, E05B 49/00, G08C 19/00
Мітки: подавання, пристрій, спосіб, сигналів, застосування, ідентифікації
Формула / Реферат:
1. Пристрій подавання сигналів ідентифікації, передавач якого здійснює передавання сигналів у постійному режимі або по запиту пристрою приймання та ототожнення сигналів, установленого на об'єкті охорони, який відрізняється тим, що його оснащено органами керування режимами подавання сигналів, які виконано у вигляді давача, чутливого до переміщень або вібрацій, причому органи керування підключено до пристрою перетворення сигналів, до якого...
Пристрій ідентифікації та аналізу тактильних сигналів для інформаційно-керуючої системи адаптивного робота

Номер патенту: 40710
Опубліковано: 27.04.2009
Автори: Шишкін Олександр Сергійович, Кондратенко Юрій Пантелійович, Запорожець Юрій Михайлович, Кондратенко Галина Володимирівна
МПК: B25J 19/02
Мітки: інформаційно-керуючої, сигналів, адаптивного, ідентифікації, аналізу, пристрій, тактильних, системі, робота
Формула / Реферат:
Пристрій ідентифікації та аналізу тактильних сигналів для комп'ютерної інформаційно-керуючої системи адаптивного робота з одним входом та трьома виходами, що має у своєму складі послідовно з'єднані перший датчик проковзування деталі й перший підсилювач, тактильний датчик, встановлений на одній з губок захвата робота, перший блок затримки, привід губок захвата, перший елемент АБО, послідовно з'єднані перший RS-тригер, інтегратор, перший...
Спосіб кепстральної ідентифікації сигналів
Номер патенту: 88208
Опубліковано: 25.09.2009
Автори: Кузнецов Максим Володимирович, Селетков Віктор Леонідович
МПК: G01H 11/00, G01V 1/00, G10L 11/00
Мітки: кепстральної, спосіб, сигналів, ідентифікації
Формула / Реферат:
Спосіб кепстральної ідентифікації сигналів, за яким проводять низькочастотну фільтрацію сигналу в смузі частот аналізу, розділяють сигнал на сегменти аналізу однакової тривалості, узгодженої з інтервалом кореляції сигналу, формують на кожному сегменті аналізу значення дискретних часових відліків сигналу шляхом застосування стандартного аналого-цифрового перетворення з частотою дискретизації за часом, узгодженою зі смугою частот аналізу...
Попередній патент: Ендоскопічний пристрій
Наступний патент: Апаратура передачі команд релейного захисту та протиаварійної автоматики по високочастотних каналах “калина”
Випадковий патент: Термопластичний пінопласт з частинок та спосіб його одержання