Пристрій ідентифікації та аналізу тактильних сигналів для інформаційно-керуючої системи адаптивного робота
Номер патенту: 40710
Опубліковано: 27.04.2009
Автори: Запорожець Юрій Михайлович, Шишкін Олександр Сергійович, Кондратенко Юрій Пантелійович, Кондратенко Галина Володимирівна



Формула / Реферат
Пристрій ідентифікації та аналізу тактильних сигналів для комп'ютерної інформаційно-керуючої системи адаптивного робота з одним входом та трьома виходами, що має у своєму складі послідовно з'єднані перший датчик проковзування деталі й перший підсилювач, тактильний датчик, встановлений на одній з губок захвата робота, перший блок затримки, привід губок захвата, перший елемент АБО, послідовно з'єднані перший RS-тригер, інтегратор, перший пороговий елемент, другий блок затримки й другий елемент АБО, послідовно з'єднані лічильник, цифро-аналоговий перетворювач, перший суматор, другий ключ, дільник напруги, другий суматор, перший ключ і перший підсилювач потужності, а також другий пороговий елемент, джерело опорної напруги й послідовно з'єднані другий RS-тригер і третій елемент АБО, вихід якого з'єднаний з керуючим входом першого ключа, при цьому вихід тактильного датчика підключений до перших входів першого елемента АБО й першого RS-тригера, вихід першого підсилювача підключено до другого входу першого елемента АБО, перший вхід лічильника підключений до другого входу другого елемента АБО й до третього входу третього елемента АБО, вихід першого блока затримки з'єднаний з першим виходом пристрою й із другим входом другого RS-тригера, перший вхід якого з'єднаний з першим входом пристрою, вихід другого блока затримки з'єднаний із другими входами першого RS-тригера й лічильника, вихід другого елемента АБО підключений до другого входу інтегратора, вихід першого порогового елемента підключений до другого входу третього елемента АБО й до керуючого входу другого ключа, джерело опорної напруги підключено до другого входу першого суматора, вихід цифро-аналогового перетворювача з'єднаний із входом другого порогового елемента, вихід якого з'єднаний із другим виходом пристрою, другий вхід другого суматора підключений до другого виходу другого ключа, вихід першого елемента АБО з'єднаний із входом першого блока затримки, а вихід підсилювача потужності з'єднаний із входом привода губок захвата, який відрізняється тим, що до складу пристрою введені послідовно з'єднані другий датчик проковзування, встановлений в одній із губок захвата з визначеною орієнтацією на можливість ідентифікації проковзування деталі у напрямку, перпендикулярному до напрямку визначеної ідентифікації проковзування деталі першим датчиком проковзування, та другий підсилювач, четвертий елемент АБО, третій елемент затримки, третій RS-тригер, а також третій та четвертий ключі, причому виходи першого та другого підсилювачів підключено відповідно до першого і другого входів четвертого елемента АБО, вихід якого з'єднано з сигнальним входом третього ключа, перший вихід якого підключено до першого входу лічильника, а другий - до першого входу третього RS-тригера, другий вхід якого з'єднано з другим входом пристрою, а вихід - з керуючим входом четвертого ключа та з входом третього елемента затримки, вихід якого водночас є четвертим виходом пристрою, вихід четвертого ключа підключено до третього виходу пристрою, а сигнальний вхід четвертого ключа - до виходу другого елемента затримки та до керуючого входу третього ключа, причому перший і другий входи та перший, другий, третій і четвертий виходи пристрою підключено до двох відповідних виходів та чотирьох відповідних входів комп'ютерної інформаційно-керуючої системи.
Текст
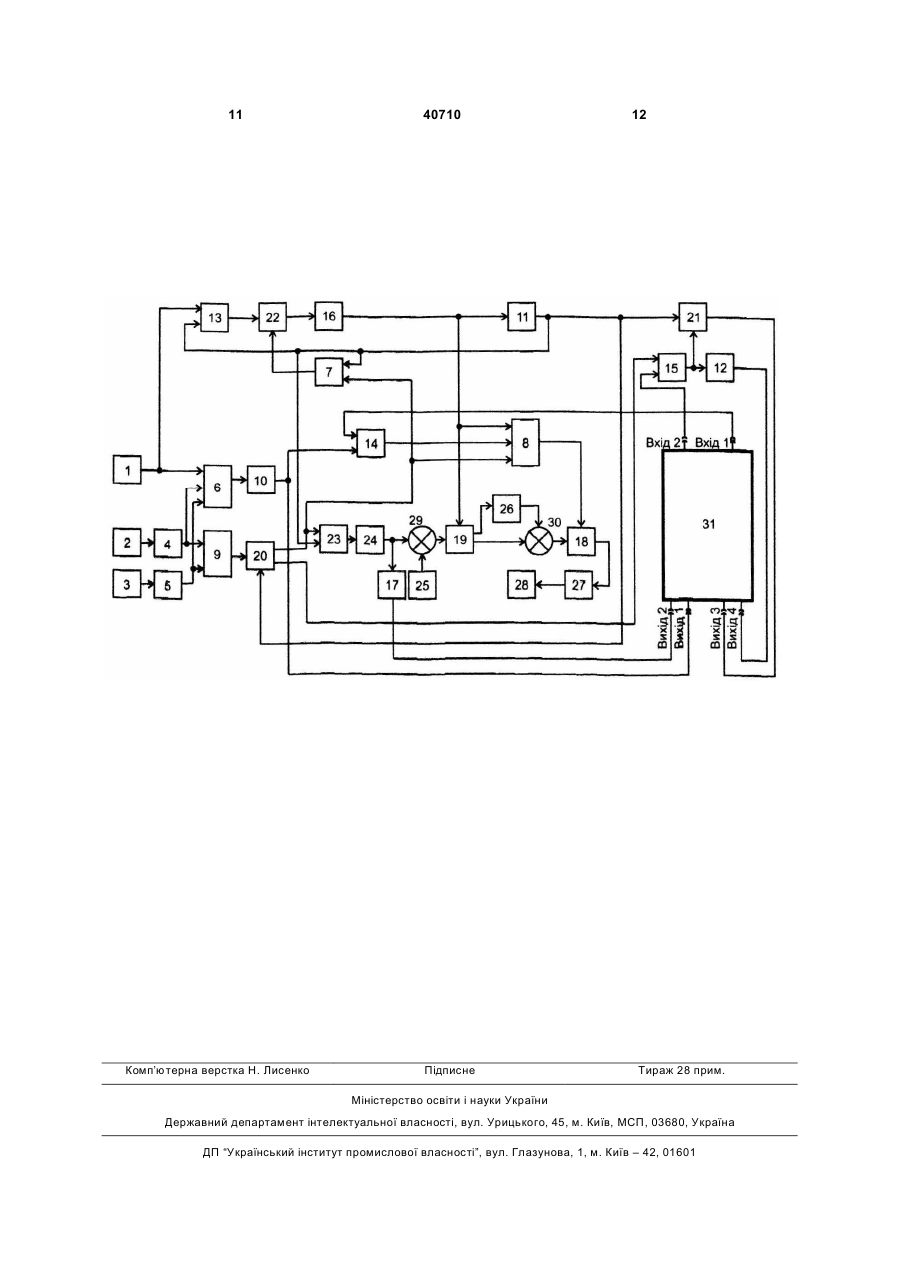
Пристрій ідентифікації та аналізу тактильних сигналів для комп'ютерної інформаційно-керуючої системи адаптивного робота з одним входом та трьома виходами, що має у своєму складі послідовно з'єднані перший датчик проковзування деталі й перший підсилювач, тактильний датчик, встановлений на одній з губок захвата робота, перший блок затримки, привід губок захвата, перший елемент АБО, послідовно з'єднані перший RS-тригер, інтегратор, перший пороговий елемент, другий блок затримки й другий елемент АБО, послідовно з'єднані лічильник, цифро-аналоговий перетворювач, перший суматор, другий ключ, дільник напруги, другий суматор, перший ключ і перший підсилювач потужності, а також другий пороговий елемент, джерело опорної напруги й послідовно з'єднані другий RS-тригер і третій елемент АБО, вихід якого з'єднаний з керуючим входом першого ключа, при цьому вихід тактильного датчика підключений до перших входів першого елемента АБО й першого RS-тригера, вихід першого підсилювача підключено до другого входу першого елемента АБО, перший вхід лічильника підключений до другого входу другого елемента АБО й до третього входу третього елемента АБО, вихід першого блока затримки з'єднаний з першим виходом пристрою й із другим входом другого RSтригера, перший вхід якого з'єднаний з першим входом пристрою, вихід другого блока затримки з'єднаний із другими входами першого RS-тригера 2 (19) 1 3 Корисна модель належить до робототехніки й може бути використана в конструкціях комп’ютеризованих адаптивних роботів, що пристосовуються до ваги деталей, які захоплюють. Відомо про пристрої ідентифікації та аналізу тактильних сигналів для комп’ютерних інформаційно-керуючих систем адаптивних роботів, що безпосередньо контактують з об’єктом маніпулювання (деталлю). Такі пристрої на основі аналізу тактильних сигналів від датчиків, що виникають внаслідок проковзування деталі в захватному пристрої робота, дозволяють автоматизувати процеси керування адаптивним роботом при виконанні різних технологічних операцій (автоматичного створення необхідного і достатнього стискального зусилля захватним пристроєм робота при захоплюванні деталі, автоматичне реагування на наявність перешкоди на шляху траєкторії переміщення деталі та/або зміну ваги деталі тощо). Прикладом є пристрій [а.с. СРСР №888067, В25J13/00, 1981], що містить у своєму складі тактильний датчик, опорний частотний генератор, послідовно з’єднані блок затримки й блок порівняння, другий вхід якого підключено до входу посилювача та блока затримки, а вихід - до другого входу блока управління, третім входом з’єднаного з опорним частотним генератором, а другим і третім виходами - з першим і другим входами датчика проковзування деталі відповідно. Такий пристрій має наступні недоліки: - низька надійність утримання деталі під час реалізації динамічних режимів маніпулювання (через створення стискального зусилля, що відповідає масі деталі у статичному режимі); - низька надійність спрацьовування пристрою при реалізації захоплювання деталі в зоні дії значних феромагнітних мас. Найбільш близьким до запропонованого є пристрій ідентифікації та аналізу тактильних сигналів для комп’ютерних інформаційно-керуючих систем адаптивних роботів [а.с. СРСР №1395436, В25J13/00, 1988], що прийнятий як прототип. Пристрій містить тактильний датчик, датчик проковзування, підсилювач, три елементи АБО, два блоки затримки, два RS-тригери, два порогових елементи, два ключі, інтегратор, лічильник, цифроаналоговий перетворювач, джерело опорної напруги, дільник напруги, підсилювач потужності, привод губок захвату, а також два суматори. Робота пристрою основана на реєстрації сигналів проковзування, що надходять із датчика проковзування під час пробних рухів у випадку, коли стискального зусилля захватного пристрою недостатньо для утримання деталі. Такий пристрій має наступні недоліки: - пристрій після реалізації процесу захоплювання деталі захватом робота в подальшому не реагує на нові сигнали датчика проковзування, що призводить до звуження сфери застосування пристрою через неможливість реагування роботом на подальше переміщення деталі відносно захвата робота при виконанні ним технологічної операції (наприклад, внаслідок зіткнення деталі з наявною перешкодою на траєкторії руху захватного при 40710 4 строю робота при переміщенні деталі за заданою траєкторією); - при використанні датчика проковзування, який реєструє проковзування деталі лише по одній координаті (тобто в напрямку дії сили тяжіння) для забезпечення гарантованої реєстрації проковзування деталі пристрій потребує відповідної попередньої орієнтації захвата робота; В основу корисної моделі поставлено задачу удосконалення пристрою ідентифікації та аналізу тактильних сигналів для комп’ютерних інформаційно-керуючих систем адаптивних роботів шляхом зміни схемотехнічного виконання пристрою та введення додаткових електронних блоків, що дозволить позбутись необхідності відповідної попередньої орієнтації захвата робота при використанні датчиків з реєстрацією проковзування лише в одному напрямі, та дасть можливість комп’ютерній інформаційно-керуючій системі адаптивного робота реагувати на проковзування деталі в захваті робота під час виконання ним технологічних операцій (наприклад, при зіткненні деталі з перешкодою під час виконання роботом операції транспортування деталі). Поставлена задача вирішується тим, що пристрій ідентифікації та аналізу тактильних сигналів для комп’ютерної інформаційно-керуючої системи адаптивного робота з одним входом та трьома виходами, що має у своєму складі послідовно з’єднані перший датчик проковзування деталі й перший підсилювач, тактильний датчик, встановлений на одній з губок захвата робота, перший блок затримки, привід губок захвата, перший елемент АБО, послідовно з’єднані перший RS-тригер, інтегратор, перший пороговий елемент, другий блок затримки й другий елемент АБО, послідовно з’єднані лічильник, цифро-аналоговий перетворювач, перший суматор, другий ключ, дільник напруги, другий суматор, перший ключ і перший підсилювач потужності, а також другий пороговий елемент, джерело опорної напруги й послідовно з’єднані другий RS-тригер і третій елемент АБО, вихід якого з’єднаний з керуючим входом першого ключа, при цьому вихід тактильного датчика підключений до перших входів першого елемента АБО й першого RS-тригера, вихід першого підсилювача підключено до другого входу першого елемента АБО, перший вхід лічильника підключений до другого входу другого елемента АБО й до третього входу третього елемента АБО, вихід першого блока затримки з’єднаний з першим виходом пристрою й із другим входом другого RSтригера, перший вхід якого з’єднаний з першим входом пристрою, вихід другого блока затримки з’єднаний із другими входами першого RS-тригера й лічильника, вихід другого елемента АБО підключений до другого входу інтегратора, вихід першого порогового елемента підключений до другого входу третього елемента АБО й до керуючого входу другого ключа, джерело опорної напруги підключено до другого входу першого суматора, вихід цифро-аналогового перетворювача з’єднаний із входом другого порогового елемента, вихід якого з’єднаний із другим виходом пристрою, другий вхід 5 другого суматора підключений до другого виходу другого ключа, вихід першого елемента АБО з’єднаний із входом першого блока затримки, а вихід підсилювача потужності з’єднаний із входом привода губок захвата, згідно пропозицією до складу пристрою введені послідовно з’єднані другий датчик проковзування, встановлений в одній із губок захвата з визначеною орієнтацією на можливість ідентифікації проковзування деталі у напрямку, перпендикулярному до визначеного напрямку ідентифікації проковзування деталі першим датчиком проковзування, та другий підсилювач, четвертий елемент АБО, третій елемент затримки, третій RS-тригер, а також третій та четвертий ключі, причому виходи першого та другого підсилювачів підключено відповідно до першого і другого входів четвертого елемента АБО, вихід якого з’єднано з сигнальним входом третього ключа, перший вихід якого підключено до першого входу лічильника, а другий - до першого входу третього RS-тригера, другий вхід якого з’єднано з другим входом пристрою, а вихід - з керуючим входом четвертого ключа та з входом третього елемента затримки, вихід якого водночас є четвертим виходом пристрою, вихід четвертого ключа підключено до третього виходу пристрою, а сигнальний вхід четвертого ключа - до виходу другого елемента затримки та до керуючого входу третього ключа, причому перший і другий входи та перший, другий, третій і четвертий виходи пристрою підключено до двох відповідних виходів та чотирьох відповідних входів комп’ютерної інформаційно-керуючої системи. Введення додаткового датчика проковзування дозволяє реєструвати проковзування деталі при будь-якій орієнтації захватного пристрою робота. Введення додаткових електронних блоків дає можливість визначення наявності проковзування деталі в захватному пристрої робота під час виконання технологічної операції, зокрема при виникненні проковзування деталі, при її зіткненні з невідомою перешкодою, і передачі відповідного сигналу аварії комп’ютерній інформаційнокеруючій системі робота. На рисунку представлено схему пристрою ідентифікації та аналізу тактильних сигналів для комп’ютерної інформаційно-керуючої системи адаптивного робота. Пристрій містить тактильний датчик 1, перший 2 та другий 3 датчики проковзування, перший 4 та другий 5 підсилювачі, перший 6, другий 7, третій 8 та четвертий 9 елементи АБО, перший 10, другий 11 і третій 12 блоки затримки, перший 13, другий 14 та третій 15 RS-тригери, перший 16 і другий 17 порогові елементи, перший 18, другий 19, третій 20 та четвертий 21 ключі, інтегратор 22, лічильник 23, цифро-аналоговий перетворювач 24, джерело 25 опорної напруги, дільник напруги 26, підсилювач потужності 27, привод 28 губок захвата, а також перший 29 і другий 30 суматори. Вихід тактильного датчика 1 підключений до перших входів першого елемента АБО 6 і першого RS-тригера 13, вихід якого з’єднаний з першим входом інтегратора 22. Вихід першого датчика проковзування 2 через перший підсилювач 4 підключено до другого входу першого елемента АБО 6 та першого входу четвертого 40710 6 елемента АБО 9, вихід якого підключено до сигнального входу третього ключа 20. Вихід другого датчика проковзування 3 через другий підсилювач 5 підключено до третього входу першого елемента АБО 6 та другого входу четвертого елемента АБО 9. Другий сигнальний вихід третього ключа 20 підключено до першого входу третього RS-тригера 15, а перший - з’єднано з другим входом другого елемента АБО 7, третім входом третього елемента АБО 8 і першим входом лічильника 23, вихід якого через цифро-аналоговий перетворювач 24 з’єднаний з першим входом першого суматора 29, підключеного другим входом до джерела 25 опорної напруги. Вихід першого елемента АБО 6 через перший блок затримки 10 з’єднаний з першим виходом пристрою, який підключений до відповідного входу комп’ютерної інформаційно-керуючої системи 31, й з другим входом другого RS-тригера 14, перший вхід якого підключений до першого входу пристрою, а вихід - до першого входу третього елемента АБО 8. Другий вихід пристрою, що підключений до відповідного входу комп’ютерної інформаційно-керуючої системи 31, через другий пороговий елемент 17 з’єднаний з виходом цифроаналогового перетворювача 24. Перший вхід пристрою з’єднано з відповідним виходом комп’ютерної інформаційно-керуючої системи 31, а вихід інтегратора 22, другий вхід якого підключений до виходу другого елемента АБО 7, з’єднаний через перший пороговий елемент 16 із входом другого блока затримки 11, другим входом третього елемента АБО 8 і керуючим входом другого ключа 19. Третій вихід пристрою, що підключений до відповідного входу комп’ютерної інформаційнокеруючої системи 31, з’єднаний з сигнальним виходом четвертого ключа 21, сигнальний вхід якого з’єднано з виходом другого блока затримки 11. Водночас, вихід другого блока затримки 11 підключено до другого входу першого RS-тригера 13, першого входу другого елемента АБО 7, та керуючого входу третього ключа 20. Другий сигнальний вихід другого ключа 19, підключеного сигнальним входом до виходу першого суматора 29, і другий вхід другого суматора 30 з’єднані безпосередньо, а перший вихід ключа 19 і перший вхід суматора 30 - через дільник напруги 26. Вихід другого суматора 30 через послідовно з’єднані перший ключ 18, керуючий вхід якого з’єднаний з виходом третього елемента АБО 8, і підсилювач потужності 27 підключений до привода 28 стискання губок. Другий вхід пристрою підключено до відповідного виходу комп’ютерної інформаційно-керуючої системи 31 адаптивного робота та до другого входу третього RS-тригера 15, вихід якого з’єднано з керуючим входом четвертого ключа 21 та входом третього блока затримки 12, вихід якого є четвертим виходом пристрою і підключений до відповідного входу комп’ютеризованої системи керування 31. В якості тактильного датчика 1 може бути використаний датчик, що встановлюється на губці захватного пристрою робота й на виході якого формується однозначний дискретний сигнал, що відповідає наявності (наприклад, логічна 1) або відсутності (наприклад, логічний 0) контакту деталі з губкою захватного пристрою робота. В якості дат 7 чиків проковзування 2, 3 можуть бути використані датчики проковзування, що реєструють наявність проковзування деталі в захватному пристрої робота й формують на виході датчика однозначний дискретний сигнал, що відповідає наявності (наприклад, логічна 1) або відсутності (наприклад, логічний 0) проковзування [наприклад, датчики відповідно Патенту України на корисну модель №27722, 2007]. Конструкція пристрою також передбачає використання датчиків проковзування 2, які реєструють наявність проковзування деталі в захваті робота лише в одному напрямі (по одній координаті), що співпадає з напрямом дії сили тяжіння [наприклад, датчики відповідно Патенту України на винахід №79155, 2007]. В такому випадку другий з таких датчиків 3 проковзування встановлюється на губці захватного пристрою з визначеною орієнтацією на можливість ідентифікації проковзування деталі у напрямку, перпендикулярному до напрямку визначеної ідентифікації проковзування деталі першим датчиком проковзування. Комп’ютерна інформаційно-керуюча система 31 може бути реалізована на програмно-апаратному рівні за допомогою мікроконтролерів (наприклад, фірм Motorola, Microchip, Toshiba та ін.) або на базі ЕОМ. Запропонований пристрій працює таким чином. У початковому стані (перед захоплюванням деталі) губки захватного пристрою розведені, на виходах тактильного датчика 1 й першого 2 та другого 3 датчиків проковзування встановлені сигнали нульового рівня, перший 13, другий 14 та третій 15 RS-тригери й лічильник 16 перебувають у нульовому стані, а сигнальний вхід четвертого ключа 21 з’єднано з його сигнальним виходом. Водночас, сигнальний вхід третього ключа 20 з’єднано з його першим сигнальним виходом. Відповідно, на виході цифро-аналогового перетворювача 24 напруга дорівнює нулю. При цьому напруга на виході першого суматора 29 відповідає напрузі UОП, встановленій на виході джерела опорної напруги 25. Сигнальний вхід першого ключа 18 відключений від його виходу, а сигнальний вхід другого ключа 19 з’єднаний з його першим сигнальним виходом, підключеним до входу дільника напруги 26 з коефіцієнтом ділення К. Оскільки вихід дільника напруги 26 з’єднаний з першим входом другого суматора 30, то на виході останнього встановлюється сигнал, що відповідає напрузі U0=UOП/K. На перший вхід пристрою з комп’ютерної інформаційнокеруючої системи подається імпульс, що сигналізує про необхідність виконання й початок операції захоплювання. Цей імпульс надходить на перший вхід другого RS-тригера 14 і переводить його в робочий стан (що відповідає рівню логічної одиниці). Сигнал логічної одиниці надходить на перший вхід третього елемента АБО 8, на виході якого також встановлюється сигнал логічної одиниці, що подається на керуючий вхід першого ключа 18 і викликає його спрацьовування та відповідно призводить до проходження сигналу з виходу другого суматора 30 на вхід підсилювача потужності 27, а з останнього - на привод губок захватного пристрою 28. Сигнал Uo відповідає створенню приво 40710 8 дом 28 губок захватного пристрою мінімального (початкового) стискального зусилля. Губки під дією привода 28 починають стискатися. У момент торкання деталі губками захватного пристрою спрацьовує тактильний датчик 1, імпульс із виходу якого надходить на перший вхід першого RS-тригера 13 і на перший вхід першого елемента АБО 6. Цей імпульс викликає установку першого RS-тригера 13 в одиничний стан, тобто призводить до появи на його виході сигналу, що відповідає рівню логічної одиниці, який, надходячи на перший вхід інтегратора 22, викликає появу на виході останнього лінійно наростаючої напруги. При цьому також формується сигнал на виході першого елемента АБО 6, що через перший блок затримки 7 надходить на перший вихід пристрою, подаючи сигнал комп’ютерній інформаційно-керуючій системі адаптивного робота на виконання спробного руху, а також на другий вхід другого RS-тригера 14 і скидає його в нульовий стан. Нульовий сигнал на виході останнього викликає появу логічного нуля на виході третього елемента АБО 8 й, відповідно, логічного нуля на вході керування першого ключа 18, що призводить до його розмикання. Підсилювач потужності 27 відключається від виходу другого суматора 30. Робот виконує спробний рух, тобто піднімає захват із затиснутою деталлю й, якщо стискального зусилля недостатньо для утримання деталі, то вона починає прослизати між губками захватного пристрою, що, в залежності від напряму проковзування, викликає спрацьовування першого 2 або другого 3 датчиків проковзування, сигнали з яких, будучи посиленими відповідно першим 4 та другим 5 підсилювачами, подаються на відповідно другий та третій входи першого елемента АБО 6, та (через третій ключ 20) на перший вхід лічильника 23, на третій вхід третього елемента АБО 8 і на другий вхід другого елемента АБО 7. На виході останнього також з’являється сигнал, що відповідає логічній одиниці й подається на другий вхід інтегратора 22, внаслідок чого напруга на виході інтегратора 22 скидається до нуля. Сигнал, що надійшов на перший вхід лічильника 23, викликає збільшення у двійковому коді на одиницю значення на його виході й, відповідно, і збільшення напруги на величину AU на виході цифроаналогового перетворювача 24, що надходить на перший вхід першого суматора 29. Вихідний сигнал U01=UOП+DU першого суматора 29 надходить через другий ключ 19 і дільник 26 на перший вхід другого суматора 30, на виході якого встановлюється сигнал U1 = U01/K. Сигнал на третьому вході третього елемента АБО 8 викликає появу логічної одиниці на виході останнього, й спрацьовування першого ключа 13, через який напруга U1, що відповідає наступному рівню стискального зусилля, надходить на підсилювач потужності 27, а з нього на привід 28, що відпрацьовує нове значення стискального зусилля. Сигнал на другому або третьому вході першого елемента АБО 6 викликає появу сигналу на виході останнього. Цей сигнал, будучи затриманий першим блоком затримки 7, що необхідно для того, щоб привод 28 встиг відпрацювати нове стискальне зусилля, надходить на перший вихід пристрою і є командою комп’ютерній 9 інформаційно-керуючій системі адаптивного робота на виконання нового спробного руху. Зазначена послідовність операцій буде тривати доти, поки стискальне зусилля не стане достатнім для надійної фіксації деталі в губках захвата адаптивного робота. У цьому випадку при спробному русі сигнали на виходах першого 2 й другого 3 датчиків проковзування, а також скидальний імпульс на другому вході інтегратора 22 будуть відсутні, отже, напруга на виході останнього буде зростати до рівня спрацьовування першого порогового елемента 16, який при цьому подає імпульс на другий блок затримки 11, на другий вхід третього елемента АБО 8 і на керуючий вхід другого ключа 19. При цьому сигнальний вхід другого ключа 19 відключається від його першого сигнального виходу й підключається до його другого сигнального виходу. Це призводить до того, що вихідний сигнал U0i=UОП+іDU (де і - номер кроку стискального зусилля) першого суматора 29 надходить на другий вхід другого суматора 30, минаючи дільник 26, тобто буде в К разів більше попереднього сигналу Ui. Одночасно сигнал на другому вході третього елемента АБО 8 викликає сигнал на виході останнього, спрацювання першого ключа 18 й, відповідно, подачу збільшеної в К разів напруги U0i на підсилювач потужності 27 і далі - на привід 28, що відповідно збільшує стискальне зусилля захвата, причому останнє збільшення зусилля необхідне для виключення випадання деталі внаслідок прискорень, що виникають при подальшому маніпулюванні. Сигнал, що надійшов на вхід другого блока затримки 11 і затриманий останнім на час, необхідний для відпрацьовування кінцевого збільшення величини стискального зусилля, надходить через четвертий ключ 21 на третій вихід пристрою (сигнал комп’ютерній інформаційнокеруючій системі адаптивного робота про можливість виконання роботом наступної операції), а також на другий вхід першого тригера 13, перший вхід другого елемента АБО 7, на другий вхід лічильника 23 та на вхід керування третього ключа 20, причому вказаний сигнал скидає перший RSтригер 13 у нульовий стан й, пройшовши через другий елемент АБО 7 і надійшовши на другий вхід інтегратора 22, скидає його та лічильник 16 в нульовий стан й переключає сигнальний вхід третього ключа 20 з першого сигнального виходу на другий. Таким чином, частина пристрою що відповідає за процес захоплювання деталі виявляється у вихідному стані (окрім стану третього ключа 20). Якщо на передостанньому (r-1)-му пробному кроці, кількість r яких визначається розрядністю лічильника 23, надійної фіксації деталі в губках захватного пристрою не відбудеться, то вихідна напруга 40710 10 DUr=rDU цифро-аналогового перетворювача 24 приводить до спрацьовування другого порогового елемента 17, а отже, на другий вихід пристрою буде поданий сигнал, що інформує комп’ютерну інформаційно-керуючу систему про неможливість здійснення захвату деталі через невідповідність її маси технічним характеристикам адаптивного робота. Якщо ж захоплювання деталі відбулося успішно, то робот розпочинає виконання необхідних транспортних операцій. У випадку, якщо на шляху транспортування деталі з’явиться перешкода, що призведе до її зміщення (руху) при контакті з перешкодою відносно захватного пристрою, то, незалежно від напрямку орієнтації захватного пристрою робота, завдяки використанню двох датчиків проковзування що реєструють проковзування деталі в одній площині у двох взаємно перпендикулярних напрямах, на виході першого 2 або другого 3 датчиків проковзування з’явиться сигнал, що проходячи через четвертий елемент АБО 9 та третій ключ 20 встановить третій RS-тригер 15 в робочий стан (що відповідає рівню логічної одиниці). Сигнал логічної одиниці на виході третього RSтригера 15, надходячи на вхід керування четвертим ключем 21, призводить до його розмикання, на третьому виході пристрою встановлюється нульовий сигнал, що робить неможливим отримання комп’ютерною інформаційно-керуючою системою сигналу про подальше виконання роботом запланованої транспортної операції з деталлю. Водночас, сигнал логічної одиниці на виході третього RS-тригера 15 будучи затриманим третім блоком затримки 12, надходить на четвертий вихід пристрою, сигналізуючи комп’ютерній інформаційнокеруючий системі про аварійну ситуацію, пов’язану із зіткненням деталі з перешкодою. У разі виникнення аварійної ситуації комп’ютерна інформаційно-керуюча система посилає на другий вхід пристрою сигнал, що відповідає логічній одиниці і переводить пристрій в початковий стан. Позитивний ефект проявляється в тому, що в порівнянні з пристроєм по [а.с СРСР №1395436] до складу пристрою введено додатковий датчик проковзування, що дозволяє пристрою реєструвати проковзування деталі в захваті адаптивного робота в будь-якому напрямку і при будь-якій орієнтації захвата. Завдяки додатково введеним блокам забезпечується не лише коректна реалізація процесу захоплювання деталі захватним пристроєм робота, але й можливість контролювання пристроєм подальших транспортних операцій робота з деталлю з метою реєстрації наявності перешкоди на шляху транспортування деталі і подачі на вхід комп’ютерній інформаційно-керуючій системі відповідного сигналу. 11 Комп’ютерна верстка Н. Лисенко 40710 Підписне 12 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice of identification and analysis of tactile signals for information-control system of adaptive robot
Автори англійськоюKondratenko Yurii Panteliiovych, Zaporozhets Yurii Mykhailovych, Kondratenko Halyna Volodymyrivna, Shyshkin Oleksandr Serhiiovych
Назва патенту російськоюУстройство идентификации и анализа тактильных сигналов для информационно-управляющей системы адаптивного робота
Автори російськоюКондратенко Юрий Пантелеевич, Запорожец Юрий Михайлович, Кондратенко Галина Владимировна, Шишкин Александр Сергеевич
МПК / Мітки
МПК: B25J 19/02
Мітки: аналізу, тактильних, пристрій, адаптивного, системі, сигналів, інформаційно-керуючої, ідентифікації, робота
Код посилання
<a href="https://ua.patents.su/6-40710-pristrijj-identifikaci-ta-analizu-taktilnikh-signaliv-dlya-informacijjno-keruyucho-sistemi-adaptivnogo-robota.html" target="_blank" rel="follow" title="База патентів України">Пристрій ідентифікації та аналізу тактильних сигналів для інформаційно-керуючої системи адаптивного робота</a>
Датчик проковзування об’єкта маніпулювання адаптивного робота
Номер патенту: 36077
Опубліковано: 10.10.2008
Автори: Марковський Ігор Володимирович, Кондратенко Володимир Юрійович, Кондратенко Юрій Пантелійович, Чернов Сергій Костянтинович, Кондратенко Галина Володимирівна
МПК: B25J 19/02
Мітки: об'єкта, робота, проковзування, датчик, маніпулювання, адаптивного
Формула / Реферат:
Датчик проковзування об'єкта маніпулювання адаптивного робота, що містить корпус, в якому розміщено магнітну систему, до складу якої входить циліндричний ролик, виконаний у вигляді принаймні одного замкнутого тороїдального намагніченого магнітопроводу з нанесеним на твірну поверхню ролика захисним пружним покриттям і з можливістю обертання ролика навколо своєї осі, та закріплений на корпусі магніточутливий елемент, до складу якого входять...
Багатофункціональний кистьовий пристрій адаптивного робота
Номер патенту: 24270
Опубліковано: 25.06.2007
Автори: Кондратенко Юрій Пантелійович, Чернов Сергій Костянтинович, Марковський Ігор Володимирович, Швець Едуард Анатолійович, Кондратенко Володимир Юрійович
МПК: B25J 15/00
Мітки: кистьовий, пристрій, багатофункціональний, робота, адаптивного
Формула / Реферат:
Багатофункціональний кистьовий пристрій адаптивного робота, що містить дві пари захватних органів, основу, перший компонент головного корпусу, додатковий корпус, в якому закріплено привід захватних органів, кінематично зв'язаний з гвинтовою парою, зовнішній і внутрішній порожнинні циліндричні елементи, встановлені коаксіально гвинту гвинтової пари, та закріплений на основі перший керований фіксатор, виконаний у вигляді електромагніта, рухомий...
Пристрій для аналізу комутації колекторних електричних машин постійного струму

Номер патенту: 14408
Опубліковано: 15.05.2006
Автори: Жуков Сергій Олександрович, Мокін Борис Іванович
МПК: H02K 13/14
Мітки: пристрій, струму, комутації, машин, постійного, електричних, аналізу, колекторних
Формула / Реферат:
Пристрій для аналізу комутації колекторних електричних машин постійного струму, який складається із сенсора-щітки падіння напруги, сенсора синхронізації по обертах, формувача імпульсів, лічильника, електронного ключа, блока індикації, причому вихід сенсора-щітки падіння напруги з'єднаний з входом формувача імпульсів, який відрізняється тим, що в нього введено сенсор струму, перший, другий, третій і четвертий логічні елементи І, логічний...
Датчик проковзування адаптивного робота
Номер патенту: 15635
Опубліковано: 17.07.2006
Автори: Кондратенко Юрій Пантелійович, Кондратенко Володимир Юрійович, Крутських Сергій Владиславович
МПК: B25J 19/02
Мітки: датчик, робота, адаптивного, проковзування
Формула / Реферат:
Датчик проковзування адаптивного робота, що містить корпус, в якому встановлено чутливий елемент, виконаний у вигляді циліндричного ролика з можливістю повороту навколо своєї осі, робоча поверхня якого виконана з еластичного матеріалу, і систему реєстрації сигналу проковзування, який відрізняється тим, що система реєстрації сигналу проковзування виконана у вигляді двосекційного конденсатора, дві нерухомі обкладки якого через діелектрик...
Спосіб ідентифікації сигналів в системах цифрового спектрального аналізу

Номер патенту: 80916
Опубліковано: 12.11.2007
Автор: Селетков Віктор Леонідович
МПК: G01R 23/16, G10L 11/00
Мітки: цифрового, спектрального, сигналів, спосіб, системах, аналізу, ідентифікації
Формула / Реферат:
Спосіб ідентифікації сигналів в системах цифрового спектрального аналізу, що включає низькочастотну фільтрацію на блоках стаціонарності, розділення блоків стаціонарності на сегменти аналізу, формування на кожному сегменті аналізу значення відліків сигналу, формування для кожного сегмента аналізу значення поточних амплітудних спектрів сигналу, формування для кожного блока стаціонарності значення спектральної кореляційної функції за...
Попередній патент: 4-(3-арил-акрилоїл)-3,5-диметил-1н-пірол-2-карбонові кислоти
Наступний патент: Тангенціальний фасонний призматичний різець
Випадковий патент: Автоматичний одоризатор газу