Спосіб вимірювання товщини стінки порожнистої лопатки
Номер патенту: 73948
Опубліковано: 17.10.2005
Автори: Лєспіне Олівьє, Паніззолі Франк Поль Домінік Віталь, Плако Домінік Марк Бруно, Муренко Ален, Лє Бійан Йанн, Сантандер-Рожа Едуардо-Агапіто
Формула / Реферат
1. Спосіб вимірювання товщини стінки порожнистої лопатки для закривання перегородок, в якому прикладають два полюси магнітного осердя детектора вихорових струмів до стінки паралельно перегородкам, причому полюси обладнані котушками, які з'єднані послідовно одна з одною, переміщують детектор по стінці перпендикулярно перегородкам, подають перший сигнал на котушки, реєструють технічні характеристики першого сигналу, що залежить від товщини стінки, і визначають товщину стінки відповідно до попередніх калібрувань, отриманих за допомогою детектора на ряду базових стінок, отримуючи різні значення товщин, та технічних характеристик першого сигналу, що залежить від товщини стінки.
2. Спосіб вимірювання за п. 1, який відрізняється тим, що кожна з ряду базових стінок закриває розділені різними інтервалами перегородки.
3. Спосіб вимірювання за п. 1, який відрізняється тим, що включає навчання мережі нейронів (N) за допомогою попередніх калібрувань, причому значення товщини стінки отримують шляхом обробляння першого сигналу, одержаного детектором, за допомогою мережі нейронів, на вхід якої його подають.
4. Спосіб вимірювання за п. 1, який відрізняється тим, що додатково включає прикладання двох полюсів магнітного осердя детектора вихорових струмів до стінки перпендикулярно перегородкам, переміщування цього детектора по стінці перпендикулярно перегородкам, реєстрацію другого сигналу, отриманого за допомогою цього детектора, визначення товщини стінки відповідно до попередніх калібрувань за значеннями як першого, так і другого сигналів.
5. Спосіб вимірювання за п. 1, який відрізняється тим, що включає оцінку кута між детектором і стінкою і корекцію величини товщини стінки з використанням оцінки кута.
Текст
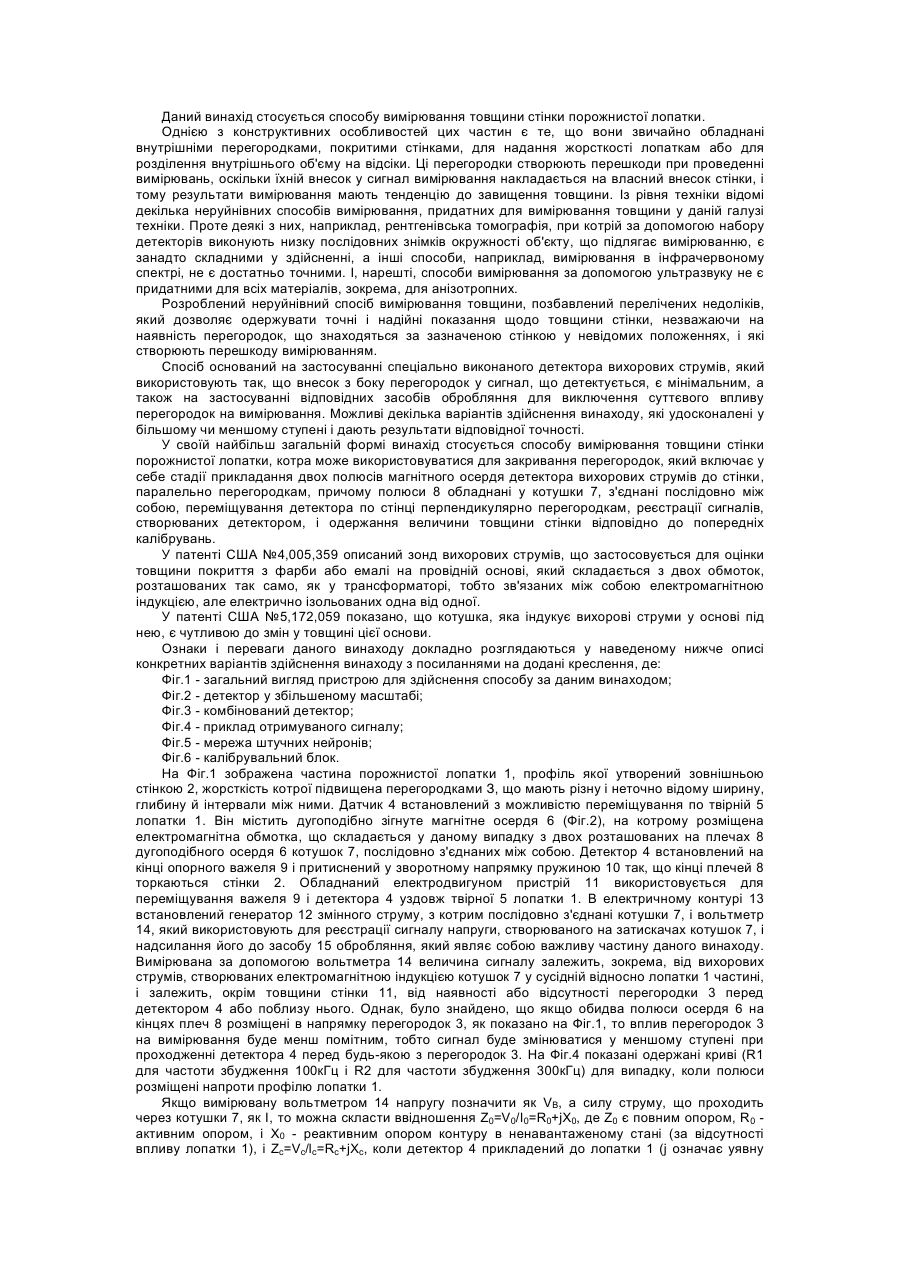
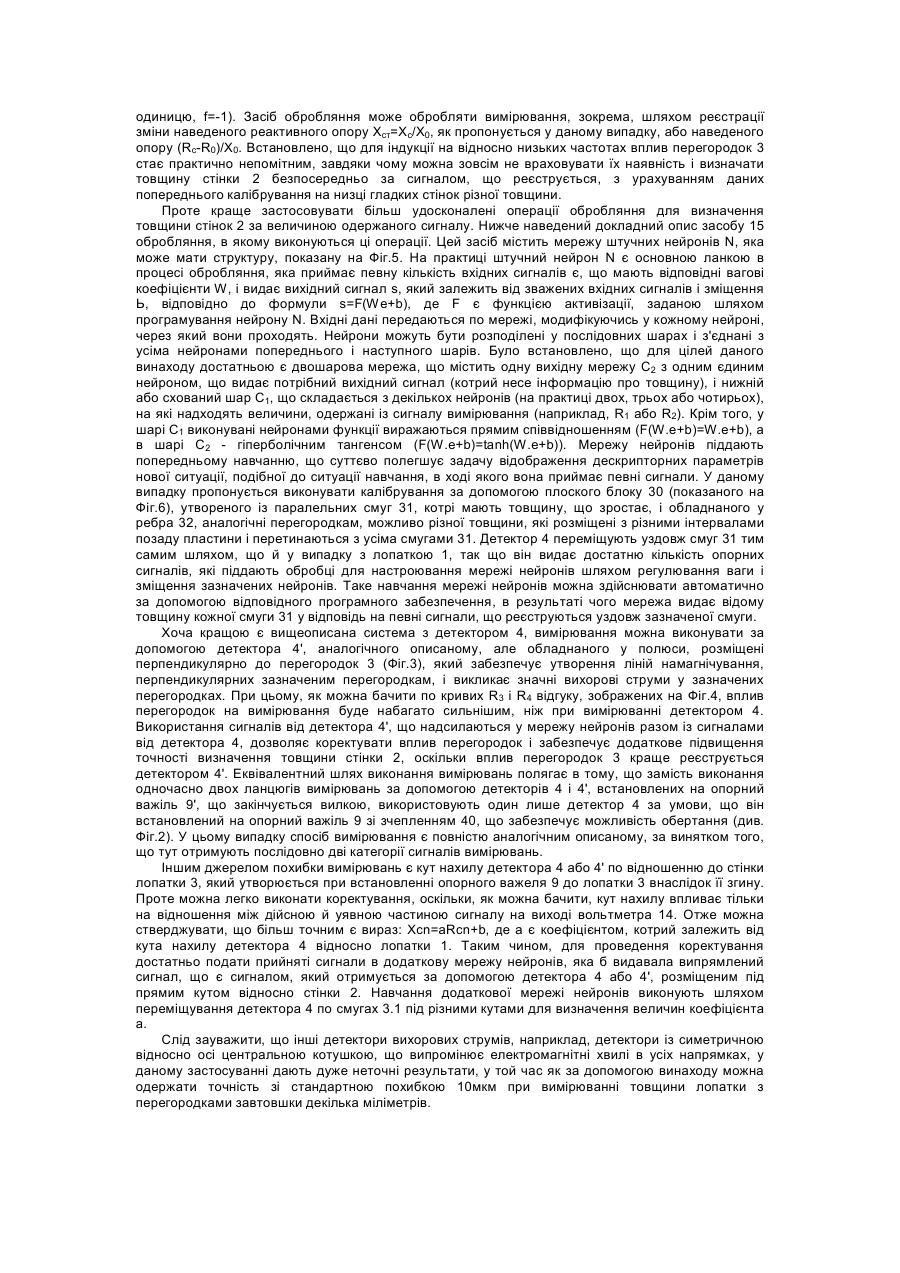
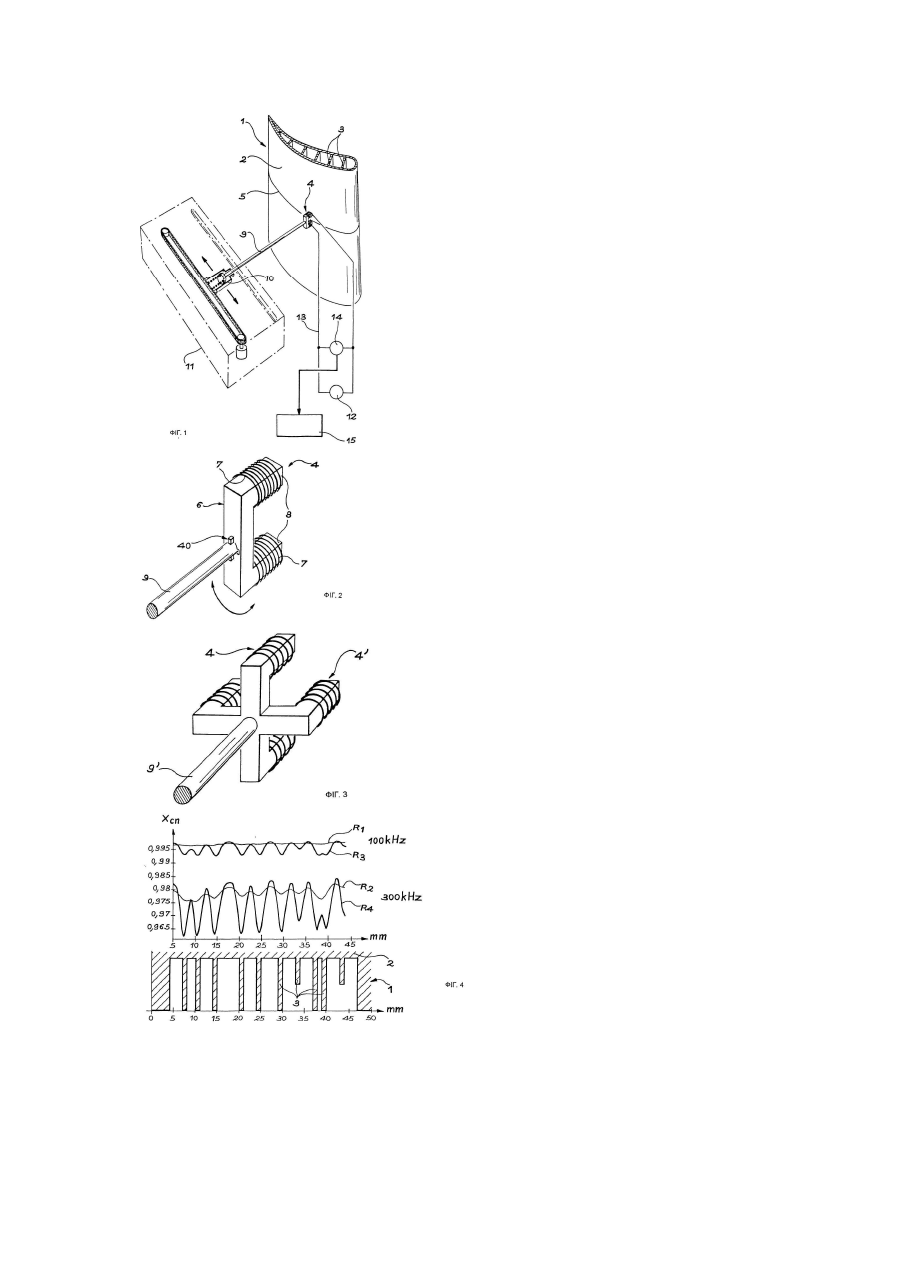
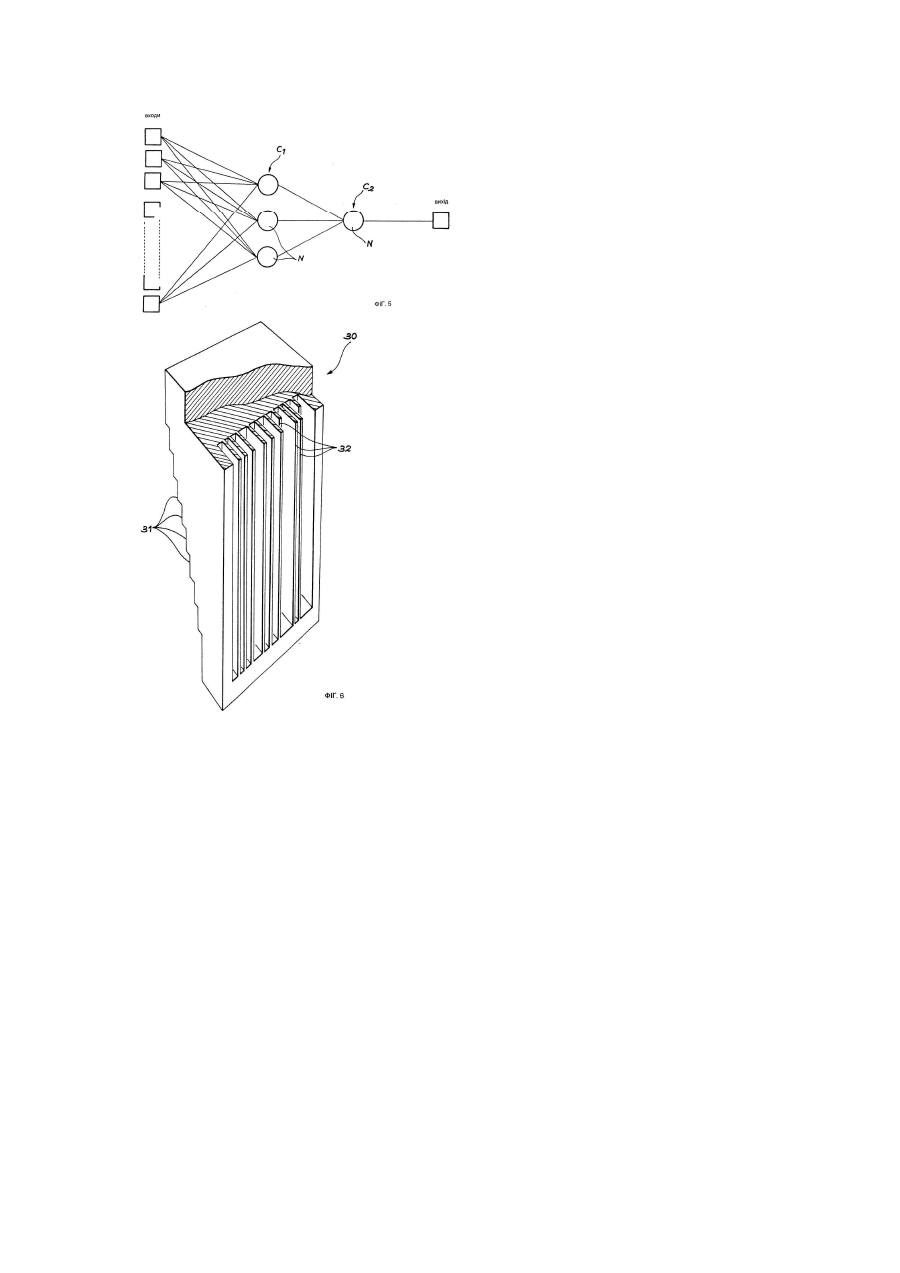
Даний винахід стосується способу вимірювання товщини стінки порожнистої лопатки. Однією з конструктивних особливостей цих частин є те, що вони звичайно обладнані внутрішніми перегородками, покритими стінками, для надання жорсткості лопаткам або для розділення внутрішнього об'єму на відсіки. Ці перегородки створюють перешкоди при проведенні вимірювань, оскільки їхній внесок у сигнал вимірювання накладається на власний внесок стінки, і тому результати вимірювання мають тенденцію до завищення товщини. Із рівня техніки відомі декілька неруйнівних способів вимірювання, придатних для вимірювання товщини у даній галузі техніки. Проте деякі з них, наприклад, рентгенівська томографія, при котрій за допомогою набору детекторів виконують низку послідовних знімків окружності об'єкту, що підлягає вимірюванню, є занадто складними у здійсненні, а інші способи, наприклад, вимірювання в інфрачервоному спектрі, не є достатньо точними. І, нарешті, способи вимірювання за допомогою ультразвуку не є придатними для всіх матеріалів, зокрема, для анізотропних. Розроблений неруйнівний спосіб вимірювання товщини, позбавлений перелічених недоліків, який дозволяє одержувати точні і надійні показання щодо товщини стінки, незважаючи на наявність перегородок, що знаходяться за зазначеною стінкою у невідомих положеннях, і які створюють перешкоду вимірюванням. Спосіб оснований на застосуванні спеціально виконаного детектора вихорових струмів, який використовують так, що внесок з боку перегородок у сигнал, що детектується, є мінімальним, а також на застосуванні відповідних засобів обробляння для виключення суттєвого впливу перегородок на вимірювання. Можливі декілька варіантів здійснення винаходу, які удосконалені у більшому чи меншому ступені і дають результати відповідної точності. У своїй найбільш загальній формі винахід стосується способу вимірювання товщини стінки порожнистої лопатки, котра може використовуватися для закривання перегородок, який включає у себе стадії прикладання двох полюсів магнітного осердя детектора вихорових струмів до стінки, паралельно перегородкам, причому полюси 8 обладнані у котушки 7, з'єднані послідовно між собою, переміщування детектора по стінці перпендикулярно перегородкам, реєстрації сигналів, створюваних детектором, і одержання величини товщини стінки відповідно до попередніх калібрувань. У патенті США №4,005,359 описаний зонд вихорових струмів, що застосовується для оцінки товщини покриття з фарби або емалі на провідній основі, який складається з двох обмоток, розташованих так само, як у трансформаторі, тобто зв'язаних між собою електромагнітною індукцією, але електрично ізольованих одна від одної. У патенті США №5,172,059 показано, що котушка, яка індукує вихорові струми у основі під нею, є чутливою до змін у товщині цієї основи. Ознаки і переваги даного винаходу докладно розглядаються у наведеному нижче описі конкретних варіантів здійснення винаходу з посиланнями на додані креслення, де: Фіг.1 - загальний вигляд пристрою для здійснення способу за даним винаходом; Фіг.2 - детектор у збільшеному масштабі; Фіг.3 - комбінований детектор; Фіг.4 - приклад отримуваного сигналу; Фіг.5 - мережа штучних нейронів; Фіг.6 - калібрувальний блок. На Фіг.1 зображена частина порожнистої лопатки 1, профіль якої утворений зовнішньою стінкою 2, жорсткість котрої підвищена перегородками З, що мають різну і неточно відому ширину, глибину й інтервали між ними. Датчик 4 встановлений з можливістю переміщування по твірній 5 лопатки 1. Він містить дугоподібно зігнуте магнітне осердя 6 (Фіг.2), на котрому розміщена електромагнітна обмотка, що складається у даному випадку з двох розташованих на плечах 8 дугоподібного осердя 6 котушок 7, послідовно з'єднаних між собою. Детектор 4 встановлений на кінці опорного важеля 9 і притиснений у зворотному напрямку пружиною 10 так, що кінці плечей 8 торкаються стінки 2. Обладнаний електродвигуном пристрій 11 використовується для переміщування важеля 9 і детектора 4 уздовж твірної 5 лопатки 1. В електричному контурі 13 встановлений генератор 12 змінного струму, з котрим послідовно з'єднані котушки 7, і вольтметр 14, який використовують для реєстрації сигналу напруги, створюваного на затискачах котушок 7, і надсилання його до засобу 15 обробляння, який являє собою важливу частину даного винаходу. Вимірювана за допомогою вольтметра 14 величина сигналу залежить, зокрема, від вихорових струмів, створюваних електромагнітною індукцією котушок 7 у сусідній відносно лопатки 1 частині, і залежить, окрім товщини стінки 11, від наявності або відсутності перегородки 3 перед детектором 4 або поблизу нього. Однак, було знайдено, що якщо обидва полюси осердя 6 на кінцях плеч 8 розміщені в напрямку перегородок 3, як показано на Фіг.1, то вплив перегородок 3 на вимірювання буде менш помітним, тобто сигнал буде змінюватися у меншому ступені при проходженні детектора 4 перед будь-якою з перегородок 3. На Фіг.4 показані одержані криві (R1 для частоти збудження 100кГц і R2 для частоти збудження 300кГц) для випадку, коли полюси розміщені напроти профілю лопатки 1. Якщо вимірювану вольтметром 14 напругу позначити як VB, а силу струму, що проходить через котушки 7, як І, то можна скласти ввідношення Z0=V0/I0=R0+jX0, де Z0 є повним опором, R0 активним опором, і Х0 - реактивним опором контуру в ненавантаженому стані (за відсутності впливу лопатки 1), і Zc=Vc/lc=Rс+jXc, коли детектор 4 прикладений до лопатки 1 (j означає уявну одиницю, f=-1). Засіб обробляння може обробляти вимірювання, зокрема, шляхом реєстрації зміни наведеного реактивного опору Хст=Хс/Х0, як пропонується у даному випадку, або наведеного опору (Rc-R0)/X0. Встановлено, що для індукції на відносно низьких частотах вплив перегородок 3 стає практично непомітним, завдяки чому можна зовсім не враховувати їх наявність і визначати товщину стінки 2 безпосередньо за сигналом, що реєструється, з урахуванням даних попереднього калібрування на низці гладких стінок різної товщини. Проте краще застосовувати більш удосконалені операції обробляння для визначення товщини стінок 2 за величиною одержаного сигналу. Нижче наведений докладний опис засобу 15 обробляння, в якому виконуються ці операції. Цей засіб містить мережу штучних нейронів N, яка може мати структуру, показану на Фіг.5. На практиці штучний нейрон N є основною ланкою в процесі обробляння, яка приймає певну кількість вхідних сигналів є, що мають відповідні вагові коефіцієнти W, і видає вихідний сигнал s, який залежить від зважених вхідних сигналів і зміщення Ь, відповідно до формули s=F(We+b), де F є функцією активізації, заданою шляхом програмування нейрону N. Вхідні дані передаються по мережі, модифікуючись у кожному нейроні, через який вони проходять. Нейрони можуть бути розподілені у послідовних шарах і з'єднані з усіма нейронами попереднього і наступного шарів. Було встановлено, що для цілей даного винаходу достатньою є двошарова мережа, що містить одну вихідну мережу С2 з одним єдиним нейроном, що видає потрібний вихідний сигнал (котрий несе інформацію про товщину), і нижній або схований шар С1, що складається з декількох нейронів (на практиці двох, трьох або чотирьох), на які надходять величини, одержані із сигналу вимірювання (наприклад, R1 або R2). Крім того, у шарі С1 виконувані нейронами функції виражаються прямим співвідношенням (F(W.e+b)=W.e+b), а в шарі С2 - гіперболічним тангенсом (F(W.e+b)=tanh(W.e+b)). Мережу нейронів піддають попередньому навчанню, що суттєво полегшує задачу відображення дескрипторних параметрів нової ситуації, подібної до ситуації навчання, в ході якого вона приймає певні сигнали. У даному випадку пропонується виконувати калібрування за допомогою плоского блоку 30 (показаного на Фіг.6), утвореного із паралельних смуг 31, котрі мають товщину, що зростає, і обладнаного у ребра 32, аналогічні перегородкам, можливо різної товщини, які розміщені з різними інтервалами позаду пластини і перетинаються з усіма смугами 31. Детектор 4 переміщують уздовж смуг 31 тим самим шляхом, що й у випадку з лопаткою 1, так що він видає достатню кількість опорних сигналів, які піддають обробці для настроювання мережі нейронів шляхом регулювання ваги і зміщення зазначених нейронів. Таке навчання мережі нейронів можна здійснювати автоматично за допомогою відповідного програмного забезпечення, в результаті чого мережа видає відому товщину кожної смуги 31 у відповідь на певні сигнали, що реєструються уздовж зазначеної смуги. Хоча кращою є вищеописана система з детектором 4, вимірювання можна виконувати за допомогою детектора 4', аналогічного описаному, але обладнаного у полюси, розміщені перпендикулярно до перегородок 3 (Фіг.3), який забезпечує утворення ліній намагнічування, перпендикулярних зазначеним перегородкам, і викликає значні вихорові струми у зазначених перегородках. При цьому, як можна бачити по кривих R3 і R4 відгуку, зображених на Фіг.4, вплив перегородок на вимірювання буде набагато сильнішим, ніж при вимірюванні детектором 4. Використання сигналів від детектора 4', що надсилаються у мережу нейронів разом із сигналами від детектора 4, дозволяє коректувати вплив перегородок і забезпечує додаткове підвищення точності визначення товщини стінки 2, оскільки вплив перегородок 3 краще реєструється детектором 4'. Еквівалентний шлях виконання вимірювань полягає в тому, що замість виконання одночасно двох ланцюгів вимірювань за допомогою детекторів 4 і 4', встановлених на опорний важіль 9', що закінчується вилкою, використовують один лише детектор 4 за умови, що він встановлений на опорний важіль 9 зі зчепленням 40, що забезпечує можливість обертання (див. Фіг.2). У цьому випадку спосіб вимірювання є повністю аналогічним описаному, за винятком того, що тут отримують послідовно дві категорії сигналів вимірювань. Іншим джерелом похибки вимірювань є кут нахилу детектора 4 або 4' по відношенню до стінки лопатки 3, який утворюється при встановленні опорного важеля 9 до лопатки 3 внаслідок її згину. Проте можна легко виконати коректування, оскільки, як можна бачити, кут нахилу впливає тільки на відношення між дійсною й уявною частиною сигналу на виході вольтметра 14. Отже можна стверджувати, що більш точним є вираз: Xcn=aRcn+b, де а є коефіцієнтом, котрий залежить від кута нахилу детектора 4 відносно лопатки 1. Таким чином, для проведення коректування достатньо подати прийняті сигнали в додаткову мережу нейронів, яка б видавала випрямлений сигнал, що є сигналом, який отримується за допомогою детектора 4 або 4', розміщеним під прямим кутом відносно стінки 2. Навчання додаткової мережі нейронів виконують шляхом переміщування детектора 4 по смугах 3.1 під різними кутами для визначення величин коефіцієнта а. Слід зауважити, що інші детектори вихорових струмів, наприклад, детектори із симетричною відносно осі центральною котушкою, що випромінює електромагнітні хвилі в усіх напрямках, у даному застосуванні дають дуже неточні результати, у той час як за допомогою винаходу можна одержати точність зі стандартною похибкою 10мкм при вимірюванні товщини лопатки з перегородками завтовшки декілька міліметрів.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measuring the thickness of the wall of a hollow blade
Назва патенту російськоюСпособ измерения толщины стенки полой лопасти
МПК / Мітки
МПК: G01N 27/90, G01B 7/00, G01B 7/02
Мітки: спосіб, товщини, стінки, вимірювання, порожнистої, лопатки
Код посилання
<a href="https://ua.patents.su/4-73948-sposib-vimiryuvannya-tovshhini-stinki-porozhnisto-lopatki.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання товщини стінки порожнистої лопатки</a>
Пристрій для інтраопераційного вимірювання товщини стінки порожнистого органа
Номер патенту: 30335
Опубліковано: 15.11.2000
Автор: Палієнко Руслан Капітонович
МПК: A61B 5/00, G01B 3/22, G01B 5/02
Мітки: порожнистого, товщини, інтраопераційного, вимірювання, органа, пристрій, стінки
Формула / Реферат:
Пристрій для інтраопераційного вимірювання товщини стінки порожнистого органа, що вміщує вимірювальну головку індикатора годинникового типу із прикріпленим до неї рухомим стержнем, який відрізняється тим, що рухомий стержень подовжений, а до корпуса вимірювальної головки нерухомо прикріплений ключкоподібний стержень, який паралельно розташований до рухомого стержня.
Спосіб ультразвукового контролю товщини стінки труб
Номер патенту: 29300
Опубліковано: 16.10.2000
Автори: Гуляєв Геннадій Іванович, Анікєєв Яків Фокич, Кожевніков Володимир Іванович
МПК: G01N 29/04, G01N 29/07
Мітки: труб, стінки, товщини, ультразвукового, контролю, спосіб
Формула / Реферат:
Спосіб ультразвукового контролю товщини стінки труб, відповідно котрому у стінку труби, яка зазнає поступально-обертальне переміщення через імерсійну рідину, за допомогою випромінювача проводять зведення ультразвукових коливань та сприймають приймачем сигнали, котрі пройшли через стінку труби, а величину товщини стінки визначають шляхом порівняння амплітуд цих сигналів з амплітудами сигналів від еталонів, якій відрізняється тим що контроль...
Пристрій для вимірювання товщини діелектричних покриттів на металевих виробах
Номер патенту: 54064
Опубліковано: 17.02.2003
Автори: Кошовий Микола Дмитрович, Цеховський Максим Володимирович, Гаєвий Василь Олексійович
МПК: G01N 27/00, G01B 7/02
Мітки: металевих, товщини, вимірювання, виробах, діелектричних, пристрій, покриттів
Формула / Реферат:
Пристрій для вимірювання товщини діелектричних покриттів на металевих виробах, який містить операційний підсилювач, безконтактний магніточутливий вимірювальний перетворювач з обмоткою живлення та обмоткою зворотного зв'язку, кінець якої під'єднано до входу підсилювача, а початок - до заземленого кінця обмотки живлення, резистор, одним кінцем під'єднаний до початку обмотки живлення, а другим - до виходу операційного підсилювача, послідовно...
Спосіб вимірювання товщини залишкового шару порушеної структури на монокристалічній підкладці діркового телуриду кадмію
Номер патенту: 25598
Опубліковано: 30.10.1998
Автори: Українець Наталія Андріївна, Українець Валентин Остапович, Ільчук Григорій Архипович
МПК: G01N 27/22
Мітки: телуриду, монокристалічний, порушеної, залишкового, підкладці, спосіб, кадмію, шару, діркового, товщини, структури, вимірювання
Формула / Реферат:
Спосіб вимірювання товщини залишкового шару порушеної структури на монокристалічній підкладці діркового телуриду кадмію, який включає травлення механічно обробленої поверхні діркового телуриду кадмію, який відрізняється тим, що на поверхні діркового телуриду кадмію створюють бар'єр Шотткі із металів з низькою температурою плавлення, вимірюють залежність диференціальної ємності від регульованого постійного зміщення, по якій визначають...
Пристрій для вимірювання товщини діелектричних покриттів на металевих виробах
Номер патенту: 60137
Опубліковано: 15.09.2003
Автори: Гаєвий Василь Олексійович, Цеховський Максим Володимирович, Кошовий Микола Дмитрович
МПК: G01B 7/02
Мітки: металевих, покриттів, вимірювання, виробах, пристрій, товщини, діелектричних
Формула / Реферат:
Пристрій для вимірювання товщини діелектричних покриттів на металевих виробах, який містить накладний вихрострумовий перетворювач, послідовно з'єднаний з діодним мостом і фільтром, джерело зразкової напруги та індикатор, який відрізняється тим, що введено віднімач напруги, до першого входу якого через систему ключів вбудованого контролю під'єднують або джерело зразкової напруги, або фільтр, а до другого - подільник напруги, а також...