Вертикальний багатоцільовий верстат
Номер патенту: 93286
Опубліковано: 25.09.2014
Автори: Кузнєцов Юрій Миколайович, Кеба Павло Васильович, Цвид Тарас Антонович
Формула / Реферат
Вертикальний багатоцільовий верстат, що містить каркасну несучу систему у вигляді чотиригранної призми, горизонтальний координатний стіл, систему автоматичної зміни інструмента та інструментальний магазин, який відрізняється тим, що верстат має розміщену всередині каркасну несучу систему у вигляді чотиригранної піраміди, біля вершини якої встановлено самодіючий мотор-шпиндель з вертикальним переміщенням інструмента, при цьому верстат обладнаний щонайменше одним додатковим багатокоординатним технологічним роботом-триглайдом з додатковою поворотною координатою.
Текст
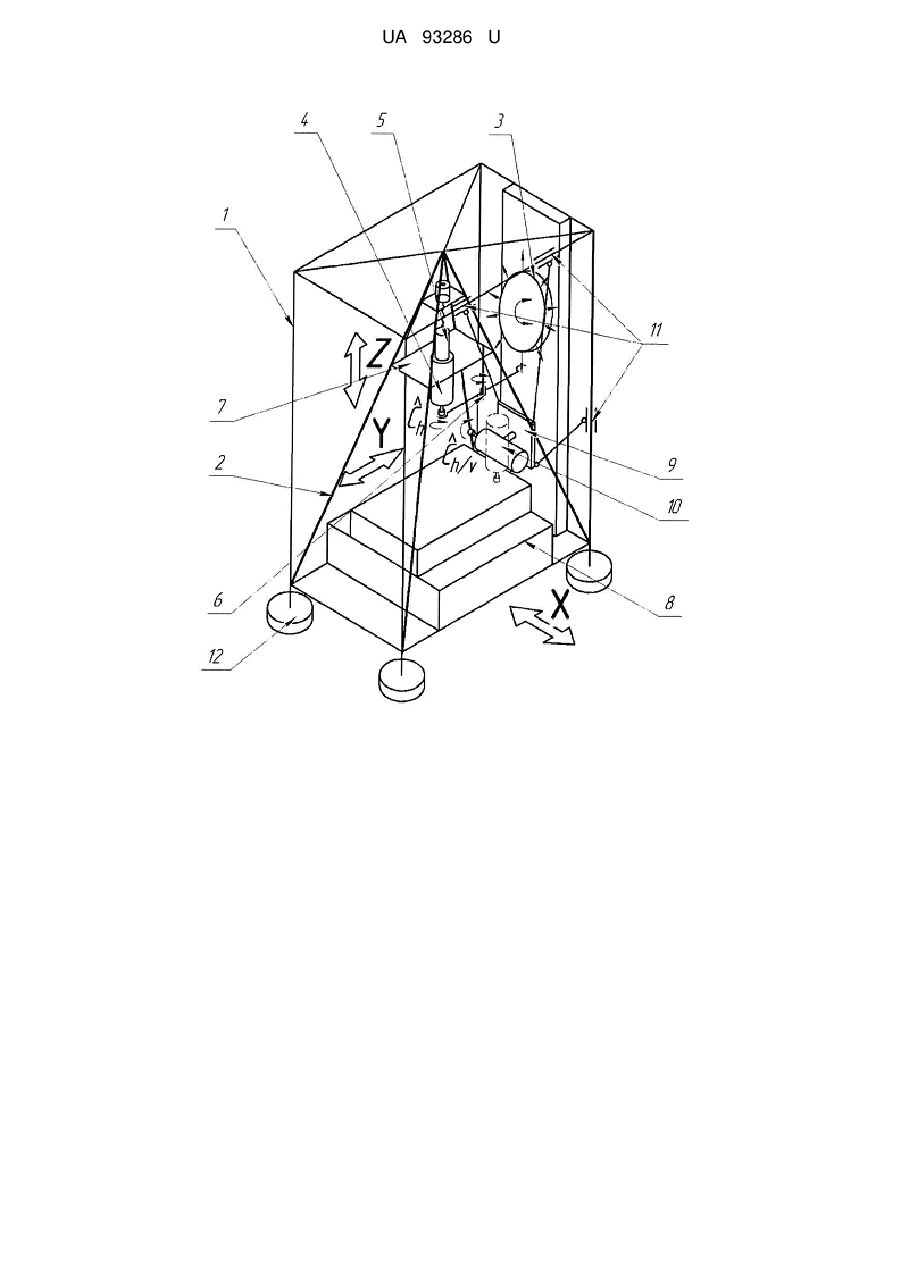
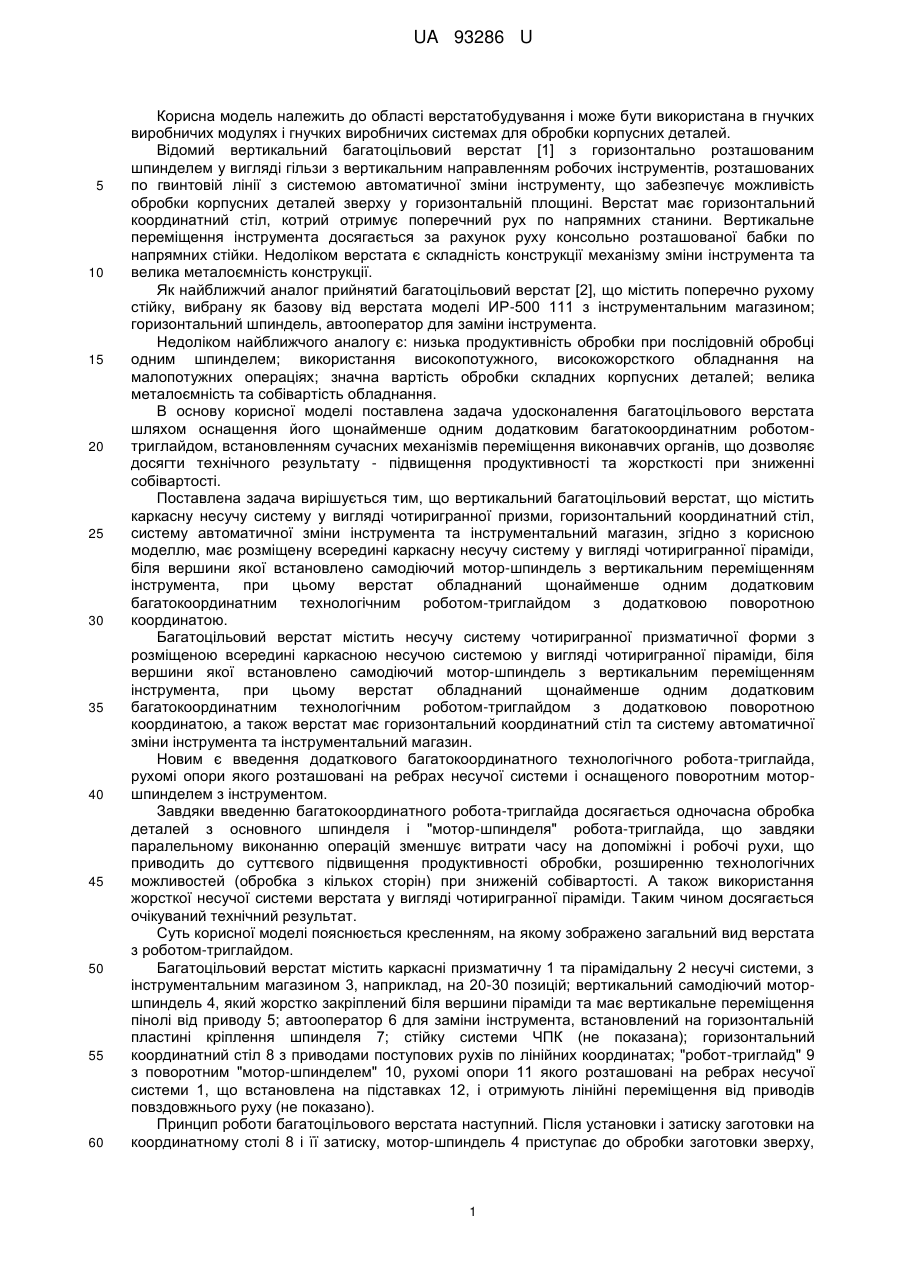
Реферат: UA 93286 U UA 93286 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до області верстатобудування і може бути використана в гнучких виробничих модулях і гнучких виробничих системах для обробки корпусних деталей. Відомий вертикальний багатоцільовий верстат [1] з горизонтально розташованим шпинделем у вигляді гільзи з вертикальним направленням робочих інструментів, розташованих по гвинтовій лінії з системою автоматичної зміни інструменту, що забезпечує можливість обробки корпусних деталей зверху у горизонтальній площині. Верстат має горизонтальний координатний стіл, котрий отримує поперечний рух по напрямних станини. Вертикальне переміщення інструмента досягається за рахунок руху консольно розташованої бабки по напрямних стійки. Недоліком верстата є складність конструкції механізму зміни інструмента та велика металоємність конструкції. Як найближчий аналог прийнятий багатоцільовий верстат [2], що містить поперечно рухому стійку, вибрану як базову від верстата моделі ИР-500 111 з інструментальним магазином; горизонтальний шпиндель, автооператор для заміни інструмента. Недоліком найближчого аналогу є: низька продуктивність обробки при послідовній обробці одним шпинделем; використання високопотужного, високожорсткого обладнання на малопотужних операціях; значна вартість обробки складних корпусних деталей; велика металоємність та собівартість обладнання. В основу корисної моделі поставлена задача удосконалення багатоцільового верстата шляхом оснащення його щонайменше одним додатковим багатокоординатним роботомтриглайдом, встановленням сучасних механізмів переміщення виконавчих органів, що дозволяє досягти технічного результату - підвищення продуктивності та жорсткості при зниженні собівартості. Поставлена задача вирішується тим, що вертикальний багатоцільовий верстат, що містить каркасну несучу систему у вигляді чотиригранної призми, горизонтальний координатний стіл, систему автоматичної зміни інструмента та інструментальний магазин, згідно з корисною моделлю, має розміщену всередині каркасну несучу систему у вигляді чотиригранної піраміди, біля вершини якої встановлено самодіючий мотор-шпиндель з вертикальним переміщенням інструмента, при цьому верстат обладнаний щонайменше одним додатковим багатокоординатним технологічним роботом-триглайдом з додатковою поворотною координатою. Багатоцільовий верстат містить несучу систему чотиригранної призматичної форми з розміщеною всередині каркасною несучою системою у вигляді чотиригранної піраміди, біля вершини якої встановлено самодіючий мотор-шпиндель з вертикальним переміщенням інструмента, при цьому верстат обладнаний щонайменше одним додатковим багатокоординатним технологічним роботом-триглайдом з додатковою поворотною координатою, а також верстат має горизонтальний координатний стіл та систему автоматичної зміни інструмента та інструментальний магазин. Новим є введення додаткового багатокоординатного технологічного робота-триглайда, рухомі опори якого розташовані на ребрах несучої системи і оснащеного поворотним моторшпинделем з інструментом. Завдяки введенню багатокоординатного робота-триглайда досягається одночасна обробка деталей з основного шпинделя і "мотор-шпинделя" робота-триглайда, що завдяки паралельному виконанню операцій зменшує витрати часу на допоміжні і робочі рухи, що приводить до суттєвого підвищення продуктивності обробки, розширенню технологічних можливостей (обробка з кількох сторін) при зниженій собівартості. А також використання жорсткої несучої системи верстата у вигляді чотиригранної піраміди. Таким чином досягається очікуваний технічний результат. Суть корисної моделі пояснюється кресленням, на якому зображено загальний вид верстата з роботом-триглайдом. Багатоцільовий верстат містить каркасні призматичну 1 та пірамідальну 2 несучі системи, з інструментальним магазином 3, наприклад, на 20-30 позицій; вертикальний самодіючий моторшпиндель 4, який жорстко закріплений біля вершини піраміди та має вертикальне переміщення пінолі від приводу 5; автооператор 6 для заміни інструмента, встановлений на горизонтальній пластині кріплення шпинделя 7; стійку системи ЧПК (не показана); горизонтальний координатний стіл 8 з приводами поступових рухів по лінійних координатах; "робот-триглайд" 9 з поворотним "мотор-шпинделем" 10, рухомі опори 11 якого розташовані на ребрах несучої системи 1, що встановлена на підставках 12, і отримують лінійні переміщення від приводів повздовжнього руху (не показано). Принцип роботи багатоцільового верстата наступний. Після установки і затиску заготовки на координатному столі 8 і її затиску, мотор-шпиндель 4 приступає до обробки заготовки зверху, 1 UA 93286 U 5 10 виконуючи чорнову важконавантажену і чистову обробки. В цей же час робот-триглайд 9 завдяки приводу встановлюється в необхідну позицію збоку і виконує неважконавантажені слюсарні операції (свердління, цекування фасок, різьбонарізання отворів невеликих діаметрів, зенкерування, розвернення), які не потребують великої потужності різання і високої жорсткості технологічної системи. Зміна інструмента здійснюється при виведенні "мотор-шпинделя" 4 в початкове положення. Виконується розтиск патрона і автоматичний оператор захоплює інструмент. Виконується поворотний рух механізму зміни інструмента. Відпрацювавший інструмент при цьому потрапляє у порожнє гніздо магазина 3. Всі рухи позначені стрілками. Джерела інформації: 1. Патент України № 21763А, МПК B23Q3/155. 2. Патент України № 35573, МПК B23Q3/157. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 Вертикальний багатоцільовий верстат, що містить каркасну несучу систему у вигляді чотиригранної призми, горизонтальний координатний стіл, систему автоматичної зміни інструмента та інструментальний магазин, який відрізняється тим, що верстат має розміщену всередині каркасну несучу систему у вигляді чотиригранної піраміди, біля вершини якої встановлено самодіючий мотор-шпиндель з вертикальним переміщенням інструмента, при цьому верстат обладнаний щонайменше одним додатковим багатокоординатним технологічним роботом-триглайдом з додатковою поворотною координатою. Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюKeba Pavlo Vasyliovych
Автори російськоюКеба Павел Васильевич
МПК / Мітки
МПК: B23Q 3/155
Мітки: багатоцільовий, вертикальний, верстат
Код посилання
<a href="https://ua.patents.su/4-93286-vertikalnijj-bagatocilovijj-verstat.html" target="_blank" rel="follow" title="База патентів України">Вертикальний багатоцільовий верстат</a>
Багатоцільовий верстат
Номер патенту: 35573
Опубліковано: 25.09.2008
Автор: Кузнєцов Юрій Миколайович
МПК: B23Q 3/157
Мітки: верстат, багатоцільовий
Формула / Реферат:
1. Багатоцільовий верстат, що містить основну стійку, шпиндельну бабку з вертикально рухомим горизонтальним шпинделем, горизонтальний поворотний стіл, систему автоматичної зміни інструменту та інструментальний магазин, який відрізняється тим, що верстат має додатковий багатокоординатний технологічний робот - "робот-слюсар" на стійці, яка змонтована на горизонтальній підставці і оснащена інструментотримачем, додатковим магазином...
Багатоцільовий верстат
Номер патенту: 53965
Опубліковано: 25.10.2010
Автори: Харченко Олександр Олегович, Федоренко Сергій Миколайович, Рапацький Юрій Леонідович
МПК: B23Q 1/00, B23Q 3/155
Мітки: багатоцільовий, верстат
Формула / Реферат:
Багатоцільовий верстат, що містить станину, шпиндельну бабку, магазин у вигляді інструментального ланцюга із зірочками й підтримувальними роликами, привод ланцюга, механізм автоматичної зміни інструмента, який відрізняється тим, що інструментальний ланцюг із зірочками, підтримувальними роликами й приводом ланцюга розташований на торцевій поверхні поворотного диска й виконаний у вигляді вкороченої гіпоциклоїди із числом зірочок у її вершин не...
Токарний багатоцільовий верстат
Номер патенту: 65394
Опубліковано: 12.12.2011
Автор: Кузнєцов Юрій Миколайович
МПК: B23B 5/00
Мітки: токарний, верстат, багатоцільовий
Формула / Реферат:
Токарний багатоцільовий верстат, що містить станину з напрямними, передню нерухому і задню рухому бабки з приводами обертання шпиндельних вузлів з затискними патронами, револьверну головку, розташовану на корпусі хрестового супорта, який відрізняється тим, що передня бабка виконана у вигляді мотор-шпинделя з механізованим затискним патроном для заготовки, а задня бабка містить мотор-шпиндель пінольного типу з висувним шпиндельним вузлом,...
Багатоцільовий верстат-гексапод
Номер патенту: 63433
Опубліковано: 10.10.2011
Автори: Вахніченко Дмитро Володимирович, Валявський Анатолій Іванович, Павленко Іван Іванович, Валявський Іван Анатолійович
МПК: B23Q 1/00
Мітки: верстат-гексапод, багатоцільовий
Формула / Реферат:
Багатоцільовий верстат-гексапод, що складається з нерухомої платформи, на якій розташована рухома платформа, призначена для закріплення та надання заготовці шести координатних рухів, і рухома платформа - для інструмента, який також реалізує шість координатних рухів, рухома платформа зв'язана з основою шістьма кінематичними ланками змінної довжини, а друга рухома платформа - з'єднана шістьма кінематичними ланками, який відрізняється тим, що...
Токарний багатоцільовий верстат
Номер патенту: 48735
Опубліковано: 25.03.2010
Автори: Савицький Сергій Олександрович, Кузнєцов Юрій Миколайович, Дмитрієв Дмитро Олексійович, Грисюк Олександр Віталійович, Подольський Михайло Ігорович, Рожко Оксана Ігорівна
Мітки: токарний, верстат, багатоцільовий
Формула / Реферат:
Токарний багатоцільовий верстат, що містить станину з повздовжніми напрямними під каретку супорта, шпиндельну бабку із шпиндельним вузлом і затискним патроном, задню бабку і револьверну головку, розташовану на корпусі рухомої частини, яка встановлена через шарнірні з'єднання на штангах постійної довжини з можливістю переміщення від приводів по напрямних протилежних кінців штанг, шарнірно зв'язаних з повзунами, який відрізняється тим, що...
Попередній патент: Наповнювач для вібраційного змішування
Наступний патент: Зубчаста пружна муфта
Випадковий патент: Спосіб отримання синтетичного димеру ціановірину з підсиленою антивірусною активністю