Позиційний датчик для вимірювання довжини встановлюваного ходу циліндро-поршневої групи
Формула / Реферат
1. Позиційний датчик (1) для вимірювання довжини встановлюваного ходу гідравлічної циліндро-поршневої групи (3, 4), що передає навантаження на опорні подушки валків (2) кліті прокатного стана, причому позиційний датчик (1) призначений для вимірювання відносного зміщення двох складових частин (3, 4) циліндро-поршневої групи (3, 4) в напрямі (а) їх зміщення, при цьому позиційний датчик (1) оснащений з'єднувальним елементом (5) для усунення впливу на позиційний датчик (1) перекидаючих рухів, зумовлених, наприклад, прогинами валків під час прокатного виробництва, який відрізняється тим, що з'єднувальний елемент (5) оснащений щонайменше одним першим плоским пружинним елементом (6), який проходить в напрямі (а) зміщення, причому один кінець (7) першого плоского пружинного елемента (6) з'єднаний з першою з'єднувальною деталлю (8), а інший кінець (9) першого плоского пружинного елемента (6) з'єднаний з проміжною несучою опорою (10), і також з'єднувальний елемент (5) оснащений щонайменше одним другим плоским пружинним елементом (11), який проходить в напрямі (а) зміщення, причому один кінець (12) другого плоского пружинного елемента (11) з'єднаний з проміжною несучою опорою (10), а інший кінець (13) другого плоского пружинного елемента (11) з'єднаний з другою з'єднувальною деталлю (14), причому площини щонайменше одного першого і щонайменше одного другого плоского пружинного елемента (6, 11) розташовані відносно одна одної з поверненням на кут (a) навколо осі напряму (а) зміщення.
2. Позиційний датчик за п. 1, який відрізняється тим, що кут (a) між двома площинами двох плоских пружинних елементів (6, 11) становить від 60° до 120°.
3. Позиційний датчик за п. 2, який відрізняється тим, що кут (a) між двома площинами двох плоских пружинних елементів (6, 11) становить 90°.
4. Позиційний датчик за одним із пп. 1-3, який відрізняється тим, що проміжна несуча опора (10), при розгляді в напрямі (а) зміщення, розташована поблизу зони другої з'єднувальної деталі (14) або всередині неї.
5. Позиційний датчик за п. 4, який відрізняється тим, що перший плоский пружинний елемент (6) проходить практично лінійно і/або виконаний С-подібним.
6. Позиційний датчик за п. 4 або п. 5, який відрізняється тим, що другий плоский пружинний елемент (11) виконаний U-подібним, причому кінці полиць U-подібної структури розташовані на проміжній несучій опорі (10) і на другій з'єднувальній деталі (14).
7. Позиційний датчик за п. 4 або п. 5, який відрізняється тим, що другий плоский пружинний елемент (11) виконаний у формі подвійної букви U, причому кінці полиць структури, яка має форму подвійної букви U, розташовані на проміжній несучій опорі (10) і на другій з'єднувальній деталі (14).
8. Позиційний датчик за одним із пп. 1-7, який відрізняється тим, що проміжна несуча опора (10) являє собою, переважно, деталь кільцеподібної форми.
Текст
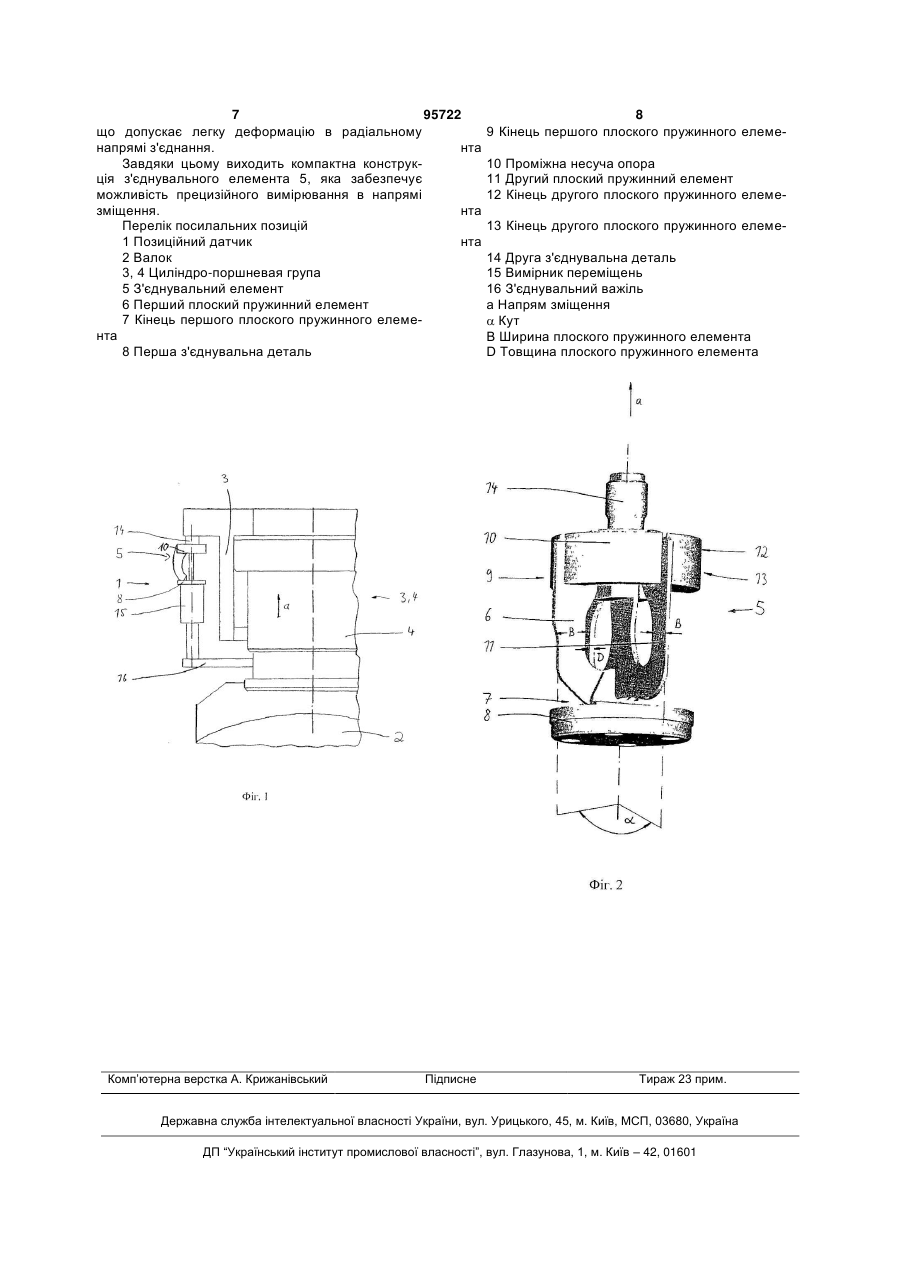
1. Позиційний датчик (1) для вимірювання довжини встановлюваного ходу гідравлічної циліндро-поршневої групи (3, 4), що передає навантаження на опорні подушки валків (2) кліті прокатного стана, причому позиційний датчик (1) призначений для вимірювання відносного зміщення двох складових частин (3, 4) циліндропоршневої групи (3, 4) в напрямі (а) їх зміщення, при цьому позиційний датчик (1) оснащений з'єднувальним елементом (5) для усунення впливу на позиційний датчик (1) перекидаючих рухів, зумовлених, наприклад, прогинами валків під час прокатного виробництва, який відрізняється тим, що з'єднувальний елемент (5) оснащений щонайменше одним першим плоским пружинним елементом (6), який проходить в напрямі (а) зміщення, причому один кінець (7) першого плоского пружинного елемента (6) з'єднаний з першою з'єднувальною деталлю (8), а інший кінець (9) першого плоского пружинного елемента (6) з'єднаний з проміжною несучою опорою (10), і також з'єднувальний елемент (5) оснащений щонайменше одним другим плоским пружинним елементом (11), який проходить в напрямі (а) зміщення, причому один кінець (12) другого плоского пружинного елемента (11) з'єднаний з проміжною несучою опорою (10), а C2 2 (19) 1 3 95722 4 катного стану, причому позиційний датчик признаобмеження ходу, зумовлені обмеженим ходом чений для вимірювання відносного зміщення двох пружини. Крім цього, існує також небезпека заїскладових частин циліндро-поршневої групи в надання спрямовуючого штовхача, що може виклипрямі їх зміщення, і причому позиційний датчик кати помилки при вимірюванні переміщень. Є тазабезпечений з'єднувальним елементом, за допокож ризик нещасного випадку, зв'язаний з могою якого може бути усунений вплив на позипопереднім натягненням пружини при монтажі і ційний датчик, наприклад перекидаючих рухів, демонтажі. Нарешті, є знос пружини або, відповідзумовлених прогинами валків під час прокатного но, спрямовуючих елементів. виробництва. Нестача відомого раніше з'єднання з геометПозиційний датчик такого роду відомий з ЕР 1 ричним замиканням полягає в тому, що необхід001 247 А2. Він застосовується в кліті прокатного ний відносно довгий компенсаційний стрижень, стану, за допомогою якого, наприклад прокатуєтьякий вимагає великої висоти конструкції. ся штаба, яка повинна мати певну товщину. Щоб Тому в основу даного винаходу поставлена зазор між прокатним валком мав точно бажаний задача, таким чином удосконалити позиційний розмір, його величина контролюється за допомодатчик вже названого роду, щоб уникнути вказаних гою вимірювальної системи. Тому позиційний датнедоліків. Тобто позиційний датчик повинен при чик має високу роздільність, що дозволяє здійснюз'єднанні з геометричним замиканням утворювати вати точне вимірювання зазору між прокатним можливість беззазорної і зносостійкої прив'язки валком. При цьому перекидаючі рухи гідравлічного системи, причому все-таки повинна забезпечувациліндра, наприклад зумовлені прогинами валків тися невелика висота конструкції. Зокрема висота під час прокатного виробництва, є дуже небажаконструкції повинна бути значно зменшена в поріними і впливають на результат вимірювання. Тому внянні з відомим раніше рішенням з компенсаційвідоме раніше рішення включає згинальний стриним стрижнем, без відмови від переваг цього ріжень певної довжини з пружною зоною, який розшення. ташований так, що вказані перекидаючі рухи приРішення цієї задачі відповідно до винаходу віводять тільки до бічного прогину згинального дрізняється тим, що з'єднувальний елемент позистрижня, однак, не впливають на вимірювання ційного датчика забезпечений щонайменше одним ефективного зазору між прокатним валком. Тим першим плоским пружинним елементом, який просамим вдається протидіяти спотворенню резульходить в напрямі зміщення, причому один кінець татів вимірювання. першого плоского пружинного елемента з'єднаний Інші рішення відомі з FR 2 570 003 А, з US з першою з'єднувальною деталлю, і причому інший 5029400, з ЕР 1 044 736 В1, з ЕР 0 163 247 А2, з кінець першого плоского пружинного елемента DE 35 15 436 А1, з DE 196 53 023 А1 і з ЕР 1 420 з'єднаний з проміжною несучою опорою; крім того, 898 В1, причому вищеназвана проблема в них, з'єднувальний елемент забезпечений щонайменоднак, не була переважаючою темою. ше одним другим плоским пружинним елементом, У принципі можна сказати, що для вимірюваякий проходить в напрямі зміщення, причому один льних систем, про які йде мова, відомі різні конскінець другого плоского пружинного елемента труктивні рішення корпусу датчика переміщень. з'єднанийз проміжною несучою опорою, і причому Одні з них основані на з'єднанні з силовим замиінший кінець другого плоского пружинного елеменканням вимірювального елемента за допомогою та з'єднаний з другою з'єднувальною деталлю. зусилля пружини. Крім того, відомі з'єднання з геКрім того, винаходом передбачено, що площини ометричним замиканням (див. вказану ЕР 1 001 щонайменше одного першого і щонайменше одно247 А2), в яких застосовується компенсаційний го другого плоского пружинного елемента розтастрижень. Існують також системи вимірювання шовані відносно одна одної зі скручуванням під переміщень, розташовані безпосередньо в циліндеяким кутом навколо осі напряму зміщення. дрі циліндро-поршневої групи. Кут між двома площинами двох плоских пруУ різних рішеннях враховуються різні схеми жинних елементів становить переважно від 60° до монтажу, здатність переміщення або, відповідно, 120°, особливо переважно він становить 90°. необхідна точність вимірювання. При цьому сисПроміжна несуча опора, при розгляді в напрятеми вимірювання переміщень розташовуються мі зміщення, може бути розташована поблизу зони всередині або зовні на циліндрі циліндродругої з'єднувальної деталі або всередині неї. Пепоршневої групи. рший плоский пружинний елемент проходить при При з'єднанні з силовим замиканням відбувацьому переважно практично лінійно, і/або виконається компенсація перекидаючого руху за рахунок ний в формі букви С. Другий плоский пружинний що приводиться в дію зусиллям пружини штовхаелемент виконаний, переважно, в формі букви U, ча, який утворює можливість компенсації вказаних причому кінці полиць U-подібної структури розтаперекидаючих рухів (тобто гойдання) циліндра. шовані на проміжній несучій опорі і на другій з'єдПри з'єднанні з геометричним замиканням віднувальній деталі. Переважний альтернативний бувається компенсація перекидаючого руху за варіант здійснення передбачає, що другий плоский допомогою довгого компенсаційного стрижня, який пружинний елемент виконаний в формі подвійної створює можливість компенсації перекидаючих букви U, причому кінці полиць, яка має форму порухів за рахунок пружної деформації стрижня. двійної букви U структури розташовані на проміжНедолік з'єднання з силовим замиканням поній несучій опорі і на другій з'єднувальній деталі. лягає в тому, що інерція маси системи перешкоПроміжна несуча опора являє собою, переваджає високій точності вимірювання або щонаймежно, деталь кільцеподібної форми. нше негативно впливає на неї. Крім того, існують 5 95722 6 При цьому монтаж з'єднувального елемента компенсувати перекидаючі рухи або, відповідно, відбувається, переважно, в напрямі основної осі рухи гойдання валка 2 і, тим самим, поршня 4. циліндро-поршневої групи. Як це повинно відбуватися за одному з переЗапропоноване рішення відрізняється наступважних варіантів здійснення винаходу, проілюстними різними перевагами. ровано на фіг. 2. Можливе підвищення точності вимірювання З'єднувальний елемент 5 забезпечений двома системи при наявності впливу високих динамічних плоскими пружинними елементами 6 і 11, а саме, прискорень і у разі перекидаючих рухів (гойдання) першим плоским пружинним елементом 6 і другим циліндра. плоским пружинним елементом 11. Обидва плосТим самим, забезпечується висока експлуатаких пружинних елемента 6, 11 виготовлені з тонкої ційна надійність обладнання. пружинної сталі. Ширина В плоских пружинних Внаслідок відсутності застосовуваних пружинелементів 6, 11 значно більша їх товщини D. них елементів, схильних до зносу і що мають певЗ'єднувальний елемент 5 забезпечений, крім ну інерцію маси, можливе зменшення погрішності того, нижньою, першою з'єднувальною деталлю 8, вимірювань, зумовлених системою. а також верхньою, другою з'єднувальною деталлю Є зносостійке з'єднання вимірювального вузла 14. З'єднувальні деталі 8 і 14 з'єднані, як показано з циліндром. Внаслідок цього збільшуються інтерна фіг. 1, з вимірювачем 15 переміщень, відповідвали технічного обслуговування, що приводить до но, з циліндром 3. зменшення витрат. У разі заміни можливе також Крім того, з'єднувальний елемент 5 забезпескорочення часу, необхідного для заміни. чений проміжною несучою опорою 10, яка виконаКрім того, меншає ризик нещасного випадку в на у вигляді відносно масивного кільця. порівнянні з відомими раніше з'єднаннями з силоПерший плоский пружинний елемент 6 одним вим замиканням. Відсутня необхідність створення своїм кінцем 7 нерухомо з'єднаний з першою з'єдзусиль попереднього натягнення пружини. нувальною деталлю 8. Другим своїм кінцем 9 перКомпактна конструкція дозволяє зменшити виший плоский пружинний елемент 6 нерухомо з'єдсоту системи при невеликому діаметрі. Це дозвонаний з проміжною несучою опорою 10. ляє уніфікувати корпус датчика в чорновій кліті Другий плоский пружинний елемент 11 одним або, відповідно, в чистовій кліті. своїм кінцем 12 нерухомо з'єднаний з проміжною Отже, завдяки винаходу, що пропонується монесучою опорою 10, а іншим своїм кінцем 13 з дружна одержати компактну конструкцію позиційного гою з'єднувальною деталлю 14. датчика, причому це досягається при з'єднанні з Обидва плоских пружинних елемента 6, 11 загеометричним замиканням позиційного датчика вдяки співвідношенню їх товщини і ширини вико(прив'язка з геометричним замиканням вузла винані плоскими і рівними, так що задані відповідні мірювання переміщень до рухливого циліндра для площини, в яких вони проходять. Передбачено, що визначення його переміщення), тобто можна відплощини першого і другого пружинних елементів мовитися від з'єднання з силовим замиканням з 6, 11 розташовані одна відносно одної зі скручувже названими недоліками. ванням під кутом а навколо осі напряму а зміщенНа кресленнях зображений приклад здійснення. ня винаходу. Показано: Це означає, що в напрямі а зміщення кожний Фіг. 1 - схематичний вигляд збоку частини цирух з'єднувальної деталі 8 прямо і безпосередньо ліндра циліндро-поршневої групи, за допомогою може бути перенесений на з'єднувальну деталь якої можлива перестановка валка кліті прокатного 14, завдяки чому забезпечується висока точність стану в радіальному напрямі валка, причому с вимірювання. Перекидаючі рухи або, відповідно, позиційний датчик положення валка, і рухи гойдання валка 2 або, відповідно, поршня 4 Фіг. 2 - вигляд в перспективі з'єднувального приводять, однак, до відхилення, перпендикулярелемента позиційного датчика за фіг. 1. ного напряму а зміщення, що примушує плоскі На фіг. 1 видний валок 2 кліті прокатного стапружинні елементи 6, 11 здійснювати тільки бічне ну, за допомогою якого, наприклад прокатується відхилення, яке може бути без ускладнень скомштаба. Щоб встановити валок 2 кліті прокатного пенсоване плоскими пружинними елементами 6, стану на заданий зазор, є циліндро-поршнева гру11 без істотного впливу на результат вимірювання. па 3, 4, яка включає циліндр 3, в якому переміщуПри цьому площини обох плоских пружинних ється поршень 4. Для того щоб встановити валок 3 елементів 6, 11 переважно розташовані під прявідповідним чином, поршень 4 може рухатися в мим кутом (=90°) одна до одної, так що можливе напрямі а зміщення. сприйняття або, відповідно, компенсація будь-яких Оскільки величина зазора між валком повинна рухів гойдання. бути точно відома, є позиційний датчик 1, за допоПерший плоский пружинний елемент 6 прохомогою якого можна виконувати відповідне вимірюдить практично прямо між з'єднувальною деталлю вання. Позиційний датчик 1 розташований між 8 і проміжною несучою опорою 10, однак, він має циліндром 3 - і через з'єднувальний важіль 16 злегка С-подібну форму (див. фіг. 2). Другий плоспоршнем 4, так що можна виміряти відносне покий пружинний елемент 11 виконаний в формі положення поршня 4 і циліндра 3 в напрямі а змідвійного "U" (див. фіг. 2). щення за допомогою вимірювача 15 переміщень. Це означає, що з'єднувальний елемент 5 заПри цьому вимірювач 15 переміщень через з'єднувдяки виникаючому перенаправленю зусиль через вальний елемент 5 прив'язаний до циліндра 3. плоскі пружинні елементи 6, 11 між двома з'єднуЗ'єднувальний елемент повинен передавати без вальними деталями 8 і 14 утворює можливість спотворення руху в напрямі а зміщення, однак жорсткого в осьовому напрямі, однак пружного і 7 95722 що допускає легку деформацію в радіальному напрямі з'єднання. нта Завдяки цьому виходить компактна конструкція з'єднувального елемента 5, яка забезпечує можливість прецизійного вимірювання в напрямі зміщення. нта Перелік посилальних позицій 1 Позиційний датчик нта 2 Валок 3, 4 Циліндро-поршневая група 5 З'єднувальний елемент 6 Перший плоский пружинний елемент 7 Кінець першого плоского пружинного елемента 8 Перша з'єднувальна деталь Комп’ютерна верстка А. Крижанівський Підписне 8 9 Кінець першого плоского пружинного елеме10 Проміжна несуча опора 11 Другий плоский пружинний елемент 12 Кінець другого плоского пружинного елеме13 Кінець другого плоского пружинного елеме14 Друга з'єднувальна деталь 15 Вимірник переміщень 16 З'єднувальний важіль а Напрям зміщення Кут В Ширина плоского пружинного елемента D Товщина плоского пружинного елемента Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPosition sensor for measuring idle stroke of hydraulic piston/cylinder system
Автори англійськоюSeidel, Ralf, Franz, Rolf
Назва патенту російськоюПозиционный датчик для измерения длины устанавливаемого хода гидравлической цилиндропоршневой группы
Автори російськоюЗайдель Ральф, Франц Рольф
МПК / Мітки
МПК: B21B 38/00
Мітки: датчик, позиційний, встановлюваного, групи, циліндро-поршневої, ходу, довжини, вимірювання
Код посилання
<a href="https://ua.patents.su/4-95722-pozicijjnijj-datchik-dlya-vimiryuvannya-dovzhini-vstanovlyuvanogo-khodu-cilindro-porshnevo-grupi.html" target="_blank" rel="follow" title="База патентів України">Позиційний датчик для вимірювання довжини встановлюваного ходу циліндро-поршневої групи</a>
Спосіб електрохімікомеханічного припрацювання деталей циліндро-поршневої групи
Номер патенту: 3298
Опубліковано: 27.12.1994
Автори: Алексеєв Валерій Павлович, Волдарь Леонід Нікіфорович
МПК: B23H 9/12
Мітки: групи, деталей, спосіб, циліндро-поршневої, припрацювання, електрохімікомеханічного
Формула / Реферат:
1. Способ электрохимикомеханической приработки деталей цилиндро-поршневой группы двигателей внутреннего сгорания, при котором прирабатываемым деталям придают относительное перемещение и подключают к ним источник переменного электрического тока, отличающийся тем, что источник тока подключают к противоположным сторонам блока цилиндров в общей плоскости осей цилиндров.2. Способ по п.1, отличающийся тем, что источник тока подключает через...
Спосіб припрацювання деталей циліндро-поршневої групи дизелів

Номер патенту: 52075
Опубліковано: 10.08.2010
Автор: Барановський Денис Миколайович
МПК: F02B 9/00
Мітки: дизелів, припрацювання, групи, циліндро-поршневої, спосіб, деталей
Формула / Реферат:
Спосіб припрацювання деталей циліндро-поршневої групи дизелів, який відрізняється тим, що у камеру згоряння разом з повітрям подається природний графіт з модифікатором.
Спосіб ремонту циліндро-поршневої групи двигуна внутрішнього згорання та пристрій для його здійснення
Номер патенту: 54341
Опубліковано: 17.02.2003
Автори: Медвідь Володимир Станіславович, Яковець Сергій Олександрович, Фурманов Віктор Анатолійович, Богомол Володимир Іванович, Яковлев Віталій Васильович, Немчин Данило Олександрович
МПК: F02B 75/18
Мітки: згорання, ремонту, здійснення, внутрішнього, групи, циліндро-поршневої, двигуна, пристрій, спосіб
Формула / Реферат:
1. Спосіб ремонту циліндро-поршневої групи двигуна внутрішнього згорання, що містить дефектацію та відновлення клапанного механізму зі штовхачами, блока циліндрів зі з'єднувальними шпильками, головки і гільзи циліндрів, колінчастого і розподільчого валів, а також збирання і стендовий ремонт двигуна, при якому здійснюють у тому числі кантування двигуна, а також провертання колінчастого і розподільчого валів, який відрізняється тим, що при...
Спосіб підвищення задиростійкості трибосполучень деталей циліндро-поршневої групи
Номер патенту: 49555
Опубліковано: 26.04.2010
Автори: Тихий Андрій Анатолійович, Кузик Олександр Володимирович, Голуб Андрій Анатолійович, Лізунов Сергій Миколайович, Варламов Олександр Олександр, Аулін Віктор Васильович, Лисенко Сергій Володимирович, Голуб Дмитро Вадимович
МПК: B23H 5/00
Мітки: задиростійкості, підвищення, деталей, циліндро-поршневої, спосіб, трибосполучень, групи
Формула / Реферат:
Спосіб підвищення задиростійкості трибосполучень деталей циліндро-поршневої групи, який включає механічні методи нанесення маслоутримуючого рельєфу та протизадирних покриттів на робочу поверхню втулок і поршнів, який відрізняється тим, що обробка відбувається концентрованими потоками енергії з подаванням дисульфід молібдену (MoS2) в зону оплавлення.
Датчик для вимірювання температури і магнітного поля
Номер патенту: 33148
Опубліковано: 15.02.2001
Автори: Варшава Славомир Степанович, Прохорович Анатолій Вікторович, Венгер Евген Федорович, Ющук Степан Іванович
МПК: H01L 43/00, G01K 7/00
Мітки: магнітного, поля, температури, вимірювання, датчик
Текст:
...Х-и,5 з питомим опором 5ии-Іши Омш контакти створені з привареного лудженого мідного дроту, закріпленого ІНДІЄМ. встановлено, що виготовлення чутливого елемента датчика а пресованого марганець-цинкового фериту даного складу І питомого опору *абе»~ печуе добру температурну чутливість датчика в Інтервалі U».,+IOU°C s коефіцієнтом тК0-£ 5&/R, а також його чутливість до магнітних полів s коефіцієнтом^^ Ом /тл дз Оскільки...
Попередній патент: Седативний засіб “клімасед”
Наступний патент: Тренажер панаріна для тракції і корекції хребта в динамічному режимі
Випадковий патент: Спосіб виготовлення цементу або замінників цементу