Самохідний мобільний колієукладач

Формула / Реферат
1. Самохідний мобільний колієукладач, що містить портальну раму, кран-укосину, закріплений на портальній рамі, опори портальної рами, вантажопідйомний механізм, пульт управління, джерело живлення, гусеничні візки і пристрій для приведення в дію згаданих гусеничних візків, при цьому опори портальної рами закріплені на гусеничних візках, джерело живлення виконане у вигляді з'єднаних між собою дизеля і генератора, пульт управління виконаний виносним, а до троса вантажопідйомного механізму приєднана траверса, причому згадана траверса оснащена замками, який відрізняється тим, що він додатково містить робоче місце оператора, убудований пульт управління, механізм поперечного зсуву вантажу від осі колії з гідромотором, другий гідромотор з лебідкою, насосну станцію, тягову лебідку і гідросистему управління виконавчими механізмами, при цьому механізм поперечного зсуву вантажу виконаний сполученим з вантажопідйомним механізмом, механізм поперечного зсуву вантажу встановлений на напрямних, розміщених усередині портальної рами, кожна з опор портальної рами виконана у вигляді з'єднаних між собою напрямного і телескопічного елементів, кран-укосина містить поворотну частину і телескопічну стрілу, розміщену усередині згаданої поворотної частини, пристрій для приведення в дію гусеничних візків виконано у вигляді гідроприводу, тягова лебідка з’єднана зі згаданим гідроприводом, механізм поперечного зсуву вантажу від осі колії з'єднаний із гідромотором, другий гідромотор з лебідкою встановлений на поворотній частині крана-укосини, до складу гідросистеми управління виконавчими механізмами входять насосна станція, гідропривід, гідробак і погоджувальний пристрій, згадана гідросистема управління виконавчими механізмами містить дві незалежні гідросистеми, як виконавчі механізми в гідросистему управління входять гідроциліндр підйому портальної рами, гідравлічні замки стопоріння опор портальної рами, гідроциліндр переміщення механізму поперечного зсуву вантажу, гідроциліндр повороту крана-укосини і гідроциліндр висування телескопічної стріли згаданого крана-укосини, насосна станція з'єднана за допомогою трубопроводів високого тиску зі споживачами, гідропривід з'єднаний з ведучим котком кожного гусеничного візка і валом тягової лебідки, замки траверси виконані у вигляді двох пар гідравлічних зчеплень, розміщених симетрично траверси, кран-укосина закріплений на портальній рамі симетрично її подовжньої осі з можливістю повороту у бік кожного з гусеничних візків, причому напрямні елементи опор портальної рами встановлені вертикально щодо подовжньої осі гусеничного візка і шарнірно прикріплені до силової основи згаданого гусеничного візка, корпус гідроциліндра підйому портальної рами прикріплений до силової основи гусеничного візка, а його шток - до портальної рами, корпус гідроциліндра переміщення механізму поперечного зсуву вантажу прикріплений до портальної рами, а його шток - до корпуса механізму поперечного зсуву вантажу, корпус гідроциліндра повороту крана-укосини прикріплений до портальної рами, а його шток - до поворотної частини крана-укосини, корпус гідроциліндра висування телескопічної стріли згаданого крана-укосини прикріплений до вільного кінця поворотної частини крана-укосини, а його шток - до телескопічної стріли згаданого крана-укосини, корпуси гідравлічних замків стопоріння опор портальної рами прикріплені до корпуса гідроциліндра підйому портальної рами, а їхні фіксатори - до рухомих елементів опор портальної рами.
2. Самохідний мобільний колієукладач за п. 1, який відрізняється тим, що перша гідросистема забезпечує живлення від насосної станції гідравлічних виконавчих механізмів, а друга гідросистема забезпечує за допомогою гідроприводу обертання ведучих котків гусеничного візка і вала тягової лебідки.
3. Самохідний мобільний колієукладач за п. 1, який відрізняється тим, що опори портальної рами містять не менше двох паралельно розташованих між собою конструктивних елементів.
4. Самохідний мобільний колієукладач за п. 1 і п. 3, який відрізняється тим, що напрямна опори портальної рами виконана циліндричної чи будь-якої іншої форми, при цьому рухомий елемент опори виконаний аналогічної форми.
5. Самохідний мобільний колієукладач за п. 1 і пп. 3, 4, який відрізняється тим, що гідроциліндр підйому портальної рами розміщений між опорами портальної рами.
6. Самохідний мобільний колієукладач за п. 1, який відрізняється тим, що кран-укосина встановлений з можливістю переміщення своєї поворотної частини у площині портальної рами на кут до 90° щодо подовжньої осі колієукладача в обидва боки.
7. Самохідний мобільний колієукладач за п. 1, який відрізняється тим, що гусеничний візок містить гусеницю, напрямні, опорні та ведучі катки.
Текст
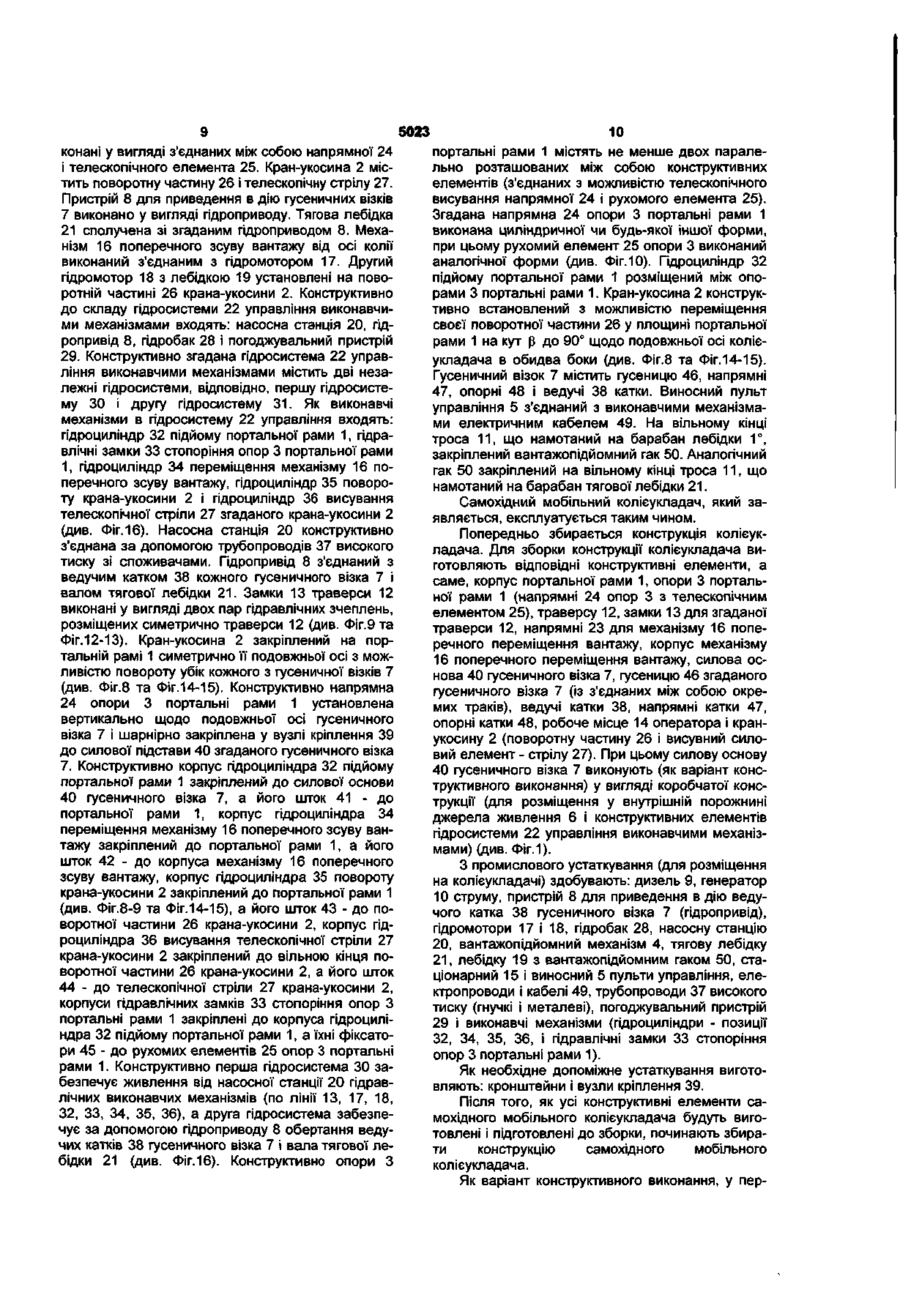
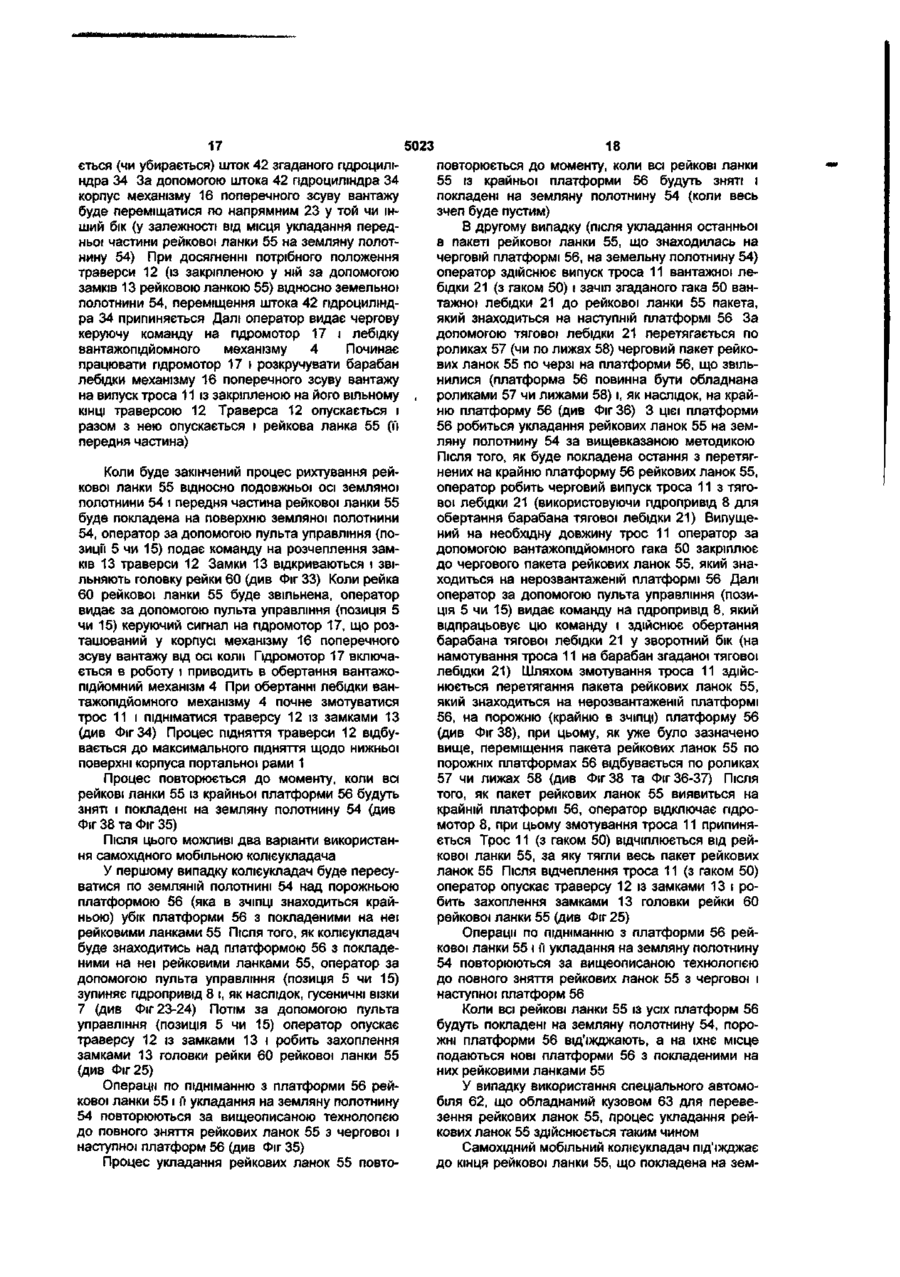
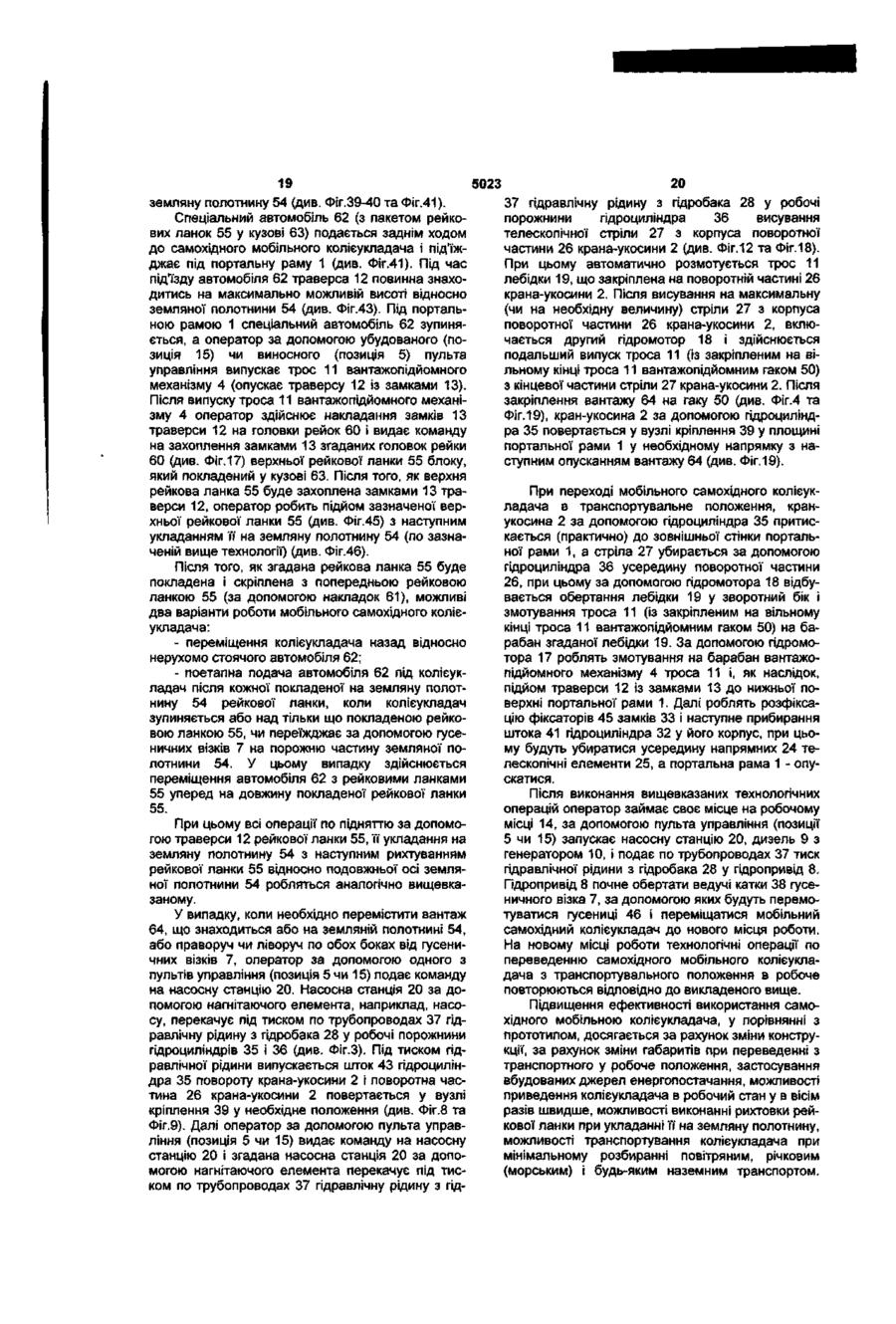
1. Самохідний мобільний колієукладач, що містить портальну раму, кран-укосину, закріплений на портальній рамі, опори портальної рами, вантажопідйомний механізм, пульт управління, джерело живлення, гусеничні візки і пристрій для приведення в дію згаданих гусеничних візків, при цьому опори портальної рами закріплені на гусеничних візках, джерело живлення виконане у вигляді з'єднаних між собою дизеля і генератора, пульт управління виконаний виносним, а до троса вантажопідйомного механізму приєднана траверса, причому згадана траверса оснащена замками, який відрізняється тим, що він додатково містить робоче місце оператора, убудований пульт управління, механізм поперечного зсуву вантажу від осі колії з гідромотором, другий гідромотор з лебідкою, насосну станцію, тягову лебідку і гідросистему управління виконавчими механізмами, при цьому механізм поперечного зсуву вантажу виконаний сполученим з вантажопідйомним механізмом, механізм поперечного зсуву вантажу встановлений на напрямних, розміщених усередині портальної рами, кожна з опор портальної рами виконана у вигляді з'єднаних між собою напрямного і телескопічного елементів, кран-укосина містить поворотну частину і телескопічну стрілу, розміщену усередині згаданої поворотної частини, пристрій для приведення в дію гусеничних візків виконано у вигляді гідроприводу, тягова лебідка з'єднана зі згаданим гідроприводом, механізм поперечного зсуву вантажу від осі колії з'єднаний із гідромотором, другий гідромотор з лебідкою встановлений на поворотній частині крана-укосини, до складу гідросистеми управління виконавчими механізмами входять насосна станція, гідропривід, гідробак і погоджувальний пристрій, згадана гідросистема управління виконавчими механізмами містить дві незалежні гідросистеми, як виконавчі механізми в гідросистему управління входять гідроциліндр підйому портальної рами, гідравлічні замки стопоріння опор портальної рами, гідроциліндр переміщення механізму поперечного зсуву вантажу, гідроциліндр повороту крана-укосини і гідроциліндр висування телескопічної стріли згаданого крана-укосини, насосна станція з'єднана за допомогою трубопроводів високого тиску зі споживачами, гідропривід з'єднаний з ведучим котком кожного гусеничного візка і валом тягової лебідки, замки траверси виконані у вигляді двох пар гідравлічних зчеплень, розміщених симетрично траверси, кран-укосина закріплений на портальній рамі симетрично її подовжньої осі з можливістю повороту у бік кожного з гусеничних візків, причому напрямні елементи опор портальної рами встановлені вертикально щодо подовжньої осі гусеничного візка і шарнірно прикріплені до силової основи згаданого гусеничного візка, корпус гідроциліндра підйому портальної рами прикріплений до силової основи гусеничного візка, а його шток - до портальної рами, корпус гідроциліндра переміщення механізму поперечного зсуву вантажу прикріплений до портальної рами, а його шток - до корпуса механізму поперечного зсуву вантажу, корпус гідроциліндра повороту крана-укосини прикріплений до портальної рами, а його шток - до поворотної частини крана-укосини, корпус гідроциліндра висування телескопічної стріли згаданого кранаукосини прикріплений до вільного кінця поворотної частини крана-укосини, а його шток - до телескопічної стріли згаданого крана-укосини, корпуси гідравлічних замків стопоріння опор портальної рами прикріплені до корпуса гідроциліндра підйому портальної рами, а їхні фіксатори - до рухомих елементів опор портальної рами. 2. Самохідний мобільний колієукладач за п. 1, який відрізняється тим, що перша гідросистема забезпечує живлення від насосної станції гідравлічних виконавчих механізмів, а друга гідросистема забезпечує за допомогою гідроприводу обертання СО см о ю О) 5023 ведучих котків гусеничного візка і вала тягової лебідки 3 Самохідний мобільний колієукладач за п 1, який відрізняється тим, що опори портальної рами містять не менше двох паралельно розташованих між собою конструктивних елементів 4 Самохідний мобільний колієукладач за п 1 і п З, який відрізняється тим, що напрямна опори портальної рами виконана циліндричної чи будьякої іншої форми, при цьому рухомий елемент опори виконаний аналогічної форми 4 5 Самохідний мобільний колієукладач за п 1 і пп З, 4, який відрізняється тим, що гідроциліндр підйому портальної рами розміщений між опорами портальної рами 6 Самохідний мобільний колієукладач за п 1, який відрізняється тим, що кран-укосина встановлений з можливістю переміщення своєї поворотної частини у площині портальної рами на кут до 90° щодо подовжньої осі колієукладача в обидва боки 7 Самохідний мобільний колієукладач за п 1, який відрізняється тим, що гусеничний візок містить гусеницю, напрямні, опорні та ведучі катки Корисна модель відноситься до галузі транспорту, зокрема, до залізничного транспорту, а саме, до пристроїв для укладення рейкових ланок залізничних колій Відомий самохідний мобільний колієукладач, що містить портальну раму, кран-укосину, закріплений на портальній рамі, опори портальної рами, вантажопідйомний механізм, пульт управління, джерело живлення, гусеничні візки і пристрій для приведення в дію згаданих гусеничних ВІЗКІВ /1/ Недоліками відомого самохідного мобільного колієукладача є - необхідність мати додатковий транспортний засіб для переміщення самохідного мобільного колієукладача як до місця укладання рейкових ланок, так і для пересування по земляній полотнині, - складність конструкції, - транспортування до місця проведення роботи можливе лише в розібраному виді, що збільшує час приведення в робочий стан (до 24 годин), - необхідність живлення виконавчих елементів електричним струмом 400В, що утруднено в польових умовах на великому видаленні від лінії електромереж, - кран-укосина виконаний фіксованої довжини, що утрудняє підйом вантажів із близької відстані і вимагає додаткового маневру колієукладача, - неможливо здійснити корекцію укладання рейкової ланки точно по осі земляної полотнини, - великі подовжні габарити портальної рами (більше 25,40м) утруднюють маневреність колієукладача, особливо на криволінійних ділянках земельної полотнини і між схилами насипу Найбільш близькою корисною моделлю як по суті, так і за результатами, що досягаються від використання технічного рішення, яке обрано за прототип, є самохідний мобільний колієукладач, що містить портальну раму, кран-укосину, закріплений на портальній рамі, опори портальної рами, вантажопідйомний механізм, пульт управління, джерело живлення, гусеничні візки і пристрій для приведення в дію згаданих гусеничних ВІЗКІВ, при цьому опори портальної рами закріплені на гусеничних візках, джерело живлення виконане у вигляді з'єднаних між собою дизеля і генератора, пульт управління виконаний виносним, а до троса вантажопідйомного механізму приєднана траверса, причому згадана траверса споряджена замка ми/2/ Недоліками відомого самохідного мобільного колієукладача, який обрано за прототип, є - необхідність мати додатковий транспортний засіб для переміщення самохідного мобільного колієукладача як до місця укладання рейкових ланок, так і для пересування по земляній полотнині, - складність конструкції, - транспортування до місця проведення роботи здійснюється тільки в розібраному положенні, що збільшує час приведення в робочий стан (до 24 годин з залученням великої КІЛЬКОСТІ обслуговуючого персоналу), - необхідність живлення виконавчих елементів електричним струмом 400В, що утруднено в польових умовах на великому видаленні від ЛІНІЙ електромереж, - висока напруга негативно позначається на безпеці роботи обслуговуючого персоналу, особливо в дощ, - для обслуговування замків траверси потрібен додатковий обслуговуючий персонал, - кран-укосина виконаний фіксованої довжини, що утрудняє підйом вантажів із близької відстані і вимагає додаткового маневру колієукладача, - неможливо здійснити корекцію укладання рейкової ланки точно по осі земляної полотнини, - великі подовжні габарити портальної рами (23,50 25,00м) утруднюють маневреність колієукладача, особливо на криволінійних ділянках земельної полотнини і між схилами насипу В основу корисної моделі покладена задача шляхом усунення недоліків прототипу забезпечити підвищення технічних та експлуатаційних характеристик самохідного мобільного колієукладача шляхом зміни конструкції і переходу до вбудованих джерел енергопостачання Суть корисної моделі в самохідному мобільному колієукладачі, який містить портальну раму, кран-укосину, закріплений на портальній рамі, опори портальної рами, вантажопідйомний механізм, пульт управління, джерело живлення, гусеничні візки і пристрій для приведення в дію згаданих гусеничних ВІЗКІВ, при цьому опори портальної рами закріплені на гусеничних візках, джерело живлення виконане у вигляді з'єднаних між собою дизеля і генератора, пульт управління виконаний виносним, а до троса вантажопідйомного механіз 5023 му приєднана траверса, причому згадана траверса споряджена замками, полягає в тому, що самохідний мобільний колієукладач додатково містить робоче місце оператора, убудований пульт управління, механізм поперечного зсуву вантажу від осі колії з гідромотором, другий гідромотор з лебідкою, насосну станцію, тягову лебідку і гідросистему управління виконавчими механізмами. Суть корисної моделі полягає і в тому, що механізм поперечного зсуву вантажу виконаний сполученим з вантажопідйомним механізмом, механізм поперечного зсуву вантажу встановлений на напрямних, розміщених усередині портальної рами, кожна з опор портальної рами виконана у вигляді з'єднаних між собою напрямного і телескопічного елементів, кран-укосина містить поворотну частину і телескопічну стрілу, розміщену у середині згаданої поворотної частини, пристрій для приведення в дію гусеничних візків виконано у вигляді гідроприводу, тягова лебідка сполучена зі згаданим гідроприводом, механізм поперечного зсуву вантажу від осі колії з'єднаний з гідромотором, другий гідромотор з лебідкою встановлений на поворотній частині крана-укосини, до складу гідросистеми управління виконавчими механізмами входять насосна станція, гідропривід, гідробак і погоджувальний пристрій, згадана гідросистема управління виконавчими механізмами містить дві незалежні гідросистеми, як виконавчі механізми в гідросистему управління входять гідроциліндр підйому портальної рами, гідравлічні замки стопоріння опор портальної рами, гідроциліндр переміщення механізму поперечного зсуву вантажу, гідроциліндр повороту крана-укосини і гідроциліндр висування телескопічної стріли згаданого кранаукосини, насосна станція з'єднана за допомогою трубопроводів високого тиску зі споживачами, гідропривід з'єднаний з ведучим катком кожного гусеничного візка і валом тягової лебідки, замки траверси виконані у вигляді двох пар гідравлічних зчеплень, розміщених симетрично траверси, кранукосина закріплений на портальній рамі симетрично її подовжньої осі з можливістю повороту убік кожного з гусеничних візків. Суть корисної моделі полягає також і в тому, що напрямні елементи опор портальної рами встановлені вертикально щодо подовжньої осі гусеничного візку і шарнірно прикріплені до силової основи згаданого гусеничного візка, корпус гідроциліндра підйому портальної рами прикріплений до силової основи гусеничного візка, а його шток до портальної рами, корпус гідроциліндра переміщення механізму поперечного зсуву вантажу прикріплений до портальної рами, а його шток - до корпуса механізму поперечного зсуву вантажу, корпус гідроциліндра повороту крана-укосини прикріплений до портальної рами, а його шток - до поворотної частини крана-укосини, корпус гідроциліндра висування телескопічної стріли згаданого крана-укосини прикріплений до вільного кінця поворотної частини крана-укосини, а його шток - до телескопічної стріли згаданого крана-укосини, корпуси гідравлічних замків стопоріння опор портальної рами прикріплені до корпусу опор портальної рами прикріплені до корпусу гідроциліндра підйому портальної рами, а їхні фіксатори - до рухомих елементів опор портальної рами. Новим в самохідному мобільному колієукладачі є те, що перша гідросистема забезпечує живлення від насосної станції гідравлічних виконавчих механізмів, а друга гідросистема забезпечує за допомогою гідроприводу обертання ведучих катків гусеничного візка і вала тягової лебідки, опори портальної рами містять не менше двох паралельно розташованих між собою конструктивних елементів, напрямна опори портальної рами виконана циліндричної чи будь-якої іншої форми, рухомий елемент опори виконаний аналогічної форми, гідроциліндр підйому портальної рами розміщений між опорами портальної рами, кранукосина встановлений з можливістю переміщення своєї поворотної частини у площині портальної рами на кут до 90° щодо подовжньої осі колієукладача в обидва боки, а гусеничний візок містить гусеницю, напрямні, опорні та ведучі катки. Порівняльний аналіз корисної моделі, яка заявляється, із прототипом, дозволяє зробити висновок, що самохідний мобільний колієукладач відрізняється тим, що він додатково містить робоче місце оператора, убудований пульт управління, механізм поперечного зсуву вантажу від осі колії з гідромотором, другий гідромотор з лебідкою, насосну станцію, тягову лебідку і гідросистему управління виконавчими механізмами, при цьому механізм поперечного зсуву вантажу виконаний сполученим з вантажопідйомним механізмом, механізм поперечного зсуву ватажу встановлений на напрямних, розміщених усередині портальної рами, кожна з опор портальної рами виконана у вигляді з'єднаних між собою напрямного і телескопічного елементів, кран-укосина містить поворотну частину і телескопічну стрілу, розміщену у середині згаданої поворотної частини, пристрій для приведення в дію гусеничних візків виконано у вигляді гідроприводу, тягова лебідка сполучена зі згаданим гідроприводом, механізм поперечного зсуву вантажу від осі колії з'єднаний з гідромотором, другий гідромотор з лебідкою встановлений на поворотній частині крана-укосини, до складу гідросистеми управління виконавчими механізмами входять насосна станція, гідропривід, гідробак і погоджувальний пристрій, згадана гідросистема управління виконавчими механізмами містить дві незалежні гідросистеми, як виконавчі механізми в гідросистему управління входять гідроциліндр підйому портальної рами, гідравлічні замки стопоріння опор портальної рами, гідроциліндр переміщення механізму поперечного зсуву вантажу, гідроциліндр повороту крана-укосини і гідроциліндр висування телескопічної стріли згаданого крана-укосини, насосна станція з'єднана за допомогою трубопроводів високого тиску зі споживачами, гідропривід з'єднаний з ведучим катком кожного гусеничного візка і валом тягової лебідки, замки траверси виконані у вигляді двох пар гідравлічних зчеплень, розміщених симетрично траверси, кран-укосина закріплений на портальній рамі симетрично її подовжньої осі з можливістю пово 5023 роту убік кожного з гусеничних ВІЗКІВ, причому напрямні елементи опор портальної рами встановлені вертикально щодо подовжньої осі гусеничного візку і шарнірно прикріплені до силової основи згаданого гусеничного візка, корпус гідроциліндра підйому портальної рами прикріплений до силової основи гусеничного візка, а його шток - до портальної рами, корпус гідроциліндра переміщення механізму поперечного зсуву вантажу прикріплений до портальної рами, а його шток до корпуса механізму поперечного зсуву вантажу, корпус гідроциліндра повороту крана-укосини прикріплений до портальної рами, а його шток - до поворотної частини крана-укосини, корпус гідроциліндра висування телескопічної стріли згаданого крана-укосини прикріплений до вільного кінця поворотної частини крана-укосини, а його шток - до телескопічної стріли згаданого крана-укосини, корпуси гідравлічних замків стопоріння опор портальної рами прикріплені до корпусу гідроциліндра підйому портальної рами, а їхні фіксатори - до рухомих елементів опор портальної рами, перша гідросистема забезпечує живлення від насосної станції гідравлічних виконавчих механізмів, а друга гідросистема забезпечує за допомогою пдроприводу обертання ведучих катків гусеничного візка і вала тягової лебідки, опори портальної рами містять не менше двох паралельно розташованих між собою конструктивних елементів, напрямна опори портальної рами виконана циліндричної чи будь-якої іншої форми, рухомий елемент опори виконаний аналогічної форми, гідроциліндр підйому портальної рами розміщений між опорами портальної рами, кран-укосина встановлений з можливістю переміщення своєї поворотної частини у площині портальної рами на кут до 90° щодо подовжньої осі колієукладача в обидва боки, а гусеничний візок містить гусеницю, напрямні, опорні та ведучі катки Таким чином, самохідний мобільний колієукладач, який заявляється, відповідає критерію корисної моделі«новизна» Суть корисної моделі пояснюється ілюстраціями, де на Фіг 1 показаний загальний вигляд самохідного мобільного колієукладача на виді 3Л спереду зліва з висунутими опорами портальної рами, на Фіг 2 показаний загальний вигляд самохідного мобільного колієукладача на виді % спереду зліва у транспортному положенні (з прибраними опорами портальної рами), на Фіг 3 показаний самохідний мобільний колієукладач на виді збоку з висунутими опорами портальної рами, на Фіг 4 показаний самохідний мобільний колієукладач на виді збоку з висунутими опорами портальної рами та з висунутою телескопічною стрілою кранаукосини (в положенні підняття/опускання вантажу), на Фіг 5 показаний самохідний мобільний колієукладач на виді збоку у транспортному положенні (з прибраними опорами портальної рами та краномукосиною), на Фіг 6 показаний самохідний мобільний колієукладач на виді спереду з висунутими опорами портальної рами, на Фіг 7 показаний самохідний мобільний колієукладач па виді спереду у транспортному положенні (з прибраними опорами портальної рами), на Фіг 8 показаний самохідний мобільний колієукладач на виді зверху з пока 8 зом конструкції та варіантами експлуатаційного положения крана-укосини, на Фіг 9 показаний самохідний мобільний колієукладач і підготовленою до висування телескопічною стрілою, на Фіг 10 показана конструкція опори портальної рами в перетині А-А, на Фіг 11 показана конструкція поворотної частини крана-укосини в перетині Б-Б, на Фіг 12 показаний самохідний мобільний колієукладач з краном-укосиною и експлуатаційному положенні, на Фіг 13 показана конструктивнокомпонувальна схема траверси, на Фіг 14-15 показані варіанти конструктивного розміщення/закріплення на портальній рамі крана-укосини і гідроциліндра повороту крана-укосини, на Фіг 16 показана блок-схема гідросистем управління виконавчими механізмами, на Фіг 17 показана схема утримання в замках траверси головки рельса рейкової ланки, на Фіг 18-19 показана схема підіймання вантажу за допомогою крана-укосини, на фіг 2034 показані етапи підготовки самохідного мобільного колієукладача до зняття рейкової ланки з залізничної платформи та наступного укладання рейкової ланки на земляну полотнину, на Фіг 35 показаний етап роботи самохідного мобільного колієукладача при знятті з залізничної платформи останньої рейкової ланки, на Фіг 36 показаний етап роботи самохідного мобільного колієукладача по підтягуванню пакету рейкових ланок по роликах, встановлених на залізничній платформі, на Фіг 37 показаний етап роботи самохідного мобільного колієукладача по підтягуванню за допомогою тягової лебідки залізничної платформи, яка завантажена рейковими ланками, на Фіг 38 показана схема розміщення самохідного мобільного колієукладача перед зняттям останньої рейкової ланки з платформи, яка оснащена лижами, на Фіг 39-46 показаний етапи підготовки самохідного мобільною колієукладача до зняття рейкової ланки з кузова автомобіля та наступного укладання рейкової ланки на земляну полотнину Самохідний мобільний колієукладач, як варіант конструкційною виконання, містить (див Фіг 18 та Фіг 9-12), портальну раму 1, кран-укосину 2, закріплений на портальній рамі 1, опори 3 портальні рами 1, вантажопідйомний механізм 4, пульт управління 5, джерело живлення 6, гусеничні візки 7 і пристрій 8 для приведення в дію згаданих гусеничних ВІЗКІВ 7 Опори 3 портальної рами 1 закріплені до гусеничних ВІЗКІВ 7 Джерело живлення 6 виконано у вигляді з'єднаних між собою дизеля 9 і генератора 10 Пульт управління 5 виконаний виносним, а до троса 11 вантажопідйомного механізму 4 приєднана траверса 12, причому згадана траверса 12 постачена замками 13 Самохідний мобільний колієукладач додатково містить робоче місце 14 оператора, убудований пульт управління 15, механізм 16 поперечного зсуву вантажу від осі коли з гідромотором 17, другий гідромотор 18 з лебідкою 19, насосну станцію 20, тягову лебідку 21 і гідросистему 22 управління виконавчими механізмами Конструктивно механізм 16 поперечного зсуву вантажу виконаний сполученим з вантажопідйомним механізмом 4 і гідромотором 17 Механізм 16 поперечного зсуву вантажу встановлений на напрямних 23, розміщених усередині портальної рами 1 Опори 3 портальні рами 1 ви 5023 конані у вигляді з'єднаних між собою напрямної 24 і телескопічного елемента 25. Кран-укосина 2 містить поворотну частину 26 і телескопічну стрілу 27. Пристрій 8 для приведення в дію гусеничних візків 7 виконано у вигляді гідроприводу. Тягова лебідка 21 сполучена зі згаданим гідроприводом 8. Механізм 16 поперечного зсуву вантажу від осі колії виконаний з'єднаним з гідромотором 17. Другий гідромотор 18 з лебідкою 19 установлені на поворотній частині 26 крана-укосини 2. Конструктивно до складу гідросистеми 22 управління виконавчими механізмами входять: насосна станція 20, гідропривід 8, гідробак 28 і погоджувальний пристрій 29. Конструктивно згадана гідросистема 22 управління виконавчими механізмами містить дві незалежні гідросистеми, відповідно, першу гідросистему ЗО і другу гідросистему 31. Як виконавчі механізми в гідросистему 22 управління входять: гідроциліндр 32 підйому портальної рами 1, гідравлічні замки 33 стопоріння опор 3 портальної рами 1, гідроциліндр 34 переміщення механізму 16 поперечного зсуву вантажу, гідроциліндр 35 повороту крана-укосини 2 і гідроциліндр 36 висування телескопічної стріли 27 згаданого крана-укосини 2 (див. Фіг. 16). Насосна станція 20 конструктивно з'єднана за допомогою трубопроводів 37 високого тиску зі споживачами. Гідропривід 8 з'єднаний з ведучим катком 38 кожного гусеничного візка 7 і валом тягової лебідки 21. Замки 13 траверси 12 виконані у вигляді двох пар гідравлічних зчеплень, розміщених симетрично траверси 12 (див. Фіг.9 та Фіг.12-13). Кран-укосина 2 закріплений на портальній рамі 1 симетрично її подовжньої осі з можливістю повороту убік кожного з гусеничної візків 7 (див. Фіг.8 та Фіг.14-15). Конструктивно напрямна 24 опори 3 портальні рами 1 установлена вертикально щодо подовжньої осі гусеничного візка 7 і шарнірно закріплена у вузлі кріплення 39 до силової підстави 40 згаданого гусеничного візка 7. Конструктивно корпус гідроциліндра 32 підйому портальної рами 1 закріплений до силової основи 40 гусеничного візка 7, а його шток 41 - до портальної рами 1, корпус гідроциліндра 34 переміщення механізму 16 поперечного зсуву вантажу закріплений до портальної рами 1, а його шток 42 - до корпуса механізму 16 поперечного зсуву вантажу, корпус гідроциліндра 35 повороту крана-укосини 2 закріплений до портальної рами 1 (див. Фіг.8-9 та Фіг.14-15), а його шток 43 - до поворотної частини 26 крана-укосини 2, корпус гідроциліндра 36 висування телескопічної стріли 27 крана-укосини 2 закріплений до вільною кінця поворотної частини 26 крана-укосини 2, а його шток 44 - до телескопічної стріли 27 крана-укосини 2, корпуси гідравлічних замків 33 стопоріння опор З портальні рами 1 закріплені до корпуса гідроциліндра 32 підйому портальної рами 1, а їхні фіксатори 45 - до рухомих елементів 25 опор 3 портальні рами 1. Конструктивно перша гідросистема ЗО забезпечує живлення від насосної станції 20 гідравлічних виконавчих механізмів (по лінії 13, 17, 18, 32, 33, 34, 35, 36), а друга гідросистема забезпечує за допомогою гідроприводу 8 обертання ведучих катків 38 гусеничного візка 7 і вала тягової лебідки 21 (див. Фіг. 16). Конструктивно опори З 10 портальні рами 1 містять не менше двох паралельно розташованих між собою конструктивних елементів (з'єднаних з можливістю телескопічного висування напрямної 24 і рухомого елемента 25). Згадана напрямна 24 опори 3 портальні рами 1 виконана циліндричної чи будь-якої іншої форми, при цьому рухомий елемент 25 опори 3 виконаний аналогічної форми (див. Фіг. 10). Гідроциліндр 32 підйому портальної рами 1 розміщений між опорами 3 портальні рами 1. Кран-укосина 2 конструктивно встановлений з можливістю переміщення своєї поворотної частини 26 у площині портальної рами 1 на кут р до 90° щодо подовжньої осі колієукладача в обидва боки (див. Фіг.8 та Фіг.14-15). Гусеничний візок 7 містить гусеницю 46, напрямні 47, опорні 48 і ведучі 38 катки. Виносний пульт управління 5 з'єднаний з виконавчими механізмами електричним кабелем 49. На вільному кінці троса 11, що намотаний на барабан лебідки 1°, закріплений вантажопідйомний гак 50. Аналогічний гак 50 закріплений на вільному кінці троса 11, що намотаний на барабан тягової лебідки 21. Самохідний мобільний колієукладач, який заявляється, експлуатується таким чином. Попередньо збирається конструкція колієукладача. Для зборки конструкції колієукладача виготовляють відповідні конструктивні елементи, а саме, корпус портальної рами 1, опори 3 портальної рами 1 (напрямні 24 опор 3 з телескопічним елементом 25), траверсу 12, замки 13 для згаданої траверси 12, напрямні 23 для механізму 16 поперечного переміщення вантажу, корпус механізму 16 поперечного переміщення вантажу, силова основа 40 гусеничного візка 7, гусеницю 46 згаданого гусеничного візка 7 (із з'єднаних між собою окремих траків), ведучі катки 38, напрямні катки 47, опорні катки 48, робоче місце 14 оператора і кранукосину 2 (поворотну частину 26 і висувний силовий елемент - стрілу 27). При цьому силову основу 40 гусеничного візка 7 виконують (як варіант конструктивного виконання) у вигляді коробчатої конструкції (для розміщення у внутрішній порожнині джерела живлення 6 і конструктивних елементів гідросистеми 22 управління виконавчими механізмами) (див. Фіг.1). З промислового устаткування (для розміщення на колієукладачі) здобувають: дизель 9, генератор 10 струму, пристрій 8 для приведення в дію ведучого катка 38 гусеничного візка 7 (гідропривід), гідромотори 17 і 18, гідробак 28, насосну станцію 20, вантажопідйомний механізм 4, тягову лебідку 21, лебідку 19 з вантажопідйомним гаком 50, стаціонарний 15 і виносний 5 пульти управління, електропроводи і кабелі 49, трубопроводи 37 високого тиску (гнучкі і металеві), погоджувальний пристрій 29 і виконавчі механізми (гідроциліндри - позиції 32, 34, 35, 36, і гідравлічні замки 33 стопоріння опор 3 портальні рами 1). Як необхідне допоміжне устаткування виготовляють: кронштейни і вузли кріплення 39. Після того, як усі конструктивні елементи самохідного мобільного колієукладача будуть виготовлені і підготовлені до зборки, починають збирати конструкцію самохідного мобільного колієукладача. Як варіант конструктивного виконання, у пер 11 5023 12 шу чергу збирають гусеничні візки 7 Для цього до укосини 2 закріплюють вузол кріплення 39, а до силової основи 40 закріплюють ведучі катки 38, нього - корпус гідроциліндра 36 висування стріли напрямні катки 47 і опорні катки 48 3 ведучим кат27 Шток 44 згаданого гідроциліндра 36 ком 38 з'єднують пристрій 8 для приведення в дію закріплюють у відповідному вузлі кріплення 39, що ведучого катка 38 гусеничного візка 7 (пдропризакріплений у районі вільного кінця стріли 27 (див вщ) Далі до силової основи 40 закріплюють вузли Фіг 9, Фіг 12, Фіг 19) Також на поворотній частині кріплення 39, у які встановлюють (див Фіг 1-2) 26 крана-укосини 2 установлюють лебідку 19 і напрямні 24 опор 3 портальні рами 1 і корпус гідзв'язаний з нею гідромотор 18 (див Фіг 9, Фіг 12, роциліндра 32 підйому портальної рами 1 При Фіг 19) До вільного кінця троса 11 (який цьому гідроциліндр 32 підйому портальної рами 1 і намотаний на лебідку 19) приєднують опори 3 портальні рами 1 встановлюють у зібравантажопідйомний гак 50 (див Фіг 9, Фіг 12, Фіг 19, ному виді Фіг 32 та Фіг 36) Після ТОГО, ЯК портальна рама 1 зібрана, її (раОдночасно з вищевказаним, у внутрішню позом із приєднаним краном-укосиною 2) жорстко рожнину силової основи 40 установлюють джерезакріплюють до вільних КІНЦІВ телескопічних елело живлення 6 (дизель 9 і з'єднаний з ним генераментів 25 опор 3 портальні рами 1 і до штоків 41 тор 10 струму) і елементи, що входять до складу гідроциліндрів 32 підйому портальної рами 1 При гідросистеми 22 управління виконавчими механізцьому телескопічні елементи 25 опор 3 портальної мами На ЗОВНІШНІЙ поверхні силової основи 40 (у рами 1 і штоки 41 гідроциліндрів 32 підйому поррайоні робочого місця 14 оператора) установлютальної рами 1 можуть знаходитися або в прибрають стаціонарний пульт управління 15 і приєднуному положенні (див Фіг 2, Фіг 5, Фіг 7, Фіг 20, ють за допомогою електричного кабелю 49 виносФіг 36-37 та Фіг 39), або у висунутому положенні ний пульт управління 5 (див Фіг 1-8) (див Фіг 1, ФігЗ-4, Фігб, Фіг 18, Фіг21-35) Кранукосина 2 може знаходитися або в положенні, коли До корпуса гідроциліндра 32 підйому портальповоротна частина 26 розташована по подовжній ної рами 1 приєднують корпуси гідравлічних замків осі портальної рами 1 (з висунутим чи прибраним 33 стопоріння опор 3 портальні рами 1, а фіксатосиловим елементом - стрілою 27), або в положенри 45 згаданих гідравлічних замків 33 - до рухомоні, коли поворотна частина 26 спрямована убік го (телескопічного) елемента 25 опори 3 портальгусеничного візка 7 (у той чи інший бік щодо поної рами 1 довжньої осі портальної рами 1 (як з висунутим, Після виконання вищевказаних технологічних так і з прибраним силовим елементом - стрілою операцій по зборці нижньої частини самохідного 27), або в будь-якому іншому проміжному поломобільного колієукладача, починають збирати женні в секторі повороту до 90 е щодо подовжньої портальну раму 1 Для цього виготовляють корпус осі портальної рами 1 (як з висунутим, так і з припортальної рами 1 у вигляді коробчатої конструкбраним силовим елементом - стрілою 27) (див ції Після ЦЬОГО у середину корпуса портальної Фіг 1, Фіг 8-9, Фіг 12 та Фіг 14-15) рами 1 установлюють напрямні 23, а на них - корпус механізму 16 поперечного зсуву вантажу від Генератор 10 струму з'єднують зі споживачами осі коли (з розміщеними в корпусі згаданого мехаі з пультами управління (позиції 5 і 15) за допомонізму 16 вантажопідйомного механізму 4 і гідромогою електричних проводів і кабелів 49 Гідросистори 17) До торцевої стінки (позиція 51) внутрітему 22 управління виконавчими механізмами шньої порожнини корпуса портальної рами 1 з'єднують з виконавчими гідроциліндрами (позиції закріплюють (у вузлі кріплення 39) корпус гідроци32, 34, 35 і 36), гідравлічними замками 33 стополіндра 34 переміщення механізму 16 поперечного ріння опор 3 портальні рами 1, замками 13 траверзсуву вантажу від осі коли, а шток 42 згаданого си 12, пристроєм 8 для приведення в дію ведучого гідроциліндра 34 - до торцевої стінки (позиція 52) катка 38 гусеничного візка 7 (пдроприводом), гідкорпуса механізму 16 До троса 11 вантажопідйоромоторами 17 і 18 за допомогою гідравлічних много механізму 4 приєднують траверсу 12 з розшлангів і трубопроводів (позиція 37) високого тисміщеними в ній замками 13 ку Далі на корпусі портальної рами 1 закріплюють Підготовлений таким чином самохідний мобівузол кріплення 39, у який установлюють (з можльний колієукладач готовий до роботи ливістю повороту в горизонтальній площині і плоСамохідний мобільний колієукладач експлуащині портальної рами 1) поворотну частину 26 тується наступним чином крана-укосини 2 (з розміщеною усередині згаданої Оператор сідає на своє робоче місце 14 і, за поворотної частини 26 телескопічної конструкції допомогою стаціонарного пульта управління 15 (чи стріли 27) Конструктивно до поворотної частини виносного пульта управління 5), запускає дизель 9 26 крана-укосини 2 закріплюють вузол кріплення самохідного мобільного колієукладача Дизель 9, 39, а до нього - шток 43 гідроциліндра 35 повороту що зв'язаний з генератором 10 струму, забезпечує крана-укосини 2 Корпус гідроциліндра 35 поворообертання ротора генератора 10 і вироблення ту крана-укосини 2 конструктивно закріплюють у останнім електричного струму для живлення сповузлі кріплення 39, що розміщують, як варіант живачів Також відбувається і запуск насосної стаконструктивного виконання, або на внутрішній часнції 20, що розміщена, як варіант конструктивного тині торцевої стінки (позиція 53) корпуса портальвиконання, у силовій основі 40 гусеничного візка 7 ної рами 1 (див Фіг 1-2 та Фіг 8), або на ЗОВНІШНІЙ Тим самим перевіряється в холосту робота всіх торцевій поверхні корпуса портальної рами 1 (див механізмів Фіг 14 або Фіг 15) Конструктивно на поворотній У випадку, коли телескопічні елементи 25 опор частині 26 крана-укосини 2 закріплюють вузол кріЗ портальні рами 1 і штоки 41 гідроциліндрів 32 17 5023 18 ється (чи убирається) шток 42 згаданого гідроциліповторюється до моменту, коли всі рейкові ланки ндра 34 За допомогою штока 42 гідроциліндра 34 55 із крайньої платформи 56 будуть зняті і корпус механізму 16 поперечного зсуву вантажу покладені на земляну полотнину 54 (коли весь буде переміщатися по напрямним 23 у той чи інзчеп буде пустим) ший бік (у залежності від місця укладання передВ другому випадку (після укладання останньої ньої частини рейкової ланки 55 на земляну полотв пакеті рейкової ланки 55, що знаходилась на нину 54) При досягненні потрібного положення черговій платформі 56, на земельну полотнину 54) траверси 12 (із закріпленою у ній за допомогою оператор здійснює випуск троса 11 вантажної лезамків 13 рейковою ланкою 55) відносно земельної бідки 21 (з гаком 50) і зачіп згаданого гака 50 ванполотнини 54, переміщення штока 42 гідроциліндтажної лебідки 21 до рейкової ланки 55 пакета, ра 34 припиняється Далі оператор видає чергову який знаходиться на наступній платформі 56 За керуючу команду на гідромотор 17 і лебідку допомогою тягової лебідки 21 перетягається по вантажопідйомного механізму 4 Починає роликах 57 (чи по лижах 58) черговий пакет рейкопрацювати гідромотор 17 і розкручувати барабан вих ланок 55 по черзі на платформи 56, що звільлебідки механізму 16 поперечного зсуву вантажу нилися (платформа 56 повинна бути обладнана на випуск троса 11 із закріпленою на його вільному роликами 57 чи лижами 58) і, як наслідок, на крайКІНЦІ траверсою 12 Траверса 12 опускається і ню платформу 56 (див Фіг 36) 3 цієї платформи разом з нею опускається і рейкова ланка 55 (її 56 робиться укладання рейкових ланок 55 на земпередня частина) ляну полотнину 54 за вищевказаною методикою Після ТОГО, ЯК буде покладена остання з перетягнених на крайню платформу 56 рейкових ланок 55, Коли буде закінчений процес рихтування рейоператор робить черговий випуск троса 11 з тягокової ланки 55 відносно подовжньої осі земляної вої лебідки 21 (використовуючи пдропривід 8 для полотнини 54 і передня частина рейкової ланки 55 обертання барабана тягової лебідки 21) Випущебуде покладена на поверхню земляної полотнини ний на необхідну довжину трос 11 оператор за 54, оператор за допомогою пульта управління (подопомогою вантажопідйомного гака 50 закріплює зицГі 5 чи 15) подає команду на розчеплення замдо чергового пакета рейкових ланок 55, який знаків 13 траверси 12 Замки 13 відкриваються і звіходиться на нерозвантаженій платформі 56 Далі льняють головку рейки 60 (див Фіг 33) Коли рейка оператор за допомогою пульта управління (пози60 рейкової ланки 55 буде звільнена, оператор ція 5 чи 15) видає команду на пдропривід 8, який видає за допомогою пульта управління (позиція 5 відпрацьовує цю команду і здійснює обертання чи 15) керуючий сигнал на гідромотор 17, що розбарабана тягової лебідки 21 у зворотний бік (на ташований у корпусі механізму 16 поперечного намотування троса 11 на барабан згаданої тягової зсуву вантажу від осі коли Гідромотор 17 включалебідки 21) Шляхом змотування троса 11 здійсється в роботу і приводить в обертання вантажонюється перетягання пакета рейкових ланок 55, підйомний механізм 4 При обертанні лебідки ванякий знаходиться на нерозвантаженій платформі тажопідйомного механізму 4 почне змотуватися 56, на порожню (крайню в ЗЧІПЦІ) платформу 56 трос 11 і підніматися траверсу 12 із замками 13 (див Фіг 38), при цьому, як уже було зазначено (див Фіг 34) Процес підняття траверси 12 відбувище, переміщення пакета рейкових ланок 55 по вається до максимального підняття щодо нижньої порожніх платформах 56 відбувається по роликах поверхні корпуса портальної рами 1 Процес повторюється до моменту, коли всі 57 чи лижах 58 (див Фіг 38 та Фіг 36-37) Після рейкові ланки 55 із крайньої платформи 56 будуть того, як пакет рейкових ланок 55 виявиться на зняті і покладені на земляну полотнину 54 (див крайній платформі 56, оператор відключає гідроФіг 38 та Фіг 35) мотор 8, при цьому змотування троса 11 припиняється Трос 11 (з гаком 50) ВІДЧІПЛЮЄТЬСЯ ВІД рейПісля ЦЬОГО МОЖЛИВІ два варіанти використанкової ланки 55, за яку тягли весь пакет рейкових ня самохідного мобільною колієукладача ланок 55 Після відчеплення троса 11 (з гаком 50) У першому випадку колієукладач буде пересуоператор опускає траверсу 12 із замками 13 і роватися по земляній полотнині 54 над порожньою бить захоплення замками 13 головки рейки 60 платформою 56 (яка в ЗЧІПЦІ знаходиться крайрейкової ланки 55 (див Фіг 25) ньою) убік платформи 56 з покладеними на неї рейковими ланками 55 Після того, як колієукладач Операції по підніманню з платформи 56 рейбуде знаходитись над платформою 56 з покладекової ланки 55 і її укладання на земляну полотнину ними на неї рейковими ланками 55, оператор за 54 повторюються за вищеописаною технологією допомогою пульта управління (позиція 5 чи 15) до повного зняття рейкових ланок 55 з чергової і зупиняє пдропривід 8 і, як наслідок, гусеничні візки наступної платформ 56 7 (див Фіг 23-24) Потім за допомогою пульта Коли всі рейкові ланки 55 із усіх платформ 56 управління (позиція 5 чи 15) оператор опускає будуть покладені на земляну полотнину 54, поротраверсу 12 із замками 13 і робить захоплення жні платформи 56 від'їжджають, а на їхнє місце замками 13 головки рейки 60 рейкової ланки 55 подаються нові платформи 56 з покладеними на (див Фіг 25) них рейковими ланками 55 Операції по підніманню з платформи 56 рейУ випадку використання спеціального автомокової ланки 55 і її укладання на земляну полотнину біля 62, що обладнаний кузовом 63 для переве54 повторюються за вищеописаною технологією зення рейкових ланок 55, процес укладання рейдо повного зняття рейкових ланок 55 з чергової і кових ланок 55 здійснюється таким чином наступної платформ 56 (див Фіг 35) Самохідний мобільний колієукладач під'їжджає Процес укладання рейкових ланок 55 повтодо кінця рейкової ланки 55, що покладена на зем 19 5023 20 земляну полотнину 54 (див. Фіг.39-40 та Фіг.41). 37 гідравлічну рідину з гідробака 28 у робочі Спеціальний автомобіль 62 (з пакетом рейкопорожнини гідроциліндра 36 висування вих ланок 55 у кузові 63) подається заднім ходом телескопічної стріли 27 з корпуса поворотної до самохідного мобільного колієукладача і під'їжчастини 26 крана-укосини 2 (див. Фіг. 12 та Фіг. 18). джає під портальну раму 1 (див. Фіг.41). Під час При цьому автоматично розмотується трос 11 під'їзду автомобіля 62 траверса 12 повинна знахолебідки 19, що закріплена на поворотній частині 26 дитись на максимально можливій висоті відносно крана-укосини 2. Після висування на максимальну земляної полотнини 54 (див. Фіг.43). Під порталь(чи на необхідну величину) стріли 27 з корпуса ною рамою 1 спеціальний автомобіль 62 зупиняповоротної частини 26 крана-укосини 2, вклюється, а оператор за допомогою убудованого (почається другий гідромотор 18 і здійснюється зиція 15) чи виносного (позиція 5) пульта подальший випуск троса 11 (із закріпленим на віуправління випускає трос 11 вантажопідйомного льному кінці троса 11 вантажопідйомним гаком 50) механізму 4 (опускає траверсу 12 із замками 13). з кінцевої частини стріли 27 крана-укосини 2. Після Після випуску троса 11 вантажопідйомного механізакріплення вантажу 64 на гаку 50 (див. Фіг.4 та зму 4 оператор здійснює накладання замків 13 Фіг. 19), кран-укосина 2 за допомогою гідроциліндтраверси 12 на головки рейок 60 і видає команду ра 35 повертається у вузлі кріплення 39 у площині на захоплення замками 13 згаданих головок рейки портальної рами 1 у необхідному напрямку з на60 (див. Фіг.17) верхньої рейкової ланки 55 блоку, ступним опусканням вантажу 64 (див. Фіг. 19). який покладений у кузові 63. Після того, як верхня рейкова ланка 55 буде захоплена замками 13 траПри переході мобільного самохідного колієукверси 12, оператор робить підйом зазначеної верладача в транспортувальне положення, кранхньої рейкової ланки 55 (див. Фіг.45) з наступним укосина 2 за допомогою гідроциліндра 35 притисукладанням її на земляну полотнину 54 (по зазнакається (практично) до зовнішньої стінки портальченій вище технології) (див. Фіг.46). ної рами 1, а стріла 27 убирається за допомогою гідроциліндра 36 усередину поворотної частини Після того, як згадана рейкова ланка 55 буде 26, при цьому за допомогою гідромотора 18 відбупокладена і скріплена з попередньою рейковою вається обертання лебідки 19 у зворотний бік і ланкою 55 (за допомогою накладок 61), можливі змотування троса 11 (із закріпленим на вільному два варіанти роботи мобільного самохідного колієкінці троса 11 вантажопідйомним гаком 50) на баукладача: рабан згаданої лебідки 19. За допомогою гідромо- переміщення колієукладача назад відносно тора 17 роблять змотування на барабан вантажонерухомо стоячого автомобіля 62; підйомного механізму 4 троса 11 і, як наслідок, - поетапна подача автомобіля 62 під колієукпідйом траверси 12 із замками 13 до нижньої поладач після кожної покладеної на земляну полотверхні портальної рами 1. Далі роблять розфіксанину 54 рейкової ланки, коли колієукладач цію фіксаторів 45 замків 33 і наступне прибирання зупиняється або над тільки що покладеною рейкоштока 41 гідроциліндра 32 у його корпус, при цьовою ланкою 55, чи переїжджає за допомогою гусему будуть убиратися усередину напрямних 24 теничних візків 7 на порожню частину земляної полескопічні елементи 25, а портальна рама 1 - опулотнини 54. У цьому випадку здійснюється скатися. переміщення автомобіля 62 з рейковими ланками 55 уперед на довжину покладеної рейкової ланки Після виконання вищевказаних технологічних 55. операцій оператор займає своє місце на робочому місці 14, за допомогою пульта управління (позиції При цьому всі операції по підняттю за допомо5 чи 15) запускає насосну станцію 20, дизель 9 з гою траверси 12 рейкової ланки 55, її укладання на генератором 10, і подає по трубопроводах 37 тиск земляну полотнину 54 з наступним рихтуванням гідравлічної рідини з гідробака 28 у гідропривід 8. рейкової ланки 55 відносно подовжньої осі земляГідропривід 8 почне обертати ведучі катки 38 гусеної полотнини 54 робляться аналогічно вищевканичного візка 7, за допомогою яких будуть перемозаному. туватися гусениці 46 і переміщатися мобільний У випадку, коли необхідно перемістити вантаж самохідний колієукладач до нового місця роботи. 64, що знаходиться або на земляній полотнині 54, На новому місці роботи технологічні операції по або праворуч чи ліворуч по обох боках від гусенипереведенню самохідного мобільного колієуклачних візків 7, оператор за допомогою одного з дача з транспортувального положення в робоче пультів управління (позиція 5 чи 15) подає команду повторюються відповідно до викладеного вище. на насосну станцію 20. Насосна станція 20 за допомогою нагнітаючого елемента, наприклад, насоПідвищення ефективності використання самосу, перекачує під тиском по трубопроводах 37 гідхідного мобільною колієукладача, у порівнянні з равлічну рідину з гідробака 28 у робочі порожнини прототипом, досягається за рахунок зміни констругідроциліндрів 35 і 36 (див. Фіг.З). Під тиском гідкції, за рахунок зміни габаритів при переведенні з равлічної рідини випускається шток 43 гідроцилінтранспортного у робоче положення, застосування дра 35 повороту крана-укосини 2 і поворотна часвбудованих джерел енергопостачання, можливості тина 26 крана-укосини 2 повертається у вузлі приведення колієукладача в робочий стан у в вісім кріплення 39 у необхідне положення (див. Фіг.8 та разів швидше, можливості виконанні рихтовки рейФіг.9). Далі оператор за допомогою пульта управкової ланки при укладанні її на земляну полотнину, ління (позиція 5 чи 15) видає команду на насосну можливості транспортування колієукладача при станцію 20 і згадана насосна станція 20 за допомінімальному розбиранні повітряним, річковим могою нагнітаючого елемента перекачує під тис(морським) і будь-яким наземним транспортом. ком по трубопроводах 37 гідравлічну рідину з гід «МФ /////////////Ш//////////////////////Ж 0£ «5 ЇЗ ФІГ.» 13 5023 14 зиція 5 чи 15) подає командний сигнал на замки підйому портальної рами 1 знаходяться в прибра13 За допомогою замків 13 відбувається захопному (див Фіг 2, Фіг 20 та Фіг 39) положенні, опелення рейкової ланки 55 за головку рейки 60 (див ратор за допомогою пульта управління, наприФіг 25) Після НЬОГО рейкова ланка 55 піднімається клад, стаціонарного пульта управління 15 подає за допомогою траверси 12 (див Фіг 26-27 т а команду на насосну станцію 20 гідросистеми 22 Фіг 17) Насосна станція 20 відпрацьовує команду і по трубопроводах 37 подає гідравлічну рідину з пдробаДалі самохідний мобільний колієукладач з підка 28 у робочі порожнини корпуса гідроциліндра 32 нятою рейковою ланкою 55 переміщується (за д о підйому портальної рами 1 через погоджувальний помогою гусеничних ВІЗКІВ 7) у протилежний від пристрій 29 (для забезпечення однакової величиплатформи 56 з рейковими ланками 55 бік (уздовж ни випуску штоків 41 обох гідроциліндрів 32) Після земляної полотнини 54) (див Фіг 28) При цьому, того, як штоки 41 згаданих гідроциліндрів 32 підвикористовуючи гусеничний візок 7, самохідний йому портальної рами 1 будуть висунуті на максимобільний колієукладач з піднятою рейковою л а н мальну величину (L) (див Фіг 1), гідравлічна рідикою 55 перемішається вперед на відстань що пена від насосної станції 20 подається в робочі ревищує довжину рейкової ланки 55, яка укладапорожнини гідравлічних замків 33 стопоріння опор ється, приблизно на 0,5м (див Фіг 29) З портальної рами 1 При цьому будуть висуватися Після зупинки самохідного мобільного колієукфіксатори 45 згаданих гідравлічних замків 33 і ладача рейкова ланка 55 із траверсою 12 опускафіксувати у висунутому положенні телескопічні ється за допомогою розмотування троса 11. що елементи 25 опор 3 портальної рами 1 Краннамотаний на вантажопідйомний механізм 4 (див укосина 2 знаходиться при цьому в одному з Фіг 31) При цьому траверса 12 із замками 13 і з вищевказаних робочих чи транспортувальних позатиснутою у них (за головку рейки 60) рейковою ложеннях (див , ВІДПОВІДНО, Фіг 4 чи Фіг 1-2), а траланкою 55 (див Фіг 17) опускається до контакту верса 12 із замками 1 3 - у піднятому до нижньої задньою частиною рейкової ланки 55 земляної поверхні корпуса портальної рами 1 положенні полотнини 54 (див Фіг ЗО та Фіг 32) Після того, як(див Фіг 24) рейкова ланка 55 своєю задньою частиною буде опущена на земляну полотнину 54, згадану рейкову ланку 55 стикують за допомогою накладок 61 із Далі оператор за допомогою одного з пультів вже покладеною рейковою ланкою 55 (див Фіг ЗО управління (позиція 5 ЧИ 15) запускає пристрій 8 та Фіг 32) При цьому передня частина рейкової для приведення в дію ведучого катка 38 гусеничланки 55 буде знаходитися в піднятому положенні ного візка 7 (пдропривщ) Пдропривід 8 почне обе(за допомогою траверси 12) (див Фіг ЗО та Фіг 32) ртати ведучий каток 38 гусеничного візка 7 і наКоли процес стикування рейкових ланок 5 5 буде дасть руху гусениці 46 При перемотуванні закінчений, за допомогою траверси 12 (шляхом її гусениці 46 гусеничний візок 7 буде переміщати опускання за допомогою вантажопідйомного мехаконструкцію самохідного мобільного колієукладанізму 4) передня частина рейкової ланки 5 5 опусча, при цьому опора гусениці 46 здійснюється за кається У процесі опускання передньої частини допомогою катків 47 і 48 (див Фіг 1-2) згаданої рейкової ланки 55 здійснюється й рихтуПереміщаючись за допомогою гусеничних ВІЗвання уздовж осі земляної полотнини 54 а б о вручКІВ 7, самохідний мобільний колієукладач заїжджає ну, або за допомогою механізму 16 поперечного на підготовлену земляну полотнину (позиція 54) і зсуву вантажу, закріпленого на портальній рамі 1 приводиться в робоче положення, при якому поПри цьому оператор за допомогою пульта управдовжня вісь портальної рами 1 і гусеничних ВІЗКІВ 7 ління (позиції 5 чи 15) подає керуючий сигнал на спрямована уздовж ділянки земляної полотнини насосну станцію 20 3 насосної станції 2 0 гідравлі(позиція 54) (див Фіг 21-22) чна рідина під тиском подається по трубопроводах Поки самохідний мобільний колієукладач готу37 гідросистеми 22 у відповідну порожнину корпується до роботи, на ланкоскладальній базі рейкові са гідроциліндра 34 переміщення механізму 16 ланки 55 вантажаться на платформи 56, що облапоперечного зсуву вантажу, при цьому висуваєтьднані роликами 57 і лижами 58 (див Фіг 24, Фіг 35ся (чи убирається) шток 42 згаданого гідроцилінд36 та Фіг 37-38) (чи на звичайні чотиривісні залізра 34 У свою чергу корпус механізму 16 поперечничні платформи 56) (див Фіг 22-23) Сформованого зсуву вантажу переміщується по напрямним ний потяг (зчепи з ланками) подається до самохід23 у той чи інший бік (у залежності від м і с м я укланого мобільного колієукладача локомотивом дання рейкової ланки 55 щодо осі земляно"! полот(позиція 59) (див Фіг 22-23) нини 54) (див Фіг 32) При досягненні потрібного Далі платформи 56 - зчепи з ланками (з розположення траверси 12 з рейковою л а м к о ю 55 міщеними на них рейковими ланками 55) подаютьвідносно земельної полотнини 54, переі^'Щеччя ся під портальну раму 1 колієукладача (див штока 42 гідроциліндра 34 п р и п и н я є т ь с я Далі Фіг 22-23 та Фіг 24-26) оператор видає чергову керуючу к о м а н д У н а гідВикористовуючи пульт управління (позиція 5 ромотор 17 і лебідку вантажопідйомного ІЧ/І еханізм^ чи 15) оператор запускає в хід вантажопідйомний 4 Починає працювати гідромотор 17 і р о з к р у ч у в а механізм 4 Обертаючись вантажопідйомний мети барабан лебідки вантажопідйомного іч/іеханізмі ханізм 4 розмотує трос 11 із приєднаною до його 4 на випуск троса 11 із закріпленою на й о г о віль вільного кінця траверсою 12 із замками 13 (див ному КІНЦІ траверсою 12 Траверса 12 о п у с к а є т ь с Фіг 24-25) Траверса 12 із замками 13 опускається і разом з нею опускається рейкова ланка ^ 5 (ґі пє убік платформи 56 з рейковими ланками 55 (див редня частина) (див Фіг 31) Фіг 25) При контакті замків 13 з головкою рейки Коли буде закінчений процес рихтувеь пня реї 60, оператор за допомогою пульта управління (по / V,'///.У/У,.',. У'У/У///У
ДивитисяДодаткова інформація
Назва патенту англійськоюSelf-propelled mobile tracklayer
Автори англійськоюMalkov Mykola Ivanovych, Sendetskyi Mykola Mykolaovych, Stepanenko Oleksandr Oleksiiovych, Ubaidullaiev Yusufzhon Nurulaiovych, Zhukovskyi Serhii Mykhailovych, Zaikivskyi Oleksandr Boleslavovych
Назва патенту російськоюСамоходный мобильный путеукладчик
Автори російськоюМальков НиколаЙ Иванович, Сендецкий Николай Николаевич, Степаненко Александр Алексеевич, Убайдуллаев Юсуфжон Нурулаевич, Жуковский Сергей Михайлович, Зайкивский Александр Болеславович
МПК / Мітки
МПК: E01B 29/00, B60S 13/00
Мітки: мобільній, самохідний, колієукладач
Код посилання
<a href="https://ua.patents.su/40-5023-samokhidnijj-mobilnijj-koliehukladach.html" target="_blank" rel="follow" title="База патентів України">Самохідний мобільний колієукладач</a>
Мобільний самохідний міномет
Номер патенту: 24658
Опубліковано: 04.08.1998
Автори: Тісновський Леонід Рахмилович, Баранчук Олександр Іванович, Павленко Анатолій Володимирович, Чалий Всеволод Олександрович, Бондаренко Леонід Іванович
МПК: F41F 1/00, B62D 61/00
Мітки: мобільній, міномет, самохідний
Формула / Реферат:
1. Мобильный самоходный миномет, содержащий транспортное средство, снабженное корпусом, разделенным на моторно-трансмиссионное отделение и боевое отделение, минометом, закрепленным к полу боевого отделения, и движителем, при этом движитель расположен по бокам корпуса, отличающийся тем, что моторно-трансмиссионное отделение и боевое отделение размещены параллельно друг другу, а миномет расположен вне боевого отделения, закреплен на кулисном...
Самохідний транспортний засіб

Номер патенту: 69611
Опубліковано: 15.09.2004
Автор: Дорожко Олександр Іванович
МПК: B62D 63/00
Мітки: засіб, самохідний, транспортний
Формула / Реферат:
Самохідний транспортний засіб, який містить раму, ходові мотор-колеса та систему управління мотор-колесами, який відрізняється тим, що на рамі закріплені в фіксованому напрямку мотор-колеса, які розташовані між собою під кутом відносно вертикальних площин суміжних коліс, кожне з яких складається з несучих дисків, по периметру яких розташовані порівну і рівномірно симетрично зрізані n роликів з радіусом овалів в площині осі обертання ролика,...
Самохідний тягово-транспортний засіб
Номер патенту: 42107
Опубліковано: 15.10.2001
Автори: Луб'яний Микола Миколаєвич, Карташов Сергій Григорович, Мартиненко Микола Іванович, Ілляшенко Володимир Іванович, Байбіков Володимир Юрійович
МПК: B62D 7/06
Мітки: тягово-транспортний, засіб, самохідний
Формула / Реферат:
1. Самохідний тягово-транспортний засіб, що має раму, на якій встановлені двигун та трансмісія, передні та задні мости з колесами і бортові редуктори, який відрізняється тим, що бортові редуктори виконані одноступінчастими та коливально-рухомими відносно осі підвісу, а одна із точок підвісу виконана у вигляді керованого гідроциліндру.2. Самохідний тягово-транспортний засіб за п. 1, який відрізняється тим, що рама з'єднана з...
Самохідний зернозбиральний комбайн
Номер патенту: 71927
Опубліковано: 17.01.2005
Автор: Шверсманн Бертольд
МПК: A01F 12/10
Мітки: зернозбиральний, самохідний, комбайн
Формула / Реферат:
1. Самохідний зернозбиральний комбайн з ходовою частиною, рамою, робочими органами для приймання, транспортування і вивантаження збираної маси, а також пристроями для приведення робочих органів, причому робочі органи включають щонайменше один працюючий за принципом тангенціального потоку молотильний або передаючий збирану масу барабан і два встановлених за ним працюючих за принципом осьового потоку розділюючих збирану масу, ротори, які...
Мобільний авіаційний тренажер
Номер патенту: 55318
Опубліковано: 17.03.2003
Автори: Давидов Олександр Рубенович, Сотников Дмитро Олексійович, Потемський Віталій Миколайович, Харченко Володимир Петрович, Бабак Віталій Павлович
МПК: G09B 9/02
Мітки: тренажер, мобільній, авіаційний
Формула / Реферат:
1. Мобільний авіаційний тренажер, який містить макет кабіни на базовій площадці та імітатори систем об'єкта, який відрізняється тим, що між макетом кабіни і базовою площадкою встановлені послідовно з'єднані жорстка рама з вузлами кріплення і транспортування і силовий каркас із шарнірними опорами.2. Мобільний авіаційний тренажер за п. 1, який відрізняється тим, що жорстка рама виконана у вигляді квадрата з подовжнього і поперечного...
Попередній патент: Спосіб дресирування собаки
Наступний патент: Шпонка
Випадковий патент: Ефективний по енергетичних і вагових показниках стінний блок, спосіб виробництва і застосування стінного блока