Пристрій для вимірювання кутового руху літального апарата
Номер патенту: 106476
Опубліковано: 10.09.2014
Автори: Дронь Микола Михайлович, Хорольський Петро Георгійович
Формула / Реферат
Пристрій для вимірювання кутового руху літального апарата, відносно набігаючого потоку, що містить покажчик потоку у вигляді флюгерної аеродинамічної поверхні, встановленої на апараті за допомогою осі обертання, та встановлений на покажчику датчик кутової швидкості, який відрізняється тим, що в нього додатково введені n інтеграторів, де n≥0, послідовно з'єднаних між собою, вхід першого із них з'єднаний з виходом датчика кутової швидкості, а вісь чутливості датчика орієнтована некомпланарно, наприклад перпендикулярно, площині, паралельній осі обертання і дотичній до перетину флюгерної аеродинамічної поверхні площиною, перпендикулярною цій осі.
Текст
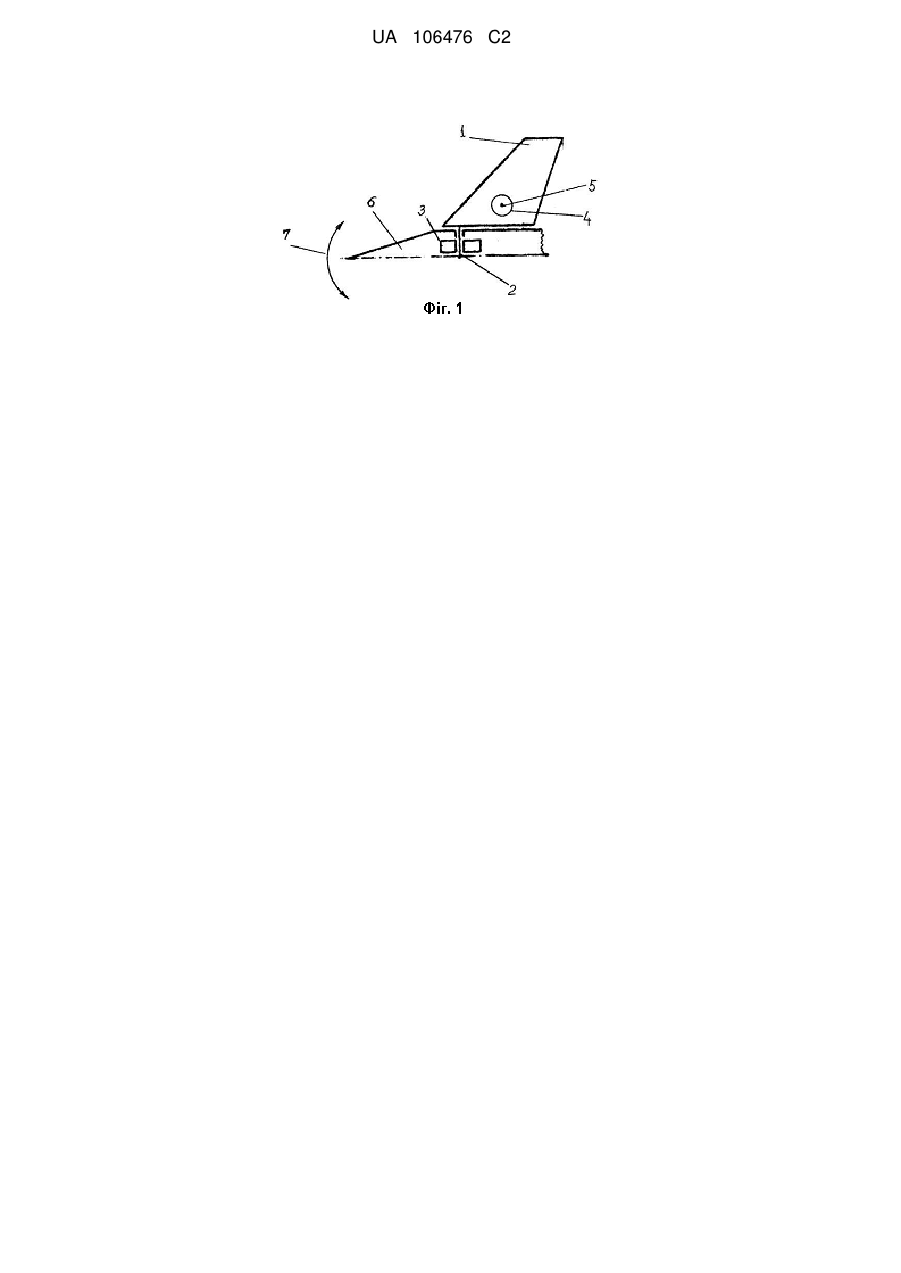
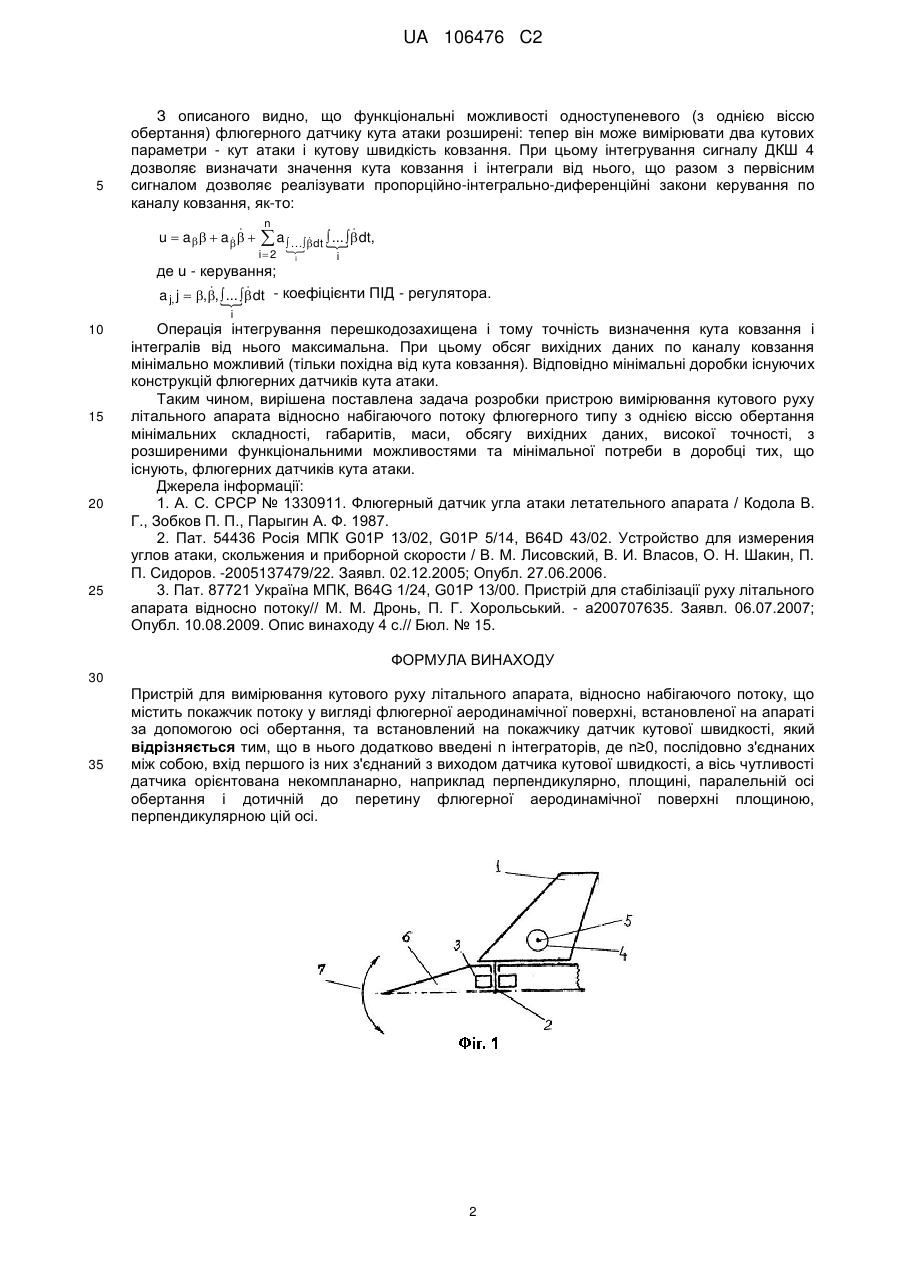
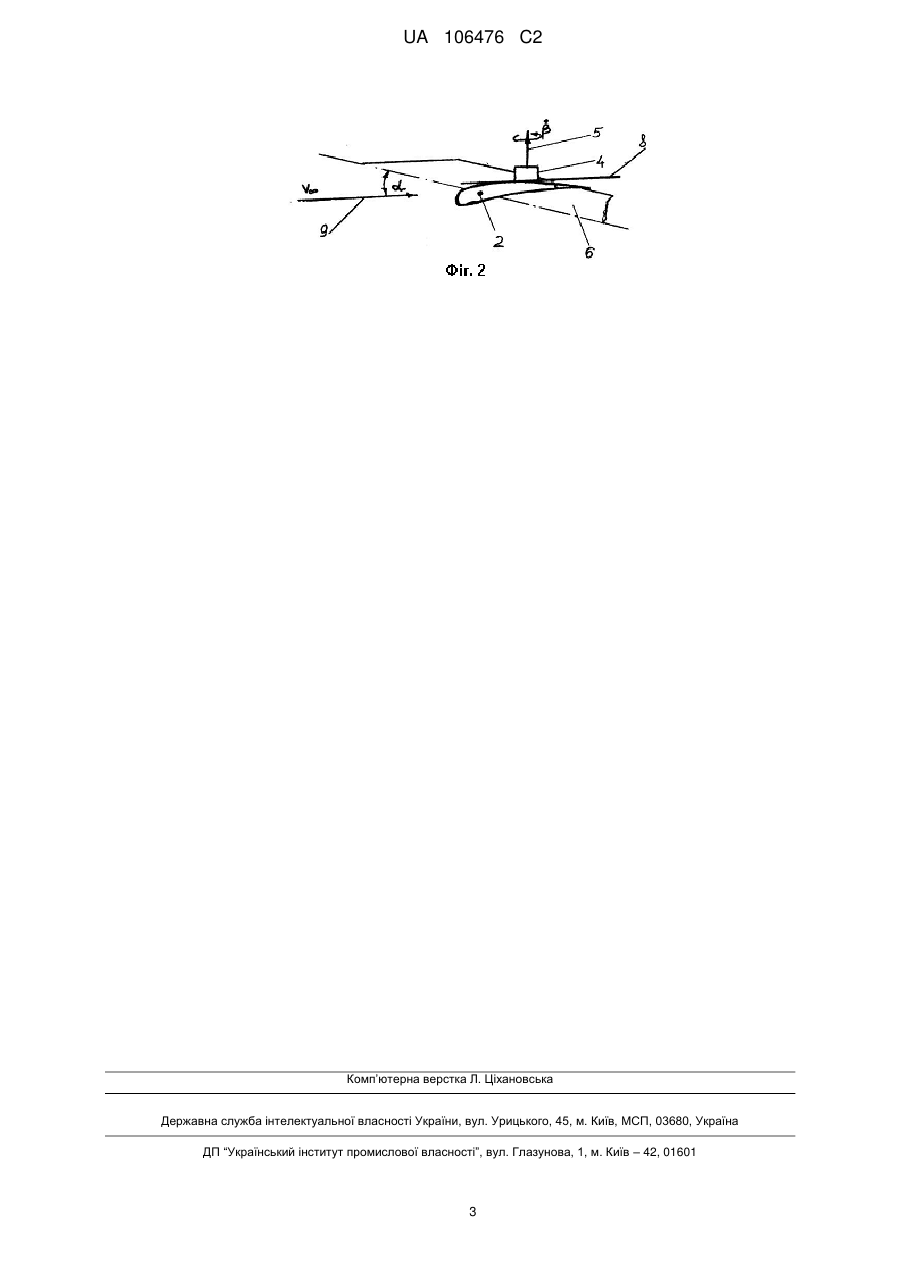
Реферат: Винахід належить до аерокосмічної техніки, конкретно - до керування літальними апаратами на атмосферній ділянці траєкторії польоту. Пристрій для вимірювання кутового руху літального апарата, відносно набігаючого потоку, містить покажчик потоку у вигляді флюгерної аеродинамічної поверхні, встановленої на апараті за допомогою осі обертання, та встановлений на покажчику датчик кутової швидкості. Для розробки пристрою вимірювання кутового руху літального апарата відносно набігаючого потоку флюгерного типу з однією віссю обертання мінімальних складності, габаритів, маси, обсягу вихідних даних, високої точності, з розширеними функціональними можливостями та мінімальної потреби в доробці тих, що існують, флюгерних датчиків кута атаки в пристрій додатково введені n інтеграторів, де n≥0, послідовно з'єднаних між собою, вхід першого із них з'єднаний з виходом датчика кутової швидкості. Вісь чутливості датчика орієнтована некомпланарно, наприклад перпендикулярно, площині, паралельній осі обертання і дотичній до перетину флюгерної аеродинамічної поверхні площиною, перпендикулярною цій осі. UA 106476 C2 (12) UA 106476 C2 UA 106476 C2 5 10 15 20 25 30 35 40 45 50 Винахід належить до аерокосмічної техніки, конкретно - до керування літальними апаратами (ЛА) на атмосферній ділянці траєкторії польоту. Відомі датчики для вимірювання кутів атаки флюгерного типу, наприклад [1]. Їх недоліком є вимірювання тільки одного кута. Відомі системи вимірювання кутів атаки і ковзання, що містять окремі однакові датчики цих кутів, наприклад [2]. Їх недоліком є підвищені складність, вага, габарити, невелика точність з-за похибок узгодження взаємної орієнтації. Є також проблеми використання показань датчиків в системах керування внаслідок впливу перехресних зв'язків, що виникають неперпендикулярності установки осей чутливості датчиків. Флюгерні датчики спотворюють аеродинамічну картину обтікання літального апарата (ЛА) і чим їх більше, тим ситуація гірше. Крім цього датчики вимірюють саме місцеві кути атаки і ковзання і тому потрібне урахування умов обтікання для кожного із них. До того ж ускладнюється тарирування датчиків в умовах експлуатації. Таким чином, проблеми зростають пропорційно кількості окремих вимірювачів аеродинамічних кутів. Найбільш близьким аналогом є пристрій [3], який включає покажчик потоку у вигляді симетричної флюгерної аеродинамічної поверхні, встановленої на апараті за допомогою поперечної і поздовжньої осей обертання покажчика потоку, та встановленого на покажчику датчика кутової швидкості, вісь чутливості якого орієнтована перпендикулярно до площини симетрії покажчика потоку. Недоліки цього пристрою полягають у високій складності, яка пов'язана із додатковою віссю обертання, а також у проблемі із передачею сигналу через обертальну пару, великих у порівнянні із одностепеневими флюгерними датчиками кута атаки габаритах. Крім цього вимірювання швидкості зміни напрямку набігаючого потоку датчиком кутової швидкості лише із значною похибкою можна прийняти за швидкість зміни кута атаки. В основу винаходу поставлена задача розробки пристрою вимірювання кутового руху літального апарата відносно набігаючого потоку флюгерного типу з однією віссю обертання мінімальних складності, габаритів, маси, обсягу вихідних даних, високої точності, з розширеними функціональними можливостями та мінімальної потреби в доробці тих, що існують, флюгерних датчиків кута атаки. Поставлена задача вирішується тим, що в пристрій для вимірювання кутового руху літального апарата відносно набігаючого потоку, що містить покажчик потоку у вигляді флюгерної аеродинамічної поверхні, встановленої на апараті за допомогою осі обертання, та встановлений на покажчику датчик кутової швидкості, додатково введені n інтеграторів, де n≥0 послідовно з'єднаних між собою, вхід першого із них з'єднаний з виходом датчика кутової швидкості, а вісь чутливості датчика орієнтована некомпланарно, наприклад перпендикулярно, площині, паралельній осі обертання і дотичній до перетину флюгерної аеродинамічної поверхні площиною, перпендикулярною цій осі. Суть винаходу продемонстрована на кресленні. На фіг. 1 зображено вид зверху пристрою для вимірювання кутового руху літального апарата відносно набігаючого потоку за винаходом, на фіг. 2 зображено вид збоку в дії цього пристрою. Заявлений винахід реалізується таким чином. На фіг. 1 показана флюгерна аеродинамічна поверхня покажчика потоку (ФАП) 1, установлена на осі обертання 2, з якою кінематично зв'язаний датчик 3 кута відхилення покажчика, що вимірює кут атаки α. На ФАП 1 встановлено датчик кутової швидкості (ДКШ) 4, що вимірює кутову швидкість відносно осі чутливості 5. Датчик кута 3 установлено в корпусі ЛА 6. Тобто ДКШ 4 вимірює кутову швидкість рухів ФАП 1 від поворотів 7 ЛА 6 в боковій площині польоту. Оскільки ФАП 1 орієнтується по набігаючому потоку, то при бокових поворотах 7 ЛА 6 ця поверхня рухається в миттєвій площині 8, як це показано на фіг 2. На цьому кресленні показаний ЛА 6 під кутом атаки α до набігаючого потоку 9. ДКШ 4 вимірює суму проекції кутової швидкості зміни напрямку потоку в площині, що проходить через вектор повітряної швидкості ЛА 6 55 v ЛА 6 v , перпендикулярно поздовжній площині ЛА 6, та проекції кутової швидкості повороту ЛА 6 боковій площині. Тобто ДКШ 4 вимірює швидкість зміни кута ковзання ЛА 6 . Вісь чутливості 5 перпендикулярна площині 8, паралельній осі обертання 2 і дотичній до перетину ФАП 1 площиною перпендикулярною цій осі. На фіг 2. площина 8 паралельна потоку, тобто похибка вимірювання кута атаки дорівнює нулю. На фіг. 2 ДКШ 4 має значні габарити. Але в наш час нанотехнологія дозволяє виготовляти мікроелектромашинні системи (MEMS) з дуже незначними габаритно-інерційно-масовими характеристиками. 1 UA 106476 C2 5 З описаного видно, що функціональні можливості одноступеневого (з однією віссю обертання) флюгерного датчику кута атаки розширені: тепер він може вимірювати два кутових параметри - кут атаки і кутову швидкість ковзання. При цьому інтегрування сигналу ДКШ 4 дозволяє визначати значення кута ковзання і інтеграли від нього, що разом з первісним сигналом дозволяє реалізувати пропорційно-інтегрально-диференційні закони керування по каналу ковзання, як-то: u a a n a dt ... dt, ... i2 i i де u - керування; a j, j ,, ... dt - коефіцієнти ПІД - регулятора. i 10 15 20 25 Операція інтегрування перешкодозахищена і тому точність визначення кута ковзання і інтегралів від нього максимальна. При цьому обсяг вихідних даних по каналу ковзання мінімально можливий (тільки похідна від кута ковзання). Відповідно мінімальні доробки існуючих конструкцій флюгерних датчиків кута атаки. Таким чином, вирішена поставлена задача розробки пристрою вимірювання кутового руху літального апарата відносно набігаючого потоку флюгерного типу з однією віссю обертання мінімальних складності, габаритів, маси, обсягу вихідних даних, високої точності, з розширеними функціональними можливостями та мінімальної потреби в доробці тих, що існують, флюгерних датчиків кута атаки. Джерела інформації: 1. А. С. СРСР № 1330911. Флюгерный датчик угла атаки летательного апарата / Кодола В. Г., Зобков П. П., Парыгин А. Ф. 1987. 2. Пат. 54436 Росія МПК G01P 13/02, G01P 5/14, В64D 43/02. Устройство для измерения углов атаки, скольжения и приборной скорости / В. М. Лисовский, В. И. Власов, О. Н. Шакин, П. П. Сидоров. -2005137479/22. Заявл. 02.12.2005; Опубл. 27.06.2006. 3. Пат. 87721 Україна МПК, B64G 1/24, G01P 13/00. Пристрій для стабілізації руху літального апарата відносно потоку// М. М. Дронь, П. Г. Хорольський. - а200707635. Заявл. 06.07.2007; Опубл. 10.08.2009. Опис винаходу 4 с.// Бюл. № 15. ФОРМУЛА ВИНАХОДУ 30 35 Пристрій для вимірювання кутового руху літального апарата, відносно набігаючого потоку, що містить покажчик потоку у вигляді флюгерної аеродинамічної поверхні, встановленої на апараті за допомогою осі обертання, та встановлений на покажчику датчик кутової швидкості, який відрізняється тим, що в нього додатково введені n інтеграторів, де n≥0, послідовно з'єднаних між собою, вхід першого із них з'єднаний з виходом датчика кутової швидкості, а вісь чутливості датчика орієнтована некомпланарно, наприклад перпендикулярно, площині, паралельній осі обертання і дотичній до перетину флюгерної аеродинамічної поверхні площиною, перпендикулярною цій осі. 2 UA 106476 C2 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюDron Mykola Mykhailovych, Khorolskyi Petro Heorhiiovych
Автори російськоюДронь Николай Михайлович, Хорольский Петр Георгиевич
МПК / Мітки
МПК: G01P 3/00, G01P 13/00
Мітки: літального, вимірювання, пристрій, кутового, руху, апарата
Код посилання
<a href="https://ua.patents.su/5-106476-pristrijj-dlya-vimiryuvannya-kutovogo-rukhu-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання кутового руху літального апарата</a>
Пристрій для стабілізації руху літального апарата відносно потоку
Номер патенту: 87721
Опубліковано: 10.08.2009
Автори: Дронь Микола Михайлович, Хорольський Петро Георгійович
МПК: B64G 1/24, G01P 13/00
Мітки: апарата, відносної, стабілізації, руху, пристрій, літального, потоку
Формула / Реферат:
Пристрій для стабілізації літального апарата відносно набігаючого потоку, що включає покажчик потоку у вигляді симетричної крилоподібної аеродинамічної поверхні, встановленої на апараті за допомогою поперечної осі обертання покажчика потоку і перпендикулярної до неї осі обертання, установленої в напрямку повздовжньої осі літального апарата, який відрізняється тим, що на покажчику потоку встановлений датчик кутової швидкості, причому так, що...
Пристрій для стабілізації обертального руху літального апарата в набігаючому потоці
Номер патенту: 105904
Опубліковано: 10.07.2014
Автори: Хорольський Петро Георгійович, Дронь Микола Михайлович
МПК: G01P 13/00, B64G 1/24
Мітки: пристрій, літального, апарата, руху, потоці, обертального, стабілізації, набігаючому
Формула / Реферат:
Пристрій для стабілізації обертального руху літального апарата в набігаючому потоці, який включає покажчик потоку у вигляді симетричної крилової аеродинамічної поверхні, встановленої на апараті за допомогою поперечної осі обертання і перпендикулярної до неї осі обертання, установленої в напрямку повздовжньої осі літального апарата, та датчик кутової швидкості, який відрізняється тим, що цей датчик установлено так, що його вісь чутливості...
Відмовостійкий блок вимірювачів параметрів руху мультироторного літального апарата
Номер патенту: 65275
Опубліковано: 25.11.2011
Автори: Вєдєрнікова Оксана Григорівна, Винник Ксенія Вікторівна, Руденко Кирило Ігоревич, Кісс Денис Сергійович, Джулгаков Віталій Георгійович
МПК: G05D 1/08
Мітки: руху, мультироторного, вимірювачів, апарата, літального, блок, параметрів, відмовостійкий
Формула / Реферат:
Відмовостійкий блок вимірювачів параметрів руху мультироторного літального апарата, що містить три датчики кутової швидкості, два акселерометри для вимірювання лінійних прискорень, реалізовані в одному корпусі мікросхеми, головний вимірювальний мікроконтролер, який відрізняється тим, що містить додатковий акселерометр, аналого-цифровий перетворювач, входи якого зв'язані з датчиками кутової швидкості і акселерометрами, а вихід підключено до...
Частотно-часовий метод пошуку, розпізнавання та вимірювання параметрів руху літального апарата
Номер патенту: 55645
Опубліковано: 27.12.2010
Автор: Коломійцев Олексій Володимирович
МПК: G01S 17/42, G01S 17/66
Мітки: руху, вимірювання, розпізнавання, частотно-часовий, пошуку, апарата, метод, параметрів, літального
Формула / Реферат:
Частотно-часовий метод пошуку, розпізнавання та вимірювання параметрів літального апарата (ЛА), який полягає у тому, що на передавальному боці лазерної інформаційно-вимірювальної системи (ЛІВС) із синхронізованого спектра випромінювання одномодового багаточастотного лазера виділяють необхідні пари частот для створення рівносигнального напрямку у вигляді чотирьох, які частково перетинаються, парціальних діаграм спрямованості (ДС),...
Пристрій для посадки літального апарата
Номер патенту: 34342
Опубліковано: 11.08.2008
Автори: Блаженний Валерій Іванович, Куровська Тетяна Юріївна, Гладков Віктор Михайлович, Якобінчук Олександр Вікторович, Слєпов Лев Іванович
МПК: B64F 1/00
Мітки: пристрій, посадки, апарата, літального
Формула / Реферат:
1. Пристрій для посадки літального апарата, який містить посадкову смугу, гальмівний пристрій, який відрізняється тим, що додатково містить транспортну платформу, що містить двигун, пристрій вимірювання координат і швидкості літального апарата, пристрій керування, приймач, при цьому посадкова смуга виконана як пристрій фіксації літального апарата, причому гальмівний пристрій розташовано на транспортній платформі.2. Пристрій для посадки...
Попередній патент: Спосіб вакцинації свині проти високопатогенного репродуктивно-респіраторного синдрому свиней (hp prrs)
Наступний патент: Гідравлічна система знаряддя для використання з трактором (варіанти)
Випадковий патент: Кузов залізничного піввагона з глухою підлогою