Спосіб інформаційного забезпечення маневрування морського судна
Номер патенту: 114868
Опубліковано: 27.03.2017
Автори: Товстокорий Олег Миколайович, Бень Андрій Павлович, Мальцев Станіслав Едуардович

Формула / Реферат
Спосіб інформаційного забезпечення маневрування морського судна, в якому розраховують координати полюсу повороту та показують положення полюса повороту на контурі судна, який відрізняється тим, що розраховують координати полюсу повороту шляхом вимірювання тангенціальних швидкостей на носовому та кормовому перпендикулярах відносно води за допомогою допплерівського лагу з урахуванням швидкості та напрямку течії.
Текст
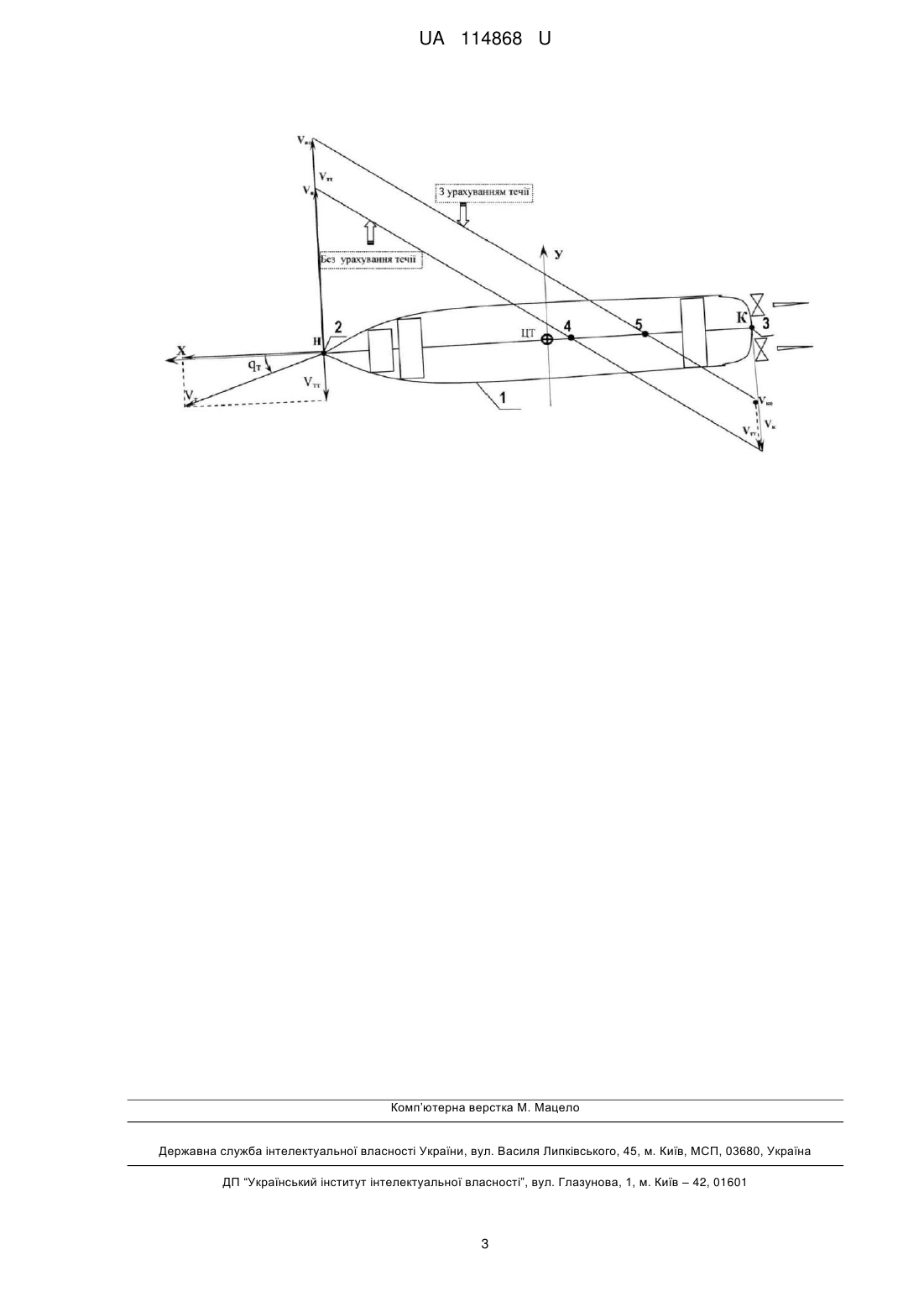
Реферат: UA 114868 U UA 114868 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до способів інформаційного забезпечення управління рухом судна при маневруванні і використовується для визначення положення полюсу повороту, без інформації про внутрішні і зовнішні управляючі сили, для оперативного управління рухом суден при маневруванні і використані буксирів. Найближчим аналогом по технічній сутті є модель [Товстокорий О.М., Мальцев С.Ε., Бень А.П. Патент на корисну модель № 100293 від 27.07.2015 – найближчий аналог], в якій розраховують координати полюсу повороту та показують положення полюса повороту шляхом вимірювання тангенціальних швидкостей на носовому та кормовому перпендикулярах. Недоліком зазначеного способу є те, що система GPS за своїм фізичним змістом показує швидкість судна відносно ґрунту. Положення ж полюсу повороту на судні потрібно визначати відносно води. Щоб визначити положення ПП відносно води, належить визначити тангенціальні швидкості відносно води, та вже по ним визначити положення ПП, тобто визначити положення полюсу повороту з урахуванням течії. В основу корисної моделі поставлена задача створити спосіб інформаційного забезпечення маневрування морського судна, в якому за рахунок технологічних особливостей було б можливим інформаційне забезпечення маневрування в стислих умовах, зниження ризиків виникнення аварійних ситуацій при проводці судна при використанні буксирних суден для забезпечення безпечного маневрування. Поставлена задача вирішується тим, що в запропонованому способі інформаційного забезпечення маневрування морського судна, розраховують координати полюсу повороту, визначають положення точки прикладання рівнодіючої бокових сил та показують положення полюса повороту і точки прикладання бокових сил на контурі судна, в якому згідно корисної моделі розраховують координати полюсу повороту шляхом вимірювання тангенціальних швидкостей на носовому та кормовому перпендикулярах за допомогою допплерівського лагу та корегуванням їх урахуванням течії. На відміну від найближчого аналогу у запропонованому способі розраховують координати полюсу повороту шляхом вимірювання тангенціальних швидкостей на носовому та кормовому перпендикулярах відносно води без урахування течії, що дозволяє отримати інформаційне забезпечення маневрування в стислих умовах, знизити ризики виникнення аварійних ситуацій при проводці судна при використанні буксирних суден для забезпечення безпечного маневрування. Вимірювання тангенціальних швидкостей точок на носовому та кормовому перпендикулярах діаметральної площини відносно води з урахуванням течії забезпечує вхідні дані для розрахунку положення полюсу повороту, які виникають при маневруванні судна, яке підлягає проводці, забезпечує підвищення інформаційного забезпечення, а саме шляхом високоточного розрахунку положення полюсу повороту і як результат отримання даних для розстановки буксирів при маневруванні і використання руля і гвинта для управління. Запропонований розрахунок положення полюсу повороту на корпусі при існуючому розташуванні прикладених до корпусу зовнішніх і внутрішніх сил забезпечує своєчасне визначення положення полюсу повороту і точки рівнодіючої бокових сил відносно води з урахуванням течії. Подача інформації про положення полюсу повороту та його візуальної індикації забезпечує отримання даних для прийняття рішення по оптимальній розстановці буксирів при маневруванні і використання управляючих сил від руля та гвинта для управління рухом судна. Суть корисної моделі пояснюється кресленням - графічне зображення на корпусі судна 1 шляхом вимірювання тангенціальних швидкостей на носовому 2 та кормовому 3 перпендикулярах схеми способу визначення полюсу повороту 4 і його розташування відносно центра ваги, а також визначення відкоригованого положення полюсу повороту 5 відносно води з урахуванням течії. Спосіб інформаційного забезпечення маневрування морського судна здійснюють шляхом вимірювання допплерівським лагом швидкостей та напрямків руху на носовому 2, та на кормовому 3 перпендикулярах, швидкості та напрямку течії, розраховують тангенціальні швидкості руху на носовому 2, та на кормовому 3 перпендикулярах відносно води з урахуванням течії. Після цього розраховують координати положення полюсу повороту та координати положення рівнодіючої прикладених до корпусу зовнішніх і внутрішніх сил. Після розрахунку дані про положення полюсу повороту та точки прикладення рівнодіючої сили подаються на індикатор з дисплеєм. Для розрахунку тангенціальних швидкостей відносно води проводять визначення курсового кута течії qT за формулою: qт ИК К т 1 UA 114868 U 5 10 15 20 Тангенціальна складова течії буде дорівнювати: Vтт Vт sin qт , де Vт - швидкість течії(м/с); Vтт - тангенціальна швидкість течії(м/с). Виконавши геометричне додавання векторів тангенціальних швидкостей носа та корми з урахуванням їхніх знаків та знака вектору течії, отримують Vно Vн Vтт Vко Vк Vтт де Vн - тангенціальна швидкість точки діаметральної площини на носовому перпендикулярі (м/с); Vк - тангенціальна швидкість точки діаметральної площини на кормовому перпендикулярі (м/с); Vно - тангенціальна швидкість точки діаметральної площини на носовому перпендикулярі відносно води з урахуванням течії(м/с); Vко - тангенціальна швидкість точки діаметральної площини на кормовому перпендикулярі відносно води з урахуванням течії(м/с); З'єднують отримані вектори Vно та Vко відтинком прямої. У точці 5 перетину цього відтинку з діаметральною площиною отримують положення полюсу повороту відносно води з урахуванням течії. Для розрахунку абсциси полюсу повороту по тангенціальним швидкостям носа та корми з урахуванням течії використовують формулу: Vно ХВ ХА ХА ; Хпп Vко Vно де Хпп - абсциса полюса повороту з відповідним знаком «+» в сторону носу і «-» в сторону корми відносно центра ваги; ХВ 0,5 L - координата точки діаметральної площини на кормовому перпендикулярі(м); ХA 0,5 L - координата точки діаметральної площини на носовому перпендикулярі(м); L - довжина судна між перпендикулярами(м). Координати точки прикладання рівнодіючої поперечних Pрів 25 сил XР по наступним формулам. При відносних координатах полюсу повороту Xпп Хпп / L 0,5 ; 1 4 1 2 1 Xпп Xпп 6 4 32 . XР 2 3 1 Xпп Xпп 3 2 При відносних координатах полюсу повороту Xпп Хпп / L 0,5 ; 1 Xпп 6 . XР 1 2 Xпп 12 Відстеження змін положення полюсу повороту дозволяє отримувати непереривну інформацію стосовно необхідності зміни плану маневрування без затримок, притаманних приладам, що оцінюють відхилення за показниками, що спостерігаються. Здійснення даного способу дозволить судноводію оперативно управляти рухом судна, шляхом контролю точки полюсу повороту, координати якої визначаються без необхідності вводити дані про режими роботи суднових та зовнішніх управляючих сил, що значно прискорює прийняття рішення по управлінню процесом маневрування і зменшує вірогідність виникнення непередбачених ситуацій. 30 35 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 Спосіб інформаційного забезпечення маневрування морського судна, в якому розраховують координати полюсу повороту та показують положення полюса повороту на контурі судна, який відрізняється тим, що розраховують координати полюсу повороту шляхом вимірювання тангенціальних швидкостей на носовому та кормовому перпендикулярах відносно води за допомогою допплерівського лагу з урахуванням швидкості та напрямку течії. 2 UA 114868 U Комп’ютерна верстка М. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G08G 3/00
Мітки: морського, забезпечення, судна, спосіб, маневрування, інформаційного
Код посилання
<a href="https://ua.patents.su/5-114868-sposib-informacijjnogo-zabezpechennya-manevruvannya-morskogo-sudna.html" target="_blank" rel="follow" title="База патентів України">Спосіб інформаційного забезпечення маневрування морського судна</a>
Спосіб інформаційного забезпечення маневрування морського судна
Номер патенту: 100293
Опубліковано: 27.07.2015
Автори: Товстокорий Олег Миколаєвич, Бень Андрій Павлович, Мальцев Станіслав Едуардович
МПК: G08G 3/00
Мітки: інформаційного, забезпечення, маневрування, судна, спосіб, морського
Формула / Реферат:
Спосіб інформаційного забезпечення маневрування морського судна, при якому розраховують координати полюса повороту, визначають положення точки прикладання рівнодіючої бокових сил та показують положення полюса повороту і точки прикладання бокових сил на контурі судна, який відрізняється тим, що розраховують координати полюса повороту шляхом вимірювання тангенціальних швидкостей на носовому та кормовому перпендикулярах.
Пристрій для інформаційного забезпечення лоцманської проводки морського судна
Номер патенту: 78679
Опубліковано: 25.03.2013
Автори: Соколенко Василь Іннокентійович, Ворохобін Ігор Ігорович, Голіков Володимир Володимирович, Мальцев Анатолій Сідорович
МПК: G08G 3/00, B63B 49/00
Мітки: лоцманської, морського, інформаційного, проводки, судна, забезпечення, пристрій
Формула / Реферат:
Пристрій для інформаційного забезпечення лоцманської проводки морського судна, що містить систему первинної обробки, яка включає блок координат шляхових точок та блок визначення координат антени приймача, зв'язані з блоком перерахунку координат на центр ваги, зв'язаний з блоком розрахунку характеристик повороткості, який в свою чергу зв'язаний з блоком розрахунку координат траєкторних точок прямолінійних і криволінійних траєкторій, система...
Пристрій для інформаційного забезпечення процесу керування судном під час маневрування
Номер патенту: 91006
Опубліковано: 25.06.2014
Автори: Мальцев Станіслав Едуардович, Голіков Володимир Володимирович
МПК: G08G 3/00
Мітки: забезпечення, керування, інформаційного, маневрування, судном, процесу, пристрій
Формула / Реферат:
Пристрій для інформаційного забезпечення процесу керування судном під час маневрування, що містить систему первинної обробки, яка містить блок вхідних даних, зв'язану з системою вторинної обробки, яка містить електронну обчислювальну машину і сполучена з індикатором, який містить дисплей, блок органів керування, який відрізняється тим, що система первинної обробки інформації має блок вводу параметрів плеча і вектора зовнішніх і внутрішніх...
Пристрій для інформаційного забезпечення процесу управління судном
Номер патенту: 97227
Опубліковано: 10.03.2015
Автори: Мальцев Станіслав Едуардович, Товстокорий Олег Миколаєвич, Бень Андрій Павлович
МПК: G08G 3/00
Мітки: процесу, пристрій, забезпечення, судном, управління, інформаційного
Формула / Реферат:
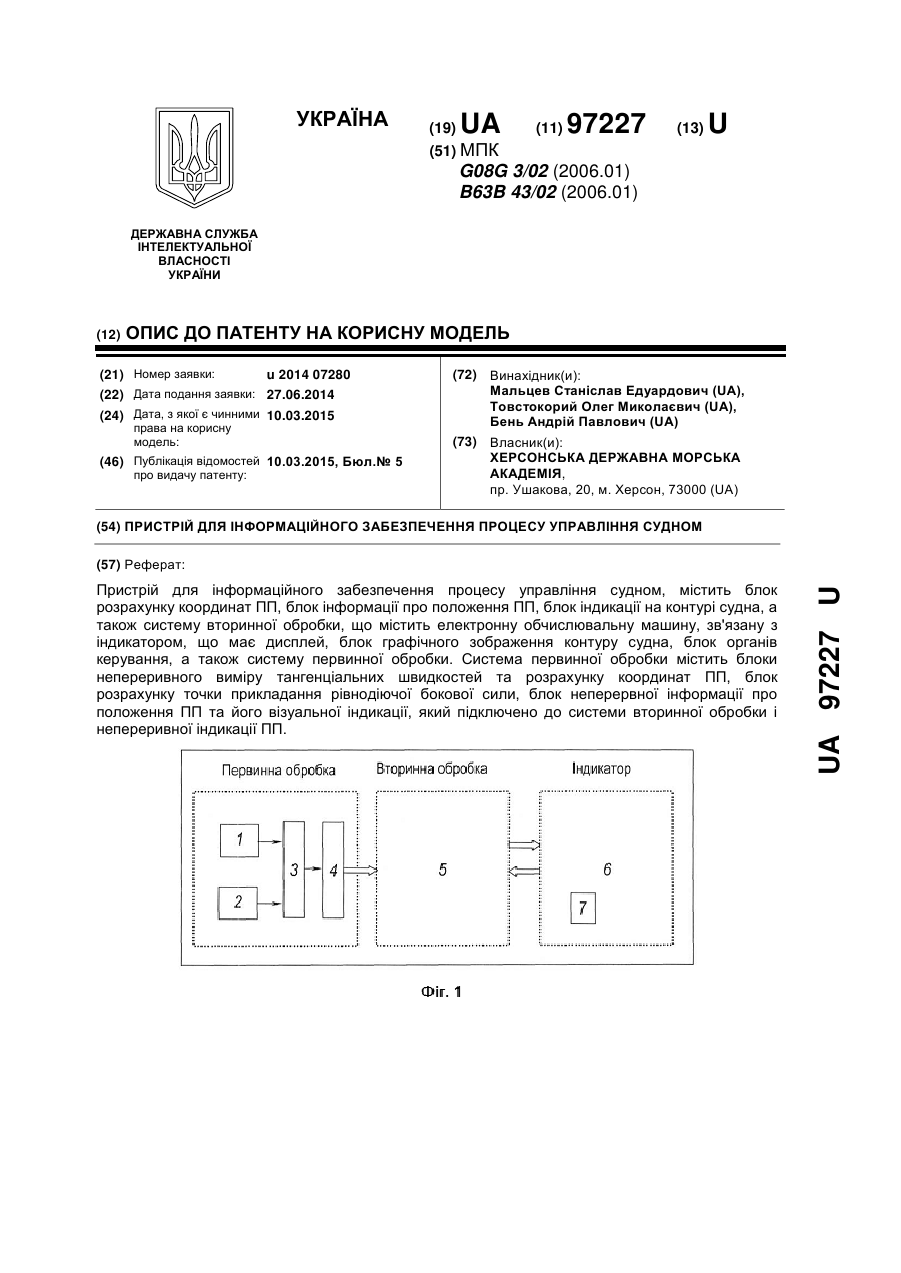
Пристрій для інформаційного забезпечення процесу управління судном, що містить блок розрахунку координат ПП, блок інформації про положення ПП, блок індикації на контурі судна, а також систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок графічного зображення контуру судна, блок органів керування, а також систему первинної обробки, яка відрізняється тим, що система первинної...
Система інформаційного забезпечення швартування танкера vlcc до монобуя

Номер патенту: 98720
Опубліковано: 12.05.2015
Автори: Мальцев Станіслав Едуардович, Деревянко Александр Анатолійович
МПК: B63B 21/00
Мітки: танкера, інформаційного, швартування, забезпечення, система, монобуя
Формула / Реферат:
Система інформаційного забезпечення маневрування танкерного судна типу VLCC до монобуя, що містить блок розрахунку маневрових характеристик, блок розрахунку та індикації на контурі судна інформації про положення полюсу повороту (ПП), блок перерахунку координат від антени на центр ваги, блок планування траєкторії інверсним способом, а також систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має...
Попередній патент: Конструкція пайола надувного човна
Наступний патент: Збірний шліфувальний круг
Випадковий патент: Багатошпиндельна головка