Двоканальна система високоточного керування положенням об’єкта у просторі та його активного віброзахисту на основі електромагнітного підвісу

Формула / Реферат
Двоканальна система високоточного керування положенням об'єкта у просторі та його активного віброзахисту на основі електромагнітного підвісу, що містить основний електромагнітний підвіс зі зворотним зв'язком по зазору, яка відрізняється тим, що введено додатковий електромагнітний підвіс зі зворотним зв'язком по положенню об'єкта, установлений на рухомій частині основного електромагнітного підвісу, який разом з основним електромагнітним підвісом утворює двоканальну систему керування положенням об'єкта у просторі.
Текст
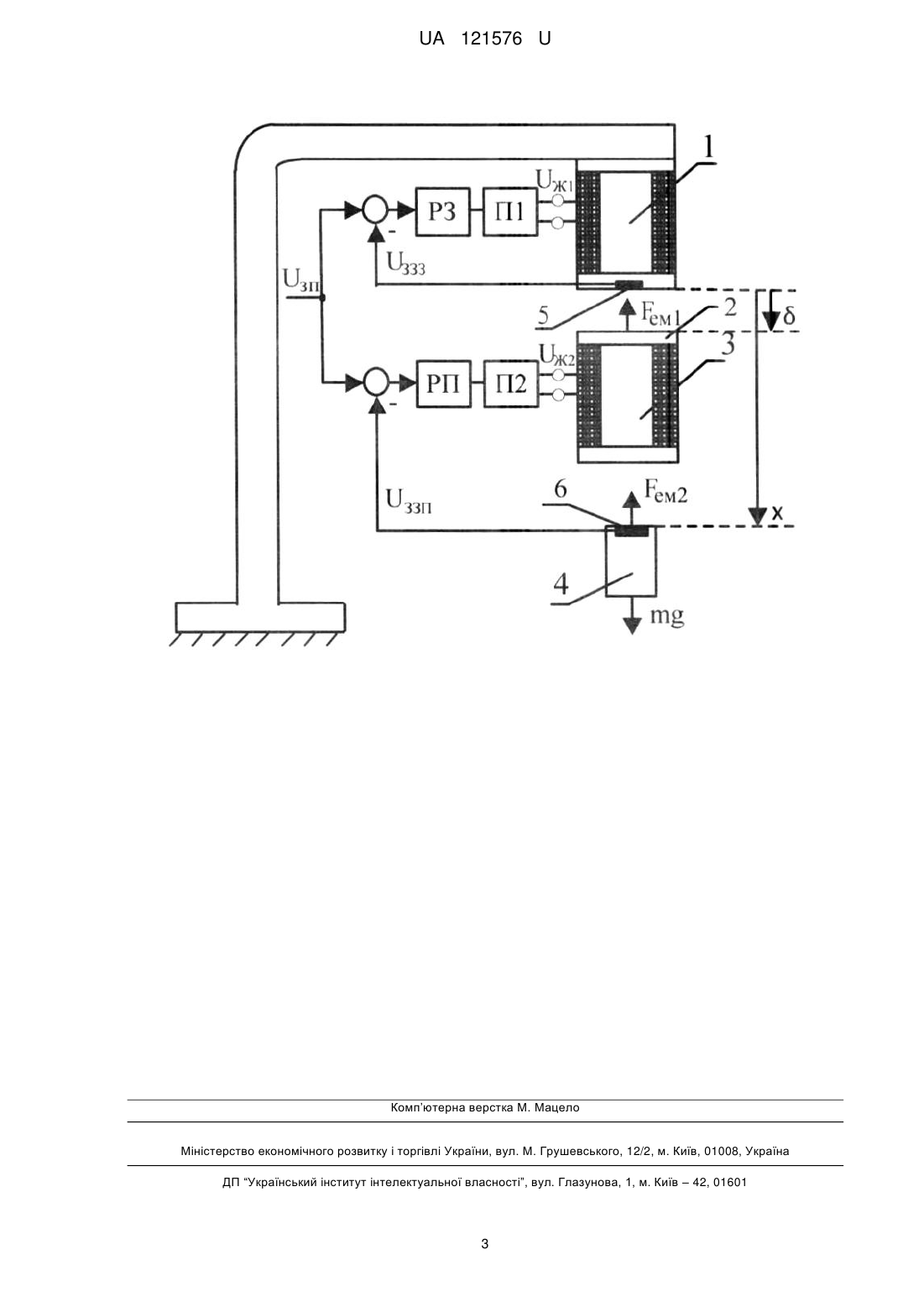
Реферат: Двоканальна система високоточного керування положенням об'єкта у просторі та його активного віброзахисту на основі електромагнітного підвісу, що містить основний електромагнітний підвіс зі зворотним зв'язком по зазору, причому введено додатковий електромагнітний підвіс зі зворотним зв'язком по положенню об'єкта, установлений на рухомій частині основного електромагнітного підвісу, який разом з основним електромагнітним підвісом утворює двоканальну систему керування положенням об'єкта у просторі. UA 121576 U (54) ДВОКАНАЛЬНА СИСТЕМА ВИСОКОТОЧНОГО КЕРУВАННЯ ПОЛОЖЕННЯМ ОБ'ЄКТА У ПРОСТОРІ ТА ЙОГО АКТИВНОГО ВІБРОЗАХИСТУ НА ОСНОВІ ЕЛЕКТРОМАГНІТНОГО ПІДВІСУ UA 121576 U UA 121576 U 5 10 15 20 25 30 35 40 45 50 55 60 Заявлена корисна модель належить до приладобудування, машинобудування, транспорту на «магнітній подушці» і може використовуватися для стабілізації положення та віброзахисту вузлів машин, приладів, обладнання та людей при керуванні рухомими об'єктами (наземний транспорт, судна, підводні човни, авіаційно-космічні літальні апарати, автомобілі) в умовах координатних та зовнішніх збурень. Відомий «Електромагнітний підвіс» [Авторське свідоцтво СРСР: SU 943581, MПK: G01R 1/10, опубл. 15.07.1982], що містить основний і додатковий електромагніти, обмотки яких з'єднані з відповідними конденсаторами; основний електромагніт розміщений на нерухомій основі і оснащений двома якорями, закріпленими на підвішуваному об'єкті, кожен з яких розташований над полюсами основного і додаткового електромагнітів, при цьому додатковий електромагніт розміщений на нерухомій основі. Недоліком відомого електромагнітного підвісу є те, що живлення електромагнітів здійснюється змінною напругою регульованої частоти, що ускладнює технічну реалізацію магнітного підвісу і призводить до додаткових втрат електричної енергії на вихрові струми та гістерезис. Запропоноване рішення не дозволяє реалізувати багатоканальне керування об'єктом внаслідок відсутності датчиків зазору та положення. Крім того, конструкцією електромагнітного підвісу не передбачено активний віброзахист підвішуваного об'єкта. Найбільш близьким до запропонованої корисної моделі є «Магнітний підвіс» [Авторське свідоцтво СРСР: SU 1062451 А1, MПK: F16F 15/03, опубл. 23.12.1983], що містить два електромагніти з сердечниками, допоміжне тіло, встановлені на електромагнітах датчики положення, вихід кожного з котрих через коригуючу ланку і суматор пов'язаний з підсилювачем потужності. Підвіс обладнаний датчиками прискорення, встановленими на електромагніті, пов'язаному з об'єктом та допоміжному тілі, а також додатковими коригувальними ланками і суматорами. Недоліком відомого рішення є те, що датчики прискорення установлені на підвішуваному об'єкті та допоміжному тілі, а не на основі, яка піддається збурювальним діям, що зменшує швидкодію та ефективність системи віброзахисту. Використання датчиків відносного положення елементів магнітного підвісу не дає можливості забезпечити керування положенням об'єкта відносно нерухомої системи координат та реалізувати багатоканальне керування об'єктом. Неминучий взаємний вплив електромагнітів підвісу позначається на стійкості систем автоматичного регулювання зазорів, що знижує ефективність віброзахисту. В основу корисної моделі поставлено задачу удосконалення системи високоточного керування положенням об'єкта у просторі та його активного віброзахисту завдяки використанню електромагнітного підвісу, побудованого за двоканальною структурою [1, 2]. Поставлена задача вирішується тим, що двоканальна система високоточного керування положенням об'єкта у просторі та його активного віброзахисту на основі електромагнітного підвісу містить основний електромагнітний підвіс, який включає електромагніт постійного струму, якір, на який діє електромагнітне зусилля, регульоване джерело напруги для живлення електромагніту, датчик зазору, зворотний зв'язок по зазору та регулятор зазору. Новим є те, що введено додатковий електромагнітний підвіс зі зворотним зв'язком по положенню об'єкта, установлений на рухомій частині основного електромагнітного підвісу, який разом з основним електромагнітним підвісом утворює двоканальну систему керування положенням об'єкта у просторі. Суть корисної моделі пояснюється кресленням, на якому показана функціональна схема двоканальної системи високоточного керування положенням об'єкта у просторі та його активного віброзахисту, де: 1 - основний електромагніт; 2 - якір основного електромагніту з закріпленим на ньому допоміжним електромагнітом 3; 4 - якір допоміжного електромагніту та пов'язане з ним корисне навантаження (об'єкт); 5 - датчик зазору основного електромагніту; 6 датчик координати (положення) об'єкта у просторі; РЗ - регулятор зазору основного електромагніту; РП - регулятор положення об'єкта; П1, П2 - керовані перетворювачі постійної напруги каналів грубого та точного відліку, відповідно; UЖ1, UЖ2 - напруги живлення котушок основного та допоміжного електромагнітів, відповідно; - робочий повітряний зазор основного електромагніту; х - координата положення об'єкта відносно нерухомої системи координат; m маса об'єкта; g - прискорення вільного падіння; UЗП, UЗЗЗ, UЗЗП - сигнали завдання положення, зворотного зв'язку по зазору основного електромагніту та зворотного зв'язку за положенням, відповідно; FЕМ1, FЕМ2 - електромагнітні зусилля основного та допоміжного електромагнітів, відповідно. Двоканальна система високоточного керування положенням об'єкта у просторі та його активного віброзахисту на основі електромагнітного підвісу працює наступним чином. Електромагнітні зусилля FЕМ1, FЕМ2, створювані основним та допоміжним електромагнітами, 1 UA 121576 U 5 10 15 20 25 компенсують вагу підвішуваного об'єкта і утримують його в заданому положенні відносно нерухомої системи координат х. При зміні положення (координати) рухомих частин електромагнітного підвісу внаслідок дії зовнішніх та координатних збурень, датчик зазору основного електромагніту 5 або датчик координати об'єкта 6 виробляють сигнали, пропорційні новим значенням зазору 8 або координати об'єкту х. Ці сигнали подаються, відповідно, на входи регуляторів зазору РЗ та положення РП як сигнали зворотних зв'язків. Регулятори зазору та положення забезпечують створення електромагнітами додаткових регулюючих дій на підвішуваний об'єкт, які компенсують дію збурень і, таким чином, забезпечують стабілізацію положення об'єкта у просторі та його активний віброзахист. При цьому основний електромагніт, включений в канал грубого відліку, долає зовнішні та координатні збурення, а допоміжний електромагніт, включений в канал точного відліку, усуває похибку каналу грубого відліку [1]. Пропонована корисна модель, завдяки використанню двоканального керування положенням об'єкта у просторі, набуває якісно нових властивостей, порівняльно з одноканальною, за рахунок підвищення порядку астатизму всієї двоканальної системи в цілому по відношенню до порядку астатизму кожного окремого каналу регулювання, без погіршення стійкості системи [1, 2]. Завдяки цьому збільшується точність, швидкодія та чутливість електромагнітного підвісу, а також усувається кінематична похибка при русі з усталеною швидкістю. Поєднання функцій магнітного підвісу і активного віброзахисту в єдиній структурі забезпечує формування інваріантної характеристики, що вирішує проблему створення безконтактної системи керування положенням об'єкта у просторі та його активного віброзахисту. Джерела інформації: 1. Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами. - Л: Энергоиздат, 1982. - 392 с. 2. Теряєв B.I. Принципи технічної реалізації двоканальних електромеханічних систем. Електромеханічні і енергозберігаючі системи. Щоквартальний науково-виробничий журнал. Кременчук: КрНУ, 2016. - Вип. № 3/2016 (34). - с. 17-23. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 Двоканальна система високоточного керування положенням об'єкта у просторі та його активного віброзахисту на основі електромагнітного підвісу, що містить основний електромагнітний підвіс зі зворотним зв'язком по зазору, яка відрізняється тим, що введено додатковий електромагнітний підвіс зі зворотним зв'язком по положенню об'єкта, установлений на рухомій частині основного електромагнітного підвісу, який разом з основним електромагнітним підвісом утворює двоканальну систему керування положенням об'єкта у просторі. 2 UA 121576 U Комп’ютерна верстка М. Мацело Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F16F 15/03, F16C 32/04
Мітки: підвісу, електромагнітного, двоканальна, просторі, віброзахисту, високоточного, керування, положенням, активного, об'єкта, система, основі
Код посилання
<a href="https://ua.patents.su/5-121576-dvokanalna-sistema-visokotochnogo-keruvannya-polozhennyam-obehkta-u-prostori-ta-jjogo-aktivnogo-vibrozakhistu-na-osnovi-elektromagnitnogo-pidvisu.html" target="_blank" rel="follow" title="База патентів України">Двоканальна система високоточного керування положенням об’єкта у просторі та його активного віброзахисту на основі електромагнітного підвісу</a>
Система стабілізації положення та активного віброзахисту об’єкта у просторі на основі електромагнітного підвісу
Номер патенту: 120636
Опубліковано: 10.11.2017
Автор: Теряєв Віталій Іванович
МПК: F16F 15/03
Мітки: об'єкта, стабілізації, активного, система, просторі, основі, положення, підвісу, електромагнітного, віброзахисту
Формула / Реферат:
Система стабілізації положення та активного віброзахисту об'єкта у просторі, що містить електромагнітний підвіс, який включає електромагніт постійного струму, якір з підвішуваним об'єктом, на який діє електромагнітне зусилля, регульоване джерело напруги для живлення електромагніта, датчик зазору, головний зворотний зв'язок по зазору та регулятор положення об'єкта, яка відрізняється тим, що для компенсації дії координатних та зовнішніх...
Система керування положенням платформи
Номер патенту: 48332
Опубліковано: 15.08.2002
Автори: Магерамов Лютфалій Курбан-Алієвич, Наплеков Михайло Іванович, Смоляков Василь Андрійович, Лещенко В'ячеслав Михайлович, Безлепкін Олександр Андрійович, Бусяк Юрій Митрофанович, Головіна Олена Василівна, Качанов Петро Олексійович, Ребров Олексій Анатолійович, Васильченков Олег Георгійович
МПК: G05D 1/08
Мітки: положенням, платформи, система, керування
Формула / Реферат:
Система керування положенням платформи, що містить контролер персонального комп'ютера, з'єднаний із трьома електроприводами, кожний з яких містить послідовно з'єднані цифровий регулятор, електродвигун, кінематично зв'язаний з редуктором, що обладнаний датчиком положення вихідного вала редуктора i за допомогою кривошипно-шатунного механізму з'єднаний із платформою, причому до другого i третього входів цифрового регулятора відповідно...
Акселерометр та система його віброзахисту
Номер патенту: 1206
Опубліковано: 15.04.2002
Автори: Олексієнко Микола Петрович, Шервашидзе Володимир Варлаамович, Гаврилюк Володимир Леонідович, Васильєв Володимир Леонідович, Гуменюк Володимир Григорович, Шкляр Володимир Петрович, Леоненко Сергій Миколайович
МПК: G01P 15/13
Мітки: система, віброзахисту, акселерометр
Формула / Реферат:
1. Акселерометр, який містить розміщений за допомогою пружного підвісу чутливий елемент маятникового типу, датчик положення, коло зворотного зв'язку магнітоелектричного силового перетворювача з компенсаційною котушкою та схему для визначення показника прискорення, який відрізняється тим, що чутливий елемент підвішено на пружному підвісі, компенсаційна котушка встановлена на чутливому елементі між розміщеними від неї із зазором плоскими...
Датчик кутової швидкості та система його віброзахисту
Номер патенту: 1207
Опубліковано: 15.04.2002
Автори: Олексієнко Микола Петрович, Васильєв Володимир Леонідович, Гуменюк Володимир Григорович, Гаврилюк Володимир Леонідович, Леоненко Сергій Миколайович, Шкляр Володимир Петрович, Шервашидзе Володимир Варлаамович
МПК: G01C 19/00, G01P 9/00
Мітки: система, швидкості, кутової, віброзахисту, датчик
Формула / Реферат:
1. Датчик кутової швидкості, який містить розміщений за допомогою підвісу чутливий елемент з гіромотором, датчик положення, коло зворотного зв'язку та схему визначення показника кутової швидкості, який відрізняється тим, що чутливий елемент підвішено у корпусі за допомогою гнучкого підвісу, гіромотор встановлено на чутливому елементі так, що вісь його обертання направлена перпендикулярно до осі, по якій згинається підвіс, і паралельно з віссю...
Багаторівнева система керування розосередженими в просторі об’єктами
Номер патенту: 43217
Опубліковано: 10.08.2009
Автор: Мельник Володимир Сергійович
МПК: G08C 17/00
Мітки: розосередженими, керування, багаторівнева, просторі, об'єктами, система
Формула / Реферат:
Багаторівнева система керування розосередженими в просторі об'єктами, що містить локальні пристрої керування (нижній рівень), дистанційно віддалені автоматизовані робочі місця користувачів (верхній рівень) із доступом до стільникової комунікаційної системи, яка відрізняється тим, що система керування обладнана місцевим пунктом керування (проміжний рівень), який з'єднаний по радіоканалу із мережею локальних пристроїв керування та лише через...
Попередній патент: Пристрій для відокремлення від шини бортових кілець
Наступний патент: Дозатор
Випадковий патент: Нагрівач рідини