Колесо-рушій мобільного робота
Номер патенту: 45369
Опубліковано: 10.11.2009
Автори: Запорожець Юрій Михайлович, Кондратенко Юрій Пантелійович

Формула / Реферат
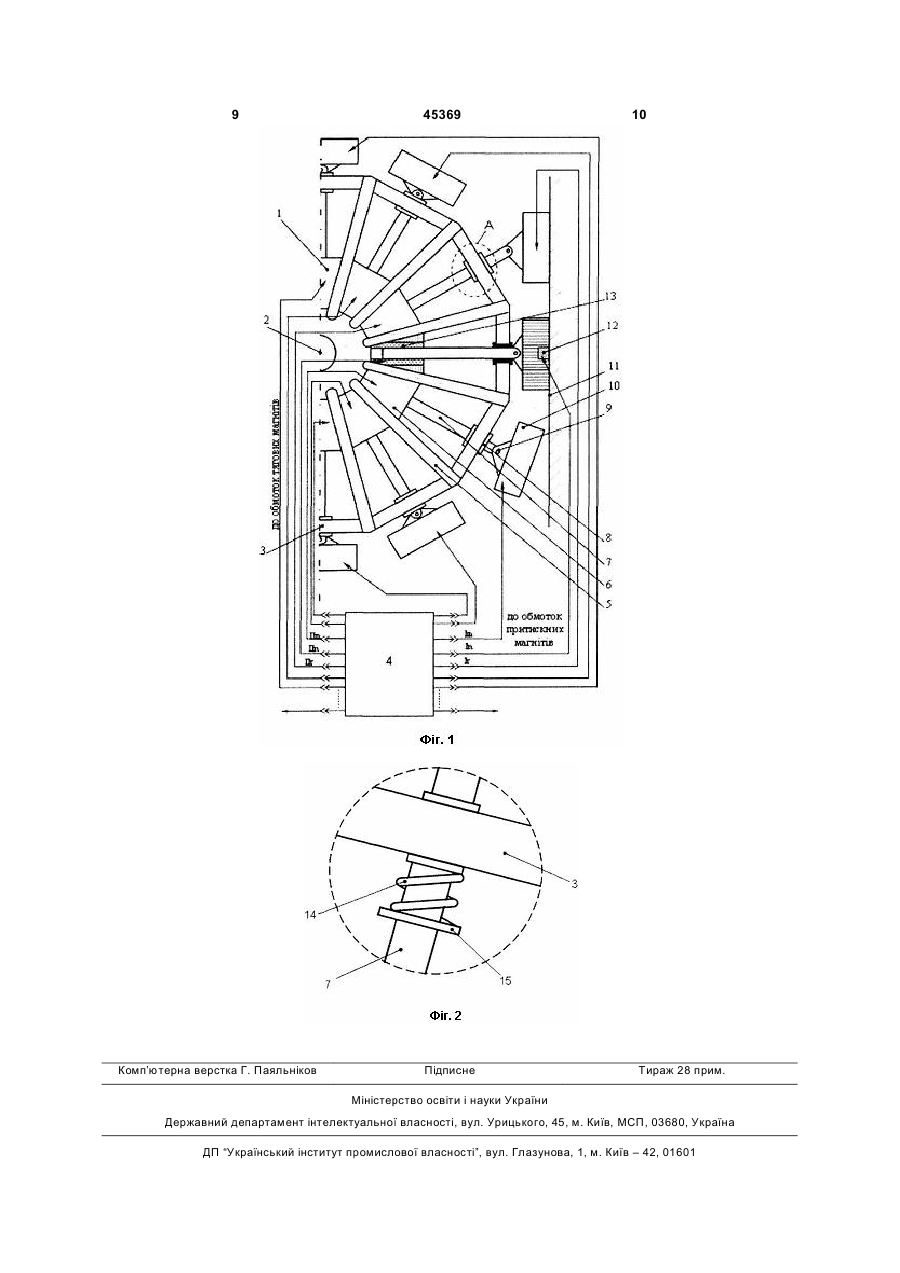
Колесо-рушій мобільного робота, що містить маточину з геометричною віссю колеса, обід зі стрижнями з їх геометричними осями, розміщеними на сторонах правильного багатокутника, точка взаємного перетину бісектрис внутрішніх кутів якого розміщена на геометричній осі колеса, вузол для з'єднання маточини з ободом у місцях, розміщених у вершинах цього багатокутника, і шину, розділену між цими місцями по окружності колеса на секції, а багатокутник розміщений у площині колеса чи паралельній їй площині, яке відрізняється тим, що додатково введений багатоканальний блок керування елементами вузла для з'єднання маточини з ободом з двома групами керованих вихідних каналів, а сам вузол для з'єднання маточини з ободом виконаний у вигляді жорстких радіальних спиць, а між кожною парою суміжних жорстких спиць розміщені розсувні спиці, які складаються з нерухомого та рухомого елементів, що кінематично з'єднані між собою з можливістю переміщення рухомого елемента відносно нерухомого уздовж їх спільної осі, яка співпадає з бісектрисою внутрішнього кута багатокутника, при цьому секції шини, що закріплені на стрижнях ободу, виконані з направляючими отворами, центр кожного з яких розміщений на лінії відповідної зазначеної бісектриси, в направляючих отворах розміщені втулки для вільного проходження через кожний направляючий отвір відповідного рухомого елемента розсувних спиць, при цьому нерухомий елемент кожної з розсувних спиць виконаний у вигляді подовжнього тягового електромагніту, осердям якого є рухомий елемент відповідної розсувної спиці з вертальним вузлом, а на осі, встановленій паралельно геометричній осі колеса на периферійній кінцівці кожного рухомого елемента із зовнішньої сторони ободу шарнірно закріплений відповідний притискний магніт з можливістю самоорієнтації його полюсної сторони під відповідним кутом нахилу до феромагнітної поверхні, з якою зчіплюється колесо-рушій, обмотки притискних магнітів електрично з'єднані з відповідними виходами першої групи виходів багатоканального блоку керування, а обмотки тягових електромагнітів підключені до відповідних виходів другої групи виходів багатоканального блоку керування.
Текст
Колесо-рушій мобільного робота, що містить маточину з геометричною віссю колеса, обід зі стрижнями з їх геометричними осями, розміщеними на сторонах правильного багатокутника, точка взаємного перетину бісектрис внутрішніх кутів якого розміщена на геометричній осі колеса, вузол для з'єднання маточини з ободом у місцях, розміщених у вершинах цього багатокутника, і шину, розділену між цими місцями по окружності колеса на секції, а багатокутник розміщений у площині колеса чи паралельній їй площині, яке відрізняється тим, що додатково введений багатоканальний блок керування елементами вузла для з'єднання маточини з ободом з двома групами керованих вихідних каналів, а сам вузол для з'єднання маточини з ободом виконаний у вигляді жорстких радіальних спиць, а між кожною парою су U 2 45369 1 3 45369 4 гусеничних коліс встановлені ферми, на які надіті щених у вершинах цього багатокутника, і шину, гусеничні стрічки з натяжним пристроєм, гусениці розділену між цими місцями по окружності колеса виконані багаторядними, обідки ведучих і ведених на секції, а багатокутник розміщений у площині коліс гусеничного приводу виконані багатогранниколеса чи паралельній їй площині, згідно корисної ми й з фіксаторами положення гусеничної стрічки, моделі додатково введений багатоканальний блок які виконані у вигляді буртиків на обідках гусеничкерування елементами вузла для з'єднання матоних коліс. Зазначений пристрій має наступні прочини з ободом з двома групами керованих вихідблеми: них каналів, а сам вузол для з'єднання маточини з - обмежена можливість пересування пристрою ободом виконаний у вигляді жорстких радіальних через перешкоди на оброблюваній феромагнітній спиць, а між кожною парою суміжних жорстких поверхні; спиць розміщені розсувні спиці, які складаються з - необхідність застосування окремого приводу нерухомого та рухомого елементів, що кінематичз редуктором для пересування гусеничних стрічок, но з'єднані між собою з можливістю переміщення що знижує надійність та збільшує масу і габарити рухомого елемента відносно нерухомого уздовж їх пристрою. спільної осі, яка співпадає з бісектрисою внутрішНайбільш близьким за технічною сутністю нього кута багатокутника, при цьому секції шини, пристроєм до запропонованого є колесо зі змінною що закріплені на стрижнях ободу, виконані з наконфігурацією обводу [Патент РФ № 2152880, правляючими отворами, центр кожного з яких розМПК7 В60В19/00, B60F3/00, 1999], що прийнятий міщений на лінії відповідної зазначеної бісектриси, за прототип. Зазначене колесо містить маточину з в направляючих отворах розміщені втулки для геометричною оссю колеса, обід зі стрижнями з їх вільного проходження через кожний направляюгеометричними осями, розміщеними по сторонах чий отвір відповідного рухомого елемента розсувправильного багатокутника, точка взаємного перених спиць, при цьому нерухомий елемент кожної з тинання бісектрис внутрішніх кутів якого розміщерозсувних спиць виконаний у вигляді подовжнього на на геометричній осі колеса, а сам багатокутник тягового електромагніту, осердям якого є рухомий розміщений у площині колеса чи паралельній їй елемент відповідної розсувної спиці з вертальним площині, вузол для з'єднання маточини з ободом у вузлом, а на осі, встановленій паралельно геомемісцях, розміщених у вершинах багатокутника, і тричній осі колеса на периферійній кінцівці кожношину, розділену між цими місцями по окружності го рухомого елемента із зовнішньої сторони ободу, колеса на секції, кожна з яких виконана з подовжшарнірно закріплений відповідний притискний магньо розміщеним каналом для охоплення ним ніт з можливістю самоорієнтації його полюсної стрижня і встановлена на ньому з можливістю посторони під відповідним кутом нахилу до феромавертання і приведення в будь-яке з двох пологнітної поверхні, з якою зчіплюється магнітножень, у одному з яких до периферії колеса оберкероване колесо-рушій, при цьому обмотки притинена сторона секції, що округлена по радіусу скних магнітів електрично з'єднані з відповідними колеса, а в іншому - друга сторона з конфігурацівиходами першої групи виходів багатоканального єю, відмінною від округленої. Такий пристрій має блоку керування, а обмотки тягових електромагнінаступні проблеми: тів підключені до відповідних виходів другої групи - мають місце обмежені функціональні можливиходів багатоканального блоку керування. вості, що не дозволяють мобільному роботу, руВинахідницький задум та істотні відмінні ознашійна система якого виконана на основі зазначеки пропонованого магнітно-керованого колесаних колес, здійснювати пересування по значно рушія полягають у тому, що у пристрої для з'єднахилених металевих поверхнях, тим більше нання маточини колеса з ободом застосовані жорвертикальних і стельових поверхнях; сткі та розсувні спиці, секції шини використані як - має місце складність конструктивного виконаправляючі для рухомої частини розсувних нання пристрою через необхідність здійснення спиць, а останні оснащені притискними магнітами кінематичного зв'язку колеса з додатковим привота тяговими електромагнітами, що керуються бадним вузлом, без якого колесо не може виконувагатоканальним блоком керування, за рахунок чого ти функції рушія. у пропонованому колесі досягається суміщення В основу корисної моделі поставлено задачу функцій притискного механізму, який забезпечує удосконалення колеса-рушія мобільного робота, в утримання колеса на вертикальних і нахилених якому змінено схемотехнічне рішення колеса з феромагнітних поверхнях, і рушія мобільного рометою адаптації його до функціонування в якості бота, у складі якого використовується пропоноваколеса-рушія у складі мобільного робота, признане колесо-рушій. Оснащення мобільних роботів ченого для виконання різнотипних технологічних пропонованими магнітно-керованими колесамиоперацій на круто нахилених феромагнітних поверушіями забезпечуватиме можливість їх застосурхнях, що розширює області застосування привання при здійсненні аварійно-рятувальних робіт строю. та різноманітних технологічних операцій, зокрема, Поставлена задача вирішується тим, що до в судноремонтному і суднобудівному виробництві, складу колеса-рушія мобільного робота, яке місна поверхнях сталевих (феромагнітних) конструктить маточину з геометричною оссю колеса, обід зі цій під будь-яким кутом їх нахилу до горизонту, стрижнями з їх геометричними осями, розміщенивключно до -180°, (тобто, на стелях), у тому числі ми на сторонах правильного багатокутника, точка на нерівних, погнутих і пошкоджених поверхнях. взаємного перетину бісектрис внутрішніх кутів якоНа Фіг.1 представлено магнітно-кероване кого розміщена на геометричній осі колеса, вузол лесо-рушій мобільного робота, зокрема одна з для з'єднання маточини з ободом у місцях, розмідвох його частин, що симетричні вертикальній осі, 5 45369 6 рстко закріпленим на рухомому елементі 7 відпоа на Фіг.2 - конструктивне виконання вертального відної розсувної спиці. вузла зі стискальною пружиною (вузол А на Фіг.1). В якості притискних магнітів можуть бути викоМагнітно-кероване колесо-рушій для мобільристані, наприклад, типові утримувальні електроного робота (Фіг.1) містить маточину 1 з геометримагніти [Квартин М. И. Электромеханические и чною оссю колеса 2, з слідом якої співпадає точка магнитные устройства автоматики и их расчет. взаємного перетинання бісектрис внутрішніх кутів М.: Высшая школа, 1973, сс. 203-217]. В якості розміщеного у площині колеса чи у паралельній їй подовжніх тягових електромагнітів можуть бути площині правильного багатокутника, сторони якого використані, наприклад, типові соленоїдні електє геометричними осями стрижнів ободу, вузол для ромагніти [Элементы судовой автоматики: Спраз'єднання маточини з ободом у місцях, розміщених вочник. Под ред. Р. А. Нелепина. - Л.: Судостроеу вершинах правильного багатокутника, шину, яка ние, 1976, сс. 235-238; Квартин М. И. розділена між цими місцями по окружності колеса Электромеханические и магнитные устройства на секції 3, що закріплені безпосередньо на стриавтоматики и их расчет. - М.: Высшая школа, 1973, жнях ободу, багатоканальний блок керування 4 сс. 203-217]. Багатоканальний блок керування моелементами вузла для з'єднання маточини з обоже бути реалізований на програмно-апаратному дом з двома групами керованих вихідних каналів, рівні за допомогою мікроконтролерів (наприклад, жорсткі радіальні спиці 5, за допомогою яких реафірм Motorola, Microchip, Toshiba та ін.) або на базі лізовано вузол для з'єднання маточини з ободом, ПЕОМ. розміщені між кожною парою суміжних жорстких Запропонований пристрій працює наступним спиць 5 розсувні спиці, які складаються з нерухочином. мого 6 та рухомого 7 елементів з вертальними У початковому (неробочому) стані на всіх ковузлами (вузол А на Фіг.1), втулки 8, які розміщені лесах-рушіях всі рухомі елементи 7 розсувних в направляючих отворах секцій шини 3 для вільноспиць з притискними магнітами 10 за допомогою го проходження через кожний направляючий отвір пружин 14 відповідних вертальних вузлів підтягнуті відповідного рухомого елемента 7 розсувних до секцій шини 3, на виходах першої І та другої ІІ спиць, осі шарнірів 9, що встановлені паралельно групи багатоканального блока керування 4 встагеометричній осі колеса на периферійній кінцівці новлені сигнали нульового рівня і, відповідно, всі кожного рухомого елемента 7 з зовнішньої сторони обмотки 12, 13 притискних і тягових магнітів є знеободу, притискні магніти 10, кожний з яких шарнірструмленими, а отже кінематичний зв'язок між нено закріплений на відповідній осі 9 з можливістю рухомими 6 та рухомими елементами 7 всіх розсусамоорієнтації його полюсної сторони під відповівних спиць є відсутнім. Перед початком дним кутом нахилу до феромагнітної поверхні 11, пересування мобільного робота, розміщеного у з якою саме за допомогою притискних магнітів 10 робочій зоні феромагнітної поверхні 11, на кожнозчіплюється колесо-рушій. Обмотки притискних му колесі з декількох притискних магнітів 10, примагнітів 12 підключені до відповідних виходів наймні, два робочі суміжні притискні магніти 10 {KIm,In,Ir ,K} першої групи багатоканального блока зорієнтовані за допомогою їх шарнірного з'єднання керування 4. Кількість виходів першої групи багана осі 9 полюсними сторонами в напрямку феротоканального блока керування 4 відповідає загамагнітної поверхні 11, розсувні спиці з зазначенильній кількості розміщених на колесі-рушії притисми притискними магнітами 10 розсунуті до повного кних магнітів 10. Нерухомий 6 та рухомий 7 їх дотику з феромагнітною поверхнею 11 з забезелементи кожної розсувної спиці кінематично з'єдпеченням при цьому мінімального зазору між понані між собою з можливістю переміщення рухомоверхнею полюсної сторони відповідного магніту 10 го елемента 7 відносно нерухомого елемента 6 та феромагнітною поверхнею 11, а в обмотки 12 уздовж їх спільної осі, яка співпадає з відповідною вищевказаних (робочих) притискних магнітів від бісектрисою внутрішнього кута багатокутника. Непершої групи виходів Ir і In багатоканального блорухомі елементи 6 розсувних спиць виконані у вику керування 4 подано струм. За допомогою зугляді подовжніх тягових електромагнітів, обмотки силь, створених магнітним полем робочих притис13 яких підключені до відповідних виходів кних магнітів 10, магнітно-керовані колеса-рушії {KIIm,IIn,IIr ,K} другої групи багатоканального блозчіплюються з феромагнітною поверхнею 11. При ка керування 4. цьому сигнали, сформовані на виходах IIr і IIn Кількість виходів другої групи багатоканально(Фіг.1) багатоканального блоку керування 4, заго блока керування 4 відповідає загальній кількості безпечують подачу струму в обмотки 13 відповідрозміщених на колесі-рушії подовжніх тягових елених тягових електромагнітів, за рахунок чого рама ктромагнітів, осердями яких є рухомі елементи 7 мобільного робота утримується на феромагнітній розсувних спиць з відповідними вертальними вузповерхні 11. Мобільний робот здійснює пересулами. Вказані подовжні тягові електромагніти привання вздовж феромагнітної поверхні 11 одночасзначені для здійснення регульованого кінематичними кроками всіх коліс-рушіїв. При цьому на кожного зв'язку між нерухомими 6 та рухомими ному колесі для відповідної третьої розсувної елементами 7 відповідних розсувних спиць. Верспиці, що є наступною за відліком проти напрямку тальний вузол рухомого елемента 7 кожної розсуобертання колеса по відношенню до двох розсуввної спиці (Фіг.2) містить насаджену на рухомий них спиць з робочими притискними магнітами 10, елемент 7 розсувної спиці стискальну пружину 14, багатоканальний блок керування 4 формує на виодин кінець якої контактує (впирається) з відповідною секцію шини 3, а інший - з фіксатором 15, жоході Im першої групи (Фіг.1) сигнал, згідно з яким в обмотку 12 встановленого на цій спиці притискного 7 45369 8 зчеплення з феромагнітною поверхнею 11 і втрамагніту 10 подається струм. Внаслідок цього на чає роль робочого притискного магніту. При цьому кожному колесі-рушії формується відповідне магданий притискний магніт 10 під дією пружини 14 нітне поле, під дією якого притискний магніт 10 вертального вузла першої спиці встановлюється в третьої розсувної спиці, кінематичний зв'язок між стаціонарне (початкове) положення на секції шини рухомим 7 та нерухомим 6 елементами якої відсу3 колеса, після чого кожне колесо мобільного ротній, повертається відносно осі 9 власного шарніра бота знаходиться у стані готовності до здійснення і притягується до його повного зчеплення з феронаступного кроку. Перед наступним кроком руху магнітною поверхнею 11, набуваючи ролі робочого колеса-рушія відлік номерів спиць зміщується, притискного магніту. В процесі цього притягнення тобто перша розсувна спиця виключається з відліздійснюється висування рухомого елемента треку, друга розсувна спиця стає першою, третя - друтьої розсувної спиці на необхідну в залежності від гою, а наступна проти напрямку обертання колеса форми феромагнітної поверхні 11 довжину. В по- третьою, і рух колеса здійснюється згідно викладальшому багатоканальний блок керування 4 фоденої вище процедури. Мобільний робот пересурмує на виході IIm другої групи (Фіг.1) сигнал, згідвається по феромагнітній поверхні 11 згідно з поно з яким в обмотку 13 тягового електромагніту передньо запланованою траєкторією. В процесі третьої спиці подається струм, що забезпечує руху мобільного робота багатоканальний блок утворення кінематичного зв'язку між рухомим 7 та керування 4 за допомогою першої групи виходів нерухомим 6 елементами третьої розсувної спиці. забезпечує безперервну одночасну подачу відпоПісля цього багатоканальний блок керування 4 відних струмів регульованої величини, принаймні, одночасно формує на виходах IIm і IIr (Фіг.1) сигв дві обмотки 12 суміжних притискних магнітів 10, нали, згідно з якими регулюється значення струмів а за допомогою другої групи виходів - безперервну у відповідних обмотках 13 тягових електромагнітів почергову подачу струму, принаймні, в одну з обтаким чином, що у першій розсувній спиці (по сигмоток 13 відповідного тягового електромагніту і одночасне регулювання в залежності від режиму налу IIr ) сила кінематичного зв'язку між рухомим 7 руху відповідного колеса-рушія величини та зміни та нерухомим 6 елементами поступово послаблюнапрямку струмів, принаймні, в трьох обмотках 13 ється до мінімального значення, а у третій розсувсуміжних тягових електромагнітів. При технологічній спиці (по сигналу IIm ) - поступово посилюється ній зупинці мобільного робота багатоканальний до максимального значення. Внаслідок цього рублок керування 4 одночасно формує на виходах хомий елемент 7 першої спиці за допомогою власIIn і IIr (Фіг.1) сигнали, згідно з якими значення ного притискного магніту 10 витягується на необструмів у відповідних обмотках 13 тягових електхідну в залежності від форми феромагнітної ромагнітів першої і третьої розсувних спиць встаповерхні 11 довжину, а рухомий елемент 7 третьої новлюються на однаковому рівні, забезпечуючи спиці силою магнітно-керованого кінематичного утримання колеса-рушія в нерухомому стані за зв'язку втягується у нерухомий елемент 6, який рахунок зчеплення усіх трьох робочих притискних при цьому насувається на рухомий елемент 7, магнітів 10 з феромагнітною поверхнею 11. скорочуючи довжину третьої розсувної спиці, тобПозитивний ефект проявляється в тому, що в то довжина першої розсувної спиці збільшується, а порівнянні з пристроєм-прототипом згідно патенту третьої - скорочується. За рахунок жорсткого скріРФ № 2152880 до складу запропоновано пристрою плення нерухомого елемента 6 третьої спиці з введені нові і додаткові конструктивні елементи, маточиною колеса-рушія скорочення третьої спиці вузли та блоки, що дозволяє мобільному роботу призводить до підтягнення маточини 1 разом з здійснювати безперервний рух на феромагнітних оссю 2 колеса у нове кутове просторове положенповерхнях, ускладнених наявністю нерівностей та ня згідно з напрямком обертання колеса, а в репошкоджень і розташованих під будь-яким кутом їх зультаті - до переміщення колеса-рушія на один нахилу до вертикалі. крок. Для переходу до нового кроку руху колеса Нові властивості пристрою розширюють обмобільного робота багатоканальний блок керуванласть застосування мобільних роботів, зокрема ня 4 подає з виходу Ir сигнал на знеструмлення для зачищення та фарбування поверхні корпусів обмотки 12 притискного магніту 10, який знахосуден, для автоматизації процесів пожежогасіння диться на першій з трьох робочих спиць за відліта здійснення рятувальних операцій з суттєвим ком проти напрямку обертання колеса, що на дапідвищенням надійності утримання мобільних роній фазі руху одночасно перебувають у зчепленні з ботів зі спеціальним інструментом та обладнанням феромагнітною поверхнею 11. Внаслідок цього на нахилених феромагнітних поверхнях. зникає раніше сформоване магнітне поле, притискний магніт 10 першої розсувної спиці виходить зі 9 Комп’ютерна верстка Г. Паяльніков 45369 Підписне 10 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPropulsion wheel of mobile robot
Автори англійськоюKondratenko Yurii Panteliiovych, Zaporozhets Yurii Mykhailovych
Назва патенту російськоюКолесо-движитель мобильного робота
Автори російськоюКондратенко Юрий Пантелеевич, Запорожец Юрий Михайлович
МПК / Мітки
МПК: B60B 19/00, B63B 59/00, B60F 3/00
Мітки: колесо-рушій, мобільного, робота
Код посилання
<a href="https://ua.patents.su/5-45369-koleso-rushijj-mobilnogo-robota.html" target="_blank" rel="follow" title="База патентів України">Колесо-рушій мобільного робота</a>
Крокуючий рушій малогабаритного робота

Номер патенту: 75991
Опубліковано: 15.06.2006
Автори: Шевченко Анатолій Іванович, Полівцев Сергій Олександрович
МПК: B62D 57/00, B25J 11/00
Мітки: рушій, малогабаритного, робота, крокуючий
Формула / Реферат:
1. Крокуючий рушій малогабаритного робота, що містить корпус, у якому розташовані рівнобіжні привідні осі, крокуючі стопи, що розташовані на протилежних боках корпуса, який відрізняється тим, що у нього введені перший електродвигун, на валу якого розташований перший редуктор, на виході якого установлена ведуча шестірня, сполучена з веденими шестернями, жорстко з'єднаними з привідними рівнобіжними осями, на кінцях яких розташовані кривошипи,...
Залізничне колесо
Номер патенту: 4136
Опубліковано: 17.01.2005
Автори: Шихов Ромуальд Георгійович, Сібгатулін Олександр Томович, Малиновський Микола Григорович, Очеретяний Віталій Григорович, Кулюкін Сергій Васильович, Кноблох В'ячеслав Ярославович
МПК: B60B 21/00
Мітки: залізничне, колесо
Формула / Реферат:
Залізничне колесо, що має обід та маточину зі шпицями, спряженими з ободом, яке відрізняється тим, що обід має перетинки, розташовані між кожною парою шпиць в місцях їх спряження і з'єднані з ободом.
Колесо автомобільне

Номер патенту: 1000
Опубліковано: 16.07.2001
Автор: Списаренко Борис Дмитрович
Мітки: автомобільне, колесо
Формула / Реферат:
(21) 2001021043(54) (57)Дата прийняттярішення26 березня 2001 р.1. Колесо автомобільне, що містить обід, встановлений на маточині вала, і розташовані на ньому покришку і камеру, яке відрізняється тим, що обід виконаний у вигляді обичайки, сполученої з маточиною вала за допомогою комплектів спиць, причому кожна спиця сполучена з маточиною вала і обичайкою за допомогою шарнірних з'єднань, а покришка виконана у...
Колесо

Номер патенту: 6923
Опубліковано: 16.05.2005
Автори: Омельченко Дмитро Олександрович, Омельченко Юрій Сергійович
МПК: B60B 37/00
Мітки: колесо
Формула / Реферат:
Колесо, що містить диск з ободом та шину, яке відрізняється тим, що обід диска колеса складається з двох елементів, що охоплюють шину, один із яких виконаний за одне ціле з диском, другий – знімний та змонтований разом з шиною.
Кранове колесо

Номер патенту: 35983
Опубліковано: 16.04.2001
Автори: Світличний Олег Володимирович, Герасименко Станіслав Георгійович, Ченський Вадим Вікторович
МПК: B66C 9/00
Формула / Реферат:
1. Кранове колесо, що складає сполучені між собою сферичними поверхнями обід і маточину, зв'язані пружними елементами, яке відрізняється тим, що обід цільний із наскрізними пазами виконаними паралельно його осі, маточина з глухими пазами виконаними з одного боку, пружні елементи являють собою тіла обертання із коаксіальними прорізами.2. Кранове колесо, по п.1 яке відрізняється тим, що пружні елементи зафіксовані кришкою.3....
Попередній патент: Модуль керування комутатором навантажень сонячних батарей
Наступний патент: Спосіб визначення генетичної належності ґрунтів
Випадковий патент: Спосіб дифузійного зварювання у вакуумі через сублімовані прошарки