Пристрій керування продуктивністю формування наноелектронних структур
Номер патенту: 72966
Опубліковано: 10.09.2012
Автори: Ларкін Сергій Юрійович, Золот Анатолій Іванович, Ходаковський Микола Іванович, Новіков Євген Іванович, Галстян Геворк Гакікович
Формула / Реферат
Пристрій керування продуктивністю формування наноелектронних структур, що містить блок керування параметрами, вхід якого є входом пристрою, а вихід якого зв'язаний з входом блока сканування зонда, вихід блока сканування зонда з'єднаний з входом блока реєстрації відхилень зонда, вхід-вихід блока реєстрації відхилень зонда зв'язаний з входом-виходом блока керування параметрами, який відрізняється тим, що містить блок керування скануванням зонда, вхід-вихід якого зв'язаний з входом-виходом блока керування параметрами, а вихід з'єднаний з входом блока сканування зонда, другий вихід блока керування скануванням зонда є виходом пристрою.
Текст
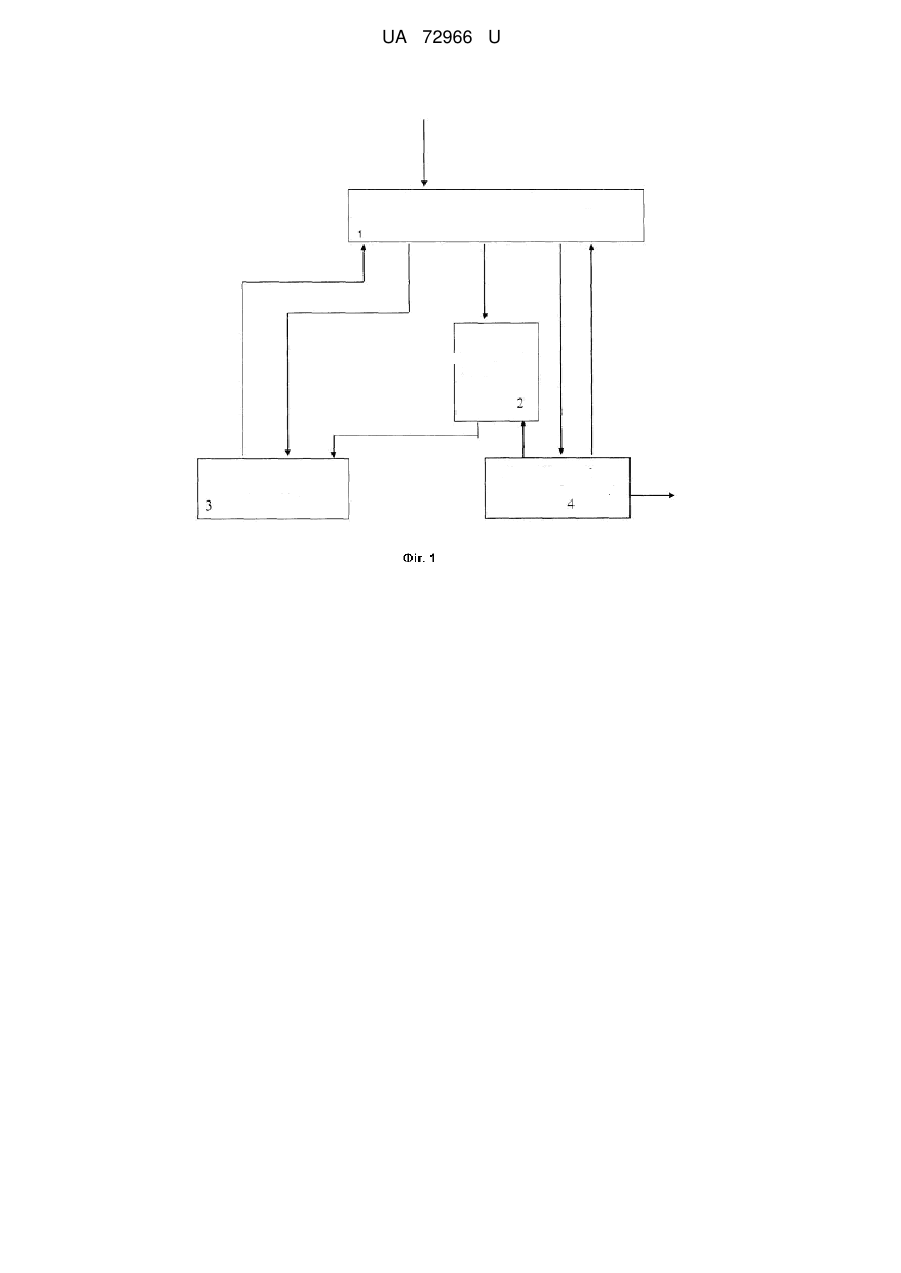
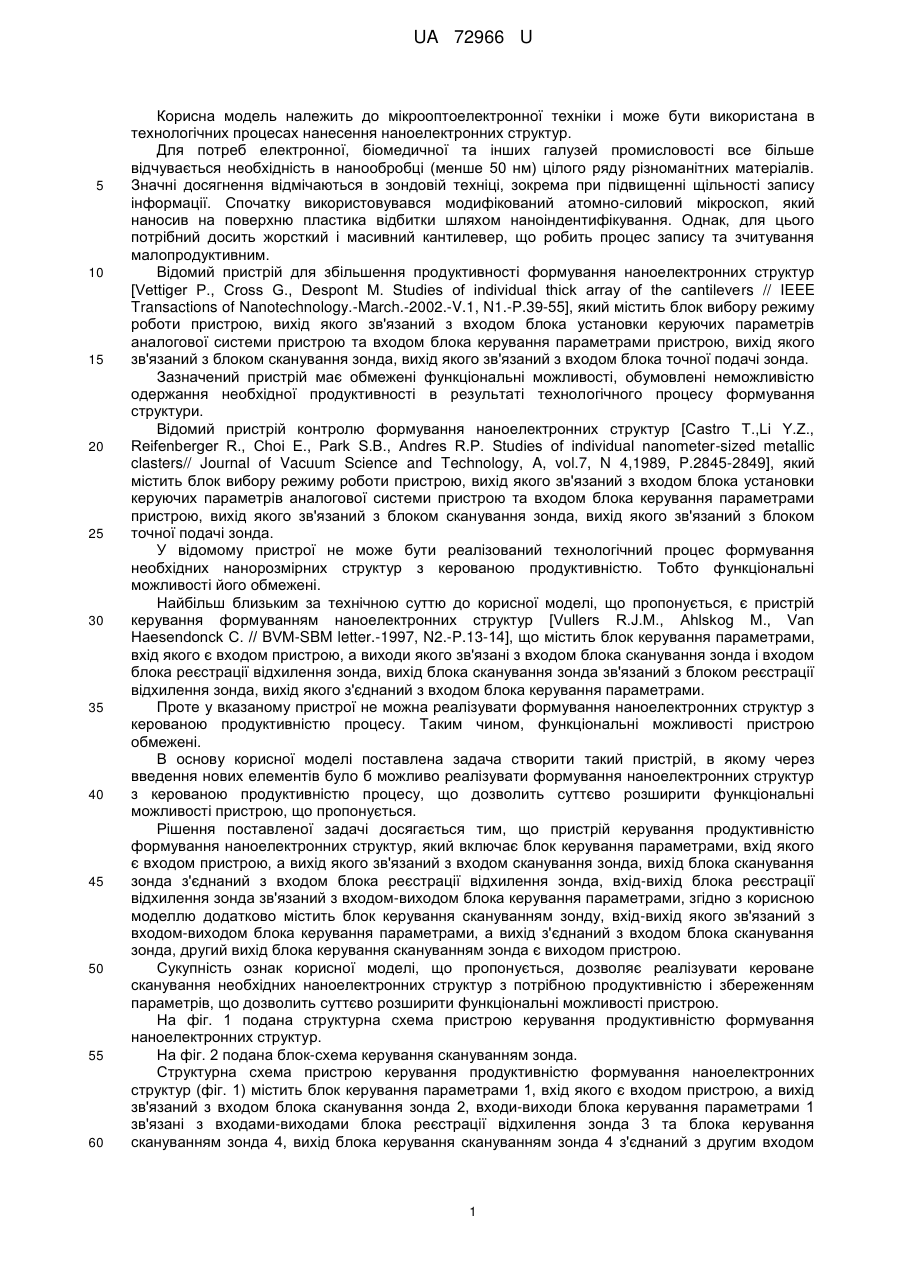
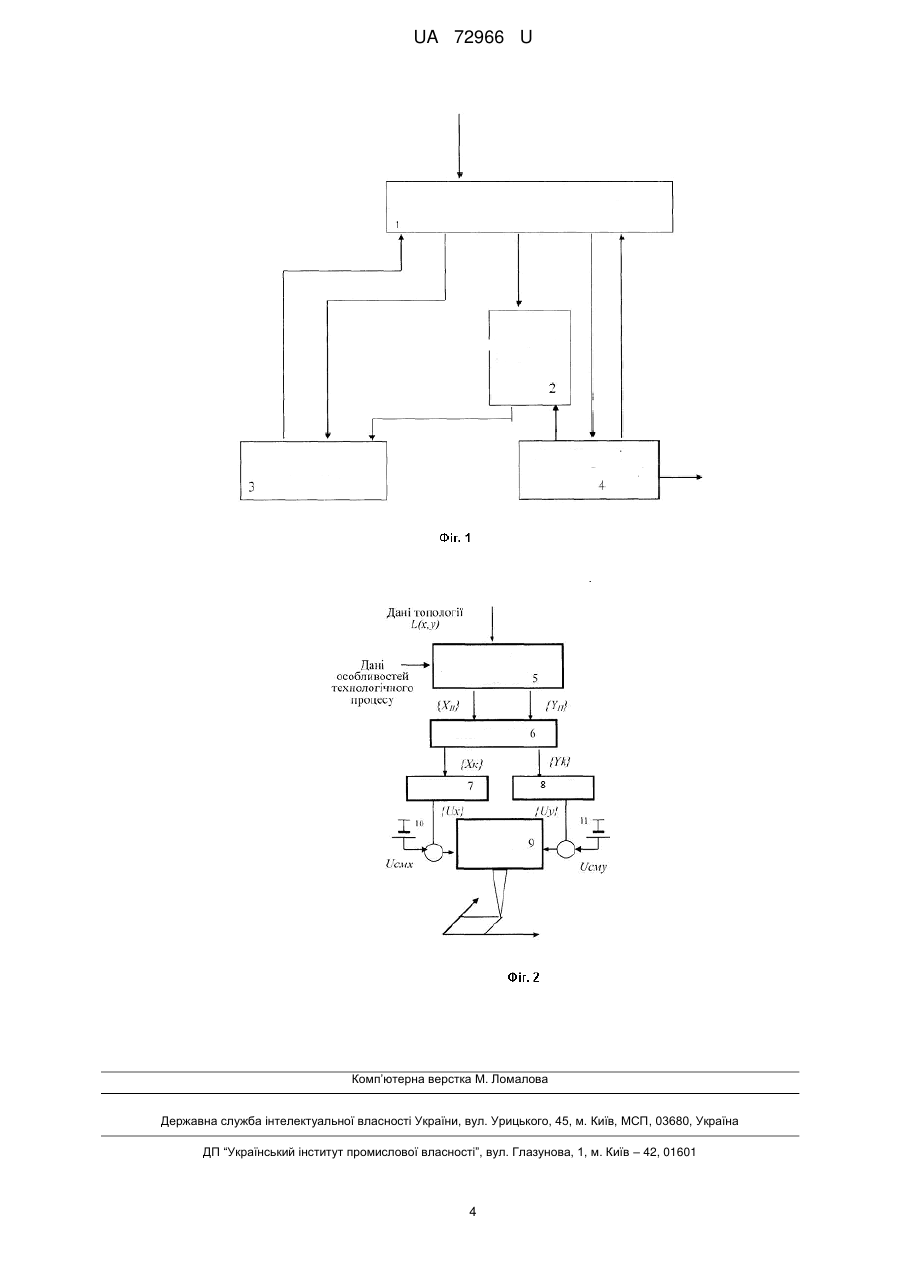
Реферат: Пристрій керування продуктивністю формування наноелектронних структур містить блок керування параметрами, вхід якого є входом пристрою, а вихід якого зв'язаний з входом блока сканування зонда, вихід блока сканування зонда з'єднаний з входом блока реєстрації відхилень зонда, вхід-вихід блока реєстрації відхилень зонда зв'язаний з входом-виходом блока керування параметрами. Пристрій містить блок керування скануванням зонда, вхід-вихід якого зв'язаний з входом-виходом блока керування параметрами, а вихід з'єднаний з входом блока сканування зонда. Другий вихід блока керування скануванням зонда є виходом пристрою. UA 72966 U (12) UA 72966 U UA 72966 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до мікрооптоелектронної техніки і може бути використана в технологічних процесах нанесення наноелектронних структур. Для потреб електронної, біомедичної та інших галузей промисловості все більше відчувається необхідність в нанообробці (менше 50 нм) цілого ряду різноманітних матеріалів. Значні досягнення відмічаються в зондовій техніці, зокрема при підвищенні щільності запису інформації. Спочатку використовувався модифікований атомно-силовий мікроскоп, який наносив на поверхню пластика відбитки шляхом наноіндентифікування. Однак, для цього потрібний досить жорсткий і масивний кантилевер, що робить процес запису та зчитування малопродуктивним. Відомий пристрій для збільшення продуктивності формування наноелектронних структур [Vettiger P., Cross G., Despont Μ. Studies of individual thick array of the cantilevers // IEEE Transactions of Nanotechnology.-March.-2002.-V.1, N1.-P.39-55], який містить блок вибору режиму роботи пристрою, вихід якого зв'язаний з входом блока установки керуючих параметрів аналогової системи пристрою та входом блока керування параметрами пристрою, вихід якого зв'язаний з блоком сканування зонда, вихід якого зв'язаний з входом блока точної подачі зонда. Зазначений пристрій має обмежені функціональні можливості, обумовлені неможливістю одержання необхідної продуктивності в результаті технологічного процесу формування структури. Відомий пристрій контролю формування наноелектронних структур [Castro T.,Li Y.Z., Reifenberger R., Choi E., Park S.В., Andres R.P. Studies of individual nanometer-sized metallic clasters// Journal of Vacuum Science and Technology, A, vol.7, N 4,1989, P.2845-2849], який містить блок вибору режиму роботи пристрою, вихід якого зв'язаний з входом блока установки керуючих параметрів аналогової системи пристрою та входом блока керування параметрами пристрою, вихід якого зв'язаний з блоком сканування зонда, вихід якого зв'язаний з блоком точної подачі зонда. У відомому пристрої не може бути реалізований технологічний процес формування необхідних нанорозмірних структур з керованою продуктивністю. Тобто функціональні можливості його обмежені. Найбільш близьким за технічною суттю до корисної моделі, що пропонується, є пристрій керування формуванням наноелектронних структур [Vullers R.J.M., Ahlskog M., Van Haesendonck С. // BVM-SBM letter.-1997, N2.-P.13-14], що містить блок керування параметрами, вхід якого є входом пристрою, а виходи якого зв'язані з входом блока сканування зонда і входом блока реєстрації відхилення зонда, вихід блока сканування зонда зв'язаний з блоком реєстрації відхилення зонда, вихід якого з'єднаний з входом блока керування параметрами. Проте у вказаному пристрої не можна реалізувати формування наноелектронних структур з керованою продуктивністю процесу. Таким чином, функціональні можливості пристрою обмежені. В основу корисної моделі поставлена задача створити такий пристрій, в якому через введення нових елементів було б можливо реалізувати формування наноелектронних структур з керованою продуктивністю процесу, що дозволить суттєво розширити функціональні можливості пристрою, що пропонується. Рішення поставленої задачі досягається тим, що пристрій керування продуктивністю формування наноелектронних структур, який включає блок керування параметрами, вхід якого є входом пристрою, а вихід якого зв'язаний з входом сканування зонда, вихід блока сканування зонда з'єднаний з входом блока реєстрації відхилення зонда, вхід-вихід блока реєстрації відхилення зонда зв'язаний з входом-виходом блока керування параметрами, згідно з корисною моделлю додатково містить блок керування скануванням зонду, вхід-вихід якого зв'язаний з входом-виходом блока керування параметрами, а вихід з'єднаний з входом блока сканування зонда, другий вихід блока керування скануванням зонда є виходом пристрою. Сукупність ознак корисної моделі, що пропонується, дозволяє реалізувати кероване сканування необхідних наноелектронних структур з потрібною продуктивністю і збереженням параметрів, що дозволить суттєво розширити функціональні можливості пристрою. На фіг. 1 подана структурна схема пристрою керування продуктивністю формування наноелектронних структур. На фіг. 2 подана блок-схема керування скануванням зонда. Структурна схема пристрою керування продуктивністю формування наноелектронних структур (фіг. 1) містить блок керування параметрами 1, вхід якого є входом пристрою, а вихід зв'язаний з входом блока сканування зонда 2, входи-виходи блока керування параметрами 1 зв'язані з входами-виходами блока реєстрації відхилення зонда 3 та блока керування скануванням зонда 4, вихід блока керування скануванням зонда 4 з'єднаний з другим входом 1 UA 72966 U 5 10 15 20 25 30 35 40 45 50 55 60 блока сканування зонда 2, а вихід блока сканування зонда 2 з'єднаний з входом блока реєстрації відхилення зонда 3, другий вихід блока керування сканування зонда 4 є виходом пристрою. Блок керування параметрами 1 складається з двонаправленого конвертора МАХ3340Е, вхідвихід якого з'єднаний з входом-виходом центрального комп'ютера та входом-виходом мікроконтролера ADVC844, що дозволяє здійснювати прийом-передачу інформації з USBсигналів комп'ютера в ТТЛ-рівні мікроконтролера. Блок керування параметрами 1 дозволяє задавати основні режими напруженості електричного поля в області зонда. Блок сканування зонда 2 складається з трьох цифро-аналогових перетворювачів МАХІММАХ521, виходи яких зв'язані з входом вузла біморфних п'єзоманіпуляторів, які забезпечують керування зондом по Χ,Υ,Ζ-координатам. Блок реєстрації відхилення зонда 3 складається з імпульсного діодного лазера ТО-18 650 nm та 4-секційного фотоприймача фірми Certus. Блок керування скануванням зонда 4 складається з мікроконтролера АТМода-32, виходи якого з'єднані з входами двох цифро-аналогових перетворювачів МАХІМ-МАХ521, вихід першого з'єднаний з входом підсилювача напруги, вихід другого з'єднаний з Χ,Υ,Ζкоординатами. Блок керування скануванням зонда 4 (фіг. 2) може бути виконаний таким чином, де 5 - блок формування послідовності прописаних даних відхилення {ΧП,ΥП}, 6 - блок формування корегованих машинних значень відхилення {Χκ,Υκ}, 7, 8 - ЦАПи керуючих напруг, що формують послідовність напруг відхилення {Ux, Uy}, 9 - вузол сканування; 10, 11 - вузли зміщень. Пристрій працює наступним чином. Необхідна інформація про процес нанесення нанорозмірних структур надходить в блок керування параметрами 1, де формується необхідний сигнал, який надходить на вхід блока сканування зонда 2, вхід блока керування скануванням зонда 4 та вхід блока реєстрації відхилення зонда 3. На вхід блока сканування зонда 2 з блока керування параметрами 1 надходить в цифровому вигляді інформація про просторове розташування зонда. Цифровий сигнал перетворюється в аналоговий і подається на зонд для переміщення його по Χ,Υ,Ζкоординатам. На вхід блока керування скануванням зонда 4 з блока керування параметрами 1 надходить в цифровому вигляді інформація про режими технологічного процесу - величину напруги, дані про топологію, полярність напруги, напруженість поля. З блока 4 вказана інформація передається в аналоговому вигляді на вхід блока сканування зонда 2. На вхід блока реєстрації відхилення зонда 3 з блока керування параметрами 1 надходить в аналоговому вигляді інформація про характеристики одержуваних наноструктур завдяки вимірюванням з використанням даних при скануванні зондом одержаних наноструктур. Коригування параметрів наноструктур, що формуються, можна здійснювати завдяки наявності зворотного зв'язку між блоками 3, 4 та блоком керування параметрами 1. Одержана в блоці 4 інформація у цифровому вигляді надходить на вхід блока керування параметрами 1, з допомогою якого виконується також корегування технологічних процесів з метою одержання оптимальних параметрів структур, що виготовляються. Сигнал, що формується в блоці керування параметрами 1 та подається на вхід блоків 2, 3 і 4, визначає параметри переміщення зонда в зоні підкладки по взаємно перпендикулярним Χ,Υ,Ζ-координатам за допомогою трьох біморфних п'єзоманіпуляторів. При формуванні структури виникають характерні перекручування топології у вигляді зсуву відносно розрахункового положення, зміни масштабу, нелінійності відхилення, обертання та ін., які усувалися відповідними методами корекції за рахунок значного зниження продуктивності формування наноелектронних структур. При цьому вплив на підкладку здійснюється за допомогою технологічних середовищ, що формуються в деякому мікрооб'ємі поблизу вістревої структури. Об'єктами технологічного середовища, що впливають на підкладку, можуть бути енергетичний потік (електронів, іонів, фотонів), фізичне поле, а також їхня комбінація. У ряді випадків скорочення тривалості операції досягається переміщенням інструменту тільки в області, у якій потрібний технологічний вплив (так зване векторне сканування). Перетворення масиву "даних еталонного проектування" L(x, y) (мовою опису топології структури) в "вихідні" дані відхилення Lu(x, y) (координат зонда щодо пластини, встановлюваної на рухомому столі), з урахуванням особливостей технологічного процесу, здійснюється відповідним перетворювачем. Другий етап перетворення здійснюється шляхом обрахування неузгодженості між "розрахунковим" і "поточним" положеннями стола і формує "прописані" значення даних про відхилення відповідно до виразу rП = rИ + rнеузгодж. 2 UA 72966 U 5 10 15 20 25 30 де rП, rИ - машинні значення "прописаних" і "вихідних" координат x, y,z відхилення вістревої структури; rнеузгодж. - машинне значення неузгодженості, що вимірюється відповідними датчиками. Цифро-аналогові перетворювачі формують аналогові значення "прописаних" величин відхилення. Вузол сканування звичайно реалізується на основі п'єзоелектричних приводів, які характеризуються нелінійністю, гістерезисом (розходженням величини ходи при прямій і зворотній напрузі) та інерційністю. Досягнення необхідної точності позиціювання вістревої структури при наявності цих факторів також може бути досягнуто введенням відповідної корекції даних керування за допомогою програмно- або апаратно реалізованих засобів. Для експлуатації та розробки нових технологічних систем надто важливо мати вихідні моделі роботи сканувальних систем та визначити загальні методи усунення перекручувань, обумовлені як лінійними й кутовими похибками фіксації пластини на рухомому столі, так й особливостями лінійних і нелінійних елементів системи сканування. Блок керування скануванням зонда 4 (фіг. 2) здійснює визначення перетворень "прописаних" даних відхилення в поточні дані відхилення з урахуванням корекції перекручувань, обумовлених неідеальністю елементів системи сканування, де вузол сканування 9 (разом із ЦАП) забезпечує зміну координат місця впливу інструмента на об'єкт, що виготовляється. При нульовому керуючому сигналі ЦАП координати області сканування визначаються напругою зсуву Uсм. Одним зі способів рішень корекції даних відхилення є урахування реальних характеристик ЦАП та вузла відхилення. Ці характеристики можуть бути обмірювані за допомогою тестових пластин експериментально та записані в блок 4 з метою обчислення машинних значень величини корекції відхилення rкор при робочому скануванні. Тоді значення відхилення r К повинні бути сформовані як rК = rП + rкор. де rП - значення запропонованої величини відхилення. Сучасний рівень нанотехнології дозволяє розробити та побудувати пристрій керування продуктивністю формування наноелектронних структур, що заявляється. Корисна модель, що заявляється, може знайти застосування у мікрооптоелектронній техніці, зокрема в технологічних процесах нанесення наноелектронних структур. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 Пристрій керування продуктивністю формування наноелектронних структур, що містить блок керування параметрами, вхід якого є входом пристрою, а вихід якого зв'язаний з входом блока сканування зонда, вихід блока сканування зонда з'єднаний з входом блока реєстрації відхилень зонда, вхід-вихід блока реєстрації відхилень зонда зв'язаний з входом-виходом блока керування параметрами, який відрізняється тим, що містить блок керування скануванням зонда, вхідвихід якого зв'язаний з входом-виходом блока керування параметрами, а вихід з'єднаний з входом блока сканування зонда, другий вихід блока керування скануванням зонда є виходом пристрою. 3 UA 72966 U Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of productivity of nanoelectronic structure formation
Автори англійськоюKhodakovskyi Mykola Ivanovych, Larkin Serhii Yuriiovych, Zolot Anatolii Ivanovych, Halstian Hevork Hakikovych, Novikov Yevhen Ivanovych
Назва патенту російськоюУстройство управления производительностью формирования наноэлектронных структур
Автори російськоюХодаковский Николай Иванович, Ларкин Сергей Юрьевич, Золот Анатолий Иванович, Галстян Геворк Гакикович, Новиков Евгений Иванович
МПК / Мітки
МПК: H01L 21/00
Мітки: продуктивністю, формування, керування, наноелектронних, пристрій, структур
Код посилання
<a href="https://ua.patents.su/6-72966-pristrijj-keruvannya-produktivnistyu-formuvannya-nanoelektronnikh-struktur.html" target="_blank" rel="follow" title="База патентів України">Пристрій керування продуктивністю формування наноелектронних структур</a>
Пристрій керування формуванням наноелектронних структур
Номер патенту: 90571
Опубліковано: 11.05.2010
Автори: Золот Анатолій Іванович, Ходаковський Микола Іванович, Воронько Андрій Олександрович, Ларкін Сергій Юрійович
МПК: H01L 21/00
Мітки: наноелектронних, пристрій, структур, керування, формуванням
Формула / Реферат:
Пристрій керування формуванням наноелектронних структур, який містить блок керування параметрами пристрою, вхід якого є входом пристрою, а вихід з'єднаний з входом блока керування тунельним струмом, другий вихід блока керування параметрами пристрою з'єднаний з входом блока сканування вістрям структури, вихід блока сканування вістрям структури з'єднаний з входом блока керування тунельним струмом, вихід блока керування тунельним струмом...
Пристрій формування наноелектронних структур
Номер патенту: 58422
Опубліковано: 11.04.2011
Автори: Мержвинський Павло Анатолійович, Золот Анатолій Іванович, Ходаковський Микола Іванович
МПК: H01L 21/268
Мітки: пристрій, наноелектронних, формування, структур
Формула / Реферат:
Пристрій формування наноелектронних структур, що містить блок лазерної системи, оптично зв'язаний через блок оптоволоконного вістря, зразок та діафрагму з фотоприймачем, вихід якого зв'язаний з входом блока оптоволоконного вістря, вхід та вихід якого зв'язаний з відповідним входом та виходом блока вибору режимів роботи, другий вхід-вихід якого зв'язаний з входом-виходом фотоприймача, третій вхід є входом пристрою, який відрізняється тим, що...
Пристрій формування наноелектронних структур
Номер патенту: 98849
Опубліковано: 25.06.2012
Автори: Мержвинський Павло Анатолійович, Золот Анатолій Іванович, Ходаковський Микола Іванович
МПК: H01L 21/268
Мітки: формування, наноелектронних, пристрій, структур
Формула / Реферат:
Пристрій формування наноелектронних структур, який містить блок лазерної системи, оптично зв'язаний через блок оптоволоконного вістря, зразок та діафрагму з фотоприймачем, вихід якого зв'язаний з входом блока оптоволоконного вістря, перші вхід та вихід останнього зв'язані з відповідним входом та виходом блока вибору режимів роботи, другий вхід-вихід якого зв'язаний з входом-виходом фотоприймача, третій вхід блока вибору режимів роботи є...
Пристрій для контролю формування нанорозмірних структур
Номер патенту: 77015
Опубліковано: 16.10.2006
Автори: Мержвинський Павло Анатолійович, Коржинський Федор Йосипович, Шкляр Михайло Петрович, Золот Анатолій Іванович, Ларкін Сергій Юрійович, Ходаковський Микола Іванович
МПК: H01L 21/00
Мітки: формування, структур, нанорозмірних, контролю, пристрій
Формула / Реферат:
Пристрій для контролю формування нанорозмірних структур, який містить блок керування параметрами, вхід якого є входом пристрою, а вихід якого зв'язаний з входом блока подачі вістря, вихід блока подачі вістря з'єднаний з входом блока керування тунельним струмом, вхід-вихід блока керування тунельним струмом зв'язаний з входом-виходом блока керування параметрами, який відрізняється тим, що містить блок керування нанесенням іонів, вхід-вихід...
Пристрій для виготовлення еталонних структур на основі атомно-силової мікроскопії електростатичних сил
Номер патенту: 39552
Опубліковано: 25.02.2009
Автори: Воронько Андрій Олександрович, Золот Анатолій Іванович, Ходаковський Микола Іванович, Ларкін Сергій Юрійович
МПК: H01L 21/00
Мітки: пристрій, сіль, електростатичних, виготовлення, основі, атомно-силової, структур, мікроскопі, еталонних
Формула / Реферат:
Пристрій для виготовлення еталонних структур на основі атомно-силової мікроскопії електростатичних сил, що містить блок керування параметрами, вхід якого є входом пристрою, а вихід зв'язаний з входом блока прецизійного контролю форми верхівки вістря зонда, другий вихід блока керування параметрами зв'язаний з входом блока сканування вістряної структури, вихід блока сканування вістряної структури з'єднаний з входом блока прецизійного контролю...
Попередній патент: Спосіб одержання 1,1′-діетилфероцену як каталізатора швидкості горіння вибухових високоенергетичних композицій
Наступний патент: Замок
Випадковий патент: Ручний підіймач технічного обслуговування сільськогосподарської техніки