Електромеханічний реверсор тяги турбореактивного двигуна з системою автоматичного регулювання стулок
Номер патенту: 81102
Опубліковано: 10.12.2007
Автори: Кольотт Баптіст, Льо Гуеллє Жиль, Мішо Маріон, Йолан Патрік, Круамарі Марк, Курп'є Александр
Формула / Реферат
1. Реверсор тяги для турбореактивного двигуна, що містить дві стулки (10а, 10b), виконані з можливістю переміщення між відкритим і закритим положеннями реверсора тяги, за допомогою щонайменше одного домкрата (12) керування, який містить два електродвигуни (14а, 14b), кожний з яких взаємодіє щонайменше з одним силовим циліндром керування кожною стулкою й управляється електронною коробкою (18а, 18b) керування, зв'язаною з електронним обчислювальним пристроєм (20) керування з повною відповідальністю, і два засоби автоматичного регулювання переміщення кожної стулки за командами задання положення, який відрізняється тим, що засоби автоматичного регулювання містять засоби вирахування зміни сил, що діють на реверсор тяги, і засоби компенсації зазначеної зміни сил, що забезпечують синхронізоване переміщення стулок з урахуванням можливої зміни сил, що діють на реверсор тяги, і можливої розбіжності між силами, що діють на кожну стулку.
2. Реверсор тяги за п. 1, який відрізняється тим, що засоби вирахування зміни сил містять:
засоби (50а, 50b) вирахування похідних за часом швидкостей ![]() обертання кожного з електродвигунів,
обертання кожного з електродвигунів,
засоби (56а, 56b) вирахування похідних за часом струмів (Ia, Ib) збудження, що живлять кожний з електродвигунів,
засоби (58а, 58b) вирахування зміни сил, що діють на реверсор тяги, виходячи з результатів вирахування похідних швидкостей обертання і струмів збудження для кожного з електродвигунів.
3. Реверсор тяги за п. 1 або 2, який відрізняється тим, що засоби компенсації зміни сил, що діють на реверсор тяги, включають засіб (58а, 58b) для впливу на струм збудження кожного з електродвигунів.
4. Реверсор тяги за будь-яким з пп. 1-3, який відрізняється тим, що засоби автоматичного регулювання містять засоби вирахування розбіжності між силами, що діють на кожну стулку, і засоби коригування зазначеної розбіжності між силами.
5. Реверсор тяги за п. 4, який відрізняється тим, що засоби вирахування розбіжності між силами, що діють на кожну стулку, містять:
засоби (56а, 56b) вирахування похідних за часом струмів (Ia, Ib) збудження, що живлять кожний з електродвигунів,
засіб (60) порівняння похідних за часом струмів збудження згаданих електродвигунів, і
засіб (60) вирахування згаданої розбіжності сил на основі порівняння похідних за часом струмів збудження кожного електродвигуна.
6. Реверсор тяги за п. 4 або 5, який відрізняється тим, що засоби коригування розбіжності сил містять засіб (60) для впливу на струм збудження або на швидкість обертання кожного з указаних електродвигунів.
7. Реверсор тяги за будь-яким з пп. 2-6, який відрізняється тим, що засоби автоматичного регулювання містять засоби (48) вимірювання швидкості ![]() обертання кожного з електродвигунів (14а, 14b) і засоби (54) вимірювання струму (Ia, Ib) збудження, що живить кожний зі згаданих електродвигунів.
обертання кожного з електродвигунів (14а, 14b) і засоби (54) вимірювання струму (Ia, Ib) збудження, що живить кожний зі згаданих електродвигунів.
8. Реверсор тяги за будь-яким з пп. 1-7, який відрізняється тим, що засоби автоматичного регулювання додатково містять засоби (44а, 44b, 50a, 50b) для вироблення команди задання швидкості ![]() обертання і команди задання струму (І*а, І*b) збудження для кожного з указаних електродвигунів залежно від неузгодженості між дійсним положенням стулок (10a, 10b) і положенням, заданим обчислювальним пристроєм керування з повною відповідальністю.
обертання і команди задання струму (І*а, І*b) збудження для кожного з указаних електродвигунів залежно від неузгодженості між дійсним положенням стулок (10a, 10b) і положенням, заданим обчислювальним пристроєм керування з повною відповідальністю.
9. Реверсор тяги за п. 8, який відрізняється тим, що засоби автоматичного регулювання додатково містять засоби (42) вимірювання даного положення стулок.
Текст
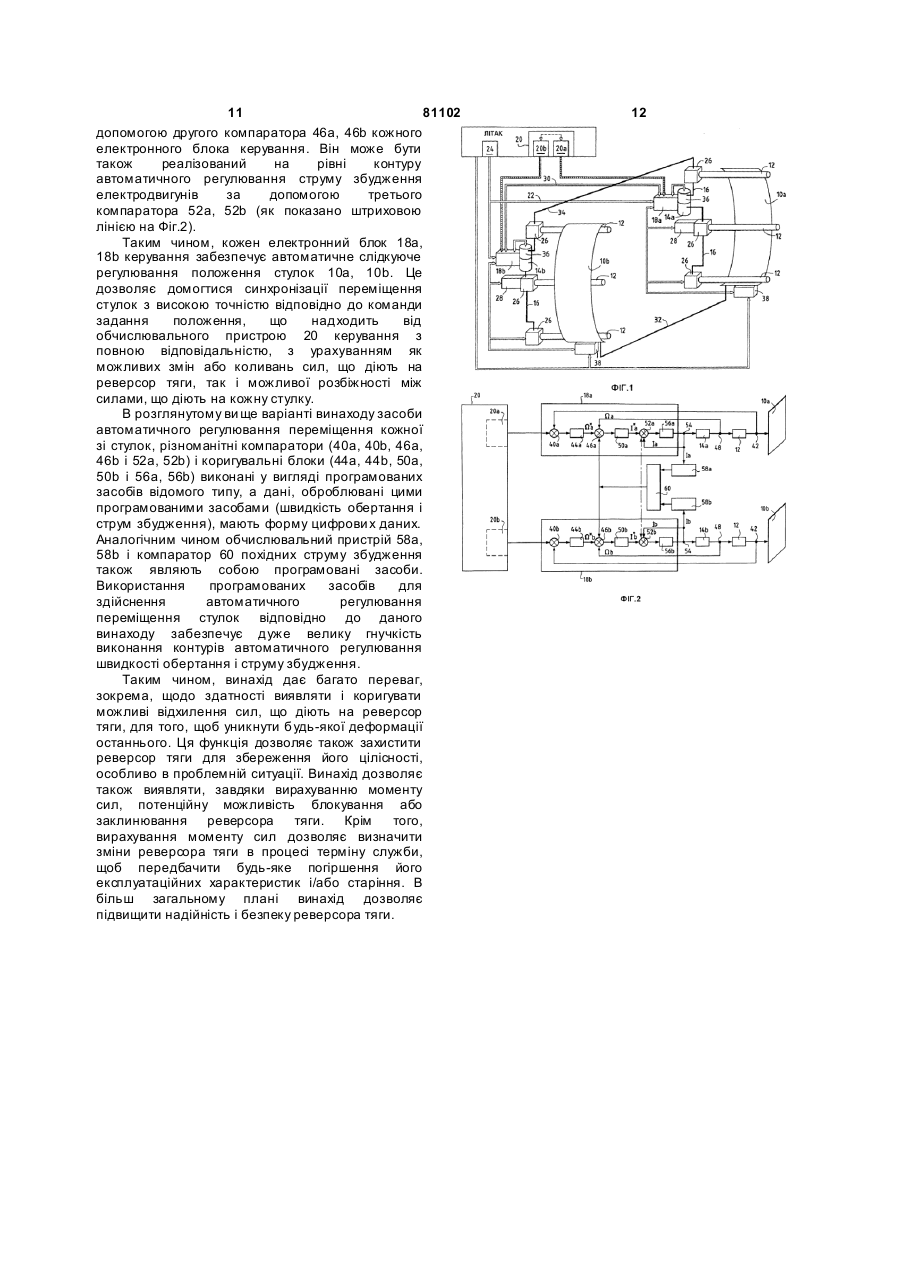
УКРАЇНА (19) UA (11) 81102 (13) C2 (51) МПК F02K 1/76 (2006.01) МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ОПИС ДО ПАТЕНТУ НА ВИНАХІД (54) ЕЛЕКТРОМЕХАНІЧНИЙ РЕВЕРСОР ТЯГИ ТУРБОРЕАКТИВНОГО ДВИГУНА З АВТОМАТИЧНОГО РЕГУЛЮВАННЯ СТУЛОК C2 (13) 81102 вирахування похідних швидкостей обертання і струмів збудження для кожного з електродвигунів. 3. Реверсор тяги за п. 1 або 2, який відрізняється тим, що засоби компенсації зміни сил, що діють на реверсор тяги, включають засіб (58а, 58b) для впливу на струм збудження кожного з електродвигунів. 4. Реверсор тяги за будь-яким з пп. 1-3, який відрізняє ться тим, що засоби автоматичного регулювання містять засоби вирахування розбіжності між силами, що діють на кожну стулку, і засоби коригування зазначеної розбіжності між силами. 5. Реверсор тяги за п. 4, який відрізняється тим, що засоби вирахування розбіжності між силами, що діють на кожну стулку, містять: засоби (56а, 56b) вирахування похідних за часом струмів (Ia, Ib) збудження, що живлять кожний з електродвигунів, засіб (60) порівняння похідних за часом струмів збудження згаданих електродвигунів, і засіб (60) вирахування згаданої розбіжності сил на основі порівняння похідних за часом струмів збудження кожного електродвигуна. 6. Реверсор тяги за п. 4 або 5, який відрізняється тим, що засоби коригування розбіжності сил містять засіб (60) для впливу на струм збудження або на швидкість обертання кожного з указаних електродвигунів. 7. Реверсор тяги за будь-яким з пп. 2-6, який відрізняє ться тим, що засоби автоматичного регулювання містять засоби (48) вимірювання швидкості (W a, Wb ) обертання кожного з електродвигунів (14а, 14b) і засоби (54) вимірювання струму (Ia, Ib) збудження, що живить кожний зі згаданих електродвигунів. 8. Реверсор тяги за будь-яким з пп. 1-7, який відрізняє ться тим, що засоби автоматичного регулювання додатково містять засоби (44а, 44b, 50a, 50b) для вироблення команди задання швидкості (W * a, W * b ) обертання і команди задання струму (І*а, І*b) збудження для кожного з указаних електродвигунів залежно від неузгодженості між дійсним положенням стулок (10a, 10b) і положенням, заданим (11) (21) 2003109603 (22) 24.10.2003 (24) 10.12.2007 (31) 0213403 (32) 25.10.2002 (33) FR (72) КОЛЬОТТ БАПТІСТ, КУРП'Є АЛЕКСАНДР, КРУАМАРІ МАРК, ЙОЛАН ПАТРІК, ЛЬ О ГУЕЛЛЄ ЖИЛЬ, МІШО МАРІОН (73) ІСПАНО-СЮІЗА (56) US 5960626, 05.10.1999 US 4543783, 01.10.1985 EP 1004798, 31.05.2000 US 6439504, 27.08.2002 US 6094908, 01.08.2000 (57) 1. Реверсор тяги для турбореактивного двигуна, що містить дві стулки (10а, 10b), виконані з можливістю переміщення між відкритим і закритим положеннями реверсора тяги, за допомогою щонайменше одного домкрата (12) керування, який містить два електродвигуни (14а, 14b), кожний з яких взаємодіє щонайменше з одним силовим циліндром керування кожною стулкою й управляється електронною коробкою (18а, 18b) керування, зв'язаною з електронним обчислювальним пристроєм (20) керування з повною відповідальністю, і два засоби автоматичного регулювання переміщення кожної стулки за командами задання положення, який відрізняє ться тим, що засоби автоматичного регулювання містять засоби вирахування зміни сил, що діють на реверсор тяги, і засоби компенсації зазначеної зміни сил, що забезпечують синхронізоване переміщення стулок з урахуванням можливої зміни сил, що діють на реверсор тяги, і можливої розбіжності між силами, що діють на кожну стулку. 2. Реверсор тяги за п. 1, який відрізняється тим, що засоби вирахування зміни сил містять: засоби (50а, 50b) вирахування похідних за часом швидкостей (W a, Wb ) обертання кожного з електродвигунів, засоби (56а, 56b) вирахування похідних за часом струмів (Ia, Ib) збудження, що живлять кожний з електродвигунів, засоби (58а, 58b) вирахування зміни сил, що діють на реверсор тяги, виходячи з результатів 2 UA 1 СИСТЕМОЮ (19) ДЕРЖАВНИЙ Д ЕПАРТАМЕНТ ІНТЕЛ ЕКТУАЛЬНОЇ ВЛАСНОСТІ 3 81102 обчислювальним пристроєм керування з повною містять засоби відповідальністю. положення 9. Реверсор тяги за п. 8, який відрізняється тим, що засоби автоматичного регулювання додатково Даний винахід відноситься до реверсорів тяги в турбореактивному двигуні з потоками первинного і вторинного повітря. У більш вузькому аспекті винахід відноситься до електромеханічного реверсора тяги, що містить, щонайменше, два переміщуваних елементи, які у відкритому положенні реверсора взаємодіють для створення тяги реверса. Реверсор тяги за винаходом може бути ґратчастим, стулчастим або ківшевим. Реверсори тяги, якими оснащуються турбореактивні двигуни, що використовують потоки первинного і вторинного повітря, добре відомі в авіації. Вони служать для підвищення безпеки літака шляхом створення сили гальмування під час його приземлення. Реверсори тяги звичайно виконані у ви гляді, щонайменше, двох р ухливих елементів, як-от ковзні стулки, які можуть переміщуватися щодо капота турбореактивного двигуна за допомогою домкратів керування таким чином, щоб при роботі в режимі реверса тяги, тобто у відкритому положенні, утворювати перешкоду для частини потоку газів, що виходять з турбореактивного двигуна, спрямовуючи його вперед таким чином, щоб створювати для літака негативну тягу реверса. Переміщення ковзних стулок зазвичай забезпечується гідравлічною системою керування. Така система керування містить у якості основних компонентів гідроциліндри керування стулками реверсора тяги, гідравлічний блок керування для подання гідравлічної рідини під тиском у порожнини гідроциліндрів керування і гідравлічні лінії зв'язку. Гідравлічна потужність, необхідна для живлення системи керування цього типу, відбирається безпосередньо від гідравлічної системи літака. В ході відкриття і закриття реверсора тяги обов'язковою умовою є синхронізоване переміщення стулок. Справді, несинхронне переміщення стулок призводить до створення підвищених динамічних напруг на рівні реверсора тяги, які можуть викликати серйозні ушкодження реверсора тяги і турбореактивного двигуна. Погана синхронізація переміщення стулок викликає нерівномірний розподіл зусиль, що прикладаються до стулок, що призводить до значної розбіжності між їхніми положеннями. Крім того, можлива ситуація, коли на стулки діють різноманітні сили. В цьому випадку можливий ризик деформації та пошкодження реверсора тяги. Для забезпечення можливості виявлення такої зміни в часі сил, що діють на реверсор тяги з гідравлічним керуванням, і появи розбіжності між силами, що діють на кожну стулку, відоме оснащення гідроциліндрів керування датчиками, що вимірюють тиск гідравлічної рідини в порожнинах гідроциліндрів. При цьому за допомогою порівняння значень тиску, виміряних (42) 4 вимірювання даного стулок. цими датчиками, можна виявляти тимчасові зміни сил, що діють на реверсор тяги, і можливу розбіжність між силами, що діють на кожну стулку, для того, щоб уникнути будь-якої деформації реверсора тяги, яка призводить до розбіжності між положеннями стулок. Для реверсорів тяги, що використовують технологію гідравлічного керування, характерні незручності, пов'язані зі складністю і громіздкістю виконання різноманітних гідравлічних систем. Справді, прокладка гідравлічних зв'язків системи є складною й тонкою операцією в умовах обмеженого простору, що є на передній рамі реверсора тяги. Інша незручність цієї технології полягає у використанні гідравлічної рідини, небезпечної у відношенні корозійних властивостей і запалювання. Крім того, використання датчиків тиску для виявлення і коригування з метою усунення можливого блокування або заклинювання стулок не дозволяє відслідковувати еволюційні зміни реверсора тяги в процесі експлуатації з тим, щоб передбачати будь-яке погіршення його характеристик і/або старіння. Л Найближчим аналогом є патент [US 5960626 чи US6439504] (див. формулу винаходу). Задача, на вирішення якої спрямований даний винахід, полягає в усуненні зазначених вад за рахунок створення менш громіздкого електромеханічного реверсора тяги, який дозволяє одночасно виявляти і виконувати коригування у відношенні можливої зміни сил, що діють на реверсор тяги, і можливої розбіжності між силами, що діють на кожну стулку, для досягнення синхронізації їхнього переміщення з високою точністю. Відповідно до винаходу для вирішення поставленої задачі пропонується реверсор тяги для турбореактивного двигуна, що містить дві стулки, виконані з можливістю переміщення між положеннями, що відповідають відкритому і закритому положенням реверсора тяги, за допомогою, щонайменше, одного силового циліндра керування. Реверсор за винаходом характеризується тим, що додатково містить два електродвигуни, кожен з яких взаємодіє, щонайменше, з одним силовим циліндром керування кожною стулкою й управляється електронним блоком керування, зв'язаного з електронним обчислювальним пристроєм керування з повною відповідальністю. Реверсор містить також два засоби автоматичного регулювання переміщення кожної стулки за командами задання положення, що забезпечують синхронізоване переміщення зазначених стулок з урахуванням можливої зміни сил, що діють на реверсор тяги, і можливої розбіжності між силами, що діють на кожну стулку. 5 81102 6 Засоби автоматичного регулювання Крім того, реверсор тяги містить два переважно містять засоби вираховування зміни електродвигуни 14а, 14b, кожний з яких управляє сил, що діють на реверсор тяги, і засоби переміщенням однієї стулки. Ці електродвигуни компенсації цієї зміни сил. Переважно засоби зв'язані з силовими циліндрами 12 керування вираховування зміни сил містять засоби кожною стулкою 10а, 10b за допомогою вираховування похідних за часом швидкостей передатних валів 16, що зв'язують між собою обертання кожного з електродвигунів, засоби силові циліндри керування кожною стулкою. вираховування похідних за часом струмів Кожний електродвигун 14а, 14b установлений збудження, що живлять кожний з електродвигунів, безпосередньо на електронному блоку 18а, 18b і засіб вираховування зміни сил, що діють на керування, яка управляє всією послідовністю реверсор тяги, ви ходячи з результатів переміщення двох стулок і регулює швидкість вираховування похідних швидкостей обертання і обертання електродвигуна. Кожен електронний струмів збудження для кожного з указаних блок 18а, 18b керування має електричний зв'язок з електродвигунів. одним із двох каналів 20а, 20b зв'язку Таким чином, засоби автоматичного електронного обчислювального пристрою 20 регулювання за винаходом дозволяють виявляти керування з повною відповідальністю, відомого за можливі зміни сил, що діють на реверсор тяги, і назвою FADEC (Full Authority Digital Engine компенсувати ці зміни. Коли така зміна виявлена, Control). Порядок висування або втягування винахід дозволяє компенсувати її для того, щоб реверсора тяги передається обчислювальним здійснити регулювання швидкості переміщення пристроєм FADEC електронним блокам 18а, 18b стулок. Ця компенсація здійснюється за керування. Можливий також варіант, коли допомогою впливу на струм збудження кожного з електронні блоки 18а, 18b керування вмонтовані в електродвигунів з урахуванням результату обчислювальний пристрій FADEC. розрахунку зміни сил. Електроживлення електронних блоків 18а, 18b У той же час засоби автоматичного керування здійснюється по електричній шині 22, регулювання переважно містять засоби під'єднаній до електричної мережі 24 літака, на вираховування розбіжності між силами, що діють якому встановлений турбореактивний двигун. на кожну стулку, і засоби коригування згаданої Електронні блоки керування перетворюють розбіжності між силами. Вираховування електричний сигнал, адаптуючи його для розбіжності між силами здійснюється на основі живлення електродвигунів 14а, 14b. порівняння похідних за часом струмів збудження Силові циліндри 12 керування стулками кожного з електродвигунів. реверсора тяги є силового циліндрами Таким чином, засоби автоматичного електромеханічного типу. Вони приводяться в дію регулювання за винаходом дозволяють також коробками 26 передач, установленими на кожному виявляти можливу розбіжність між силами, що силовому циліндрі. Закон керування (за швидкістю діють на кожну стулку реверсора тяги для або у двійковому режимі "увімкнено-вимкнено") синхронізації переміщення стулок. Справді, стулками 10а, 10b реверсора тяги передається від розбіжність між зазначеними силами може електронних блоків керування на кожний силовий викликати ризик деформації, а отже, і циліндр 12 керування за допомогою пошкодження реверсора тяги. Засоби електродвигунів 14а, 14b, передатних валів 16 і автоматичного регулювання дозволяють коробок 26 передач (називаних також привідними коригувати таку розбіжність шляхом впливу або на коробками). струм збудження, або на швидкість обертання Для забезпечення можливості ручного кожного з електродвигунів. керування стулкою, зв'язаною з силовим Інші властивості й переваги даного винаходу циліндром керування, зокрема, під час операцій з стануть ясні з нижченаведеного опису, що містить технічного обслуговування реверсора тяги, на посилання на додані креслення, які ілюструють рівні одного із силових циліндрів 12 керування приклад здійснення винаходу, що не вносить може бути передбачено привідний пристрій 28. У жодних обмежень. На кресленнях: показаному на Фіг.1 прикладі виконання Фіг.1 являє собою схему, що ілюстр ує приклад центральний силовий циліндр 12 керування виконання реверсора тяги за винаходом, оснащений таким привідним пристроєм 28 на рівні Фіг.2 являє собою часткову функціональну своєї привідної коробки 26. Оскільки коробки схему реверсора тяги в прикладі виконання за передач (привідні коробки) кожної стулки зв'язані Фіг.1. між собою, цей привідний пристрій дозволяє Приклад виконання реверсора тяги відповідно оператору з обслуговування здійснювати до винаходу показаний на Фіг.1. керування відкриттям і/або закриттям стулок Реверсор тяги містить дві стулки 10а, 10b, реверсора тяги, наприклад, за допомогою однієї кожна з яких може переміщуватися між відкритим і рукоятки. Доступ до привідного пристрою 28 закритим положеннями за допомогою, кожної стулки може бути електрично зв'язаний з щонайменше, одного силового циліндра 12 електронним блоком 18а, 18b керування таким керування (на Фіг.1 поданий варіант з трьома чином, щоб переривати електроживлення під час силовими циліндрами керування: один операцій з обслуговування з тим, щоб уникнути центральний силовий циліндр і два силових будь-якого ризику невчасного висування циліндра, розташовані на двох бічних краях кожної реверсора тяги. стулки). Крім того, електронні блоки 18а, 18b керування можуть обмінюватися даними між 7 81102 8 собою по лінії 30 електричного зв'язку типу шини. подолання цих сил, не є постійним у ході Цей обмін даними між двома електронними переміщення стулок. Ці сили, що діють на блоками керування дозволяє, зокрема, реверсор тяги, включають, зокрема, аеродинамічні забезпечити порівняння інформації про поточні сили, сили тертя і сили, обумовлені можливим положення двох стулок. Для полегшення поступовим погіршенням характеристик реверсора синхронізації переміщення двох стулок можуть тяги. Засоби автоматичного регулювання за бути передбачені механічний зв'язок 32 між двома винаходом дозволяють виявляти можливе стулками 10а, 10b і гнучкий вал 34 синхронізації, коливання цих сил і за наявності такого коливання що з'єднує між собою силові циліндри кожної компенсувати його. З урахуванням того, що стулки. крутний момент, що розвивається кожним Реверсор тяги містить три рівні фіксації, що електродвигуном, пропорційний до його струму дозволяє забезпечувати незалежне утримання збудження, засоби автоматичного регулювання реверсора тяги. впливають на струм збудження в ланцюзі Перший рівень фіксації виконується автоматичного регулювання (як це механічним фіксуючим пристроєм 36, називаним описуватиметься докладно далі з посиланням на первинним фіксатором, який зв'язаний із кожною Фіг.2) для подолання сил, що діють на реверсор стулкою реверсора тяги. Кожний первинний тяги. фіксатор установлений безпосередньо на Електронний обчислювальний пристрій 20 електродвигуні 14а, 14b. Ці первинні фіксатори 36 керування з повною відповідальністю подає дозволяють забезпечувати незалежну фіксацію команду відкриття або закриття реверсора тяги по стулок, з якими вони зв'язані. Як приклад, вони ланцюзі автоматичного регулювання. Коли ця можуть бути виконані у вигляді дискового гальма команда (тобто команда задання положення) або блокувального пристрою, що перешкоджає отримана, перший компаратор 40а, 40b, яким руху передатного вала. оснащений кожен електронний блок 18а, 18b З урахуванням того, що дві стулки зв'язані керування, аналізує неузгодженість між механічно за допомогою зв'язків 32 і 34, первинний положенням, заданим пристроєм 20 FADEC, і фіксатор 36 однієї зі стулок відповідає другому поточним (дійсним) положенням кожної стулки. рівню фіксації для іншої стулки, для якої він Дійсне положення кожної стулки вимірюється, відповідно утворює вторинний фіксатор. наприклад, датчиком 42 положення, Вторинний фіксатор призначений для розташованим на виході одного з двох силовий обслуговування відповідної стулки у випадку циліндрів 12 приводу стулки. відмови первинного фіксатора. Таким чином, якщо Кожен електронний блок 18а, 18b керування фіксатор однієї зі стулок розглядати як первинний містить перший коригувальний блок 44а, 44b, який фіксатор, фіксатор іншої стулки може подає команду задання швидкості W*a, W*b розглядатися як вторинний фіксатор, і навпаки. обертання для кожного електродвигуна 14а, 14b, Третій рівень фіксації забезпечується упорним якщо існує неузгодженість між заданим фіксатором 38 (див. Фіг.1), називаним третинним положенням і виміряним положенням кожної фіксатором, який розташований на бічному краї стулки реверсора тяги. кожної стулки 10а, 10b або однієї стулки. Ці За першим коригувальним блоком у ланцюзі третинні фіксатори можуть бути зв'язані з автоматичного регулювання розташований другий електронними блоками 18а, 18b керування, з компаратор 46а, 46b, який дозволяє порівняти для обчислювальним пристроєм 20 FADEC і/або кожного електродвигуна 14а, 14b задану швидкість безпосередньо з кабіною літака, з тим, щоб W*a, W*b обертання, вироблену першим забезпечувати достатню безпеку функціонування коригувальним блоком 44а, 44b, і дійсну швидкість в різноманітних типових ситуаціях. Справді, бувши Wa, Wb обертання, виміряну на рівні осі обертання зв'язаними з пристроєм FADEC або з кабіною електродвигуна 14а, 14b. Вимірювання швидкості літака, третинні фіксатори залишаються діючими Wa, Wb обертання кожного електродвигуна 14а, навіть у випадку відмови електронних блоків 18а, 14b здійснюється датчиком типу "резольвера" 18b керування. Вони дозволяють здійснити (resolver) (датчиком обертання) 48 або, наприклад, керування стулками реверсора тяги у випадку акустичним датчиком. відмови первинного і вторинного фіксаторів. Коли є неузгодженість між заданою швидкістю Крім того, реверсор тяги за винаходом містить W*a, W*b обертання й виміряною швидкістю Wa, Wb засоби автоматичного регулювання переміщення обертання кожного електродвигуна, др угий кожної зі стулок 10а, 10b по командах задання коригувальний блок 50а, 50b дозволяє вирахува ти попередньо визначених положень. Ці засоби похідну за часом виміряної швидкості обертання автоматичного регулювання дозволяють для кожного двигуна. Ця похідна швидкості забезпечувати синхронізоване переміщення обертання використовуватиметься для стулок з урахуванням як можливого коливання або вираховування можливого коливання моменту зміни в часі сил, які діють на реверсор тяги і сил, що діють на реверсор тяги. сприймаються індивідуально на рівні кожної Крім того, кожний другий коригувальний блок стулки, так і можливої розбіжності між цими 50а, 50b виробляє команду задання струму І*а, І*b силами, що може існувати між двома стулками. збудження живлення кожного електродвигуна 14а, Сили, що діють на реверсор тяги, змінюються 14b, коли існує неузгодженість між заданим протягом усього процесу висування або положенням, отриманим від пристрою 20 FADEC, і втягування його стулок, так що крутний момент, виміряним положенням кожної стулки реверсора що розвивається кожним електродвигуном для тяги. 9 81102 10 За другим коригувальним блоком 50а, 50b у З іншого боку, засоби автоматичного ланцюзі автоматичного регулювання регулювання переміщення стулок реверсора тяги встановлений третій компаратор 52а, 52b, який відповідно до винаходу дозволяють виявити і дозволяє порівняти для кожного електродвигуна скорегувати можливу розбіжність між силами, що 14а, 14b заданий струм І*а, І*b збудження, діють на кожну стулк у. Така розбіжність може визначений описаним чином, і виміряний струм la, реально існувати на практиці. В цьому випадку Ib збудження, який живить електродвигуни. Струм сили, що діють на дві стулки, різні, що пов'язано з la, Ib збудження вимірюється на вході кожного ризиком деформації, а отже, й пошкодження електродвигуна. Як приклад засобів вимірювання реверсора тяги. Внаслідок цього важливо струму можуть служити електровимірювальні кліщі порівняти струми la, Ib збудження, що живлять 54. кожний електродвигун 14а, 14b, для того, щоб Коли існує неузгодженість між заданим модифікувати команду задання швидкості W*a, W*b струмом І*а, І*b збудження й виміряним струмом обертання або команду задання струму І*а, І*b Іа, Іb збудження, третій коригувальний блок 56а, збудження, подавану на один з цих двигунів для 56b дозволяє вирахувати для кожного його уповільнення (або прискорення). В результаті електродвигуна похідну за часом виміряного цієї дії розбіжність між положеннями двох стулок струму збудження. буде зменшена; тим самим буде полегшена На основі зміни або коливання струму синхронізація переміщення стулок і знижений збудження можна вирахувати можливу зміну або ризик деформації реверсора тяги. коливання моменту сил, що діють на реверсор Виходячи з рівняння (2) і знаючи, що крутний тяги. момент (Гmoteur), що розвивається кожним Справді, відомо, що: електродвигуном, пропорційний до струму (1) Гmoteur=J´(dW/dt)+Γresist збудження (тобто І=k´Гmoteur), можна показати, де: Гmoteur - крутний момент, що що похідна за часом струму збудження для розвивається кожним електродвигуном; кожного електродвигуна записується рівнянням: J - константа, що відповідає механічній інерції (3) dl/dt=k´ëJ´(d2W/dt2)+( Γresist/dt)û реверсора тяги в цілому; Крім того, за умови, що для забезпечення (dW/dt - похідна за часом швидкості обертання синхронізації переміщення стулок реверсора тяги для кожного електродвигуна, два електродвигуни 14а, 14b обертаються, по суті, Γresist - момент сил, що діють на реверсор з однаковою швидкістю, можна вивести таке тяги. співвідношення: Таким чином, шляхом вираховування похідної (4) k´ëJ´(d2Wa/dt2)û»k´ëJ´(d2Wb/dt2)û за часом членів рівняння (1) за допомогою Отже, при порівнянні похідних струм у обчислювального пристрою 58а, 58b можна збудження для кожного електродвигуна з рівнянь вирахувати можливу зміну або коливання моменту (3) і (4) одержуємо: сил, що діють на реверсор тяги (цей момент сил (dl/dt)a-(dl/dt)b»k´ë(dΓresist/dt)a-(dΓresist/dt)bû відповідає dΓresist/dt). Одержання похідних за де через (dΓresist/dt)a і (dΓresist/dt)b позначені часом у рівнянні (1) записується в такий спосіб: зміни сил, що діють на кожну стулк у реверсора (2) dГmoteur/dt =J´(d2W/dt2)+(dΓresist/dt) тяги. де: Подібним чином, за допомогою порівняння похідна (dГmoteur/dt) крутного моменту, що похідних струм у збудження для кожного розвивається кожним електродвигуном 14а, 14b, електродвигуна, визначають можливу розбіжність пропорційна до похідної виміряного струму Іа, Іb між силами, що діють на кожну стулку реверсора збудження, який живить відповідний тяги. Таким чином, з'я вляється можливість електродвигун (вирахо вування похідної цих виявити ситуацію, коли на стулки діють струмів здійснюється третім коригувальним різноманітні сили. Вирахування кожної похідної блоком 56а, 56b); струму збудження виконується третім механічна інерція J реверсора тяги є коригувальним блоком 56а, 56b кожного попередньо визначеною константою, електронного блоку 18а, 18b керування, а їхнє прискорення (dW/dt електродвигунів отримане порівняння здійснюється на рівні компаратора 60. шляхом вирахування похідної швидкості Після виявлення згаданим чином розбіжності обертання, виконуваного другим коригувальним між силами, що діють на кожну стулку, необхідно блоком 50а, 50b. здійснити бажаний коригувальний вплив щодо Після вираховування згаданим чином моменту однієї або двох стулок. Так, наприклад, сил, що діють на реверсор тяги, необхідно коригувальний вплив може виражатися або у забезпечити, щоб електродвигун 14а, 14b кожної повній зупинці системи реверсора тяги, або у стулки розвив крутний момент для подолання цих поверненні стулок назад, або у зворотному сил. Оскільки крутний момент електродвигуна відведенні стулок на декілька сантиметрів і потім пропорційний до струму збудження, що його повторному їхньому переміщенні в первинному живить, розвиток двигуном крутного моменту для бажаному напрямку. Вибір конкретного подолання цих сил здійснюється простим коригувального впливу залежить від фахівця з коригувальним впливом на струм збудження. Цей конструкції капотів. Може бути також продовжене вплив, інтенсивність якого вираховується переміщення стулок у переривчастому режимі. обчислювальним пристроєм 58а, 58b, передається Коригувальний вплив може бути реалізований на рівень третього компаратора 52а, 52b кожного на рівні контуру автоматичного регулювання електронного блоку 18а, 18b керування. швидкості обертання електродвигунів за 11 81102 допомогою другого компаратора 46а, 46b кожного електронного блока керування. Він може бути також реалізований на рівні контуру автоматичного регулювання струму збудження електродвигунів за допомогою третього компаратора 52а, 52b (як показано штриховою лінією на Фіг.2). Таким чином, кожен електронний блок 18а, 18b керування забезпечує автоматичне слідкуюче регулювання положення стулок 10а, 10b. Це дозволяє домогтися синхронізації переміщення стулок з високою точністю відповідно до команди задання положення, що надходить від обчислювального пристрою 20 керування з повною відповідальністю, з урахуванням як можливих змін або коливань сил, що діють на реверсор тяги, так і можливої розбіжності між силами, що діють на кожну стулку. В розглянутому ви ще варіанті винаходу засоби автоматичного регулювання переміщення кожної зі стулок, різноманітні компаратори (40а, 40b, 46a, 46b і 52a, 52b) і коригувальні блоки (44a, 44b, 50a, 50b і 56a, 56b) виконані у вигляді програмованих засобів відомого типу, а дані, оброблювані цими програмованими засобами (швидкість обертання і струм збудження), мають форму цифрови х даних. Аналогічним чином обчислювальний пристрій 58а, 58b і компаратор 60 похідних струму збудження також являють собою програмовані засоби. Використання програмованих засобів для здійснення автоматичного регулювання переміщення стулок відповідно до даного винаходу забезпечує дуже велику гнучкість виконання контурів автоматичного регулювання швидкості обертання і струму збудження. Таким чином, винахід дає багато переваг, зокрема, щодо здатності виявляти і коригувати можливі відхилення сил, що діють на реверсор тяги, для того, щоб уникнути будь-якої деформації останнього. Ця функція дозволяє також захистити реверсор тяги для збереження його цілісності, особливо в проблемній ситуації. Винахід дозволяє також виявляти, завдяки вирахуванню моменту сил, потенційну можливість блокування або заклинювання реверсора тяги. Крім того, вирахування моменту сил дозволяє визначити зміни реверсора тяги в процесі терміну служби, щоб передбачити будь-яке погіршення його експлуатаційних характеристик і/або старіння. В більш загальному плані винахід дозволяє підвищити надійність і безпеку реверсора тяги. 12
ДивитисяДодаткова інформація
Назва патенту англійськоюNormal;heading 1;heading 2;turbojet electromechanical thrust reverser with servo-controlled door displacement
Автори англійськоюCOLOTTE BAPTISTE, COURPIED ALEXANDRE, CROIXMARIE MARC, JOLAND PATRICK RENE DENIS, LE GOUELLEC GILLES, MICHAU MARION
Назва патенту російськоюЭлектромеханический реверсор тяги турбореактивного двигателя с системой автоматической регулировки створок
Автори російськоюКольотт Баптист, Курпье Александр, Круамари Марк, Йолан Патрик, Льо Гуелле Жиль, Мишо Марион
МПК / Мітки
МПК: F02K 1/76
Мітки: турбореактивного, двигуна, тяги, реверсор, електромеханічний, регулювання, стулок, системою, автоматичного
Код посилання
<a href="https://ua.patents.su/6-81102-elektromekhanichnijj-reversor-tyagi-turboreaktivnogo-dviguna-z-sistemoyu-avtomatichnogo-regulyuvannya-stulok.html" target="_blank" rel="follow" title="База патентів України">Електромеханічний реверсор тяги турбореактивного двигуна з системою автоматичного регулювання стулок</a>
Реверсор тяги для авіаційного турбореактивного двигуна
Номер патенту: 80941
Опубліковано: 26.11.2007
Автори: Круамарі Марк, Йолан Патрік, Мішо Маріон, Кольотт Баптіст, Курп'є Александр, Льо Гуеллє Жиль
МПК: F02K 1/56
Мітки: реверсор, авіаційного, турбореактивного, двигуна, тяги
Формула / Реферат:
1. Реверсор тяги для авіаційного турбореактивного двигуна, що містить: дві стулки (10а, 10b), виконані з можливістю переміщення між відкритим і закритим положеннями реверсора тяги, причому кожна із вказаних стулок керується електронною коробкою (18а, 18b) керування, і щонайменше один датчик (40, 42, 43) на кожну стулку, що вимірює принаймні одну характеристику положення зазначеної стулки і зв'язаний з електронною коробкою керування, яка керує...
Реверсор тяги турбоактивного двигуна, що має кромку зміни напряму, із кривизною, яка змінюється
Номер патенту: 26446
Опубліковано: 30.08.1999
Автори: Карималі Фелікс, Легра Мішель Жан Люсьен
МПК: F02K 1/56, F02K 1/60, F02K 1/70
Мітки: тяги, кривизною, зміни, двигуна, яка, змінюється, має, напряму, кромку, реверсор, турбоактивного
Формула / Реферат:
1. Реверсор тяги турбореактивного двигателя, имеющий кромку изменения направления с изменяющейся кривизной, содержащий трубу инверсии, образующую канал для реверсированного потока в режиме реверсирования тяги, которая ограничена, по крайней мере, со стороны выше по потоку неподвижной кромкой изменения направления, выполненной заодно с неподвижной конструкцией выше по потоку реверсора, отличающийся тем, что сечения кромки изменения...
Пристрій реверсування тяги турбореактивного двоконтурного двигуна
Номер патенту: 78810
Опубліковано: 25.04.2007
Автори: Бугрін Володимир Миколайович, Шерембей Борис Сергійович, Сопітько Сергій Вячеславович, Бірюков Сергій Петрович
МПК: F02K 3/00, F02K 1/12, B64D 31/00
Мітки: тяги, двигуна, двоконтурного, реверсування, турбореактивного, пристрій
Формула / Реферат:
1. Пристрій реверсування тяги турбореактивного двоконтурного двигуна, що містить нерухомий корпус з розміщеними навколо синхронізуючого кільця відхиляючими ґратами, навколо яких рухомо встановлений обтічник, взаємозв'язаний із синхронізуючим кільцем і поворотними передніми та задніми стулками, шарнірно об'єднаними в пари, V-подібні в положенні реверсування, який відрізняється тим, що обтічник взаємозв'язаний із синхронізуючим кільцем за...
Система управління створками реверсу тяги турбореактивного двигуна
Номер патенту: 16309
Опубліковано: 29.08.1997
Автори: Снєжков Олександр Дмитрович, Поляченко Юхим Абрамович, Саранча Володимир Петрович
МПК: B64D 33/00
Мітки: тяги, система, двигуна, реверсу, турбореактивного, створками, управління
Формула / Реферат:
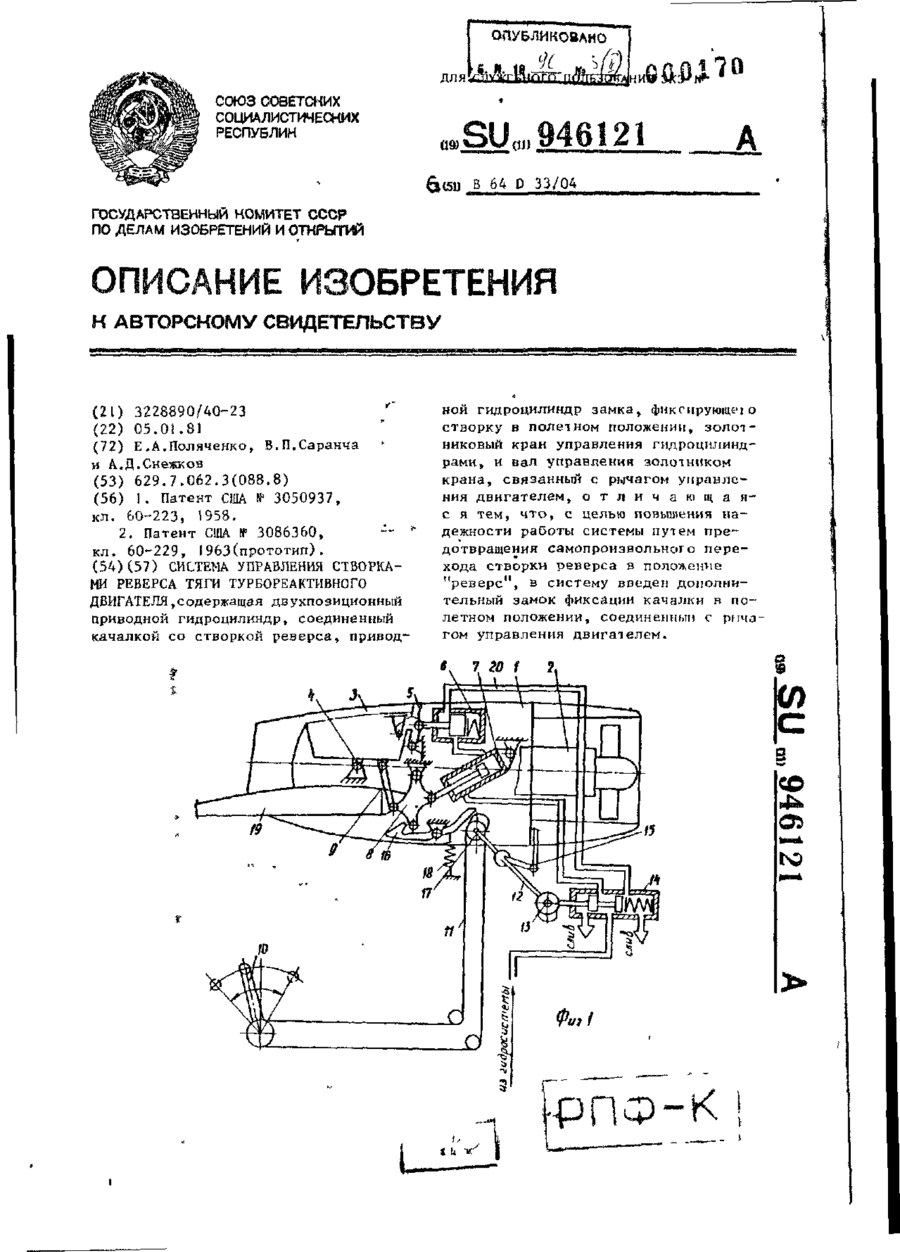
Система управления створками реверса тяги турбореактивного двигателя, содержащая двухпозиционный приводной гидроцилиндр, соединенный качалкой со створкой реверса, приводной гидроцилиндр замка, фиксирующего створку в полетном положении, золотниковый кран управления гидроцилиндрами, и вал управления золотником крана, связанный с рычагом управления двигателем, отличающаяся тем, что, с целью повышения надежности работы системы путем...
Пристрій для автоматичного регулювання частоти обертання колінчастого вала двигуна внутрішнього згоряння
Номер патенту: 1486
Опубліковано: 15.11.2002
Автори: Макаров Василь Миколайович, Рузов Вадим Олександрович, ЧЕРНІГОВ ВІКТОР ЛЕОНІДОВИЧ, Будьонний Михайло Михайлович, ЗАЙОНЧКОВСЬКИЙ ВАЛЕНТИН МИКОЛАЙОВИЧ, ДОРОШ СЕРГІЙ ІВАНОВИЧ, Тараканов Станіслав Іванович, Тернопол Володимир Петрович
МПК: F02D 31/00, F02D 41/00
Мітки: обертання, вала, двигуна, згоряння, автоматичного, регулювання, частоти, внутрішнього, пристрій, колінчастого
Формула / Реферат:
Пристрій для автоматичного регулювання частоти обертання колінчастого вала двигуна внутрішнього згоряння, що містить мікропроцесорний і гідромеханічний блоки управління, автономну масляну систему регулятора, силовий сервомотор, механізм управління силовим сервомотором і стоп-пристрій, який відрізняється тим, що механізм управління силовим сервомотором включає в себе актюатор, золотник і систему гідравлічних каналів, безпосередньо зв'язаних з...
Попередній патент: Гербіцидна композиція та спосіб боротьби з ростом небажаних рослин у культурах корисних рослин
Наступний патент: Гепатозахисний лікувально-профілактичний засіб
Випадковий патент: Гальмівна колодка