Швейний напівавтомат
Номер патенту: 90827
Опубліковано: 10.06.2014
Автори: Орловський Броніслав Вікентійович, Єфименко Владислав Борисович, Радчук Юрій Степанович

Формула / Реферат
1. Швейний напівавтомат, що містить швейну головку, головний вал, кінематично з'єднаний з шатуном, кінематично зв'язаним з голковим валом, першим коромислом та голководом, та засіб переміщення по контуру, який має підпружинений притискний диск, кінематично зв'язаний з першим пневмоциліндром та засобом керування, який відрізняється тим, що засіб переміщення по контуру додатково оснащений шатуном, другим коромислом, другим пневмоциліндром, валом, обгінною муфтою, валиком з гумовим покриттям та повзуном, шатун утворений верхньою та нижньою частинами та кінематично зв'язаний з другим пневмоциліндром, що шарнірно закріплений на швейній головці, нижня частина шатуна кінематично з'єднана з другим коромислом, яке змонтоване на обгінній муфті, що посаджена на валу, при цьому повзун змонтований по одну сторону обгінної муфти, а валик з гумовою поверхнею по другу сторону обгінної муфти.
2. Швейний напівавтомат за п. 1, який відрізняється тим, що засіб керування містить з'єднані між собою датчик кута повороту, лічильник числа обертів, контролер, два пневморозподільника та чотири соленоїда.
Текст
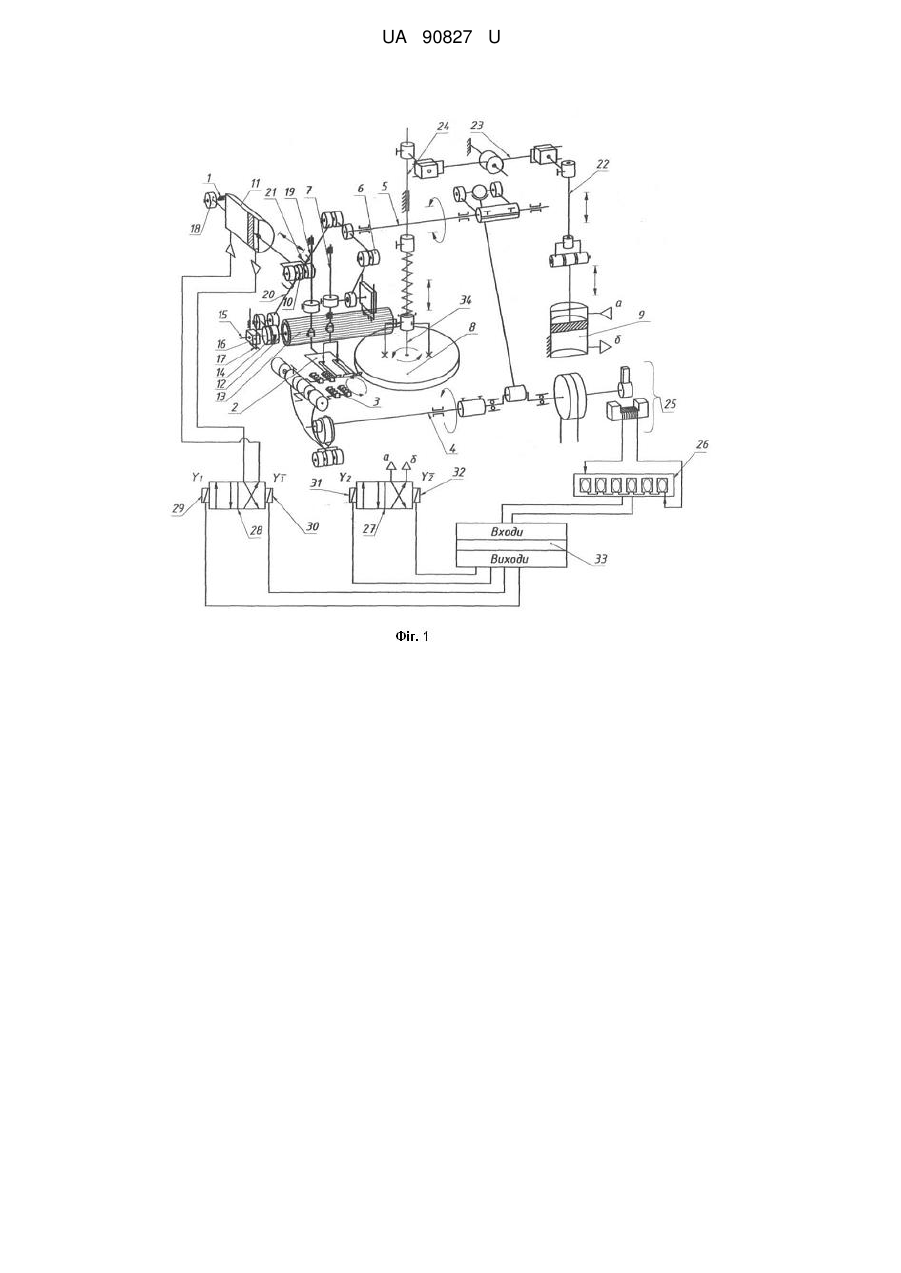
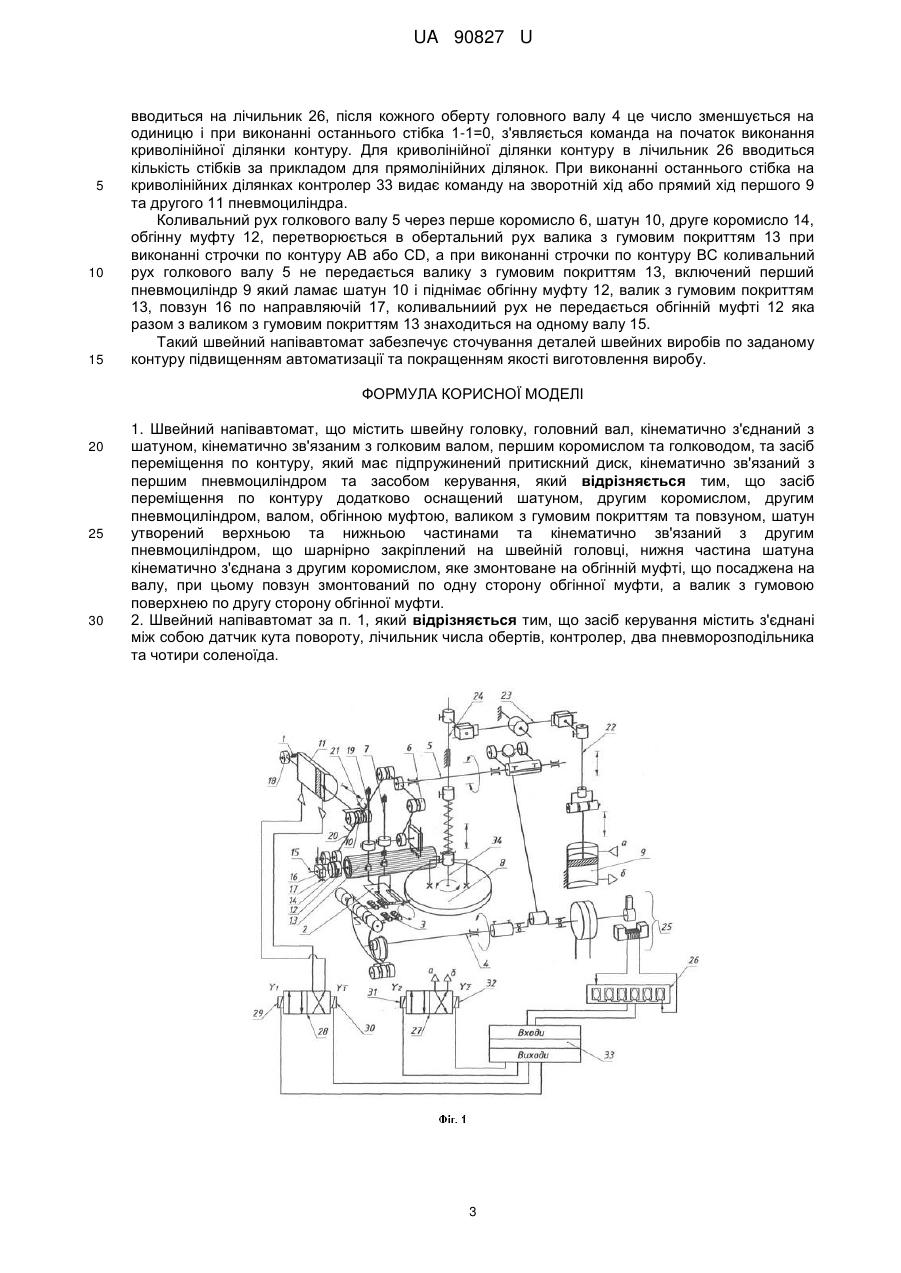
Реферат: Швейний напівавтомат містить швейну головку, головний вал, кінематично з'єднаний з шатуном, кінематично зв'язаним з голковим валом, першим коромислом та голководом, та засіб переміщення по контуру, який має підпружинений притискний диск, кінематично зв'язаний з першим пневмоциліндром та засобом керування. Засіб переміщення по контуру додатково оснащений шатуном, другим коромислом, другим пневмоциліндром, валом, обгінною муфтою, валиком з гумовим покриттям та повзуном. Шатун утворений верхньою та нижньою частинами та кінематично зв'язаний з другим пневмоциліндром, що шарнірно закріплений на швейній головці. Нижня частина шатуна кінематично з'єднана з другим коромислом, яке змонтоване на обгінній муфті, що посаджена на валу. Повзун змонтований по одну сторону обгінної муфти, а валик з гумовою поверхнею по другу сторону обгінної муфти. UA 90827 U (54) ШВЕЙНИЙ НАПІВАВТОМАТ UA 90827 U UA 90827 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до швейних напівавтоматів та використовується в швейній промисловості, зокрема для сточування по контуру виробу, контур якого утворений двома прямими ділянками і ділянкою, на якій нитковий шов виконується по дузі радіусом R, наприклад спецрукавиці. Відомий швейний напівавтомат (А.с. № 654711, МПК D05В21/00, 1979), який містить швейну головку, голкову пластину, притискну лапку, зубчасту рейку, голковод та засоби переміщення виробу по контуру, які виготовлені у вигляді касети-шаблона, що має зубчасту рейку, яка відповідає контуру деталі сточуваних деталей. Складність конструкції, невисока надійність в роботі тому, що використовуються вищі кінематичні пари у вигляді зубчастої рейки касети-шаблона, потребує застосування складних технологічних операцій машинобудування при виготовленні засобів переміщення виробу по контуру. Наявність зубчастої передачі та черв’ячної передачі веде до виникнення значних реакцій в кінематичних парах, а значить, приводить до їх зношування і появи зазорів та до появи акустичних шумів і погіршення умов роботи оператора при експлуатації швейного напівавтомата. Окрім того, у цих засобах застосовуються масаінерційні касети-шаблони різних типорозмірів, що потребує значних матеріальних затрат та фінансових затрат для виготовлення і зберігання таких касет-шаблонів. Відомий також швейний напівавтомат (А.с. № 1112075, МПК D05В21/00, 1979), що містить швейну головку, головний вал, кінематично з'єднаний з шатуном, кінематично зв'язаним з голковим валом, першим коромислом та голководом, та засіб переміщення по контуру, який має підпружинений притискний диск, кінематично зв'язаний з першим пневмоциліндром та засобом керування. У відомому швейному напівавтоматі використання на прямолінійних ділянок контуру дугоподібної направляючої, яка кінематично з'єднана з електромагнітним приводом призводить до відхилення ниткового шва. При розкроюванні деталі крою не завжди рівні, мають ворс з обрізаних ниток, що приводить до непрямолінійності ниткового шва на прямолінійних ділянках контуру. В результаті погіршується якість ниткового шва на прямолінійних ділянках контуру при сточуванні виробу, наприклад спецрукавиць. В основу корисної моделі покладена задача створити такий швейний напівавтомат, у якому введенням нових елементів та їх зв'язків, забезпечилась би підвищенням його автоматизації та покращення якості виготовлення виробу. Поставлена задача досягається тим, що швейний напівавтомат містить швейну головку, головний вал, кінематично з'єднаний з шатуном, кінематично зв'язаним з голковим валом, першим коромислом та голководом, та засіб переміщення по контуру, який має підпружинений притискний диск, кінематично зв'язаний з першим пневмоциліндром та засобом керування, згідно з корисною моделлю, засіб переміщення по контуру додатково оснащений шатуном, другим коромислом, другим пневмоциліндром, валом, обгінною муфтою, валиком з гумовим покриттям та повзуном, шатун утворений верхньою та нижньою частинами та кінематично зв'язаний з другим пневмоциліндром, що шарнірно закріплений на швейній головці, нижня частина шатуна кінематично з'єднана з другим коромислом, яке змонтоване на обгінній муфті, що посаджена на валу, при цьому повзун змонтований по одну сторону обгінної муфти, а валик з гумовою поверхнею по другу сторону обгінної муфти. Крім того засіб керування містить з'єднані між собою датчик кута повороту, лічильник числа обертів, контролер, два пневморозподільника та чотири соленоїда. Введення в засіб переміщення по контуру шатуна, другого коромисла, другого пневмоциліндра, вала, обгінної муфти, валика з гумовим покриттям та повзуна, де шатун утворений верхньою та нижньою частинами та кінематично зв'язаний з другим пневмоциліндром, що шарнірно закріплений на швейній головці, нижня частина шатуна кінематично з'єднана з другим коромислом, яке змонтоване на обгінній муфті, що посаджена на валу, при цьому повзун змонтований по одну сторону обгінної муфти, а валик з гумовим покриттям по другу сторону обгінної муфти, дозволяє створити додаткове транспортуюче зусилля, яке виконує строчку по прямій, що є результатом взаємодії валика з гумовою поверхнею з матеріалом, що знаходиться на голковій пластині між робочими поверхнями яких виникають сили зачеплення. Так як сили тертя в парі з валиком з гумовим покриттям з матеріалом більше ніж сили тертя голкової пластини, тому виникає рушійна сила по всій ширині виробу, яка додається до рушійної сили збоку зубчастих рейок і при виконанні ниткового шва по дузі відключення валика з гумовою поверхнею здійснюється за допомогою шатуна з двох частин і першого пневмоциліндра. Таким чином така конструкція швейного напівавтомата забезпечує підвищення його автоматизації та покращення якості виготовлення виробу, засіб керування, який містить з'єднані 1 UA 90827 U 5 10 15 20 25 між собою датчик кута повороту, лічильник числа обертів, контролер, два пневморозподільника та чотири соленоїда, які реалізують цикл роботи, а саме включення першого пневмоциліндра, виключення першого пневмоциліндра, включення другого пневмоциліндра, виключення другого пневмоциліндра, включення першого пневмоциліндра, виключення першого пневмоциліндра, що дозволяє здійснювати підйом і опускання валика з гумовою поверхнею, що також забезпечує підвищення автоматизації швейного напівавтомата. На Фіг. 1 - представлення комбінована 3D схема швейного напівавтомата, на Фіг. 2 - схема положень виробу (спецрукавиці) при переміщенні по контуру ABCD для правої, DCBA для лівої спецрукавиці, на Фіг. 3 - вид загальний засобів переміщення по контуру на прямолінійних ділянках (у робочому стані), на Фіг. 4 - вид загальний засобів переміщення по контуру на прямолінійних ділянках (у неробочому стані), на Фіг. 5 - функціональний граф. Швейний напівавтомат містить з швейну головку 1, притискну лапку 2, зубчасту рейку 3 кінематично з'єднану з головним валом 4, голковий вал 5, перше коромисло 6, голковод 7, підпружинений притискний диск 8, перший пневмоциліндр 9, шатун 10, другий пневмоциліндр 11, обгінну муфту 12, валик з гумовим покриттям 13. Валик з гумовим покриттям 13 кінематично зв'язаний з першим коромислом 6, за допомогою шатуна 10, другого коромисла 14, обгінної муфти 12 змонтованої на валу 15, повзуна 16, направляючої 17, другого пневмоциліндра 11, шарніра 18. Шатун 10 кінематично зв'язаний з верхньою частиною 19, нижньою частиною 20, пружиною 21. Притискний диск 8, кінематично з'єднаний з першим пневмоциліндром 9 за допомогою тяги 22, двоплечого коромисла 23 і вертикального стержня 24. Швейний напівавтомат містить робочу поверхню, яка змінюється в період виконання циклу виконуваного технологічною операцією у вигляді прямої строчки АВ і CD які утворені валиком з гумовим покриттям 13 та зубчастою рейкою 3. Переміщення валика з гумовим покриттям 13 здійснюється за командою засобу керування, який містить датчик кута 25, лічильник 26, два пневморозподільники 27 та 28, соленоїд 29 (Y1) прямого включення другого пневмоциліндра 11, соленоїда 30 Y 1 зворотного включення другого пневмоциліндра 11, соленоїда 31 (Y2) прямого включення першого пневмоциліндра 9, 30 35 соленоїда 32 Y 2 зворотного включення першого пневмоциліндра 9, пов'язаний з першим пневмоциліндром 9, другим пневмоциліндром 11, контролером 33, позицією 34 позначена голка, 35 спецрукавиці. Швейний напівавтомат працює наступним чином. Спецрукавиці 35 сточуються по контуру попарно і з'єднані між собою перехідним ланцюговим стібком. Виконання строчки на ділянках АВ та CD контуру здійснюється зубчастою рейкою 3 та валиком з гумовим покриттям 13 при крайньому нижньому положенні та крайньому верхньому положенні притискного диска 8, який знаходиться в неробочому стані за допомогою першого пневмоциліндра 9 який отримує команду від пневморозподільника 28 при наявності 40 45 50 55 електричного струму в котушки соленоїда 33 ( Y 2 1 ; Y2 0 ) Виконання строчки на ділянці ВС контуру здійснюється зубчастою рейкою З при крайньому нижньому положенні притискного диска 8 та при крайньому верхньому положенні валика з гумовим покриттям 13, який знаходиться в неробочому стані за допомогою другого пневмоциліндра 11 який отримує команду від пневморозподільника 29 при наявності електричного струму в котушки соленоїда 31 ( Y1 1 ; Y 1 0 ). При цьому голка 34 проколює спецрукавицю 35 в центрі повороту, а валик з гумовим покриттям 13 піднімається вверх, утворюючи робочу поверхню. В такому положенні валик з гумовим покриттям 13 спецрукавиця 35 здійснює плоско-паралельне переміщення відносно нерухомої голки 34. Засіб керування реалізує цикл, а саме включення першого пневмоциліндра - опускання валика з гумовим покриттям 13 (початок виконання строчки по прямій АВ), виключення першого пневмоциліндра 9 - піднімання валика з гумовим покриттям 13 (кінець виконання строчки по прямій АВ), включення другого пневмоциліндра 11 - опускання притискного диска 8 (виконання строчки на ділянці ВС контуру), виключення другого пневмоциліндра 11 - піднімання притискного диска 8 (кінець виконання строчки на ділянці ВС контуру), включення першого пневмоциліндра 9 - опускання валика з гумовим покриттям 13 (початок виконання строчки по прямій CD), виключення першого пневмоциліндра 9 – піднімання валика з гумовим покриттям 13 (кінець виконання строчки по прямій CD). Момент включення, виключення соленоїдів 29, 30, 31, 32 які підключені до виходів контролера 33, на відповідних ділянках контуру виконується командами цього контролера 33. На вході контролера 33 підключений лічильник 26, який підраховує кількість обертів головного валу 4, а значить кількість стібків на прямолінійних і криволінійних ділянках строчки. Попередня машина настроюється на довжину стібка 3 мм. Вимірюється довжина ділянок, наприклад, AB=CD=DC=BA=210 мм., кількість стібків на цих ділянках дорівнює 210/3=70 стібків. Це число 2 UA 90827 U 5 10 15 вводиться на лічильник 26, після кожного оберту головного валу 4 це число зменшується на одиницю і при виконанні останнього стібка 1-1=0, з'являється команда на початок виконання криволінійної ділянки контуру. Для криволінійної ділянки контуру в лічильник 26 вводиться кількість стібків за прикладом для прямолінійних ділянок. При виконанні останнього стібка на криволінійних ділянках контролер 33 видає команду на зворотній хід або прямий хід першого 9 та другого 11 пневмоциліндра. Коливальний рух голкового валу 5 через перше коромисло 6, шатун 10, друге коромисло 14, обгінну муфту 12, перетворюється в обертальний рух валика з гумовим покриттям 13 при виконанні строчки по контуру АВ або CD, а при виконанні строчки по контуру ВС коливальний рух голкового валу 5 не передається валику з гумовим покриттям 13, включений перший пневмоциліндр 9 який ламає шатун 10 і піднімає обгінну муфту 12, валик з гумовим покриттям 13, повзун 16 по направляючій 17, коливальниий рух не передається обгінній муфті 12 яка разом з валиком з гумовим покриттям 13 знаходиться на одному валу 15. Такий швейний напівавтомат забезпечує сточування деталей швейних виробів по заданому контуру підвищенням автоматизації та покращенням якості виготовлення виробу. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 1. Швейний напівавтомат, що містить швейну головку, головний вал, кінематично з'єднаний з шатуном, кінематично зв'язаним з голковим валом, першим коромислом та голководом, та засіб переміщення по контуру, який має підпружинений притискний диск, кінематично зв'язаний з першим пневмоциліндром та засобом керування, який відрізняється тим, що засіб переміщення по контуру додатково оснащений шатуном, другим коромислом, другим пневмоциліндром, валом, обгінною муфтою, валиком з гумовим покриттям та повзуном, шатун утворений верхньою та нижньою частинами та кінематично зв'язаний з другим пневмоциліндром, що шарнірно закріплений на швейній головці, нижня частина шатуна кінематично з'єднана з другим коромислом, яке змонтоване на обгінній муфті, що посаджена на валу, при цьому повзун змонтований по одну сторону обгінної муфти, а валик з гумовою поверхнею по другу сторону обгінної муфти. 2. Швейний напівавтомат за п. 1, який відрізняється тим, що засіб керування містить з'єднані між собою датчик кута повороту, лічильник числа обертів, контролер, два пневморозподільника та чотири соленоїда. 3 UA 90827 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюOrlovskyi Bronislav Vikentiiovych
Автори російськоюОрловский Бронислав Викентьевич
МПК / Мітки
МПК: D05B 21/00
Мітки: швейний, напівавтомат
Код посилання
<a href="https://ua.patents.su/6-90827-shvejjnijj-napivavtomat.html" target="_blank" rel="follow" title="База патентів України">Швейний напівавтомат</a>
Швейний виріб

Номер патенту: 75446
Опубліковано: 26.11.2012
Автор: Ланда Аліна Олександрівна
МПК: A41D 23/00, A41D 25/00, A41D 27/18
Формула / Реферат:
1. Швейний виріб, що являє собою щонайменше одну смугу тканини, викроєну по косій, і має серединну і кінцеві ділянки, який відрізняється тим, що містить закладені віялом і закріплені складки і рознімну застібку, елементи якої розміщені на кінцевих ділянках.2. Швейний виріб за п. 1, який відрізняється тим, що складки закладені на одній або обох кінцевих ділянках.3. Швейний виріб за п. 1, який відрізняється тим, що складки...
Напівавтомат розрізання твердого сиру
Номер патенту: 65158
Опубліковано: 15.03.2004
Автори: Базалій Валентин Петрович, ОВДІЙ ВІКТОР МИКИТОВИЧ
МПК: B26D 1/01
Мітки: напівавтомат, розрізання, твердого, сиру
Формула / Реферат:
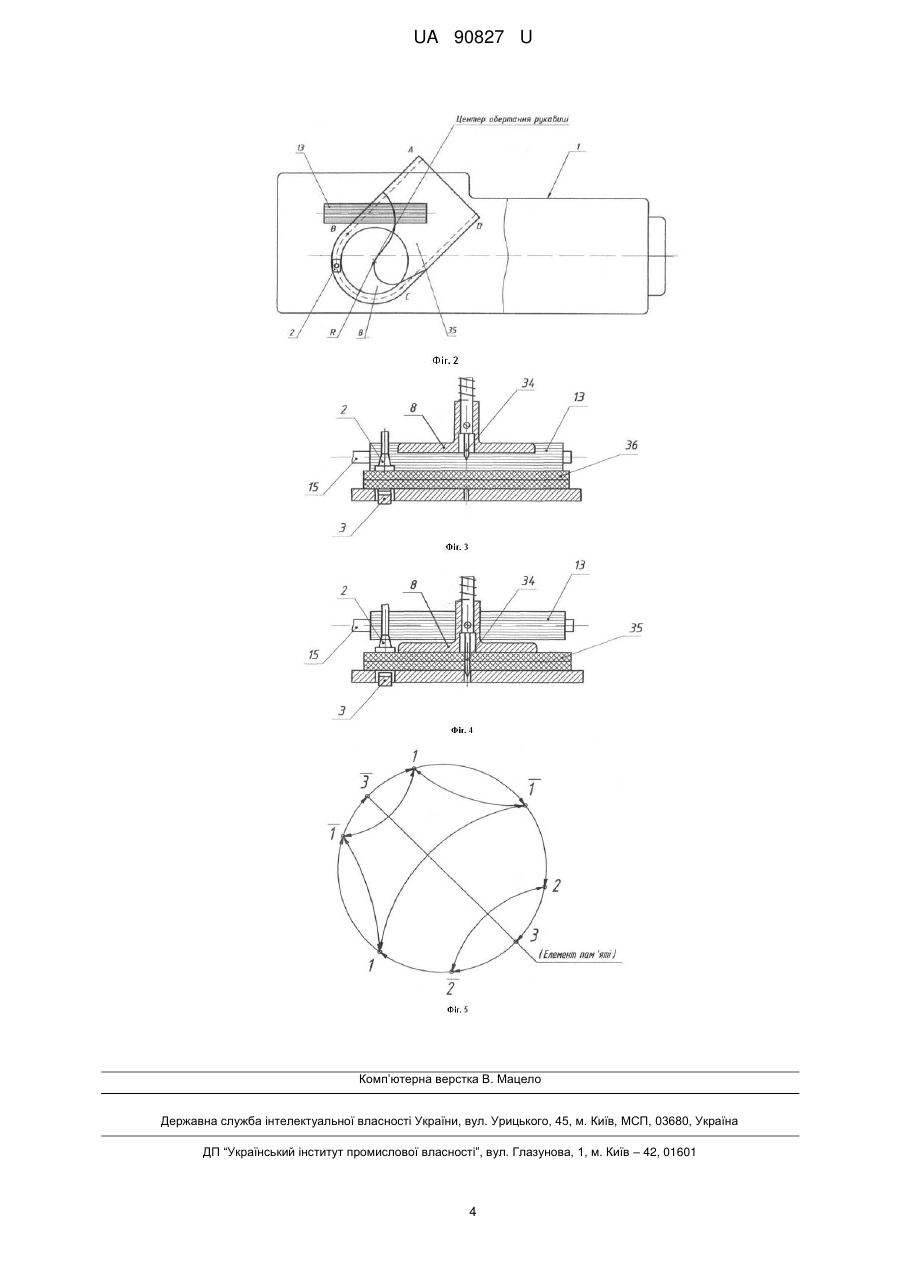
1. Напівавтомат розрізання твердого сиру, що містить стіл, ріжучий ніж закріплений до рухомих стояків з можливістю піднімально-опускного руху приводом, який відрізняється тим, що на столі змонтована платформа під ріжучим ножем виконана з діаметральними прорізями на потрібний кут з можливістю її повороту на цей кут, штовхач та притискач.2. Напівавтомат за п. 1, який відрізняється тим, що платформа змонтована в підшипникових напрямних і...
Напівавтомат для розливу рідких продуктів
Номер патенту: 2646
Опубліковано: 15.07.2004
Автори: Бурдун Сергій Вікторович, Василенко Валерій Федорович, Даниленко Віталій Федорович, Тихомиров Олександр Геннадійович
МПК: B65B 3/00
Мітки: напівавтомат, розливу, рідких, продуктів
Формула / Реферат:
Напівавтомат для розливу рідких нафтопродуктів, що містить дозатор, який відрізняється тим, що містить ваговий дозатор, керування яким та регулювання дози продукту здійснюється за командою від електронних ваг, має режим точного доливу і укомплектований закупорювальною головкою і колісною платформою.
Двопозиційний напівавтомат для видуву пляшок пет

Номер патенту: 23266
Опубліковано: 19.05.1998
Автор: Косс Аркадій Ізяславович
МПК: B29C 49/08
Мітки: двопозиційний, пляшок, видуву, пет, напівавтомат
Формула / Реферат:
Двопозиційний напівавтомат для виду-ву пляшок ПЕТ, який містить станину, нерухомий стояк, механізм змикання та розмикання півформ, механізм приводу стержнів для осьового витягування заготовок та механізм притиску заготовок, який включає пневмоциліндр, корпус якого зв'язаний з нерухомим стояком, а шток з'єднаний з рухомою у вертикальному напрямку плитою, в якій закріплені стакани з отворами для підведення повітря та центральними отворами для...
Напівавтомат нарізання харчового продукту
Номер патенту: 77687
Опубліковано: 15.01.2007
Автори: Базалій Валентин Петрович, ОВДІЙ ВІКТОР МИКИТОВИЧ
МПК: B26D 1/01
Мітки: нарізання, напівавтомат, продукту, харчового
Формула / Реферат:
1. Напівавтомат нарізання харчового продукту, що містить стіл, різальний ніж, закріплений до рухомих стояків, привід ножа, який забезпечує піднімально-опускальний рух ножа, механізм подачі (переміщення) харчового продукту під різальний ніж та механізм поперемінного перемикання приводів різального ножа та механізму подачі харчового продукту, який відрізняється тим, що механізм подачі (переміщення) харчового продукту під різальний ніж виконаний...