Установка для зняття зовнішнього грату на трубах
Номер патенту: 19811
Опубліковано: 15.12.2006
Автори: Моторін Артур Миколайович, Малюсейко Віктор Миронович, Омельченко Володимир Анатолійович
Формула / Реферат
1. Установка для зняття зовнішнього грату на трубах, що містить основу і розміщену на ньому рухому раму, на якій змонтовані різцетримачі з різальним інструментом і привід їх обертання, і систему керування, зв'язану із зазначеним приводом, яка відрізняється тим, що основа виконана у вигляді вертикальних стійок, жорстко з'єднаних між собою нижніми і верхніми горизонтальними балками, і включає подовжні напрямні, закріплені на двох протилежних нижніх горизонтальних балках, і приводи подовжнього і вертикального переміщення, рухома рама встановлена на подовжніх напрямних з можливістю подовжнього і вертикального переміщення відносно основи за допомогою зазначених приводів і виконана у вигляді платформи з жорстко закріпленими на ній вертикальними стійками, розміщеними попарно на протилежних сторонах платформи симетрично відносно подовжньої осі основи і з'єднаними у верхній частині горизонтальними балками, між горизонтальними балками і платформою розміщені вертикальні напрямні, між якими змонтована опорна плита із закріпленими на ній робочим колесом і приводом його обертання, встановлена з можливістю переміщення уздовж вертикальних напрямних для забезпечення співвісного положення робочого колеса з оброблюваною трубою і фіксації в цьому положенні відносно основи і платформи, різцетримачі з різальним інструментом змонтовані на робочому колесі за допомогою затискачів, симетрично розміщених відносно вертикальної і горизонтальної осей робочого колеса з можливістю одночасного обертання з ним і кутового повороту відносно вертикальної осі, а опорна плита обладнана нижньою і верхньою несучими площадками, нижня з яких з'єднана з приводом вертикального переміщення, а на верхній змонтований привід радіального переміщення, встановлений з можливістю взаємодії із затискачами для кутового повороту різальних інструментів при обертанні робочого колеса, при цьому в середній частині робочого колеса і опорної плити уздовж їх подовжніх осей виконані крізні отвори для розміщення оброблюваної труби, на основі по обидві сторони від робочого колеса закріплені підтримуючі ролики, на верхніх горизонтальних балках основи над підтримуючими роликами змонтовані пневматичні притискачі, встановлені з можливістю взаємодії з оброблюваною трубою, зазначені привід подовжнього переміщення, робоче колесо, привід радіального переміщення і пневматичні притискачі містять кінцеві вимикачі, а система управління додатково зв'язана з приводом подовжнього переміщення, приводом радіального переміщення, пневматичними притискачами і кінцевими вимикачами з можливістю керування операціями зняття і видалення грату в налагоджувальному режимі і в напівавтоматичному режимі при обробці труб різного діаметра.
2. Установка за пунктом 1, яка відрізняється тим, що робоче колесо складено з кріпильного диска і закріплених на його протилежних сторонах робочого диска і зубчатого вінця, при цьому затискачі різцетримачів з ріжучим інструментом змонтовані на робочому диску, а зубчатий вінець з'єднаний з приводом обертання за допомогою шестерні, закріпленої на його вихідному валу.
3. Установка за пунктом 2, яка відрізняється тим, що робочий диск містить обмежувальні упори, закріплені на ньому по обох сторонах від кожного затискача, а кожний затискач різцетримачів обладнаний поворотним важелем, виступаючим за зовнішній діаметр робочого колеса і змонтованим на ньому з можливістю кутового повороту між обмежувальними упорами, при цьому привід радіального переміщення встановлений з можливістю взаємодії із затискачами за допомогою зазначених поворотних важелів.
4. Установка за пунктом 1, яка відрізняється тим, що привід подовжнього переміщення виконаний у вигляді гідроциліндра.
5. Установка за пунктом 1, яка відрізняється тим, що привід вертикального переміщення виконаний у вигляді гвинтового механізму, змонтованого на основі уздовж його вертикальної осі.
6. Установка за пунктом 1, яка відрізняється тим, що привід радіального переміщення виконаний у вигляді пневмоциліндра, шток якого обладнаний упором.
7. Установка за пунктом 1, яка відрізняється тим, що привід обертання виконаний у вигляді реверсивного мотор-редуктора для підведення або відведення різального інструмента до оброблюваної труби шляхом кутового повороту затискачів при обертанні вала мотор-редуктора відповідно по годинниковій або проти годинникової стрілки на один оберт при взаємодії поворотного важеля з упором приводу радіального переміщення.
8. Установка за пунктом 1, яка відрізняється тим, що різальні інструменти виконані у вигляді різців, закріплених на різцетримачах із збільшенням вильоту кожного подальшого різця по периметру робочого диска на 3-5 мм.
9. Установка за пунктом 1, яка відрізняється тим, що робоче колесо виконано змінним.
10. Установка за пунктом 8, яка відрізняється тим, що різці виконані змінними.
11. Установка за пунктом 1, яка відрізняється тим, що додатково містить датчик наявності грату, закріплений на основі перед підтримуючим роликом з боку подачі труби.
12. Установка за пунктом 8, яка відрізняється тим, що система керування містить пульт керування установкою, що містить дисплей, кнопкову панель і програмований логічний контролер, зв'язані з приводом обертання, приводом подовжнього переміщення, приводом радіального переміщення, пневматичними притискачами, кінцевими вимикачами і датчиком наявності грату.
13. Установка за пунктом 1, яка відрізняється тим, що додатково містить контейнер для збору відходів, виконаний, наприклад, у вигляді металевого ящика, встановленого на рухомій рамі під робочим колесом.
14. Установка за пунктом 1, яка відрізняється тим, що додатково містить захисні екрани, закріплені на рухомій рамі по периметру робочого колеса в зоні зняття грату.
Текст
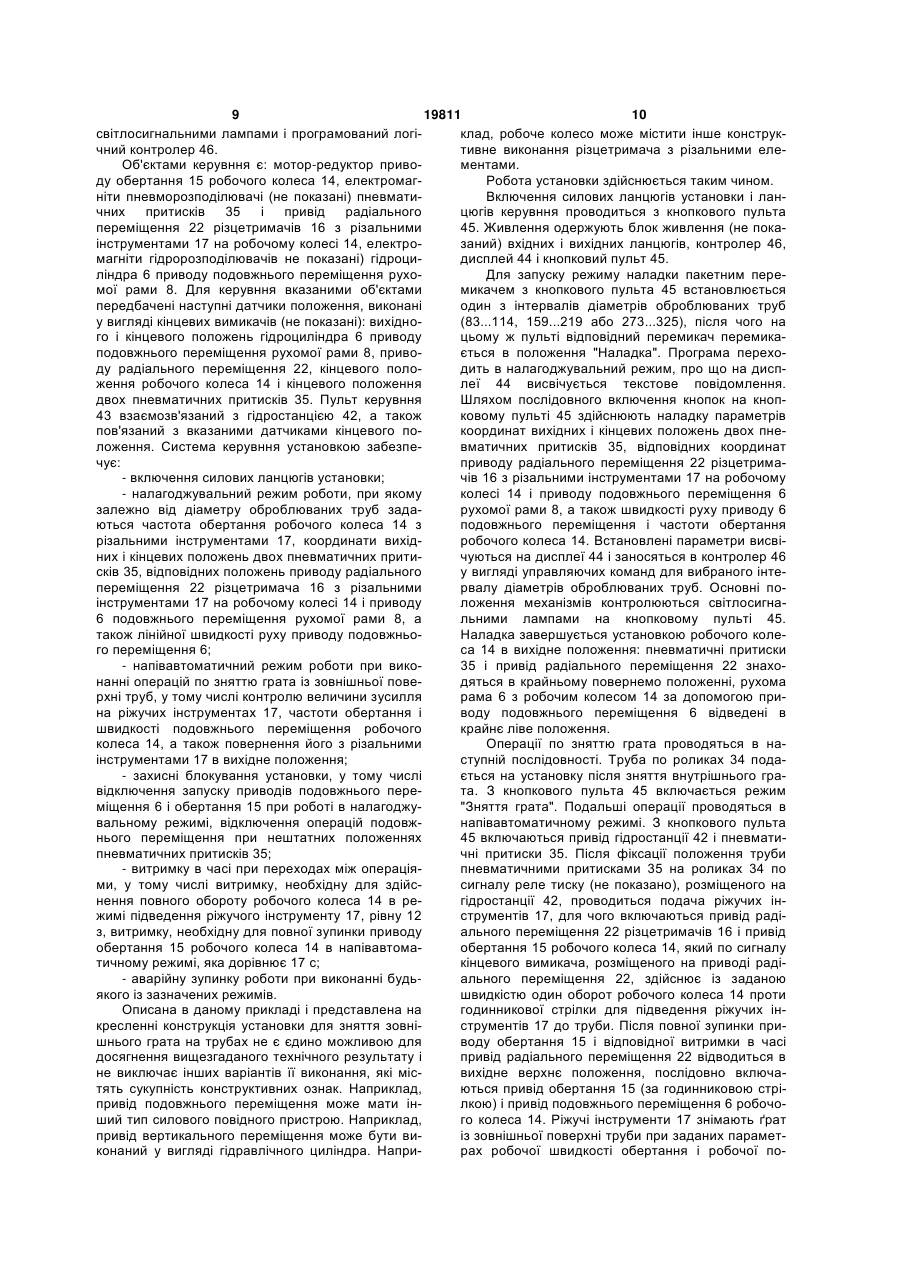
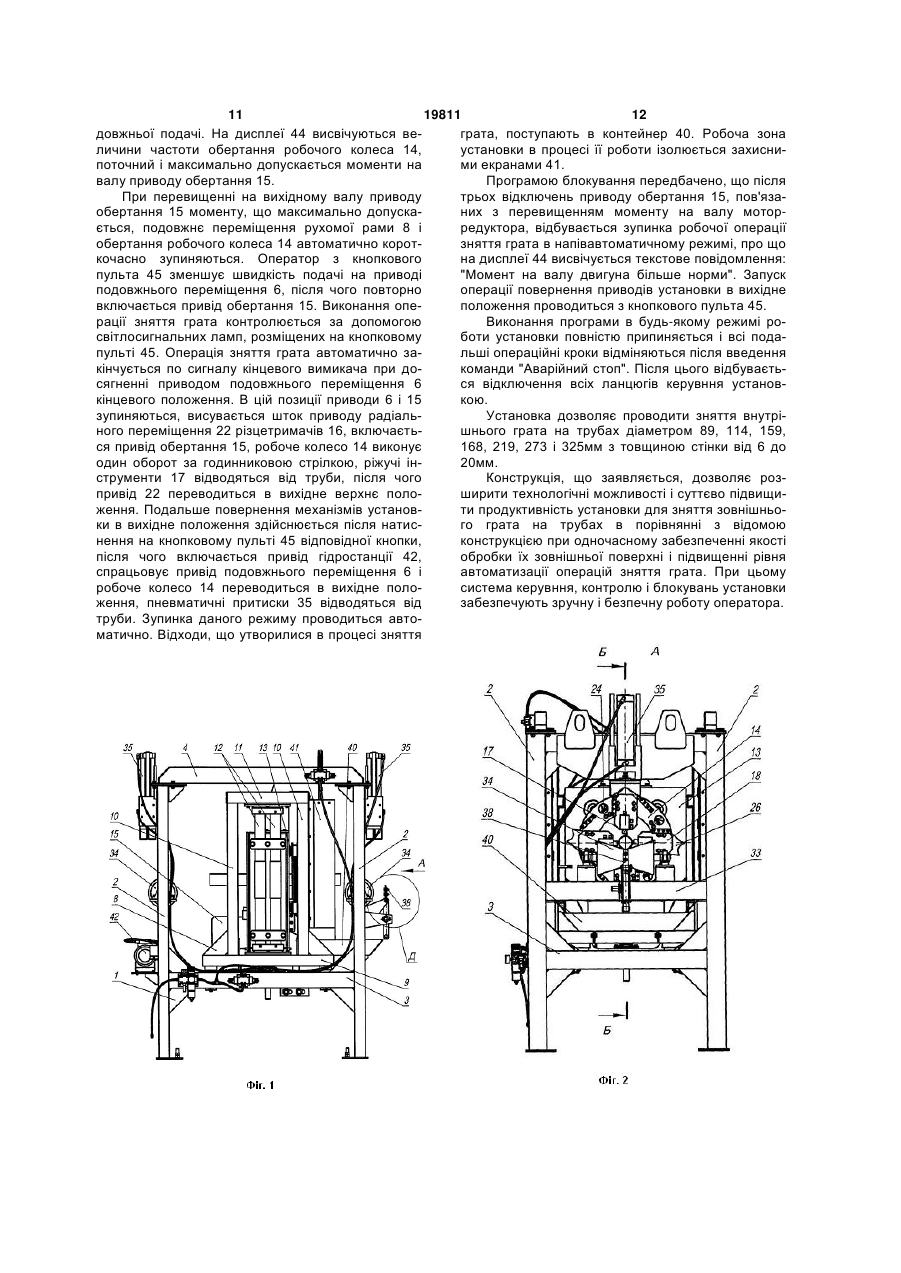
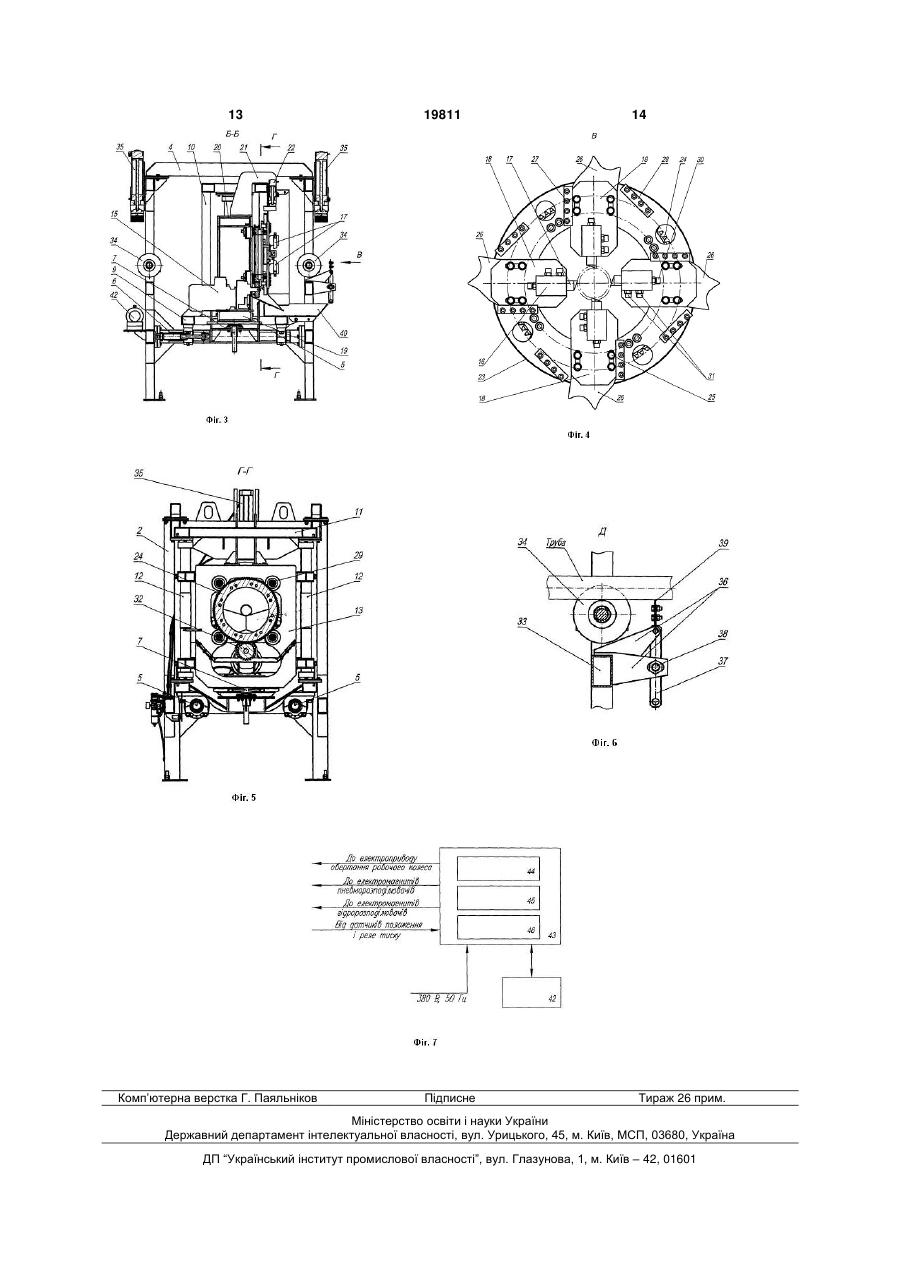
1. Установка для зняття зовнішнього грату на трубах, що містить основу і розміщену на ньому рухому раму, на якій змонтовані різцетримачі з різальним інструментом і привід їх обертання, і систему керування, зв'язану із зазначеним приводом, яка відрізняється тим, що основа виконана у вигляді вертикальних стійок, жорстко з'єднаних між собою нижніми і верхніми горизонтальними балками, і включає подовжні напрямні, закріплені на двох протилежних нижніх горизонтальних балках, і приводи подовжнього і вертикального переміщення, рухома рама встановлена на подовжніх напрямних з можливістю подовжнього і вертикального переміщення відносно основи за допомогою зазначених приводів і виконана у вигляді платформи з жорстко закріпленими на ній вертикальними стійками, розміщеними попарно на протилежних сторонах платформи симетрично відносно подовжньої осі основи і з'єднаними у верхній частині горизонтальними балками, між горизонтальними балками і платформою розміщені вертикальні напрямні, між якими змонтована опорна плита із закріпленими на ній робочим колесом і приводом його обертання, встановлена з можливістю переміщення уздовж вертикальних напрямних для забезпечення співвісного положення робочого колеса з оброблюваною трубою і фіксації в цьому положенні відносно основи і платформи, різцетримачі з різальним інструментом змонтовані на робочому колесі за допомогою затискачів, симетрично розміщених відносно вертикальної і горизонтальної осей робочого колеса з можливістю одночасного обертання з ним і кутового повороту відносно вертикальної осі, а опорна плита обладнана нижньою і верхньою несучими площадками, нижня з яких з'єднана з приводом вертикального переміщення, а на верхній змонтований привід радіального переміщення, встановлений з 2 (19) 1 3 19811 4 6. Установка за пунктом 1, яка відрізняється тим, 11. Установка за пунктом 1, яка відрізняється що привід радіального переміщення виконаний у тим, що додатково містить датчик наявності грату, вигляді пневмоциліндра, шток якого обладнаний закріплений на основі перед підтримуючим ролиупором. ком з боку подачі труби. 7. Установка за пунктом 1, яка відрізняється тим, 12. Установка за пунктом 8, яка відрізняється що привід обертання виконаний у вигляді ревертим, що система керування містить пульт керувансивного мотор-редуктора для підведення або відня установкою, що містить дисплей, кнопкову паведення різального інструмента до оброблюваної нель і програмований логічний контролер, зв'язані труби шляхом кутового повороту затискачів при з приводом обертання, приводом подовжнього обертанні вала мотор-редуктора відповідно по переміщення, приводом радіального переміщення, годинниковій або проти годинникової стрілки на пневматичними притискачами, кінцевими вимикаодин оберт при взаємодії поворотного важеля з чами і датчиком наявності грату. 13. Установка за пунктом 1, яка відрізняється упором приводу радіального переміщення. 8. Установка за пунктом 1, яка відрізняється тим, тим, що додатково містить контейнер для збору що різальні інструменти виконані у вигляді різців, відходів, виконаний, наприклад, у вигляді металезакріплених на різцетримачах із збільшенням вивого ящика, встановленого на рухомій рамі під льоту кожного подальшого різця по периметру робочим колесом. 14. Установка за пунктом 1, яка відрізняється робочого диска на 3-5 мм. 9. Установка за пунктом 1, яка відрізняється тим, тим, що додатково містить захисні екрани, закріпщо робоче колесо виконано змінним. лені на рухомій рамі по периметру робочого коле10. Установка за пунктом 8, яка відрізняється са в зоні зняття грату. тим, що різці виконані змінними. Корисна модель відноситься до області зварки, зокрема, до установок для зняття грата із зовнішньої поверхні труб після їх зварки оплавленням в контактно-зварювальних машинах на лініях зварки двотрубних секцій в промислових умовах, і може бути використана в різних галузях промисловості як при зварці труб на механізованих потокових лініях, так і при зварці трубопроводів із застосуванням контактної стикової зварки. Відома установка для зняття зовнішнього грата на трубах [Банов М.Д. Технология и оборудование контактной сварки: Учебник - М.: Издательский центр «Академия», 2005. - 224с, с. 131-136, мал. 6.18, 6.19], яка містить основу і розміщену на ньому рухому раму, на якій змонтовані різцетримачі з різальним інструментом і привід їх обертання, і систему керувння, зв'язану із зазначеним приводом. Основа виконана у вигляді двох напівкілець, що охоплюють трубу по її периметру і з'єднаних між собою віссю і гідравлічним замком. На основі закріплені кругові напрямні і зубчатий вінець, по яких переміщаються дві діаметрально розташовані рухомі рами, виконані у вигляді візків. Кожна рухома рама складається з двох частин, шарнірно зв'язаних між собою: на одній частині встановлений привід переміщення рами, виконаний у вигляді електродвигуна з редуктором, який зв'язаний з повідними роликами, на другій частині - різцетримачі з різальним інструментом і привід їх обертання. Різцетримачі за допомогою клинопасової передачі з'єднаний з приводом обертання, виконаним у вигляді електродвигуна. Ріжучі інструменти є триступінчатими торцевими фрезами і закріплені на різцетримачах гайками. Керувння приводами установки проводиться з переносного пульта. Установка призначена для зняття зовнішнього грата на трубах великого діаметру при зварці трубопроводів із застосуванням контактної стикової зварки в польових умовах. її робота здійснюється з використанням трубоукладачів і автономної електростанції. Основним недоліком відомої установки є обмежені технологічні можливості використовування, що не дозволяють пристосовувати її при знятті грата із зовнішньої поверхні труб у складі ліній зварки двотрубних секцій в промислових умовах і при знятті грата на трубах невеликого діаметру. Окрім цього, недоліками установки є низька продуктивність, невисока якість обробки зовнішньої поверхні труб і недостатній рівень автоматизації і контролю операцій по зняттю грата. В основу корисної моделі поставлена задача створення такої установки для зняття зовнішнього грата на трубах, в якій за рахунок введення приводів подовжнього і вертикального переміщення рухомої рами, переміщення ріжучих інструментів і приводів притиснення труби, а також іншого конструктивного виконання основи, рухомої рами, різцетримачів з різальним інструментом і системи керувння і іншого їх зв'язку між собою і з системою керувння забезпечуються розширення технологічних можливостей і підвищення продуктивності установки при одночасному забезпеченні її компактності, поліпшенні якості обробки зовнішньої поверхні труб і підвищенні рівня автоматизації операцій зняття грата. Поставлена задача вирішується тим, що в установці для зняття зовнішнього грата, що містить основу і розміщену на ньому рухому раму, на якій змонтовані різцетримачі з різальним інструментом і привід їх обертання, і систему керувння, зв'язану із зазначеним приводом, згідно корисної моделі основа виконана у вигляді вертикальних стійок, жорстко з'єднаних між собою нижніми і верхніми горизонтальними балками, і включає подовжні напрямні, закріплені на двох протилежних нижніх горизонтальних балках, і приводи подовжнього і вертикального переміщення, рухома рама 5 19811 6 встановлена на подовжніх напрямних з можливісщення був виконаний у вигляді гідроциліндра. тю подовжнього і вертикального переміщення відДоцільно, щоб привід вертикального переміносно основи за допомогою зазначених приводів і щення був виконаний у вигляді гвинтового механівиконана у вигляді платформи з жорстко закріплезму, змонтованого на основі уздовж його вертиканими на ній вертикальними стійками, розташовальної осі. ними попарно на протилежних сторонах платфорДоцільно, щоб привід радіального переміщенми симетрично відносно подовжньої осі основи і ня був виконаний у вигляді пневмоциліндра, шток з'єднаними у верхній частині горизонтальними якого обладнаний упором. балками, між горизонтальними балками і платфоДоцільно, щоб привід обертання був виконармою розміщені вертикальні напрямні, між якими ний у вигляді реверсивного мотор-редуктора для змонтована опорна плита із закріпленими на ній підведення або відведення ріжучого інструменту робочим колесом і приводом його обертання, до оброблюваної труби шляхом кутового повороту встановлена з можливістю переміщення уздовж затисків при обертанні валу мотор-редуктора відвертикальних напрямних для забезпечення співвіповідно по годинній або проти годинникової стрілсного положення робочого колеса з оброблюваки на один оборот при взаємодії поворотного ваною трубою і фіксації в цьому положенні відносно желя з упором приводу радіального переміщення. основи і платформи, різцетримачі з різальним інДоцільно, щоб ріжучі інструменти були викострументом змонтовані на робочому колесі за донані у вигляді різців, закріплених на різцетримачах помогою затисків, симетрично розміщених відносіз збільшенням вильоту кожного подальшого різця но вертикальної і горизонтальної осей робочого по периметру робочого диска на 3-5мм, при цьому колеса з можливістю одночасного обертання з ним різці і робоче колесо виконані змінними. і кутового повороту відносно вертикальної осі, а Доцільно, щоб установка додатково містила опорна плита обладнана нижньою і верхньою недатчик наявності грата, закріплений на основі песучими площадками, нижня з яких з'єднана з приред підтримуючим роликом з боку подачі труби. водом вертикального переміщення, а на верхній Для підвищення рівня автоматизації операції змонтований привід радіального переміщення, видалення грата система керувння містить пульт встановлений з можливістю взаємодії із затисками керувння установкою, що включає дисплей, кнопдля кутового повороту ріжучих інструментів при кову панель і програмований логічний контролер, обертанні робочого колеса, при цьому в середній пов'язані з приводом обертання, приводом почастині робочого колеса і опорної плити уздовж їх довжнього переміщення, приводом радіального подовжніх осей виконані крізні отвори для розміпереміщення, пневматичними притисками, кінцещення оброблюваної труби, на основі по обидві вими вимикачами і датчиком наявності грата. сторони від робочого колеса закріплені підтримуДля підвищення рівня механізації операцій виючі ролики, на верхніх горизонтальних балках осдалення грата установка додатково містить коннови над підтримуючими роликами змонтовані тейнер для збору відходів, виконаний, наприклад, пневматичні притиски, встановлені з можливістю у вигляді металевого ящика, встановленого на взаємодії з оброблюваною трубою, зазначені прирухомій рамі під робочим колесом, і захисні екравід подовжнього переміщення, робоче колесо, ни, закріплені на рухомій рамі по периметру робопривід радіального переміщення і пневматичні чого колеса в зоні зняття грата. притиски містять кінцеві вимикачі, а система керуПропонована конструкція установки для знятвння додатково зв'язана з приводом подовжнього тя зовнішнього грата на трубах за рахунок іншого переміщення, приводом радіального переміщення, виконання і компактного взаємного розміщення пневматичними притисками і кінцевими вимикачаелементів основи і рухомої рами, оснащення кожми з можливістю керувння операціями зняття і ного з них швидкодійними приводами, взаємозв'явидалення грата в налагоджувальному режимі і в заними з системою керувння, і наявність комплекнапівавтоматичному режимі при обробці труб різту змінних різцетримачів з різальним інструментом ного діаметру. суттєво розширює технологічні можливості устаКрім того, робоче колесо складається з кріпиновки і дозволяє в напівавтоматичному режимі льного диска і закріплених на його протилежних проводити операції зняття грата на трубах різного сторонах робочого диска і зубчатого вінця, при діаметру і з різною товщиною стінок у складі автоцьому затиски різцетримачів з різальним інструматизованих потокових ліній зварки трубних секцій ментом змонтовані на робочому диску, а зубчатий із одночасним забезпеченням якості обробки зоввінець з'єднаний з приводом обертання за допонішньої поверхні труб і підвищенні рівня автоматимогою шестерні, закріпленої на його вихідному зації операцій зняття грата. Зв'язок приводів повалу. довжнього переміщення, обертання і радіального Одночасно робочий диск містить обмежувальпереміщення, а також пневматичних притисків ні упори, закріплені на ньому по обох сторонах від труби з системою керувння, устаткування їх датчикожного затиску, а кожний затиск різцетримачів ками кінцевого положення забезпечує оперативобладнаний поворотним важелем, виступаючим за ний контроль якості обробки поверхні труб при зовнішній діаметр робочого колеса і змонтованим знятті грата в автоматичному режимі. Для підвина ньому з можливістю кутового повороту між общення рівня механізації операцій видалення грата межувальними упорами, при цьому привід радіаустановка додатково містить контейнер для збору льного переміщення встановлений з можливістю відходів і захисні екрани. взаємодії із затисками за допомогою згаданих поСутність корисної моделі пояснюється предворотних важелів. ставленими фігурами креслення: Доцільно, щоб привід подовжнього переміфіг.1 - загальний вид установки; 7 19811 8 фіг.2 - вид А на фіг.1 (загальний вид установтиску 18 за допомогою болтів 25 закріплені повоки, вид спереду); ротні важелі 26, одна із сторін яких виконана з фіг.3 - переріз Б-Б на фіг.2; двома криволінійними виступами,що виходять за фіг.4 - вид В на фіг.3 (робоче колесо з різцезовнішній діаметр робочого колеса 14. Затиски 18 тримачами і різальним інструментом); з поворотними важелями 26 змонтовані на робофіг.5 - переріз Г-Г на фіг.3; чому диску 23 за допомогою осі (не показана), зафіг.6 - вид Д на фіг.1; кріпленої стопорними гайками (не показані), з мофіг.7 - принципова схема системи керувння. жливістю їх кутового повороту, наприклад, на 45° Установка для зняття зовнішнього грата на між обмежувальними упорами 27 і 28 відносно трубах містить основу 1, виконану у вигляді просвертикальної осі робочого колеса 14. Обмежуваторової збірно-зварної конструкції, яка складаєтьльні упори 27 і 28 закріплені на робочому диску 23. ся з чотирьох вертикальних стійок 2, жорстко з'єдЗубчатий вінець 24 з'єднаний з кріпильним диском наних між собою нижніми 3 і верхніми 4 і за допомогою чотирьох опорних роликів 29 закрігоризонтальними балками. На двох протилежних плений на опорній плиті 13. На зубчатому вінці 24 нижніх 3 горизонтальних балках закріплені дві попередбачена установка змінних робочих коліс 14 довжні напрямні 5, виконані з лінійними підшипнизалежно від діаметру оброблюваних труб. ками (не показані). Між подовжніми напрямними 5 Ріжучі інструменти 17 виконані у вигляді різців, на нижній 3 горизонтальній балці закріплений призакріплених на різцетримачів 16 із збільшенням від подовжнього переміщення 6, виконаний у вивильоту кожного подальшого різця по периметру гляді гідроциліндра. На основі 1 уздовж його верробочого диска 23 на 3-5мм. Різці 17 кріпляться в тикальної осі встановлений привід вертикального різцетримачах 16 одним регулювальним 30 і двопереміщення 7, виконаний у вигляді гвинтового ма затискними 31 болтами. Різці 17 виконані змінмеханізму. На подовжніх напрямних 5 розміщена ними. Підведення різців 17 до труби і відведення рухома рама 8, пов'язана з приводом подовжнього від неї здійснюється шляхом взаємодії упору (не переміщення 6 і приводом вертикального переміпоказаний), закріпленого на штоку приводу радіащення 7. льного переміщення 22, з поворотними важелями Рухома рама 8 виконана у вигляді платформи 26 при одночасному обертанні робочого колеса 14 9 з жорстко закріпленими на ній вертикальними по годинній або проти годинникової стрілки на стійками 10, розташованими попарно на протилеодин оборот. Робочі колеса 14 виконані в трьох жних сторонах платформи 9 симетрично відносно комплектах з різними типорозмірами з урахуванподовжньої осі основи 1. Вертикальні стійки 10 ням діаметру оброблюваних труб: перший комз'єднані у верхній частині горизонтальними балкаплект для труб діаметром 83-114мм, другий - 159ми 11. Між горизонтальними балками 11 і платфо168мм і третій -273-325мм. рмою 9 розміщені вертикальні напрямні 12, між Привід обертання 15 ріжучих інструментів 17 якими змонтована опорна плита 13 із закріпленивиконаний у вигляді реверсивного моторми на ній робочим колесом 14 і приводом його редуктора, з'єднаного з робочим колесом 14 за обертання 15. Опорна плита 13 встановлена з допомогою зубчатого вінця 24 і шестерні 32, закріможливістю переміщення уздовж вертикальних пленої на його вихідному валу. напрямних 12 для забезпечення співвісного полоНа основі 1 по обидві сторони від робочого коження робочого колеса 14 з оброблюваною трулеса 14 на горизонтальних балках 33 закріплено бою і фіксації в цьому положенні відносно основи два підтримуючі ролики 34. На верхніх 4 горизон1 і пов'язаної з ним платформи 9. В середній частальних балках основи 1 над підтримуючими ротині робочого колеса 14 уздовж його подовжньої ликами 34 змонтовано два пневматичні притиски осі і осі опорної плити 13 виконані крізні отвори 35, встановлених з можливістю взаємодії з обробдля розміщення оброблюваної труби. люваною трубою. На горизонтальній балці 33 осРізцетримачі 16 з різальним інструментом 17 нови 1 перед підтримуючим роликом 34 з боку змонтовані на робочому колесі 14 за допомогою подачі труби за допомогою кронштейнів 36 і важезатисків 18, симетрично розміщених відносно верля 37 встановлений датчик наявності грата 38, тикальної і горизонтальної осей робочого колеса обладнаний прапорцем 39. 14 з можливістю одночасного обертання з ним і Установка обладнана контейнером 40 для кутового повороту відносно вертикальної осі. збору відходів, розміщеним на рухомій рамі 8 під Опорна плита 13 обладнана нижньою 19 і верробочим колесом 14, і захисними екранами 41, хньої 20 несучими площадками . Нижня несуча закріплені на рухомій рамі 8 по периметру робочоплощадка 19 з'єднана з приводом вертикального го колеса 14 в зоні зняття грата. Для керувння переміщення 7. На верхній несучій площадці 20 за приводом подовжнього переміщення 6 рухомої допомогою траверси 21 змонтований привід радірами 8 на основі 1 встановлена гідростанція 42. ального переміщення 22, виконаний у вигляді пнеКерувння установкою здійснюється з пульта вмоциліндра, шток якого обладнаний упором (не керувння (не показаний), який входить до складу показаний), встановленим з можливістю взаємодії системи керувння і пов'язаний з приводами 6, 15, із затисками 18 для кутового повороту ріжучих 22 і пневматичними притисками 35. інструментів 17 при обертанні робочого колеса 14. Система керувння побудована на базі контроРобоче колесо 14 складається з кріпильного лера з інтерфейсом розподіленої периферії і підкдиска (не показаний) і закріплених на його протилючена до трифазної мережі електроживлення з лежних сторонах робочого диска 23 і зубчатого напругою 380В частотою 50Гц. Керувння установвінця 24. Кріпильний і робочий 23 диски з'єднано кою здійснюється за допомогою пульта керувння між собою чотирма затисками 18. На кожному за43, який містить дисплей 44, кнопковий пульт 45 із 9 19811 10 світлосигнальними лампами і програмований логіклад, робоче колесо може містити інше конструкчний контролер 46. тивне виконання різцетримача з різальними елеОб'єктами керувння є: мотор-редуктор привоментами. ду обертання 15 робочого колеса 14, електромагРобота установки здійснюється таким чином. ніти пневморозподілювачі (не показані) пневматиВключення силових ланцюгів установки і ланчних притисків 35 і привід радіального цюгів керувння проводиться з кнопкового пульта переміщення 22 різцетримачів 16 з різальними 45. Живлення одержують блок живлення (не покаінструментами 17 на робочому колесі 14, електрозаний) вхідних і вихідних ланцюгів, контролер 46, магніти гідророзподілювачів не показані) гідроцидисплей 44 і кнопковий пульт 45. ліндра 6 приводу подовжнього переміщення рухоДля запуску режиму наладки пакетним перемої рами 8. Для керувння вказаними об'єктами микачем з кнопкового пульта 45 встановлюється передбачені наступні датчики положення, виконані один з інтервалів діаметрів оброблюваних труб у вигляді кінцевих вимикачів (не показані): вихідно(83...114, 159...219 або 273...325), після чого на го і кінцевого положень гідроциліндра 6 приводу цьому ж пульті відповідний перемикач перемикаподовжнього переміщення рухомої рами 8, привоється в положення "Наладка". Програма переходу радіального переміщення 22, кінцевого полодить в налагоджувальний режим, про що на диспження робочого колеса 14 і кінцевого положення леї 44 висвічується текстове повідомлення. двох пневматичних притисків 35. Пульт керувння Шляхом послідовного включення кнопок на кноп43 взаємозв'язаний з гідростанцією 42, а також ковому пульті 45 здійснюють наладку параметрів пов'язаний з вказаними датчиками кінцевого покоординат вихідних і кінцевих положень двох пнеложення. Система керувння установкою забезпевматичних притисків 35, відповідних координат чує: приводу радіального переміщення 22 різцетрима- включення силових ланцюгів установки; чів 16 з різальними інструментами 17 на робочому - налагоджувальний режим роботи, при якому колесі 14 і приводу подовжнього переміщення 6 залежно від діаметру оброблюваних труб задарухомої рами 8, а також швидкості руху приводу 6 ються частота обертання робочого колеса 14 з подовжнього переміщення і частоти обертання різальними інструментами 17, координати вихідробочого колеса 14. Встановлені параметри висвіних і кінцевих положень двох пневматичних притичуються на дисплеї 44 і заносяться в контролер 46 сків 35, відповідних положень приводу радіального у вигляді управляючих команд для вибраного інтепереміщення 22 різцетримача 16 з різальними рвалу діаметрів оброблюваних труб. Основні поінструментами 17 на робочому колесі 14 і приводу ложення механізмів контролюються світлосигна6 подовжнього переміщення рухомої рами 8, а льними лампами на кнопковому пульті 45. також лінійної швидкості руху приводу подовжньоНаладка завершується установкою робочого колего переміщення 6; са 14 в вихідне положення: пневматичні притиски - напівавтоматичний режим роботи при вико35 і привід радіального переміщення 22 знахонанні операцій по зняттю грата із зовнішньої поведяться в крайньому повернемо положенні, рухома рхні труб, у тому числі контролю величини зусилля рама 6 з робочим колесом 14 за допомогою прина ріжучих інструментах 17, частоти обертання і воду подовжнього переміщення 6 відведені в швидкості подовжнього переміщення робочого крайнє ліве положення. колеса 14, а також повернення його з різальними Операції по зняттю грата проводяться в наінструментами 17 в вихідне положення; ступній послідовності. Труба по роликах 34 пода- захисні блокування установки, у тому числі ється на установку після зняття внутрішнього гравідключення запуску приводів подовжнього перета. З кнопкового пульта 45 включається режим міщення 6 і обертання 15 при роботі в налагоджу"Зняття грата". Подальші операції проводяться в вальному режимі, відключення операцій подовжнапівавтоматичному режимі. З кнопкового пульта нього переміщення при нештатних положеннях 45 включаються привід гідростанції 42 і пневматипневматичних притисків 35; чні притиски 35. Після фіксації положення труби - витримку в часі при переходах між операціяпневматичними притисками 35 на роликах 34 по ми, у тому числі витримку, необхідну для здійссигналу реле тиску (не показано), розміщеного на нення повного обороту робочого колеса 14 в регідростанції 42, проводиться подача ріжучих інжимі підведення ріжучого інструменту 17, рівну 12 струментів 17, для чого включаються привід радіз, витримку, необхідну для повної зупинки приводу ального переміщення 22 різцетримачів 16 і привід обертання 15 робочого колеса 14 в напівавтомаобертання 15 робочого колеса 14, який по сигналу тичному режимі, яка дорівнює 17 с; кінцевого вимикача, розміщеного на приводі раді- аварійну зупинку роботи при виконанні будьального переміщення 22, здійснює із заданою якого із зазначених режимів. швидкістю один оборот робочого колеса 14 проти Описана в даному прикладі і представлена на годинникової стрілки для підведення ріжучих інкресленні конструкція установки для зняття зовніструментів 17 до труби. Після повної зупинки пришнього грата на трубах не є єдино можливою для воду обертання 15 і відповідної витримки в часі досягнення вищезгаданого технічного результату і привід радіального переміщення 22 відводиться в не виключає інших варіантів її виконання, які місвихідне верхнє положення, послідовно включатять сукупність конструктивних ознак. Наприклад, ються привід обертання 15 (за годинниковою стріпривід подовжнього переміщення може мати інлкою) і привід подовжнього переміщення 6 робочоший тип силового повідного пристрою. Наприклад, го колеса 14. Ріжучі інструменти 17 знімають ґрат привід вертикального переміщення може бути виіз зовнішньої поверхні труби при заданих параметконаний у вигляді гідравлічного циліндра. Наприрах робочої швидкості обертання і робочої по 11 19811 12 довжньої подачі. На дисплеї 44 висвічуються веграта, поступають в контейнер 40. Робоча зона личини частоти обертання робочого колеса 14, установки в процесі її роботи ізолюється захиснипоточний і максимально допускається моменти на ми екранами 41. валу приводу обертання 15. Програмою блокування передбачено, що після При перевищенні на вихідному валу приводу трьох відключень приводу обертання 15, пов'язаобертання 15 моменту, що максимально допусканих з перевищенням моменту на валу моторється, подовжнє переміщення рухомої рами 8 і редуктора, відбувається зупинка робочої операції обертання робочого колеса 14 автоматично коротзняття грата в напівавтоматичному режимі, про що кочасно зупиняються. Оператор з кнопкового на дисплеї 44 висвічується текстове повідомлення: пульта 45 зменшує швидкість подачі на приводі "Момент на валу двигуна більше норми". Запуск подовжнього переміщення 6, після чого повторно операції повернення приводів установки в вихідне включається привід обертання 15. Виконання опеположення проводиться з кнопкового пульта 45. рації зняття грата контролюється за допомогою Виконання програми в будь-якому режимі росвітлосигнальних ламп, розміщених на кнопковому боти установки повністю припиняється і всі подапульті 45. Операція зняття грата автоматично зальші операційні кроки відміняються після введення кінчується по сигналу кінцевого вимикача при докоманди "Аварійний стоп". Після цього відбуваєтьсягненні приводом подовжнього переміщення 6 ся відключення всіх ланцюгів керувння установкінцевого положення. В цій позиції приводи 6 і 15 кою. зупиняються, висувається шток приводу радіальУстановка дозволяє проводити зняття внутріного переміщення 22 різцетримачів 16, включаєтьшнього грата на трубах діаметром 89, 114, 159, ся привід обертання 15, робоче колесо 14 виконує 168, 219, 273 і 325мм з товщиною стінки від 6 до один оборот за годинниковою стрілкою, ріжучі ін20мм. струменти 17 відводяться від труби, після чого Конструкція, що заявляється, дозволяє розпривід 22 переводиться в вихідне верхнє полоширити технологічні можливості і суттєво підвищиження. Подальше повернення механізмів установти продуктивність установки для зняття зовнішньоки в вихідне положення здійснюється після натисго грата на трубах в порівнянні з відомою нення на кнопковому пульті 45 відповідної кнопки, конструкцією при одночасному забезпеченні якості після чого включається привід гідростанції 42, обробки їх зовнішньої поверхні і підвищенні рівня спрацьовує привід подовжнього переміщення 6 і автоматизації операцій зняття грата. При цьому робоче колесо 14 переводиться в вихідне полосистема керувння, контролю і блокувань установки ження, пневматичні притиски 35 відводяться від забезпечують зручну і безпечну роботу оператора. труби. Зупинка даного режиму проводиться автоматично. Відходи, що утворилися в процесі зняття 13 Комп’ютерна верстка Г. Паяльніков 19811 Підписне 14 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюInstallation for removing the external flash on the pipes
Автори англійськоюMotorin Artur Mykolaiovych, Maliuseiko Viktor Myronovych
Назва патенту російськоюУстановка для снятия внешнего грата на трубах
Автори російськоюМоторин Артур Николаевич, Малюсейко Виктор Миронович
МПК / Мітки
МПК: B23K 37/08
Мітки: зняття, трубах, зовнішнього, установка, грату
Код посилання
<a href="https://ua.patents.su/7-19811-ustanovka-dlya-znyattya-zovnishnogo-gratu-na-trubakh.html" target="_blank" rel="follow" title="База патентів України">Установка для зняття зовнішнього грату на трубах</a>
Установка для зняття внутрішнього грату на трубах
Номер патенту: 19810
Опубліковано: 15.12.2006
Автори: Моторін Артур Миколайович, Малюсейко Віктор Миронович, Омельченко Володимир Анатолійович
МПК: B23K 37/08
Мітки: зняття, установка, трубах, внутрішнього, грату
Формула / Реферат:
1. Установка для зняття внутрішнього грату на трубах, що містить основу із змонтованими на ній штангою і приводом для її подовжнього переміщення, оправку з різальними елементами, з'єднану з штангою і оснащену напрямним наконечником, і систему керування, при цьому оправка з різальними елементами і напрямний наконечник виконані з можливістю співвісного розміщення усередині труби за допомогою центрувальних вальців, а система керування...
Пристрій для зняття зовнішнього грату
Номер патенту: 64590
Опубліковано: 16.02.2004
Автори: Малінін Альберт Леонідович, Іткін Олександр Феліксович
МПК: B23C 3/12
Мітки: пристрій, зовнішнього, зняття, грату
Формула / Реферат:
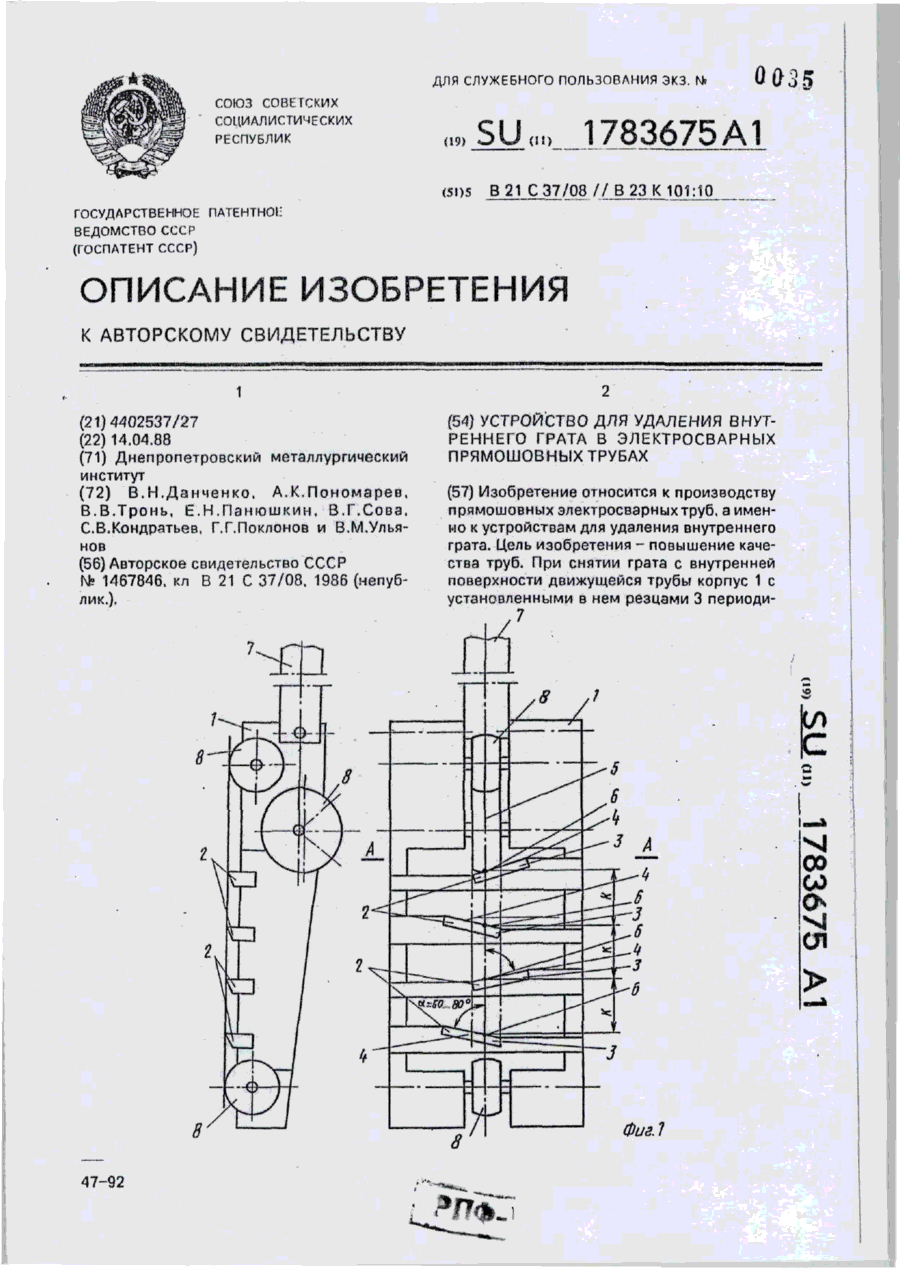
Пристрій для зняття зовнішнього грату, що містить кільцевий рознімний корпус із механізмом фіксації і зубчатим вінцем, що має встановлений за допомогою ведучої шестерні, опорних роликів і копіювального механізму, візок з приводом переміщення і механізмом подачі, опозитно розміщеними інструментальними головками, слідкуючими гідроциліндрами і слідкуючими золотниками, який відрізняється тим, що слідкуючий гідроциліндр з’єднує одночасно слідкуючі...
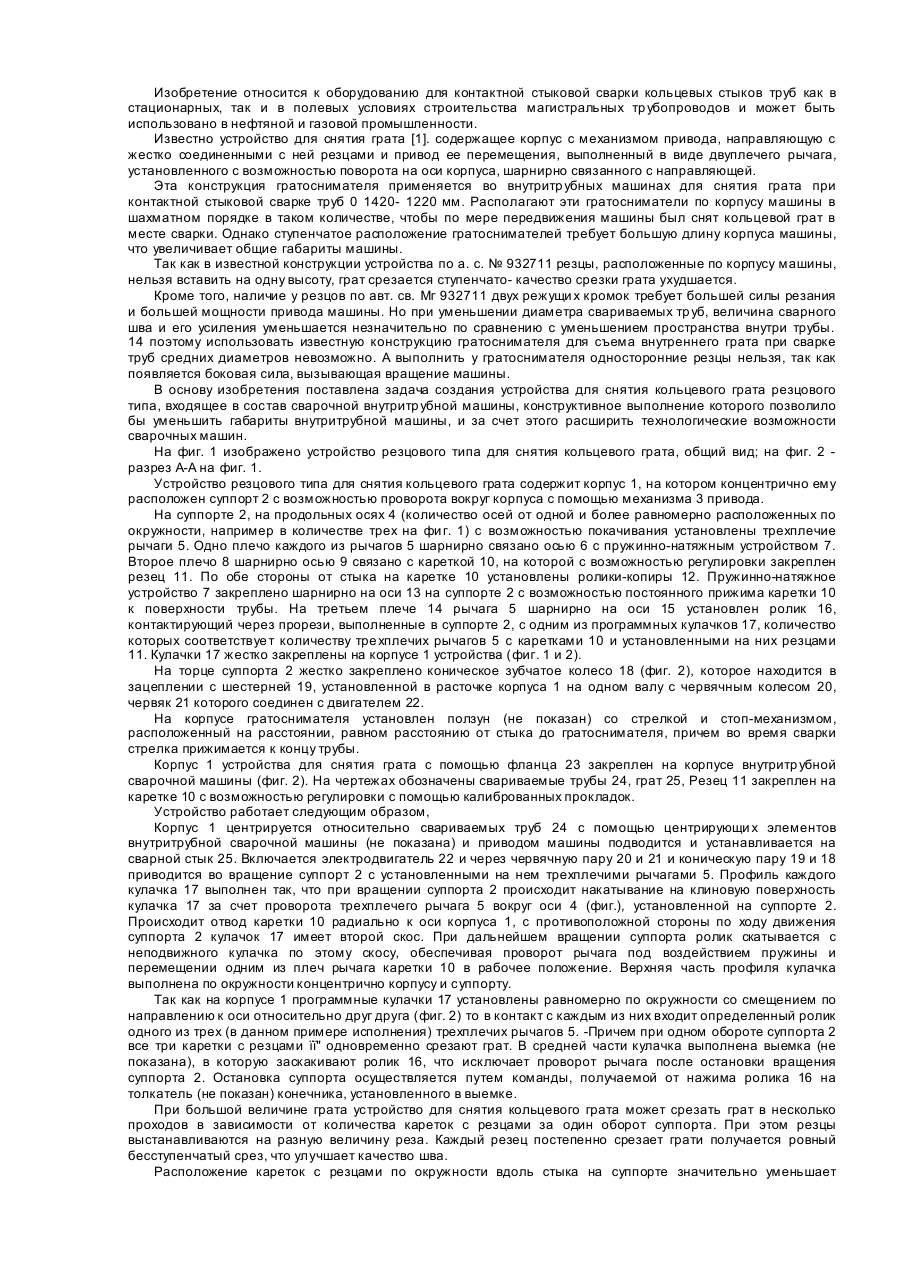
Пристрій вилучення внутрішнього грату в електрозварювальних прямошовних трубах
Номер патенту: 24101
Опубліковано: 31.08.1998
Автори: Поклонов Геннадій Гаврилович, Пономарьов Анатолій Костянтинович, Данченко Валентин Миколайович, Сова Василь Гаврилович, Ульянов Віктор Михайлович, Кондратьєв Сергій Валентинович, Панюшкин Євгеній Миколайович, Тронь Валентин Вікторович
МПК: B21C 37/08, B23K 101/10
Мітки: прямошовних, пристрій, грату, внутрішнього, трубах, вилучення, електрозварювальних
Текст:
...относительно режущих кромок обоих половин, развернутых в разные стороны резцов; на фиг. 4 - схема силового взаимодействия резцов 10 со срезаемым гратом, когда смещение шва относительно вертикальной плоскости симметрии режущих кромок обоих половин, развернутых в разные стороны резцов, превышает 0,25 величины перекрытия режущих 15 кромок резцов. На корпусе 1 многорезцового инструмента 2 размещено четное количество резцов 3 с равным шагом...
Пристрій різцевого типу для зняття кільцевого грату
Номер патенту: 18822
Опубліковано: 25.12.1997
Автори: Толдін Анатолій Андрійович, Сахарнов Василь Олексійович, Галян Борис Панасович, Мірошниченко Олександр Петрович, Головачов Віктор Миколайович, Кучук-Яценко Сергій Іванович
МПК: B23K 11/04
Мітки: пристрій, зняття, різцевого, типу, кільцевого, грату
Формула / Реферат:
Устройство резцового типа для снятия кольцевого грата, содержащее корпус, каретки с резцами и привод перемещения, отличающееся тем, что устройство снабжено суппортом, выполненным в виде цилиндра со сквозными пазами, установленными соосно корпусу с возможностью поворота относительно продольной оси последнего, пружинно-натяжными механизмами, трехплечными рычагами, шарнирно закрепленными на суппорте с возможностью покачивания в плоскости,...
Пристрій для зняття грату при контактно-стиковому зварюванні деталей
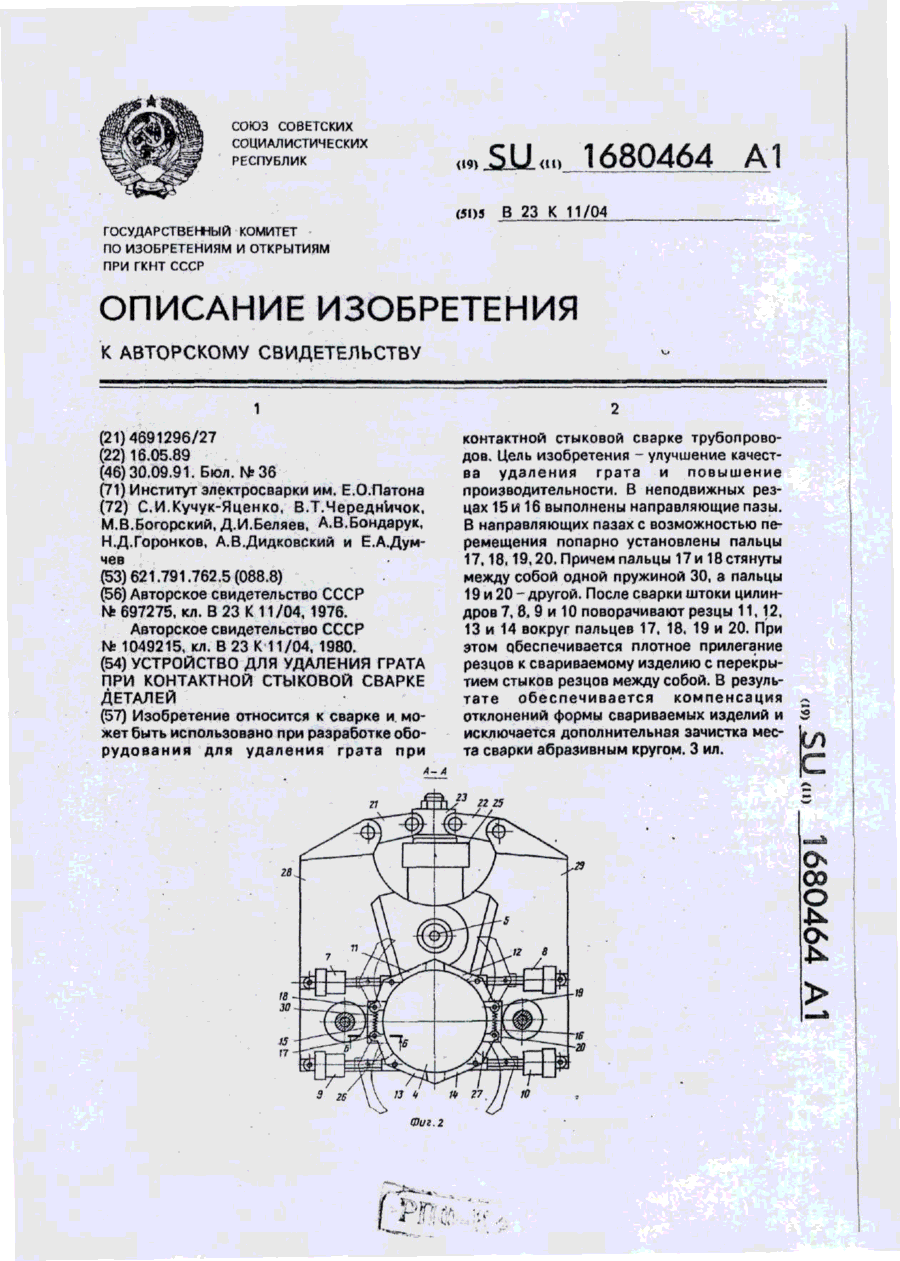
Номер патенту: 1611
Опубліковано: 25.10.1994
Автори: Думчев Євген Олександрович, Горонков Микола Дмитрович, Бондарук Андрій Всеволодович, Череднічок Віталій Тимофійович, Кучук-Яценко Сергій Іванович, Беляєв Данило Іванович, Богорський Михайло Володимирович, Дідковський Олександр Володимирович
МПК: B23K 11/04
Мітки: зварюванні, грату, пристрій, зняття, контактно-стиковому, деталей
Формула / Реферат:
Устройство для удаления грата при контактной стыковой сварке деталей, преимущественно труб, содержащее разъемный корпус, выполненный в виде клещевого зажима, четыре цилиндра, установленные попарно на каждой из частей корпуса, шарнирно закрепленные на штоках цилиндров подвижные резцы и цилиндр зажатия, отличающееся тем, что, с целью улучшения качества удаления грата и повышения производительности, оно снабжено жестко закрепленными на...
Попередній патент: Установка для зняття внутрішнього грату на трубах
Наступний патент: Премікс
Випадковий патент: Зубний імплантат