Модуль переміщення вакуум-захоплюючого пристрою
Номер патенту: 77580
Опубліковано: 25.02.2013
Автори: Кривопляс-Володіна Людмила Олександрівна, Гавва Олександр Миколайович, Богославський Ігор Олегович, Валіулін Геннадій Романович

Формула / Реферат
Модуль переміщення вакуумз-ахоплюючого пристрою, що містить привід горизонтального переміщення вакуум-захоплюючого пристрою, привід вертикального переміщення вакуумзахоплюючого пристрою, вакуум-захоплюючий пристрій, який відрізняється тим, що як привод горизонтального переміщення вакуум-захоплюючого пристрою використовується безштоковий пневмоциліндр з магнітним датчиком положення каретки, який кріпиться консольно на поворотний стіл машини/робота, на стандартну каретку безштокового пневмоциліндра за допомогою болтів кріпиться спеціальна каретка для розміщення на ній приводу вертикального переміщення вакуум-захоплюючого пристрою, який виконаний у вигляді пневмоциліндра двосторонньої дії, який передньою кришкою, за допомогою стандартних кріпильних елементів - лап кріпиться до спеціальної каретки, пневмоциліндр приводу вертикального переміщення вакуум-захоплюючого пристрою монтується разом з напрямними, які запобігають провертанню штока, на який жорстко кріпиться платформа з розташованим на ній вакуум-захоплюючим пристроєм, останній виконаний у вигляді компактного вакуум-ежектора, пружинних плунжерів, сильфонних вакуум-присосок 1,5 гофри, існує два варіанти розташування вакуум-ежектора: безпосередньо у платформі та на ній, платформа має відповідні пази для зміни розташування вакуум-присосок.
Текст
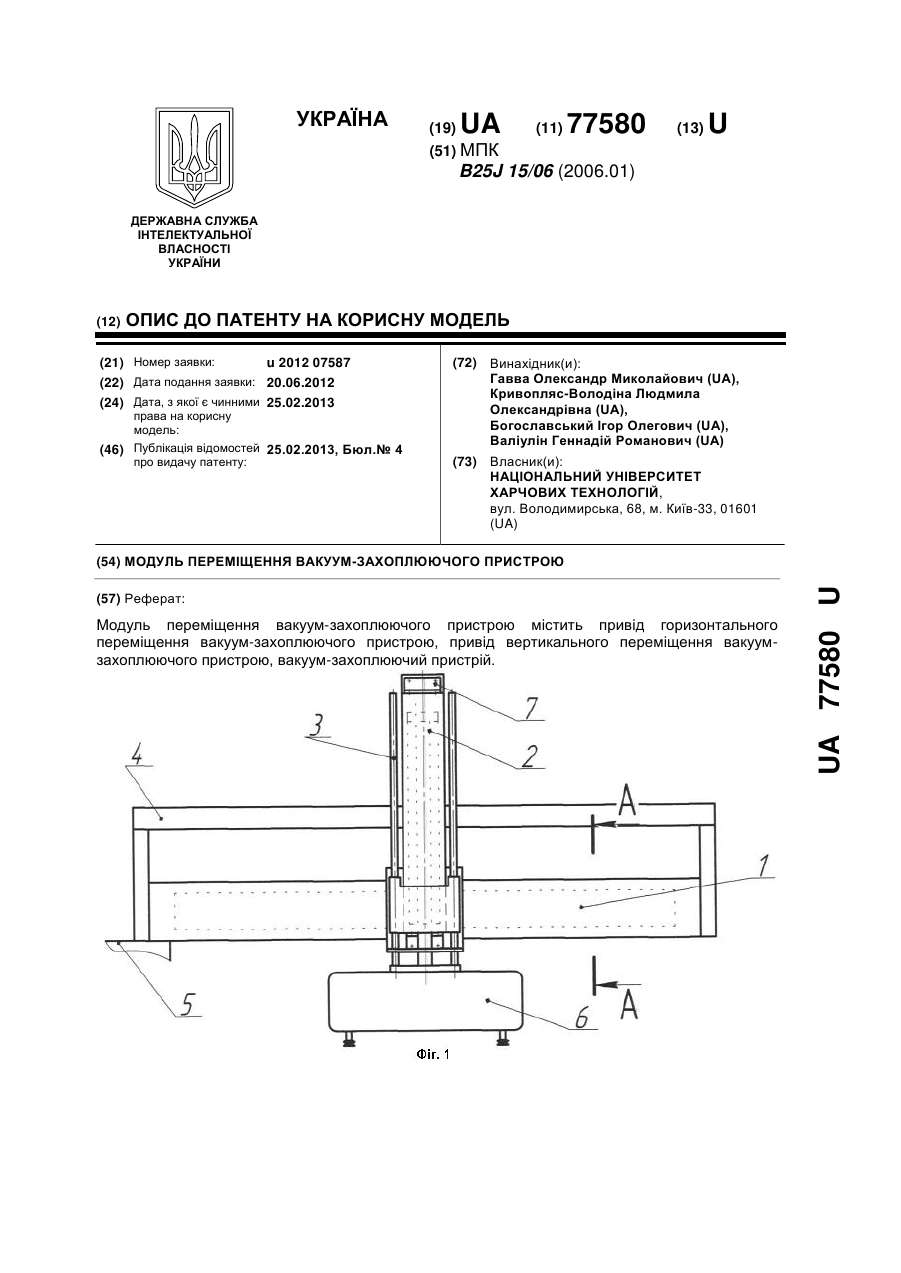
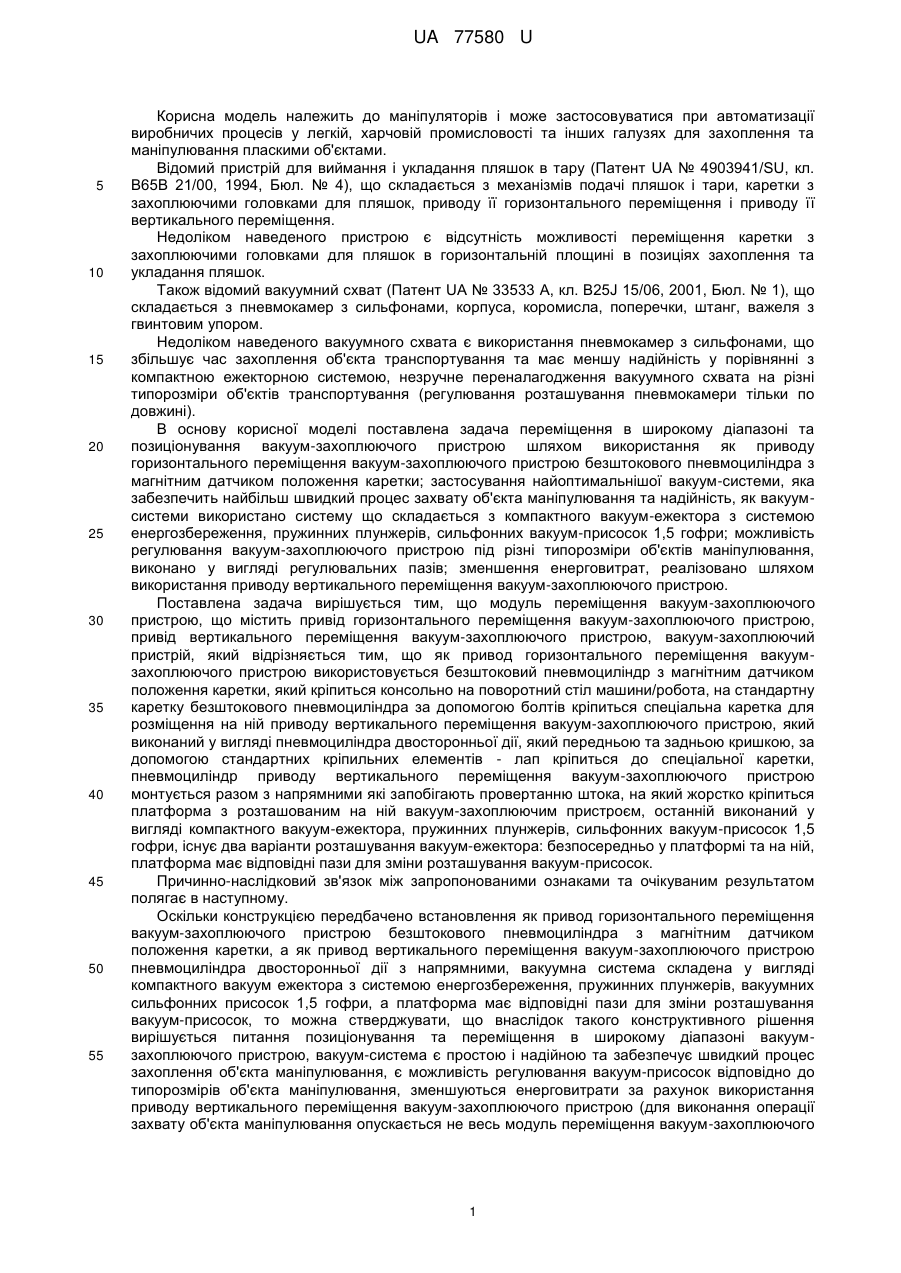
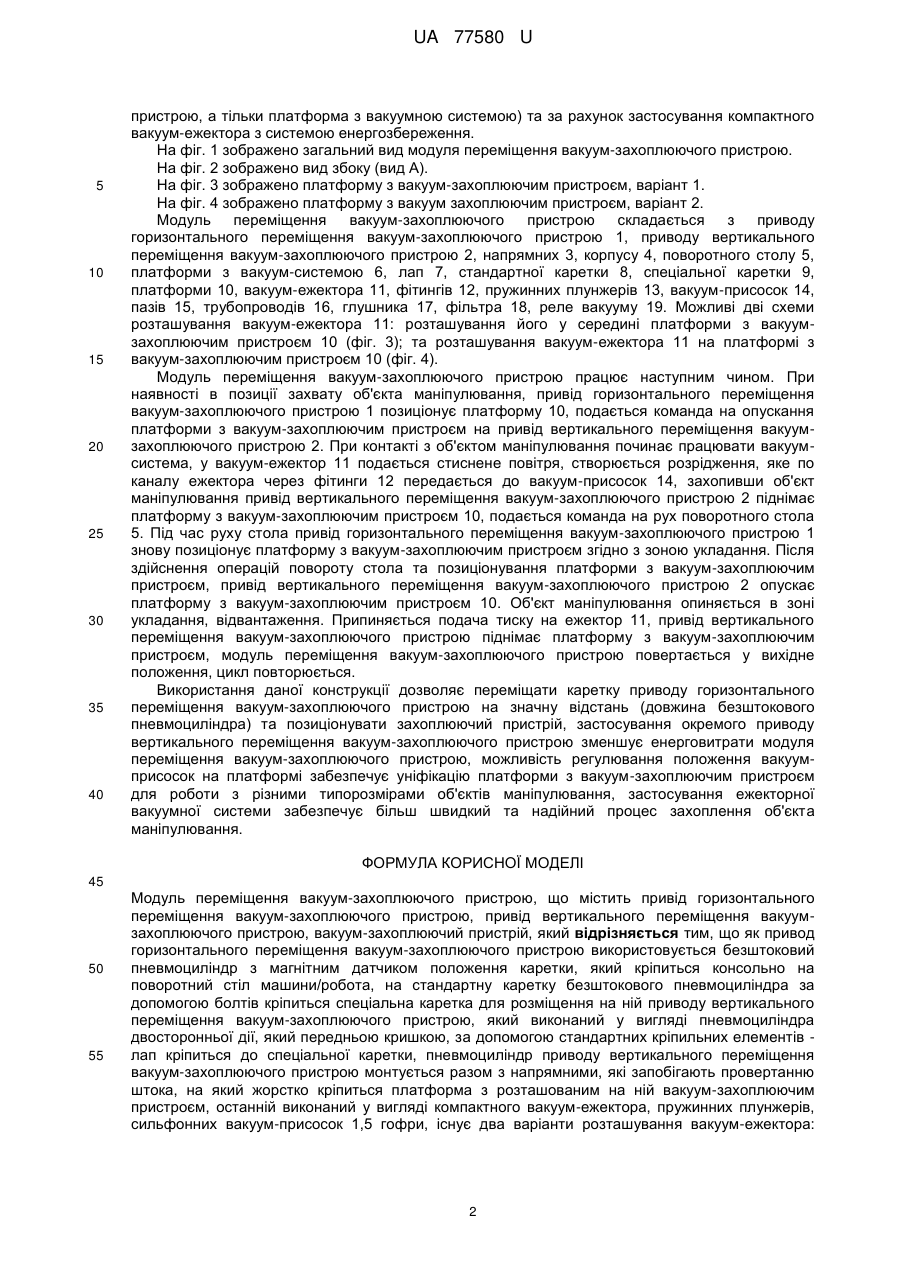
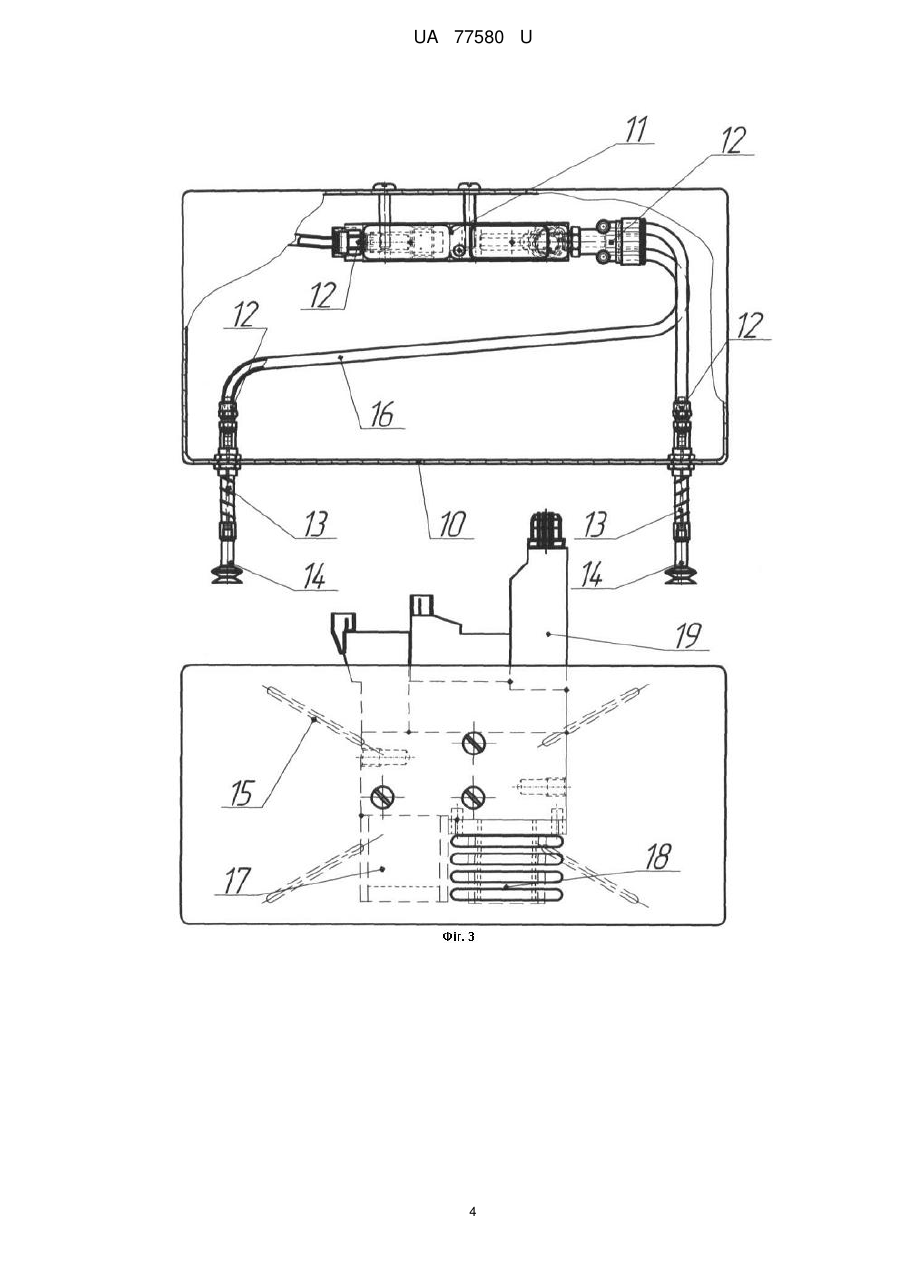
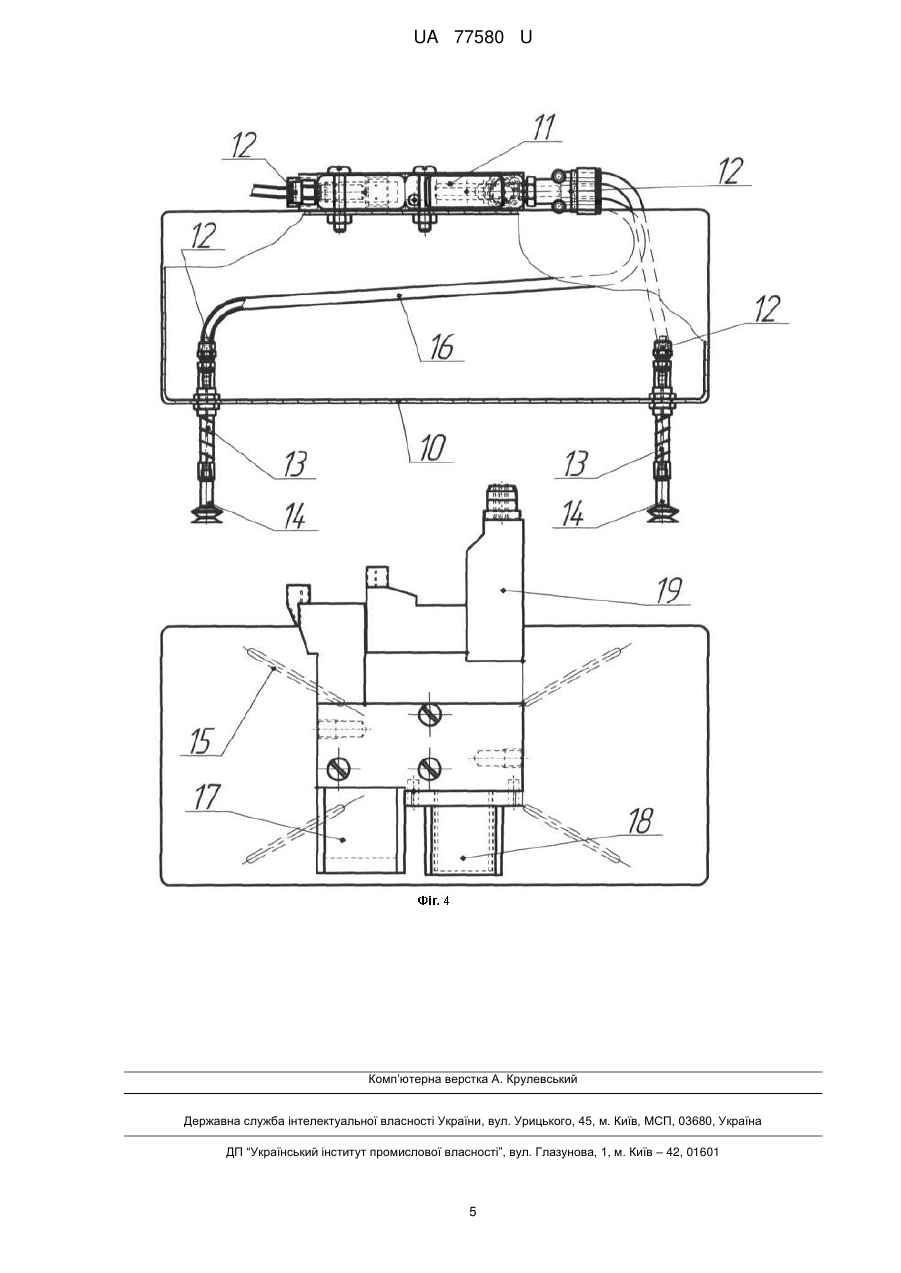
Реферат: Модуль переміщення вакуум-захоплюючого пристрою містить привід горизонтального переміщення вакуум-захоплюючого пристрою, привід вертикального переміщення вакуумзахоплюючого пристрою, вакуум-захоплюючий пристрій. UA 77580 U (54) МОДУЛЬ ПЕРЕМІЩЕННЯ ВАКУУМ-ЗАХОПЛЮЮЧОГО ПРИСТРОЮ UA 77580 U UA 77580 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до маніпуляторів і може застосовуватися при автоматизації виробничих процесів у легкій, харчовій промисловості та інших галузях для захоплення та маніпулювання пласкими об'єктами. Відомий пристрій для виймання і укладання пляшок в тару (Патент UA № 4903941/SU, кл. В65В 21/00, 1994, Бюл. № 4), що складається з механізмів подачі пляшок і тари, каретки з захоплюючими головками для пляшок, приводу її горизонтального переміщення і приводу її вертикального переміщення. Недоліком наведеного пристрою є відсутність можливості переміщення каретки з захоплюючими головками для пляшок в горизонтальній площині в позиціях захоплення та укладання пляшок. Також відомий вакуумний схват (Патент UA № 33533 А, кл. B25J 15/06, 2001, Бюл. № 1), що складається з пневмокамер з сильфонами, корпуса, коромисла, поперечки, штанг, важеля з гвинтовим упором. Недоліком наведеного вакуумного схвата є використання пневмокамер з сильфонами, що збільшує час захоплення об'єкта транспортування та має меншу надійність у порівнянні з компактною ежекторною системою, незручне переналагодження вакуумного схвата на різні типорозміри об'єктів транспортування (регулювання розташування пневмокамери тільки по довжині). В основу корисної моделі поставлена задача переміщення в широкому діапазоні та позиціонування вакуум-захоплюючого пристрою шляхом використання як приводу горизонтального переміщення вакуум-захоплюючого пристрою безштокового пневмоциліндра з магнітним датчиком положення каретки; застосування найоптимальнішої вакуум-системи, яка забезпечить найбільш швидкий процес захвату об'єкта маніпулювання та надійність, як вакуумсистеми використано систему що складається з компактного вакуум-ежектора з системою енергозбереження, пружинних плунжерів, сильфонних вакуум-присосок 1,5 гофри; можливість регулювання вакуум-захоплюючого пристрою під різні типорозміри об'єктів маніпулювання, виконано у вигляді регулювальних пазів; зменшення енерговитрат, реалізовано шляхом використання приводу вертикального переміщення вакуум-захоплюючого пристрою. Поставлена задача вирішується тим, що модуль переміщення вакуум-захоплюючого пристрою, що містить привід горизонтального переміщення вакуум-захоплюючого пристрою, привід вертикального переміщення вакуум-захоплюючого пристрою, вакуум-захоплюючий пристрій, який відрізняється тим, що як привод горизонтального переміщення вакуумзахоплюючого пристрою використовується безштоковий пневмоциліндр з магнітним датчиком положення каретки, який кріпиться консольно на поворотний стіл машини/робота, на стандартну каретку безштокового пневмоциліндра за допомогою болтів кріпиться спеціальна каретка для розміщення на ній приводу вертикального переміщення вакуум-захоплюючого пристрою, який виконаний у вигляді пневмоциліндра двосторонньої дії, який передньою та задньою кришкою, за допомогою стандартних кріпильних елементів - лап кріпиться до спеціальної каретки, пневмоциліндр приводу вертикального переміщення вакуум-захоплюючого пристрою монтується разом з напрямними які запобігають провертанню штока, на який жорстко кріпиться платформа з розташованим на ній вакуум-захоплюючим пристроєм, останній виконаний у вигляді компактного вакуум-ежектора, пружинних плунжерів, сильфонних вакуум-присосок 1,5 гофри, існує два варіанти розташування вакуум-ежектора: безпосередньо у платформі та на ній, платформа має відповідні пази для зміни розташування вакуум-присосок. Причинно-наслідковий зв'язок між запропонованими ознаками та очікуваним результатом полягає в наступному. Оскільки конструкцією передбачено встановлення як привод горизонтального переміщення вакуум-захоплюючого пристрою безштокового пневмоциліндра з магнітним датчиком положення каретки, а як привод вертикального переміщення вакуум-захоплюючого пристрою пневмоциліндра двосторонньої дії з напрямними, вакуумна система складена у вигляді компактного вакуум ежектора з системою енергозбереження, пружинних плунжерів, вакуумних сильфонних присосок 1,5 гофри, а платформа має відповідні пази для зміни розташування вакуум-присосок, то можна стверджувати, що внаслідок такого конструктивного рішення вирішується питання позиціонування та переміщення в широкому діапазоні вакуумзахоплюючого пристрою, вакуум-система є простою і надійною та забезпечує швидкий процес захоплення об'єкта маніпулювання, є можливість регулювання вакуум-присосок відповідно до типорозмірів об'єкта маніпулювання, зменшуються енерговитрати за рахунок використання приводу вертикального переміщення вакуум-захоплюючого пристрою (для виконання операції захвату об'єкта маніпулювання опускається не весь модуль переміщення вакуум-захоплюючого 1 UA 77580 U 5 10 15 20 25 30 35 40 пристрою, а тільки платформа з вакуумною системою) та за рахунок застосування компактного вакуум-ежектора з системою енергозбереження. На фіг. 1 зображено загальний вид модуля переміщення вакуум-захоплюючого пристрою. На фіг. 2 зображено вид збоку (вид А). На фіг. 3 зображено платформу з вакуум-захоплюючим пристроєм, варіант 1. На фіг. 4 зображено платформу з вакуум захоплюючим пристроєм, варіант 2. Модуль переміщення вакуум-захоплюючого пристрою складається з приводу горизонтального переміщення вакуум-захоплюючого пристрою 1, приводу вертикального переміщення вакуум-захоплюючого пристрою 2, напрямних 3, корпусу 4, поворотного столу 5, платформи з вакуум-системою 6, лап 7, стандартної каретки 8, спеціальної каретки 9, платформи 10, вакуум-ежектора 11, фітингів 12, пружинних плунжерів 13, вакуум-присосок 14, пазів 15, трубопроводів 16, глушника 17, фільтра 18, реле вакууму 19. Можливі дві схеми розташування вакуум-ежектора 11: розташування його у середині платформи з вакуумзахоплюючим пристроєм 10 (фіг. 3); та розташування вакуум-ежектора 11 на платформі з вакуум-захоплюючим пристроєм 10 (фіг. 4). Модуль переміщення вакуум-захоплюючого пристрою працює наступним чином. При наявності в позиції захвату об'єкта маніпулювання, привід горизонтального переміщення вакуум-захоплюючого пристрою 1 позиціонує платформу 10, подається команда на опускання платформи з вакуум-захоплюючим пристроєм на привід вертикального переміщення вакуумзахоплюючого пристрою 2. При контакті з об'єктом маніпулювання починає працювати вакуумсистема, у вакуум-ежектор 11 подається стиснене повітря, створюється розрідження, яке по каналу ежектора через фітинги 12 передається до вакуум-присосок 14, захопивши об'єкт маніпулювання привід вертикального переміщення вакуум-захоплюючого пристрою 2 піднімає платформу з вакуум-захоплюючим пристроєм 10, подається команда на рух поворотного стола 5. Під час руху стола привід горизонтального переміщення вакуум-захоплюючого пристрою 1 знову позиціонує платформу з вакуум-захоплюючим пристроєм згідно з зоною укладання. Після здійснення операцій повороту стола та позиціонування платформи з вакуум-захоплюючим пристроєм, привід вертикального переміщення вакуум-захоплюючого пристрою 2 опускає платформу з вакуум-захоплюючим пристроєм 10. Об'єкт маніпулювання опиняється в зоні укладання, відвантаження. Припиняється подача тиску на ежектор 11, привід вертикального переміщення вакуум-захоплюючого пристрою піднімає платформу з вакуум-захоплюючим пристроєм, модуль переміщення вакуум-захоплюючого пристрою повертається у вихідне положення, цикл повторюється. Використання даної конструкції дозволяє переміщати каретку приводу горизонтального переміщення вакуум-захоплюючого пристрою на значну відстань (довжина безштокового пневмоциліндра) та позиціонувати захоплюючий пристрій, застосування окремого приводу вертикального переміщення вакуум-захоплюючого пристрою зменшує енерговитрати модуля переміщення вакуум-захоплюючого пристрою, можливість регулювання положення вакуумприсосок на платформі забезпечує уніфікацію платформи з вакуум-захоплюючим пристроєм для роботи з різними типорозмірами об'єктів маніпулювання, застосування ежекторної вакуумної системи забезпечує більш швидкий та надійний процес захоплення об'єкта маніпулювання. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 55 Модуль переміщення вакуум-захоплюючого пристрою, що містить привід горизонтального переміщення вакуум-захоплюючого пристрою, привід вертикального переміщення вакуумзахоплюючого пристрою, вакуум-захоплюючий пристрій, який відрізняється тим, що як привод горизонтального переміщення вакуум-захоплюючого пристрою використовується безштоковий пневмоциліндр з магнітним датчиком положення каретки, який кріпиться консольно на поворотний стіл машини/робота, на стандартну каретку безштокового пневмоциліндра за допомогою болтів кріпиться спеціальна каретка для розміщення на ній приводу вертикального переміщення вакуум-захоплюючого пристрою, який виконаний у вигляді пневмоциліндра двосторонньої дії, який передньою кришкою, за допомогою стандартних кріпильних елементів лап кріпиться до спеціальної каретки, пневмоциліндр приводу вертикального переміщення вакуум-захоплюючого пристрою монтується разом з напрямними, які запобігають провертанню штока, на який жорстко кріпиться платформа з розташованим на ній вакуум-захоплюючим пристроєм, останній виконаний у вигляді компактного вакуум-ежектора, пружинних плунжерів, сильфонних вакуум-присосок 1,5 гофри, існує два варіанти розташування вакуум-ежектора: 2 UA 77580 U безпосередньо у платформі та на ній, платформа має відповідні пази для зміни розташування вакуум-присосок. 3 UA 77580 U 4 UA 77580 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюModule for moving vacuum gripper
Автори англійськоюHavva Oleksandr Mykolaiovych, Kryvoplias-Volodina Liudmyla Oleksandrivna, Bohoslavskyi Ihor Olehovych, Valiulin Hennadii Romanovych
Назва патенту російськоюМодуль перемещения вакуум-захватного устройства
Автори російськоюГавва Александр Николаевич, Кривопляс-Володина Людмила Александровна, Богославский Игорь Олегович, Валиулин Геннадий Романович
МПК / Мітки
МПК: B25J 15/06
Мітки: переміщення, вакуум-захоплюючого, модуль, пристрою
Код посилання
<a href="https://ua.patents.su/7-77580-modul-peremishhennya-vakuum-zakhoplyuyuchogo-pristroyu.html" target="_blank" rel="follow" title="База патентів України">Модуль переміщення вакуум-захоплюючого пристрою</a>
Модуль горизонтального переміщення з безштоковими циліндрами
Номер патенту: 72161
Опубліковано: 10.08.2012
Автори: Якимчук Микола Володимирович, Мазур Богдан Васильович, Іванова Людмила Іллівна
МПК: F15B 9/00, F15B 13/00
Мітки: модуль, горизонтального, циліндрами, безштоковими, переміщення
Формула / Реферат:
Модуль горизонтального переміщення з безштоковими циліндрами містить корпус профільного перерізу з повздовжнім прорізом і кришками, поршень, з'єднаний з кареткою, який відрізняється тим, що пристрій має два безштокових циліндри, кожен з яких виконано у вигляді корпусу профільного перерізу з повздовжнім прорізом, в якому розташовано два поршні, з'єднані з кареткою, в нижній частині одного корпусу розміщено датчик положення, корпуси з'єднані з...
Модуль лінійного переміщення
Номер патенту: 68238
Опубліковано: 26.03.2012
Автори: Степаненко Олександр Олександрович, Кузнєцов Юрій Миколайович
Мітки: лінійного, модуль, переміщення
Формула / Реферат:
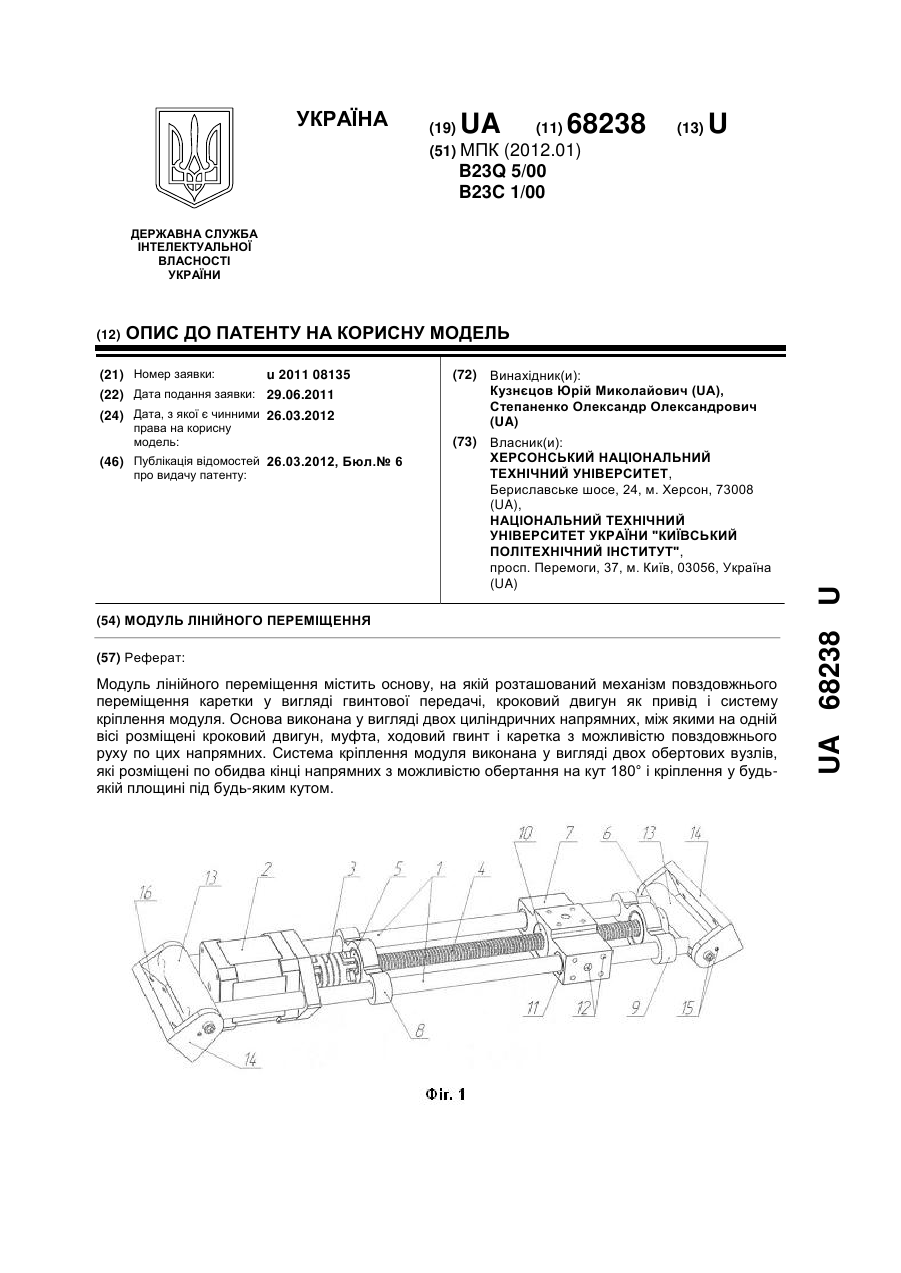
Модуль лінійного переміщення, що містить основу, на якій розташований механізм повздовжнього переміщення каретки у вигляді гвинтової передачі, кроковий двигун як привід і систему кріплення модуля, який відрізняється тим, що основа виконана у вигляді двох циліндричних напрямних, між якими на одній осі розміщені кроковий двигун, муфта, ходовий гвинт і каретка з можливістю повздовжнього руху по цих напрямних, а система кріплення модуля виконана...
Модуль лінійного переміщення
Номер патенту: 73495
Опубліковано: 25.09.2012
Автори: Степаненко Олександр Олександрович, Кузнєцов Юрій Миколайович, Рожко Оксана Ігорівна
Мітки: переміщення, модуль, лінійного
Формула / Реферат:
Модуль лінійного переміщення, що містить несучу систему, виконану у вигляді двох циліндричних напрямних, між якими на одній осі розміщені кроковий двигун, муфта, ходовий гвинт і каретка з можливістю повздовжнього руху по цих напрямних, а система кріплення модуля виконана у вигляді двох обертових вузлів, які розміщені по обидва кінці напрямних з можливістю обертання на кут 180° і кріплення у будь-якій площині під будь-яким кутом, який...
Механізм лінійного переміщення пристрою для обслуговування дверей або рам коксових печей
Номер патенту: 77365
Опубліковано: 15.11.2006
Автори: Бондарєв Олександр Олександрович, Гетьман Володимир Миколайович
МПК: C10B 25/00
Мітки: коксових, рам, переміщення, пристрою, печей, обслуговування, дверей, механізм, лінійного
Формула / Реферат:
1. Механізм лінійного переміщення пристрою для обслуговування дверей або рам коксових печей, що містить вертикальну стійку, важільну систему, яка включає шарнірно закріплені за допомогою підвісок на вертикальній стійці спарені двоплечі важелі, і привід обертово-поступального переміщення, встановлений на вертикальній стійці, який відрізняється тим, що механізм додатково забезпечений кареткою, яка рухомо встановлена на вертикальній стійці і...
Застосування натяжного пристрою для зменшення переміщення рухомого складу

Номер патенту: 95324
Опубліковано: 25.07.2011
Автор: Марченко Юрій Павлович
МПК: B61B 12/00, B61B 7/02
Мітки: складу, переміщення, натяжного, застосування, пристрою, зменшення, рухомого
Формула / Реферат:
Застосування натяжного пристрою каната підвісної канатної залізниці з вантажем, що складається з кількох елементів, один з яких постійно з'єднаний з канатом, а решта елементів розміщені на нерухомих упорах з можливістю поетапної гравітаційної взаємодії зі згаданим елементом вантажу, що постійно з'єднаний з канатом, під час підйому цього елемента вгору, як натяжного пристрою гнучкого тягового органа транспортних систем, в яких тягове зусилля...
Попередній патент: Спосіб магнітно-імпульсного притягання металевих заготівок одновитковим круговим індуктором, розташованим над допоміжним екраном
Наступний патент: Відцентрова бурякорізка
Випадковий патент: Пристрій для визначення кутів нахилу датчика ультразвукового апарата до сагітальної та фронтальної площин