Рушій мобільного малогабаритного робота
Номер патенту: 96355
Опубліковано: 10.02.2015
Автори: Кобиляков Володимир Володимирович, Полівцев Сергій Олександрович, Цибульнік Олена Степанівна
Формула / Реферат
1. Рушій мобільного малогабаритного робота, що містить корпус, симетричний горизонтальній площині, принаймні шість керованих ніг, що обертаються, розташованих по протилежних сторонах корпусу і забезпечених принаймні шістьма приводами, що індивідуально приводять кожну із вказаних ніг у рух, регулятор, що вибірково приводить у дію відповідну ногу, причому приводи містять двигун, з'єднаний із вказаним регулятором, і зубчату передачу, контролер, з'єднаний зі згаданими приводами, блок живлення, який відрізняється тим, що кожна з керованих ніг виконана з двох частин - основи і рухомо з'єднаної з нею стопи.
2. Рушій за п. 1, який відрізняється тим, що кожна нога виконана з можливістю обертання всієї ноги зі стопою в радіальному напрямі відносно поперечної осі корпусу рушія і відхилення ноги в напрямі, паралельному поперечній осі корпусу рушія, причому стопа виконана з можливістю плоскопаралельного переміщення відносно основи ноги.
3. Рушій за п. 1, який відрізняється тим, що в нього введений для кожної ноги додатковий двигун з редуктором, ексцентриком і штовхачем.
Текст
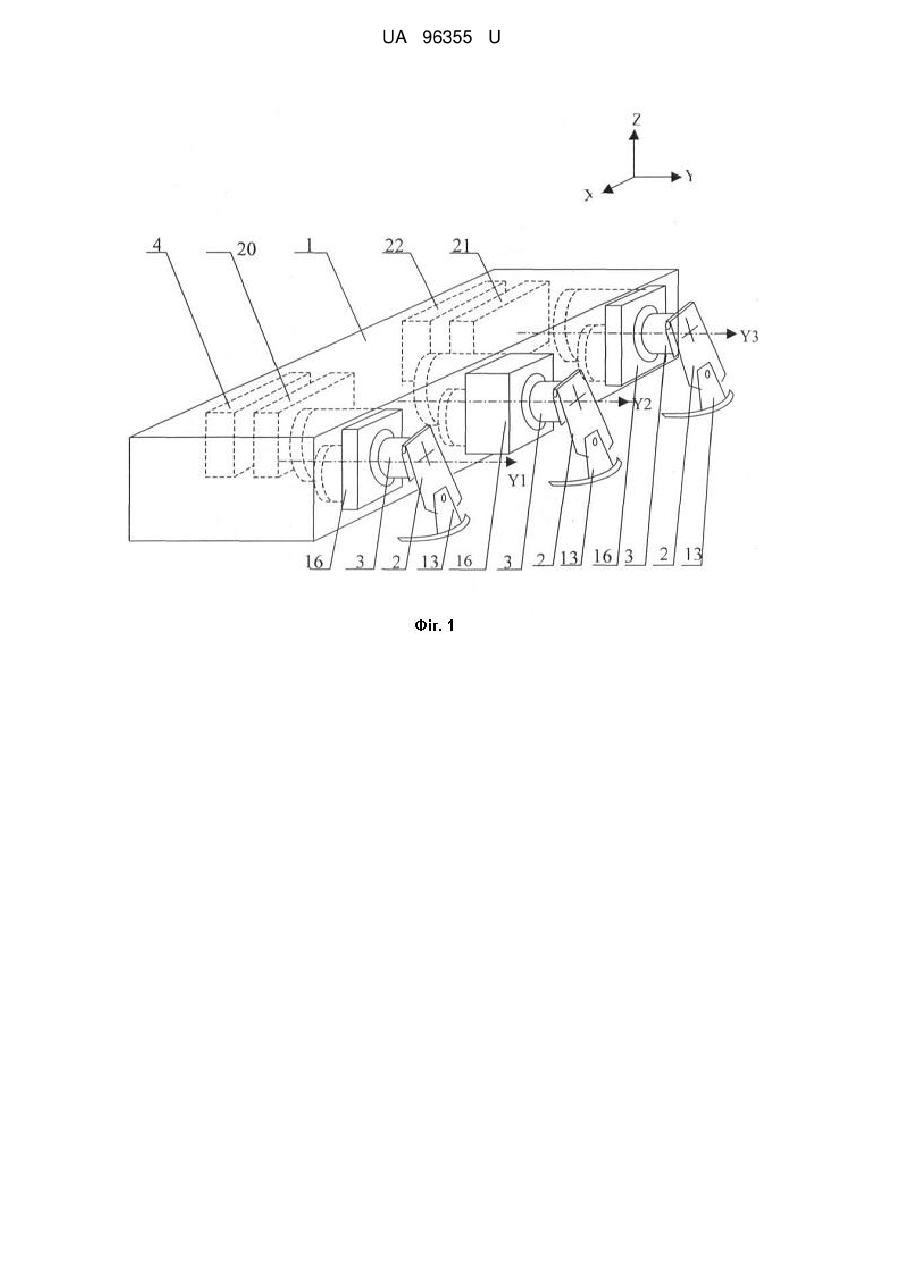
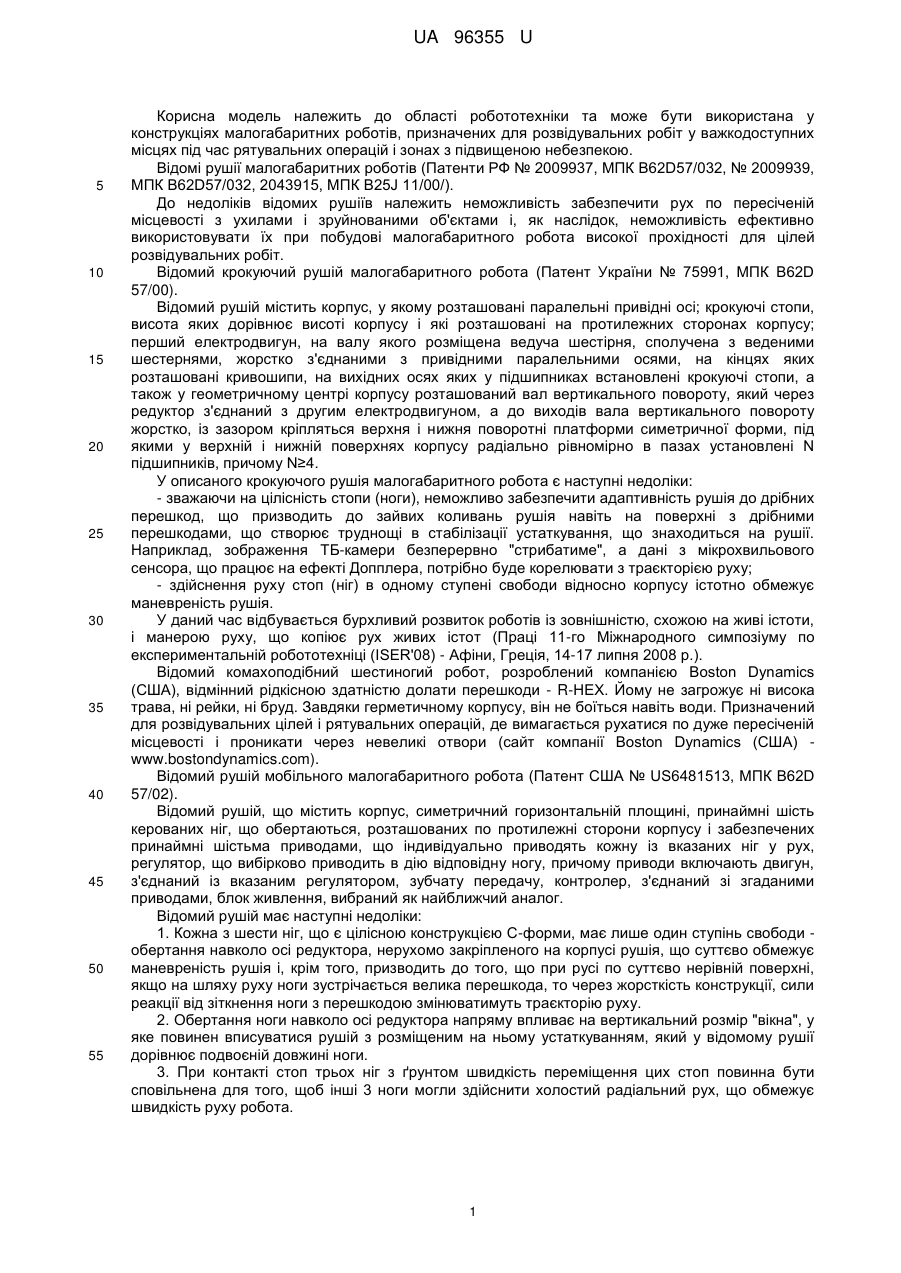
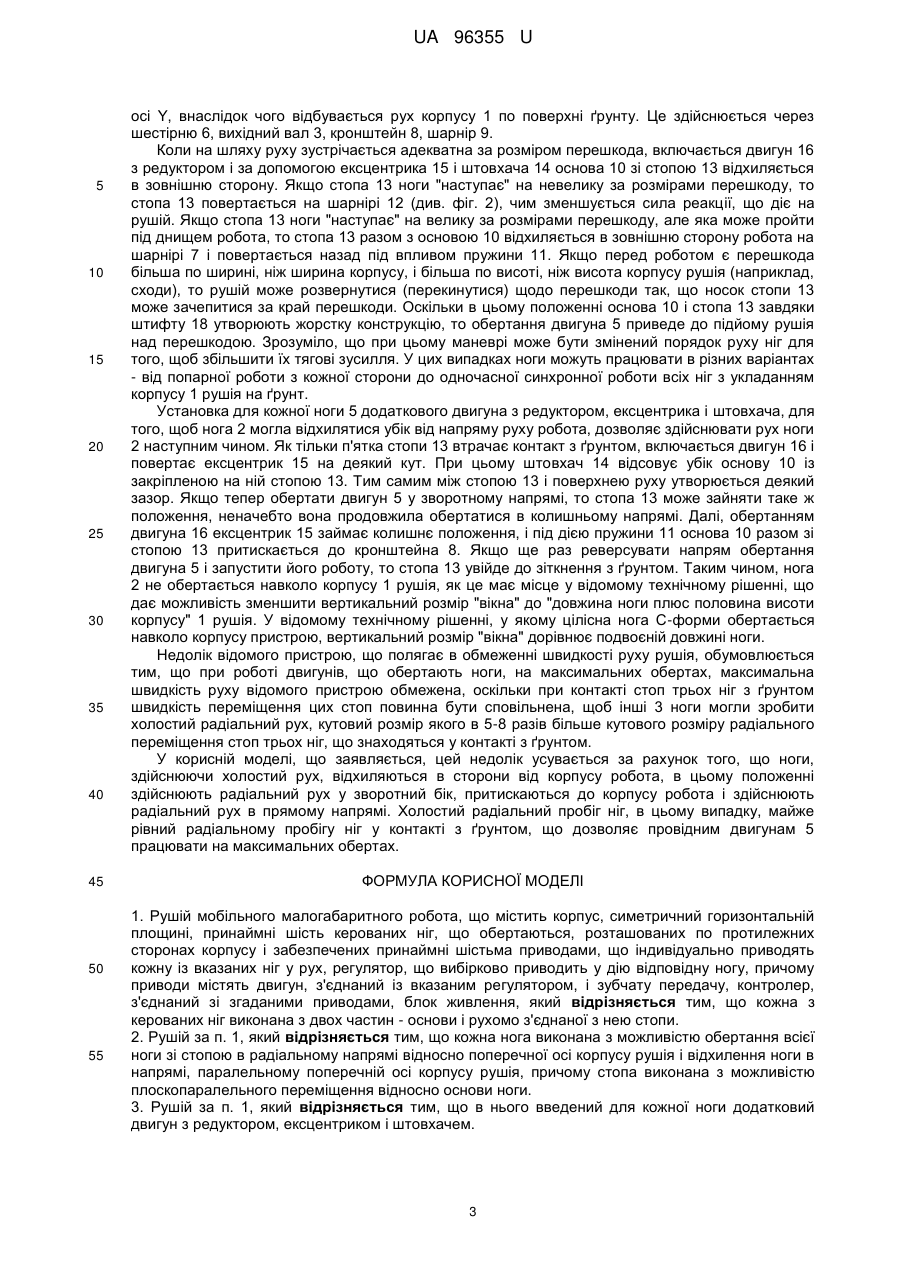
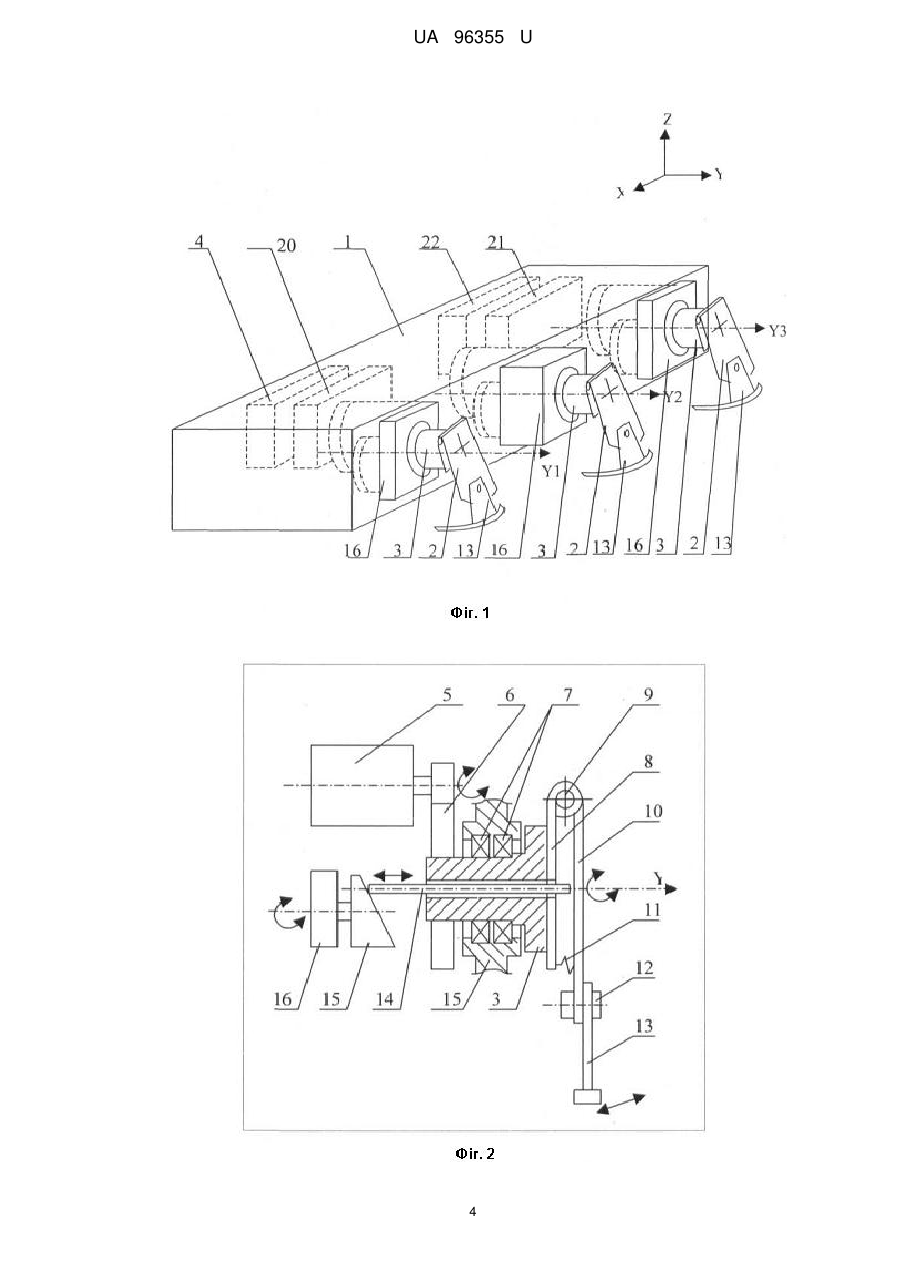
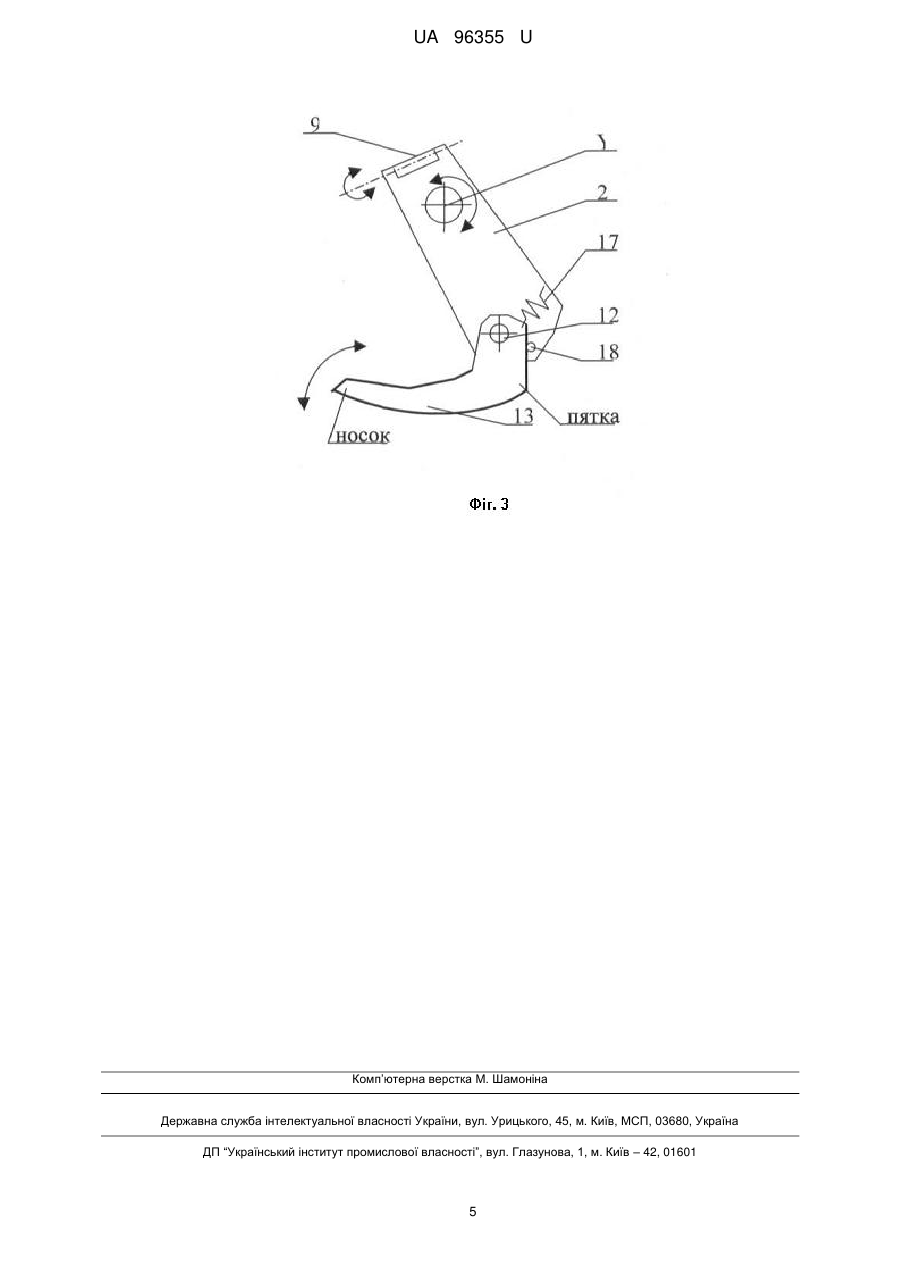
Реферат: Рушій мобільного малогабаритного робота містить корпус, симетричний горизонтальній площині, принаймні шість керованих ніг, що обертаються, розташованих по протилежних сторонах корпусу і забезпечених принаймні шістьма приводами, що індивідуально приводять кожну із вказаних ніг у рух, регулятор, що вибірково приводить у дію відповідну ногу, причому приводи містять двигун, з'єднаний із вказаним регулятором, і зубчату передачу, контролер, з'єднаний зі згаданими приводами, блок живлення. Кожна з керованих ніг виконана з двох частин - основи і рухомо з'єднаної з нею стопи. UA 96355 U (54) РУШІЙ МОБІЛЬНОГО МАЛОГАБАРИТНОГО РОБОТА UA 96355 U UA 96355 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до області робототехніки та може бути використана у конструкціях малогабаритних роботів, призначених для розвідувальних робіт у важкодоступних місцях під час рятувальних операцій і зонах з підвищеною небезпекою. Відомі рушії малогабаритних роботів (Патенти РФ № 2009937, МПК B62D57/032, № 2009939, МПК B62D57/032, 2043915, МПК B25J 11/00/). До недоліків відомих рушіїв належить неможливість забезпечити рух по пересіченій місцевості з ухилами і зруйнованими об'єктами і, як наслідок, неможливість ефективно використовувати їх при побудові малогабаритного робота високої прохідності для цілей розвідувальних робіт. Відомий крокуючий рушій малогабаритного робота (Патент України № 75991, МПК B62D 57/00). Відомий рушій містить корпус, у якому розташовані паралельні привідні осі; крокуючі стопи, висота яких дорівнює висоті корпусу і які розташовані на протилежних сторонах корпусу; перший електродвигун, на валу якого розміщена ведуча шестірня, сполучена з веденими шестернями, жорстко з'єднаними з привідними паралельними осями, на кінцях яких розташовані кривошипи, на вихідних осях яких у підшипниках встановлені крокуючі стопи, а також у геометричному центрі корпусу розташований вал вертикального повороту, який через редуктор з'єднаний з другим електродвигуном, а до виходів вала вертикального повороту жорстко, із зазором кріпляться верхня і нижня поворотні платформи симетричної форми, під якими у верхній і нижній поверхнях корпусу радіально рівномірно в пазах установлені N підшипників, причому N≥4. У описаного крокуючого рушія малогабаритного робота є наступні недоліки: - зважаючи на цілісність стопи (ноги), неможливо забезпечити адаптивність рушія до дрібних перешкод, що призводить до зайвих коливань рушія навіть на поверхні з дрібними перешкодами, що створює труднощі в стабілізації устаткування, що знаходиться на рушії. Наприклад, зображення ТБ-камери безперервно "стрибатиме", а дані з мікрохвильового сенсора, що працює на ефекті Допплера, потрібно буде корелювати з траєкторією руху; - здійснення руху стоп (ніг) в одному ступені свободи відносно корпусу істотно обмежує маневреність рушія. У даний час відбувається бурхливий розвиток роботів із зовнішністю, схожою на живі істоти, і манерою руху, що копіює рух живих істот (Праці 11-го Міжнародного симпозіуму по експериментальній робототехніці (ISER'08) - Афіни, Греція, 14-17 липня 2008 p.). Відомий комахоподібний шестиногий робот, розроблений компанією Boston Dynamics (США), відмінний рідкісною здатністю долати перешкоди - R-HEX. Йому не загрожує ні висока трава, ні рейки, ні бруд. Завдяки герметичному корпусу, він не боїться навіть води. Призначений для розвідувальних цілей і рятувальних операцій, де вимагається рухатися по дуже пересіченій місцевості і проникати через невеликі отвори (сайт компанії Boston Dynamics (США) www.bostondynamics.com). Відомий рушій мобільного малогабаритного робота (Патент США № US6481513, МПК B62D 57/02). Відомий рушій, що містить корпус, симетричний горизонтальній площині, принаймні шість керованих ніг, що обертаються, розташованих по протилежні сторони корпусу і забезпечених принаймні шістьма приводами, що індивідуально приводять кожну із вказаних ніг у рух, регулятор, що вибірково приводить в дію відповідну ногу, причому приводи включають двигун, з'єднаний із вказаним регулятором, зубчату передачу, контролер, з'єднаний зі згаданими приводами, блок живлення, вибраний як найближчий аналог. Відомий рушій має наступні недоліки: 1. Кожна з шести ніг, що є цілісною конструкцією С-форми, має лише один ступінь свободи обертання навколо осі редуктора, нерухомо закріпленого на корпусі рушія, що суттєво обмежує маневреність рушія і, крім того, призводить до того, що при русі по суттєво нерівній поверхні, якщо на шляху руху ноги зустрічається велика перешкода, то через жорсткість конструкції, сили реакції від зіткнення ноги з перешкодою змінюватимуть траєкторію руху. 2. Обертання ноги навколо осі редуктора напряму впливає на вертикальний розмір "вікна", у яке повинен вписуватися рушій з розміщеним на ньому устаткуванням, який у відомому рушії дорівнює подвоєній довжині ноги. 3. При контакті стоп трьох ніг з ґрунтом швидкість переміщення цих стоп повинна бути сповільнена для того, щоб інші 3 ноги могли здійснити холостий радіальний рух, що обмежує швидкість руху робота. 1 UA 96355 U 5 10 15 20 25 30 35 40 45 50 55 В основу корисної моделі поставлена задача створення рушія мобільного малогабаритного робота, що має високу прохідність, маневреність і що забезпечує стабільність траєкторії руху за певним маршрутом. Поставлена задача вирішується за рахунок того, що у рушії мобільного малогабаритного робота, що містить корпус, симетричний горизонтальній площині, принаймні шість керованих ніг, що обертаються, розташованих по протилежні сторони корпусу і забезпечених принаймні шістьма приводами, що індивідуально приводять кожну з вказаних ніг у рух, регулятор, що вибірково приводить у дію відповідну ногу, причому приводи включають: двигун, з'єднаний із вказаним регулятором, і зубчату передачу, контролер, з'єднаний зі згаданими приводами, блок живлення, кожна з керованих ніг виконана з двох частин - основи і рухомо з'єднаної з нею стопи, причому кожна нога виконана з можливістю обертання всієї ноги зі стопою в радіальному напрямі відносно поперечної осі корпусу рушія і відхилення ноги в напрямі, паралельному поперечній осі корпусу рушія, а стопа виконана з можливістю плоскопаралельного переміщення відносно основи ноги. Крім того, для кожної ноги введений додатковий двигун з редуктором, ексцентриком і штовхачем. Сукупність відмітних ознак рушія, що заявляється, мобільного малогабаритного робота, у порівнянні з відомими аналогічного призначення, дозволяє рушію, що заявляється, проявляти наступні властивості: - не змінюється траєкторія руху по певному маршруту; - зменшується вертикальний розмір "вікна", у яке повинен вписуватися рушій зі встановленим на ньому устаткуванням; - підвищується швидкість руху робота з пропонованим рушієм. Вищеперелічені властивості сприяють високій прохідності, маневреності і стабільності траєкторії руху по певному маршруту. Таким чином сукупність відмітних ознак сприяє досягненню вказаного технічного результату. На кресленні (фіг. 1) наведена конструкція рушія, що заявляється, мобільного малогабаритного робота, загальний вигляд. На фіг. 2 наведена конструкція ноги рушія. На фіг. 3 показаний вигляд на ногу збоку. Рушій, що заявляється, мобільного малогабаритного робота містить корпус 1, симетричний горизонтальній площині, принаймні шість керованих ніг, що обертаються, 2, розташованих по протилежних сторонах корпусу 1 на валах 3 і забезпечених приводами (умовно не показані), що індивідуально приводять кожну із вказаних ніг у рух, регулятор 4, що вибірково приводить у дію відповідну ногу. Кожна нога 2 забезпечена двигуном 5, що приводить в обертання вихідну шестірню 6, закріплену нерухомо на порожнистому валу 3, який обертається в підшипниках 7, закріплених у корпусі рушія 1. До зовнішньої сторони вала 3 прикріплений кронштейн 8 з шарнірним вузлом 9. До шарнірного вузла 9 прикріплено основу ноги 10, яка підтягується до кронштейна 8 пружиною 11. До основи 10 через шарнірний вузол 12 прикріплена стопа 13. У кронштейні 8 є отвір, через який проходить штовхач 14, який контактує з ексцентриком 15, закріпленим на виході додатково введеного двигуна з редуктором 16. Стопа 13 може переміщатися паралельно основі 10 навколо шарніра 12, а пружина 17 підтягує стопу 13 до упору 18. Підошва стопи 13, що безпосередньо контактує з ґрунтом, має форму частини кола з центром на осі Y. Крім того, корпус 1 рушія містить регулятор 4 управління двигунами 5, блок живлення 20, бортовий комп'ютер 21 і систему управління 22. Пристрій, що заявляється, працює таким чином. Пересуванням пристрою, що заявляється, управляє система управління 22. Управління ногами здійснюється так, щоб на протилежних сторонах корпусу 1 були розташовані три ноги 2, формуючи таким чином ліву і праву модель триноги. Природно тринога лівої сторони включає передню ногу 2 лівої сторони, задню ногу 2 лівої сторони і праву середню ногу 2. Так само права тринога включає праву передню ногу 2, праву задню ногу 2 і ногу 2 середини лівої сторони. Під час пересування тринога лівої сторони синхронізована і на 180° не збігається по фазі з правою триногою, тому виконується поперемінна хода триніг. Томуу будь-який момент рушій спирається на три ноги 2, стопа 13 кожної з яких - частина кола з центром по осі ніг Y1, Y2, Y3. Можна говорити, що робот рухається на трьох колесах постійного діаметра і, отже, коливання його корпусу будуть обумовлюватися лише нерівністю ґрунту. За рахунок форми стопи і її шарнірно-пружинного з'єднання з основою 10 ці коливання можуть бути компенсовані коливанням стопи 13 щодо основи 10 і пружиною 17, що підтягує. Після включення двигуна 5, що забезпечує обертання ніг 2 із зовнішньої, бокової, сторони корпусу 1 рушія, починається радіальне переміщення ніг 2 разом з основою 10 і стопою 13 щодо 2 UA 96355 U 5 10 15 20 25 30 35 40 45 50 55 осі Y, внаслідок чого відбувається рух корпусу 1 по поверхні ґрунту. Це здійснюється через шестірню 6, вихідний вал 3, кронштейн 8, шарнір 9. Коли на шляху руху зустрічається адекватна за розміром перешкода, включається двигун 16 з редуктором і за допомогою ексцентрика 15 і штовхача 14 основа 10 зі стопою 13 відхиляється в зовнішню сторону. Якщо стопа 13 ноги "наступає" на невелику за розмірами перешкоду, то стопа 13 повертається на шарнірі 12 (див. фіг. 2), чим зменшується сила реакції, що діє на рушій. Якщо стопа 13 ноги "наступає" на велику за розмірами перешкоду, але яка може пройти під днищем робота, то стопа 13 разом з основою 10 відхиляється в зовнішню сторону робота на шарнірі 7 і повертається назад під впливом пружини 11. Якщо перед роботом є перешкода більша по ширині, ніж ширина корпусу, і більша по висоті, ніж висота корпусу рушія (наприклад, сходи), то рушій може розвернутися (перекинутися) щодо перешкоди так, що носок стопи 13 може зачепитися за край перешкоди. Оскільки в цьому положенні основа 10 і стопа 13 завдяки штифту 18 утворюють жорстку конструкцію, то обертання двигуна 5 приведе до підйому рушія над перешкодою. Зрозуміло, що при цьому маневрі може бути змінений порядок руху ніг для того, щоб збільшити їх тягові зусилля. У цих випадках ноги можуть працювати в різних варіантах - від попарної роботи з кожної сторони до одночасної синхронної роботи всіх ніг з укладанням корпусу 1 рушія на ґрунт. Установка для кожної ноги 5 додаткового двигуна з редуктором, ексцентрика і штовхача, для того, щоб нога 2 могла відхилятися убік від напряму руху робота, дозволяє здійснювати рух ноги 2 наступним чином. Як тільки п'ятка стопи 13 втрачає контакт з ґрунтом, включається двигун 16 і повертає ексцентрик 15 на деякий кут. При цьому штовхач 14 відсовує убік основу 10 із закріпленою на ній стопою 13. Тим самим між стопою 13 і поверхнею руху утворюється деякий зазор. Якщо тепер обертати двигун 5 у зворотному напрямі, то стопа 13 може зайняти таке ж положення, неначебто вона продовжила обертатися в колишньому напрямі. Далі, обертанням двигуна 16 ексцентрик 15 займає колишнє положення, і під дією пружини 11 основа 10 разом зі стопою 13 притискається до кронштейна 8. Якщо ще раз реверсувати напрям обертання двигуна 5 і запустити його роботу, то стопа 13 увійде до зіткнення з ґрунтом. Таким чином, нога 2 не обертається навколо корпусу 1 рушія, як це має місце у відомому технічному рішенні, що дає можливість зменшити вертикальний розмір "вікна" до "довжина ноги плюс половина висоти корпусу" 1 рушія. У відомому технічному рішенні, у якому цілісна нога С-форми обертається навколо корпусу пристрою, вертикальний розмір "вікна" дорівнює подвоєній довжині ноги. Недолік відомого пристрою, що полягає в обмеженні швидкості руху рушія, обумовлюється тим, що при роботі двигунів, що обертають ноги, на максимальних обертах, максимальна швидкість руху відомого пристрою обмежена, оскільки при контакті стоп трьох ніг з ґрунтом швидкість переміщення цих стоп повинна бути сповільнена, щоб інші 3 ноги могли зробити холостий радіальний рух, кутовий розмір якого в 5-8 разів більше кутового розміру радіального переміщення стоп трьох ніг, що знаходяться у контакті з ґрунтом. У корисній моделі, що заявляється, цей недолік усувається за рахунок того, що ноги, здійснюючи холостий рух, відхиляються в сторони від корпусу робота, в цьому положенні здійснюють радіальний рух у зворотний бік, притискаються до корпусу робота і здійснюють радіальний рух в прямому напрямі. Холостий радіальний пробіг ніг, в цьому випадку, майже рівний радіальному пробігу ніг у контакті з ґрунтом, що дозволяє провідним двигунам 5 працювати на максимальних обертах. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 1. Рушій мобільного малогабаритного робота, що містить корпус, симетричний горизонтальній площині, принаймні шість керованих ніг, що обертаються, розташованих по протилежних сторонах корпусу і забезпечених принаймні шістьма приводами, що індивідуально приводять кожну із вказаних ніг у рух, регулятор, що вибірково приводить у дію відповідну ногу, причому приводи містять двигун, з'єднаний із вказаним регулятором, і зубчату передачу, контролер, з'єднаний зі згаданими приводами, блок живлення, який відрізняється тим, що кожна з керованих ніг виконана з двох частин - основи і рухомо з'єднаної з нею стопи. 2. Рушій за п. 1, який відрізняється тим, що кожна нога виконана з можливістю обертання всієї ноги зі стопою в радіальному напрямі відносно поперечної осі корпусу рушія і відхилення ноги в напрямі, паралельному поперечній осі корпусу рушія, причому стопа виконана з можливістю плоскопаралельного переміщення відносно основи ноги. 3. Рушій за п. 1, який відрізняється тим, що в нього введений для кожної ноги додатковий двигун з редуктором, ексцентриком і штовхачем. 3 UA 96355 U 4 UA 96355 U Комп’ютерна верстка М. Шамоніна Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюPolivtsev Serhii Oleksandrovych, Tsybulnik Olena Stepanivna
Автори російськоюПоливцев Сергей Александрович, Цыбульник Елена Степановна
МПК / Мітки
МПК: B62D 57/00, B25J 11/00
Мітки: робота, рушій, мобільного, малогабаритного
Код посилання
<a href="https://ua.patents.su/7-96355-rushijj-mobilnogo-malogabaritnogo-robota.html" target="_blank" rel="follow" title="База патентів України">Рушій мобільного малогабаритного робота</a>
Крокуючий рушій малогабаритного робота

Номер патенту: 75991
Опубліковано: 15.06.2006
Автори: Шевченко Анатолій Іванович, Полівцев Сергій Олександрович
МПК: B62D 57/00, B25J 11/00
Мітки: крокуючий, робота, малогабаритного, рушій
Формула / Реферат:
1. Крокуючий рушій малогабаритного робота, що містить корпус, у якому розташовані рівнобіжні привідні осі, крокуючі стопи, що розташовані на протилежних боках корпуса, який відрізняється тим, що у нього введені перший електродвигун, на валу якого розташований перший редуктор, на виході якого установлена ведуча шестірня, сполучена з веденими шестернями, жорстко з'єднаними з привідними рівнобіжними осями, на кінцях яких розташовані кривошипи,...
Колесо-рушій мобільного робота

Номер патенту: 45369
Опубліковано: 10.11.2009
Автори: Кондратенко Юрій Пантелійович, Запорожець Юрій Михайлович
МПК: B63B 59/00, B60B 19/00, B60F 3/00
Мітки: колесо-рушій, мобільного, робота
Формула / Реферат:
Колесо-рушій мобільного робота, що містить маточину з геометричною віссю колеса, обід зі стрижнями з їх геометричними осями, розміщеними на сторонах правильного багатокутника, точка взаємного перетину бісектрис внутрішніх кутів якого розміщена на геометричній осі колеса, вузол для з'єднання маточини з ободом у місцях, розміщених у вершинах цього багатокутника, і шину, розділену між цими місцями по окружності колеса на секції, а багатокутник...
Спосіб магнітокерованого переміщення мобільного робота
Номер патенту: 47369
Опубліковано: 25.01.2010
Автори: Кондратенко Володимир Юрійович, Кондратенко Юрій Пантелійович, Запорожець Юрій Михайлович
МПК: B25J 9/10
Мітки: робота, магнітокерованого, мобільного, спосіб, переміщення
Формула / Реферат:
Спосіб магнітокерованого переміщення мобільного робота, згідно з яким мобільний робот оснащують ведучими колесами та притискними магнітами, розміщують його у робочій зоні, за допомогою притискних магнітів утримують його корпус на оброблюваній феромагнітній поверхні, приводять до руху ведучі колеса і здійснюють покрокове переміщення мобільного робота по оброблюваній феромагнітній поверхні, для чого почергово крок за кроком вводять у зчеплення...
Водометний рушій

Номер патенту: 87359
Опубліковано: 10.02.2014
Автори: Кравцов Андрій Олександрович, Оришака Олег Володимирович, Артюхов Анатолій Миколайович, Оришака Володимир Олексійович
МПК: B63H 1/00, F16K 47/00
Мітки: водометний, рушій
Формула / Реферат:
1. Водометний рушій, який містить водометну трубу, в якій розташований гвинт з приводом, до якої жорстко приєднаний прискорювач руху рідини, який відрізняється тим, що на вході в прискорювач руху рідини встановлений блок, який має конусну поверхню зі сторони корпуса прискорювача, що створює камеру, в якій змонтовані ізольовано від корпусу і блока електроди, що з'єднані з генератором електричних імпульсів.2. Водометний рушій за п. 1,...
Електромагнітний рушій
Номер патенту: 6818
Опубліковано: 16.05.2005
Автори: Старик Іван Карпович, Родин Сергій Геннадійович, Жиленко Валерій Дмитрович, Сакун Микола Юхимович
МПК: H02K 33/00
Мітки: електромагнітний, рушій
Формула / Реферат:
1. Електромагнітний рушій, що включає корпус, в якому розташовані електромагніт з обмоткою і рухомим якорем та пружину оберненої дії, що встановлена з можливістю взаємодії з якорем та корпусом, а обмотка електромагніта має клеми для її підключення через вимикач до блоку живлення, який відрізняється тим, що електромагнітний рушій виконаний у вигляді ланцюга, який включає щонайменше два електромагніти, а корпус кожного попереднього...