Спосіб для випробувань безколісних авторегуляторів односторонньої дії гальмівної важільної передачі залізничних вагонів
Номер патенту: 99104
Опубліковано: 25.05.2015
Автори: Дмитрієв Дмитро Вікторович, Кельріх Михайло Борисович, Валігура Микола Якимович

Формула / Реферат
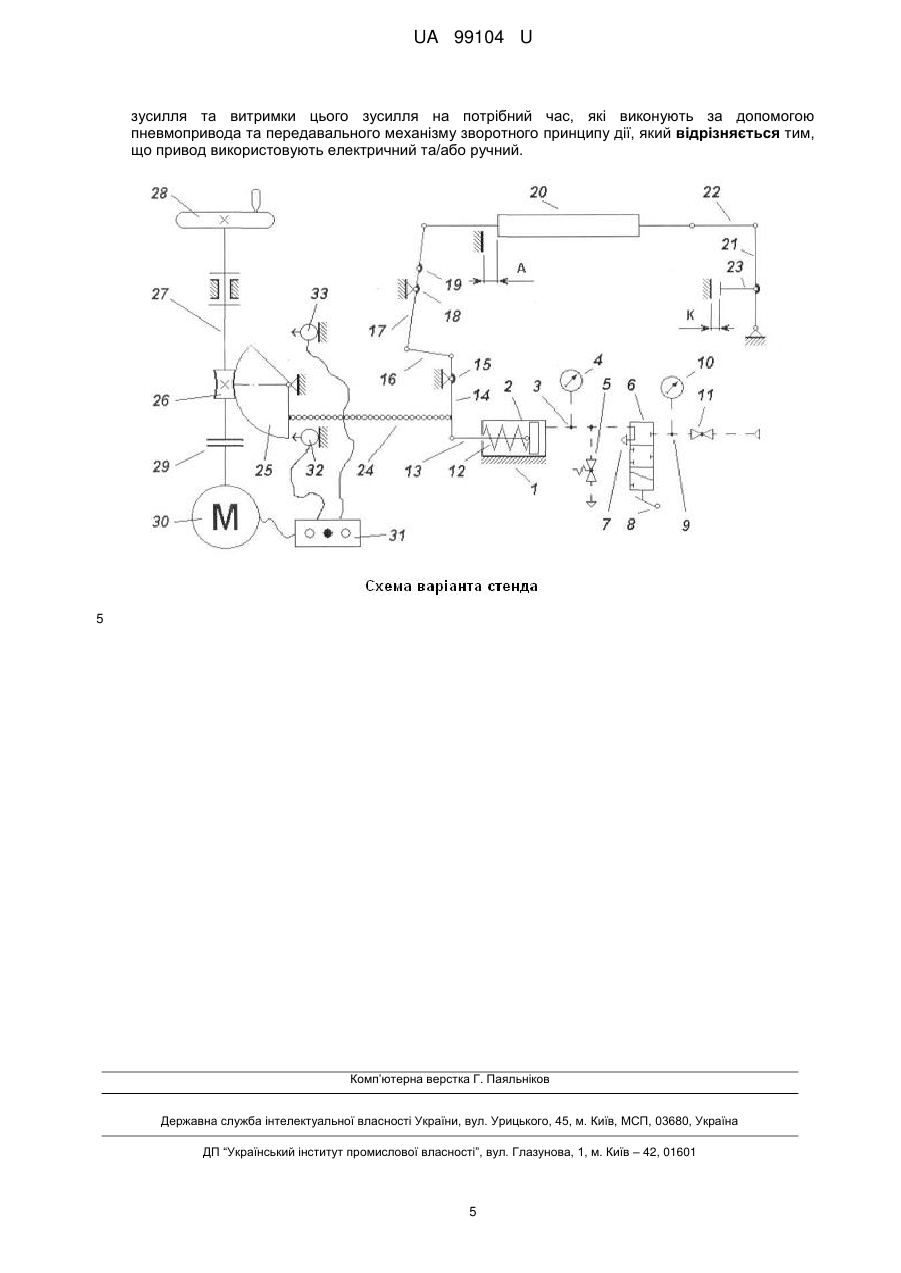
Спосіб випробувань безколісних авторегуляторів односторонньої дії гальмівної важільної передачі залізничних вагонів, що включає операції розтягування авторегулятора до потрібного зусилля та витримки цього зусилля на потрібний час, які виконують за допомогою пневмопривода та передавального механізму зворотного принципу дії, який відрізняється тим, що привод використовують електричний та/або ручний.
Текст
Реферат: Спосіб випробувань безколісних авторегуляторів односторонньої дії гальмівної важільної передачі залізничних вагонів включає операції розтягування авторегулятора до потрібного зусилля та витримки цього зусилля на потрібний час, які виконують за допомогою пневмопривода та передавального механізму зворотного принципу дії. Привод використовують електричний та/або ручний. UA 99104 U (54) СПОСІБ ДЛЯ ВИПРОБУВАНЬ БЕЗКОЛІСНИХ АВТОРЕГУЛЯТОРІВ ОДНОСТОРОННЬОЇ ДІЇ ГАЛЬМІВНОЇ ВАЖІЛЬНОЇ ПЕРЕДАЧІ ЗАЛІЗНИЧНИХ ВАГОНІВ UA 99104 U UA 99104 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі залізничного транспорту, а саме до робіт щодо перевірки працездатності авторегуляторів гальмових важільних передач вагонів. Корисну модель призначено для вирішення існуючої проблеми ресурсозбереження при випробуванні авторегуляторів та автономізації роботи пристрою для випробувань з розширенням сфери його застосування в наукових дослідженнях і для навчання. Відомий типовий стенд для випробування авторегулятора гальмової важільної передачі [див. рис. 266 с. 313 підручника "Крылов В.И, Крылов В.В. Автоматические тормоза подвижного состава. - Μ.: Транспорт, 1983. - 360 с."]. На каркасі цього стенда закріплено: обладнаний манометром силовий пневмоциліндр, до якого через триходовий кран підведене джерело стисненого повітря; механізм передачі розтягувального зусилля від пневмоциліндра привода до випробовуваного авторегулятора; вузол встановлення зазора між корпусом авторегулятора та упором на каркасі стенда для імітації дії авторегулятора на вагоні; вузол імітації натиснення гальмової колодки на колесо вагона, який дозволяє на стенді встановлювати відстань між імітаційними поверхнями тертя гальмової колодки та вагонного колеса; демпферний пристрій для компенсації пружних деформацій важелів стенда. Працездатність типового стенда є повністю залежною від наявності джерела стисненого повітря; він потребує значного витрачання стисненого повітря на проведення випробувань авторегуляторів і має обмежені функціональні можливості у зв'язку зі спеціалізацією на випробуванні в умовах промислового виробництва авторегуляторів одного типорозміру (№ 574Б, РКЗТ-675, РТРП-675, РТРП-675М). Передавальний механізм типового стенда передає з програшем зусилля від пневмопривода до випробовуваного авторегулятора. Типовий стенд здійснює спосіб випробувань з виконанням лише двох перевірок авторегулятора: 1) на стабільність роботи і 2) на стягування гальмової важільної передачі. Найбільш близьким до заявленого пристрою за технічною суттю є стенд для випробувань авторегуляторів гальмових важільних передач залізничних вагонів [патент № 65385, Україна, МПК В61Н 15/00]. На каркасі цього стенда закріплено: силовий пневмоциліндр, до якого за допомогою повітропровода з приладами контроля тиску та запобіжним клапаном через триходовий кран підведене джерело стисненого повітря; важільну передачу для передавання з виграшем розтягувального зусилля від пневмоциліндра до випробовуваного авторегулятора; пристрій для встановлення відстані між корпусом авторегулятора та відповідним упором каркаса стенда; вузол імітації натиснення гальмової колодки на колесо вагона; демпферний пристрій. До комплекту стенда-прототипу входять знімні адаптери, які забезпечують можливість закріплення на стенді випробовуваних авторегуляторів різних довжин. Стенд-аналог призначено для випробовування авторегулятора на: 1) стабільність роботи; 2) стягування гальмової важільної передачі; 3) механічну міцність. Стенд і спосіб, які є найближчими аналогами, зменшують (порівняно з типовим стендом) витрату енергії на випробування кожного авторегулятора, але в цілому залишаються залежними від наявності джерела стисненого повітря. В основу корисної моделі поставлена задача можливості випробувань авторегуляторів без застосування пневмопривода, як одного з найбільш енергоємних джерел енергії, аж до повної автономізації від зовнішнього джерела промислової енергії при збереженні (в основному) традиційної технології виконання випробувань. Поставлена задача вирішується тим, що спосіб і пристрій для випробувань безколісних авторегуляторів односторонньої дії гальмової важільної передачі залізничних вагонів дозволяють перевіряти працездатність авторегуляторів від електропривода або від ручного привода з можливістю (за потреби) роботи і від пневмопривода. Суть корисної моделі, яка заявляється, полягає в тому, що пристрій складається з: повітропроводудля підведення стисненого повітря; пульта керування, обладнаного органами керування (як варіант - у автоматичному режимі) та пристроями (датчиками) контролю як режимів проведення випробувань, так і параметрів дії випробовуваного авторегулятора (як варіант - з документуванням результатів), а також приладами автоматики, які забезпечують безпечні режими функціонування; привода, який створює силову дію; передавального кінематичного ланцюга з передачею незворотного принципу дії, що прикладає розтягувальне зусилля до випробовуваного авторегулятора або від електродвигуна, або від пневмоциліндра, або від механізму ручної дії; вузла кріплення на передньому важелі, що слугує для шарнірного під'єднання вушка випробовуваного авторегулятора; пристрою регулювання зазору "А" (між корпусом авторегулятора та відповідним упором каркаса стенда); комплекту знімних адаптерів, які забезпечують можливість закріплення на стенді випробовуваних авторегуляторів різних довжин; вузла кріплення на задньому важелі, що слугує для шарнірного під'єднання штанги гвинта випробовуваного авторегулятора, демпферного пристрою, який призначено для 1 UA 99104 U 5 10 15 20 25 30 35 40 45 50 55 60 компенсації пружних деформацій деталей стенда та випробовуваного авторегулятора; вузла упору, який слугує для імітації притиснення гальмової колодки до колеса залізничного вагона; пристрою регулювання зазору "К" (між імітаторами гальмової колодки та колеса вагона на стенді); датчика розтягувального зусилля (наприклад динамометричної пружини зі шкалою для варіанта автономного пристрою та/або тензометричної месс - дози - у разі автоматизованого документування результатів випробувань). Місце розташування датчика розтягувального зусилля та його конструкція залежить від конкретного варіанта втілення корисної моделі тому він в подальшому більше не згадується. Пристрої регулювання зазорів "А" та "К" повинні дозволяти незалежно один від одного встановлювати необхідну величину названих зазорів, наприклад, за допомогою передач "гвинт-гайка". У корисній моделі для привода може бути застосована будь-яка комбінація таких джерел енергії: електрична, пневматична, ручна, що залежить від певного втілення корисної моделі. Пропонується три варіанта втілення корисної моделі, які за основним призначенням та комплектацією можна умовно назвати: "промисловий", "науковий" і "навчальний". Для промислового застосування рекомендовано подвійний (електричний та ручний) привод; для наукових досліджень - потрійний привод (тобто повний перелік складових); для навчальних закладів - тільки ручний привод. При цьому електро- чи пневмопривод забезпечують продуктивність праці при випробуванні авторегуляторів, яка потрібна для промисловості, а ручний привод дає автономізацію проведення випробувань і найвище енергозбереження промислових джерел енергії. Конструкція ручного привода може бути різна, наприклад подібна до привода стоянкового гальма вагонів пасажирського типу (з передачею "гвинт-гайка") чи подібна до привода стоянкового гальма вагонів вантажного типу (із черв'ячною зубчастою передачею). При цьому важливо, щоб застосовувана передача мала незворотний принцип дії, тобто з передаванням потужності тільки в напрямку від ведучої ланки до веденої ланки, наприклад, була само гальмуюча. Незворотність дії згаданої передачі потрібна для того, щоб витримувати певний досягнутий рівень розтягувального зусилля на випробовуваному авторегуляторі в будь-який момент на будь-який час і без будь-яких дій. З метою запобігання руйнуванню передачі незворотної дії при роботі стенда від пневмопривода у запропонованому пристрої ведену ланку цієї передачі з'єднано з рештою кінематичного ланцюга напівжорсткою ланкою. Ця ланка є жорсткою при її розтягуванні та гнучкою при її стисканні. Таким вимогам відповідають, наприклад, ланцюг чи канат або трос по типу стропи у вантажопідйомній техніці (рекомендований варіант), або ж куліса з прорізом такої довжини, щоб виключити передавання зусилля від пневмоциліндра на передачу незворотної дії. Залежно від передаточного числа механізму ручного привода і вибраних довжин плечей важелів прийнятих для певного варіанта втілення запропонованого пристрою напівжорстка ланка може під'єднувати механізм ручного привода як до проміжного важеля (при вдосконаленні стенда-прототипа), так і до переднього важеля (при вдосконаленні типового стенда). Так само і потужність електродвигуна електропривода визначається можливістю розвинути на випробовуваному авторегуляторі нормативне розтягувальне зусилля. Як варіант як електродвигун може бути використано мотор-редуктор за потреби отримання значного крутячого моменту на вихідному валу. На кресленні показана принципова схема "наукового" варіанта конструкції (тобто з усіма запропонованими різновидами приводів) пристрою для випробувань безколісних авторегуляторів односторонньої дії гальмової важільної передачі залізничних вагонів. Тут пневматичні лінії зв'язку зображено штриховими, а електричні - хвилястими лініями. На кресленні умовно не показані засоби пристрою для контроля рівня розтягувального зусилля, що прикладене до випробовуваного регулятора. Пристрій має несучий каркас 1, на якому встановлено силовий пневматичний циліндр 2 односторонньої дії. До пневмоциліндра 2 підведено повітропровід 3 з встановленими на ньому манометром 4 для контролю робочого тиску, запобіжним клапаном 5 і триходовим краном 6, який має атмосферний отвір 7 і ручку 8. За допомогою ручки 8 триходовий кран 6 можна поставити в одне з трьох положень: "відпуск" (показано на кресленні), "перекриття" і "гальмування". До триходового крана 6 під'єднано постачальний повітропровід 9 з манометром 10 для контролю тиску, що надходить від джерела стисненого повітря, і роз'єднувальним краном 11. Пневмоціліндр 2 містить відпускну пружину 12, а його шток 13 шарнірно зв'язано з проміжним важелем 14, який має отвір 15 для шарнірної підвіски на каркасі 1. Проміжний важіль 14 короткою тягою 16 шарнірно зв'язано з переднім важелем 17, що має два отвори 18 і 19 для шарнірної підвіски на каркасі 1. Наявність двох отворів для підвіски переднього важеля 17 2 UA 99104 U 5 10 15 20 25 30 35 40 45 50 55 60 рекомендована для "наукового" та "навчального" варіантів конструкцій запропонованого пристрою. При цьому отвір 18, який ближче до пневмоциліндра 2, відповідає застосуванню на вагоні гальмових колодок із композитних матеріалів, а отвір 19 - чавунних гальмових колодок. Типовий випробовуваний авторегулятор 20 шарнірно під'єднують вушком до переднього важеля 17, а штангою - до демпферного пристрою (його на кресленні умовно не показано) заднього важеля 21. Для збільшення довжини авторегуляторів, які коротші за типові, між штангою авторегулятора і демпферим пристроєм заднього важеля 21 встановлюють знімний адаптер 22. На задньому важелі 21 встановлено вузол імітації гальмової колодки 23, а сам цей важіль шарнірно прикріплено до каркаса 1. Напівжорстка ланка 24 шарнірно зв'язує проміжний важіль 14 і черв'ячний сектор 25, який має можливість обертатись навколо точки підвіски на каркасі 1. У зчепленні з сектором 24 постійно знаходиться черв'як 26, вал 27 якого шарнірно прикріплено до каркаса 1. З одного (верхнього за кресленням) кінця вал 27 обладнано штурвалом 28 для обертання вручну, а з другого - через муфту 29 вал 27 зв'язано з електромотором 30. Для керування електроприводом призначено пульт 31 з трьома кнопками: "стоп", "пуск" і "реверс", які відповідають режимам функціонування пристрою від пневматичного привода "перекриття", "гальмування" і "відпуск". Для автоматизації зупинки електромотора 30 у крайніх положеннях кінематичного ланцюга пристрою "повний відпуск" і "повне гальмування" в певних місцях на каркасі 1 встановлено кінцеві вимикачі 32 і 33 відповідно. Електрична схема передбачає наявність типових елементів безпеки та контролю напруги, які на кресленні умовно не показано. При здійсненні заявленого способу запропонований пристрій працює або від пневмоциліндра 2, або від електродвигуна 30, або під дією на штурвал 28 ручного привода. Робота пристрою від пневмоцилідра 2 в цілому не відрізняється від функціонування стендапрототипа. При цьому завдяки напівжорсткій ланці 24 автоматично виключається можливість руйнування передачі незворотного принципу дії (черв'ячної за кресленням). Заявлений спосіб за допомогою пристрою під дією ручного привода здійснюють так. Спочатку виконують наступні підготовчі операції. Ручку 8 триходового крана 6 поставити у положення "відпуск" (як на кресленні). Дочекатись відсутності надлишкового тиску в пневмосистемі за показами манометра 4. Згідно з методикою випробування авторегулятора шляхом установки валика в отвір 18 або в отвір 19, вибрати точку обертання переднього важеля 17 на каркасі 1. Авторегулятор 20, який підлягає випробовуванню, шарнірно закріпити між переднім 17 і заднім 21 важелями пристрою. Встановити потрібні зазори "А" та "К". Для відпрацювання режиму "гальмування" обертати штурвал 28 у напрямку годинникової стрілки (це загальна у світі вимога для ручного гальма залізничних вагонів) за допомогою пари черв'як 26 і сектор 25 натягувати напівжорстку ланку 24. Це призведе до стиснення відпускної пружини 12 (а отже і до накопичування нею потенційної енергії) пневмоциліндра 2 і виходу його штока 13 та обертання проміжного важеля 14 навколо точки 15 (за кресленням - за годинниковою стрілкою), що, у свою чергу, призведе до обертання переднього 17 і заднього 21 важелів навколо їх точок шарнірного закріплення на каркасі 1 (за кресленням - проти годинникової стрілки). Зазначене обертання переднього 17 і заднього 21 важелів буде тривати до вибору меншого із зазорів А чи К. Подальшим обертанням за годинниковою стрілкою штурвала ручного привода оператор прикладає потрібне розтягувальне зусилля (з контролем відповідними засобами пристрою рівня цього зусилля, як варіант - автоматичним) до випробовуваного авторегулятора. Режим "перекриття", тобто фіксація на потрібний час відповідно до методики випробування певного рівня розтягувального зусилля, що прикладене до випробовуваного авторегулятора, забезпечується автоматично у будь-який момент часу завдяки передачі незворотного принципу дії (за кресленням - черв'як-сектор). Для цього оператор припиняє справляти дію на ручний привод. На режимі "відпуск" оператор обертанням штурвала 28 ручного привода проти руху годинникової стрілки поступово зменшує на тяжіння напівжорсткої ланки 24 аж до повного зняття зусилля. Одночасно зі зменшенням названого зусилля під дією всіх пружин, які було стиснуто на режимі "гальмування", відбувається зворотний рух усього кінематичного ланцюга пристрою по відношенню до режиму "гальмування" та зняття розтягувального зусилля з випробовуваного авторегулятора. На режимі "гальмування" щонайменш були стиснуті дві пружини: відпускна пружина 12 пневмоциліндра 2 та пружина демпферного пристрою на задньому важелі 21. При випробуванні авторегулятора на стягування гальмової важільної передачі додатково до двох зазначених пружин на режимі "гальмування" також стискаються і пружини, наявні у конструкції самого випробовуваного авторегулятора. 3 UA 99104 U 5 10 15 20 25 30 35 40 45 50 Після випробувань - уручну від'єднати авторегулятор від пристрою. При здійсненні заявленого способу за допомогою пристрою під дією електропривода спочатку виконують такі самі підготовчі операції, як і для випадку ручного привода, та пересвідчуються у наявності напруги в електромережі. Далі, у випадку запровадження автоматичного режиму функціонування слід натиснути кнопку "пуск", і після отримання сигналу про завершення випробування, вручну зняти авторегулятор з пристрою. У випадку напівавтоматичного режиму - діяти так. Для відпрацювання режиму "гальмування" слід натиснути кнопку "пуск" на пульті 31, а після досягнення потрібного рівня розтягувального зусилля на випробовуваному авторегуляторі за даними відповідних засобів контролю пристрою - натиснути кнопку "стоп". При цьому на режимі "повного гальмування", тобто найбільшого розтягувального зусилля, пристрій з метою забезпечення безпеки вимикається автоматично внаслідок досягнення черв'ячним сектором свого одного з крайніх положень (верхньою за кресленням) і натиснення ним на кінцевий вимикач 33. Для відпрацювання режиму "перекриття" на пульті 31 у потрібний момент часу натискають кнопку "стоп", а витримка досягнутого рівня розтягувального зусилля на випробовуваному авторегуляторі забезпечується автоматично, так само як і при функціонування пристрою на ручному приводі. Для відпрацювання режиму "відпуск" на пульті 31 натискають кнопку "реверс". При цьому режим "повний відпуск", тобто повне зняття з випробовуваного авторегулятора розтягувального зусилля, досягається автоматично внаслідок досягнення черв'ячним сектором свого другого крайнього положення (нижнього за кресленням) і натиснення ним на кінцевий вимикач 32. При виготовленні заявленого пристрою можуть бути застосовані вузли, що випускають серійно, а послідовність дій при реалізації заявленого способу наближена до існуючої технології випробувань авторегуляторів, тому можливість практичного втілення корисної моделі та її промислове застосування не викликають сумнівів. Відповідно до заявленої корисної моделі, можуть бути модернізовані типові стенди вагонних депо України, що дозволить забезпечити проведення випробувань безколісних авторегуляторів односторонньої дії гальмової важільної передачі вагонів у випадку відсутності стисненого повітря. Також пристроями запропонованої конструкції можуть бути облаштовані як наукові заклади для виконання досліджень за відповідною тематикою, так і навчальні заклади для проведення лабораторних робіт в межах дисциплін відповідного фахового спрямування з метою вивчення технології ремонту авторегуляторів, їх робочих процесів та устрою. Енергозбереження при запровадженні корисної моделі полягає в тому, що в разі використання пневматичного привода, як це має місце у відомих конструкцій стендів для випробувань авторегуляторів, потрібно мати джерело стисненого повітря, тобто компресор, який повинен постійно підгримувати робочий тиск повітря у повітрозбірнику. Стиснене повітря з повітрозбірника витрачається на випробування авторегуляторів лише в момент проведення випробувань, а переважний час воно втрачається через неминучі витоки до атмосфери. Отже значний час компресор розтрачує енергію дарма. При застосуванні електропривода для запропонованого пристрою енергія витрачається тільки в момент проведення випробувань, що і призводить до ефекту енергозбереження. Промислові компресори живляться від електродвигунів, тобто в даному контексті їх можна розглядати як проміжні елементи системи, які зменшують її коефіцієнт корисної дії. Запропонований пристрій з електроприводом та/або ручним приводом повністю усуває потребу в стисненому повітрі для випробувань авторегуляторів. До того ж утримання компресорної станції, судин і трубопроводів, що працюють під тиском, значно дорожче за утримання електродвигуна. В разі застосування запропонованого пристрою з ручним приводом взагалі випробування авторегуляторів можна здійснювати автономно від промислових джерел енергії. Такий режим застосування корисної моделі можна, наприклад, рекомендувати з метою навчання у навчальних закладах, коли продуктивність праці при випробуванні авторегуляторів є другорядною. Також ручний привод буде принагідним для випробувань авторегуляторів на підприємствах, як тимчасовий при перебої з електрикою, або ж при відмові компресорної станції. 55 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 60 Спосіб випробувань безколісних авторегуляторів односторонньої дії гальмівної важільної передачі залізничних вагонів, що включає операції розтягування авторегулятора до потрібного 4 UA 99104 U зусилля та витримки цього зусилля на потрібний час, які виконують за допомогою пневмопривода та передавального механізму зворотного принципу дії, який відрізняється тим, що привод використовують електричний та/або ручний. 5 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюDmytriiev Dmytro Viktorovych, Valihura Mykola Yakymovych
Автори російськоюДмитриев Дмитрий Викторович, Валигура Николай Акимович
МПК / Мітки
МПК: G01M 99/00
Мітки: гальмівної, авторегуляторів, безколісних, передачі, дії, залізничних, важільної, односторонньої, вагонів, випробувань, спосіб
Код посилання
<a href="https://ua.patents.su/7-99104-sposib-dlya-viprobuvan-bezkolisnikh-avtoregulyatoriv-odnostoronno-di-galmivno-vazhilno-peredachi-zaliznichnikh-vagoniv.html" target="_blank" rel="follow" title="База патентів України">Спосіб для випробувань безколісних авторегуляторів односторонньої дії гальмівної важільної передачі залізничних вагонів</a>
Стенд для випробувань безкулісних авторегуляторів гальмових важільних передач залізничних вагонів
Номер патенту: 65385
Опубліковано: 12.12.2011
Автори: Кельріх Мусій Борисович, Дмитрієв Дмитро Вікторович, Валігура Микола Якимович
МПК: B61H 15/00
Мітки: стенд, важільних, авторегуляторів, передач, залізничних, вагонів, гальмових, безкулісних, випробувань
Формула / Реферат:
Стенд для випробувань безкулісних авторегуляторів гальмових важільних передач залізничних вагонів, що містить на несучому каркасі об'єднані передній та задній вузли кріплення випробовуваного авторегулятора, пристрій встановлення зазору між корпусом авторегулятора та каркасом стенда, вузол упору з пристроєм встановлення зазору між імітаторами гальмової колодки та колеса вагона на стенді, демпферний пристрій, та пульт керування з приладами...
Спосіб відновлення цапф тріангелів гальмівної важільної передачі вагонів
Номер патенту: 10318
Опубліковано: 15.11.2005
Автори: Кузіна Тетяна Володимирівна, Панасенко Віталій Якович
МПК: B60S 5/00
Мітки: відновлення, тріангелів, цапф, вагонів, важільної, гальмівної, спосіб, передачі
Формула / Реферат:
Спосіб відновлення цапф тріангелів гальмівної важільної передачі вагонів, при якому наплавляють метал на зношену поверхню цапфи, після чого обробляють поверхню наплавленого металу, відновлюють отвір під шплінт в цапфі та нарізають різьбу по обробленій поверхні, який відрізняється тим, що перед наплавленням в отвір під шплінт встановлюють стержень з металу, що не зварюється з металом цапфи (наприклад мідний) та металом, який наплавляється,...
Стенд для випробування повітророзподільних апаратів гальмівної системи залізничних вагонів
Номер патенту: 95013
Опубліковано: 10.12.2014
Автори: Боряк Костянтин Федорович, Волков Сергій Леонідович, Ленков Сергій Васильович
МПК: B61H 15/00, B61H 1/00
Мітки: вагонів, випробування, залізничних, гальмівної, системі, стенд, апаратів, повітророзподільних
Формула / Реферат:
Стенд для випробування повітророзподільних апаратів гальмівних систем залізничних вагонів, що складається із запірного органу, який зв'язано з виконавчим органом, вхід якого зв'язано трубопроводом із джерелом стислого повітря, а вихід із блоком перевірки, причому виконавчий орган виконано у вигляді набору дроселів з різними діаметрами отвору та засувки, яка розташована між його входом та дроселями, який відрізняється тим, що як дроселі...
Тріангель гальмової важільної передачі

Номер патенту: 17331
Опубліковано: 15.09.2006
Автори: Гамзалов Станіслав Джахпарович, Лашко Анатолій Дмитрович, Омельяненко Ігор Олександрович, Радзіховський Адольф Олександрович, Тімошина Лариса Адольфівна, Воронович Віктор Петрович, Назаренко Костянтин Віталійович, Дейнеко Сергій Юрійович
МПК: B61H 13/00
Мітки: тріангель, важільної, передачі, гальмової
Формула / Реферат:
1. Гальмовий тріангель важільної передачі, що містить балку зі струною, що розділені в середній частині розпіркою, а по кінцевих частинах з'єднані за допомогою вузла передачі зусилля, що складається з послідовно встановлених упорної скоби, закладки, гальмового башмака з колодкою та наконечника, закріплених від подовжніх переміщень за допомогою пристрою, що містить пружний елемент, який відрізняється тим, що пружний елемент виконаний у вигляді...
Стенд для випробування автозчепу залізничних вагонів
Номер патенту: 87375
Опубліковано: 10.02.2014
Автори: Коросташевський Павло Володимирович, Коросташевський Євген Володимирович, Тарасенко Галіна Степанівна, Кошанська Євгенія Михайлівна
МПК: G01M 7/00
Мітки: випробування, вагонів, автозчепу, залізничних, стенд
Формула / Реферат:
Стенд для випробування автозчепу залізничних вагонів, що містить раму із установленою на ній поворотною консоллю з опорним роликом, фіксатором положень і гніздом для установки й кріплення випробовуваної автозчепу й пересувний візок, який розташовано на закріпленій на рамі колії його переміщення, що забезпечений приводом переміщення у вигляді силового циліндра й встановленим на ньому у вертикальних напрямних піднімальним столом зі штатним...
Попередній патент: Різак для кругового сканування лазерного променя
Наступний патент: Спосіб виробництва бурякового барвника
Випадковий патент: Спосіб виготовлення катода хімічного джерела струму