Верстат з механізмом паралельної структури і мехатронною системою
Формула / Реферат
Верстат з механізмом паралельної структури і мехатронною системою, що складається з несучої системи, рухомої платформи з робочим органом, наприклад інструментальним шпинделем, штанг із змінно-керованою довжиною від приводів повздовжнього переміщення, кінцеві вихідні елементи яких шарнірно зв'язані відповідно з несучою системою та рухомою платформою, а між рухомою платформою та несучою системою верстата шарнірно встановлені перетворювачі лінійних переміщень, які утворюють додатковий просторовий механізм паралельної структури, шарніри якого встановлені на рухомій платформі, з одного боку, та несучій системі, з другого боку, а виходи перетворювачів лінійних переміщень завдяки зворотному зв'язку зв'язані з системою числового програмного керування (ЧПК), наприклад персональним комп'ютером, для забезпечення можливості порівняння заданого і фактичного переміщення робочого органу і здійснення корекції керуючих сигналів в приводи повздовжнього переміщення, який відрізняється тим, що перетворювачі лінійних переміщень розташовані аксіально, тобто паралельно осі штанг із зміно-керованою довжиною, або співвісно всередині цих штанг, причому відстані між кінцевими вихідними елементами штанг і перетворювачів однакові або співпадають.
Текст
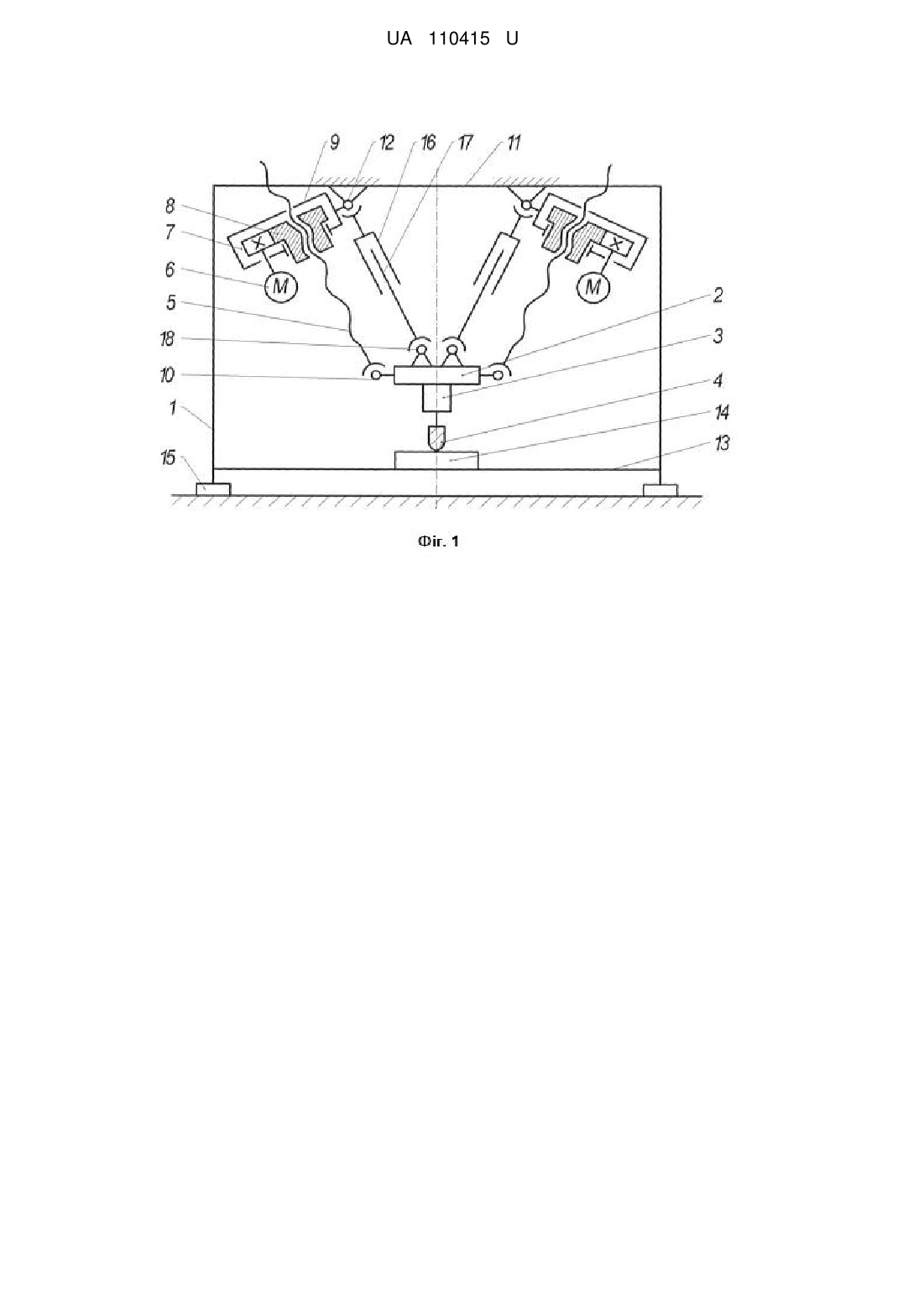
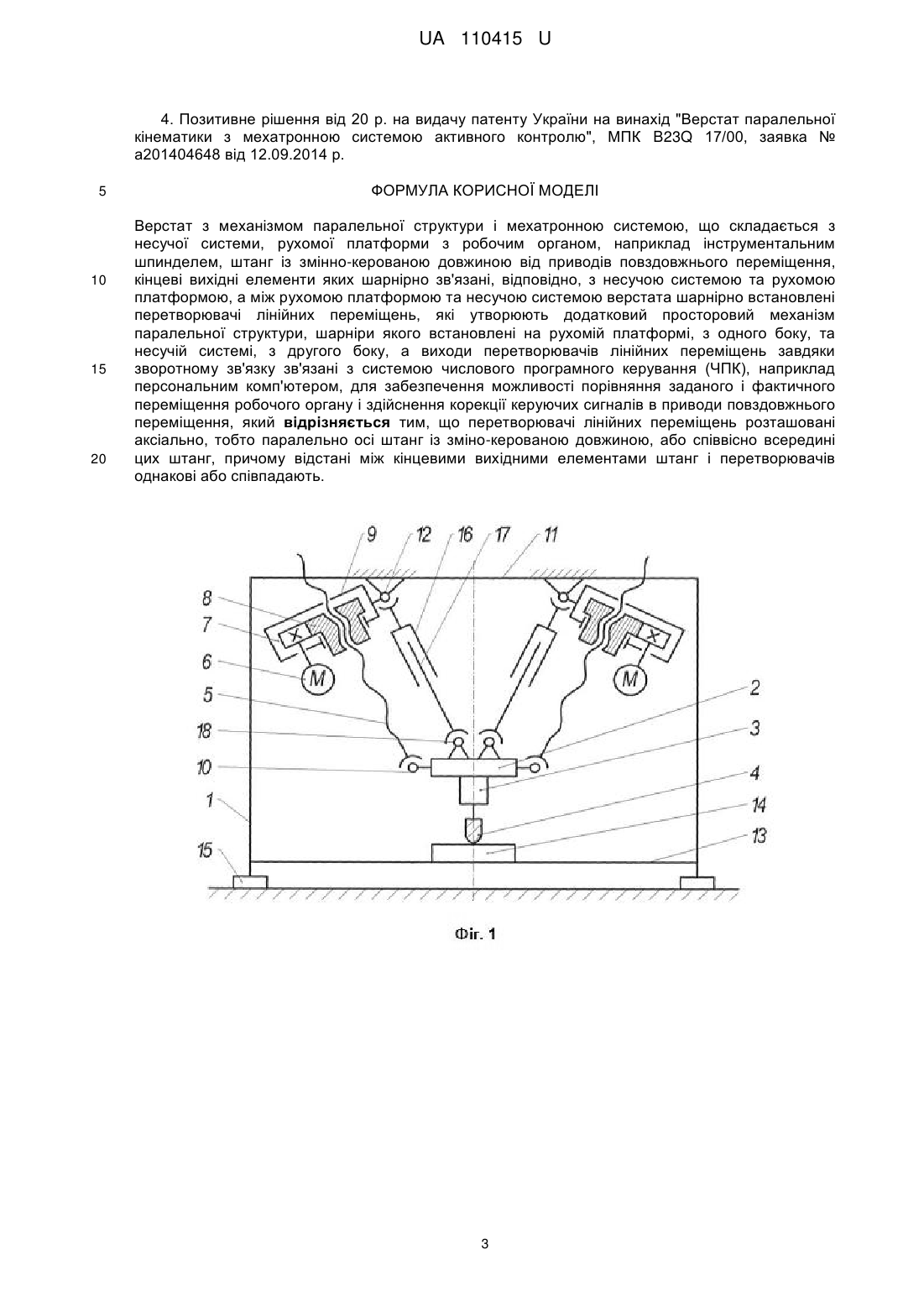
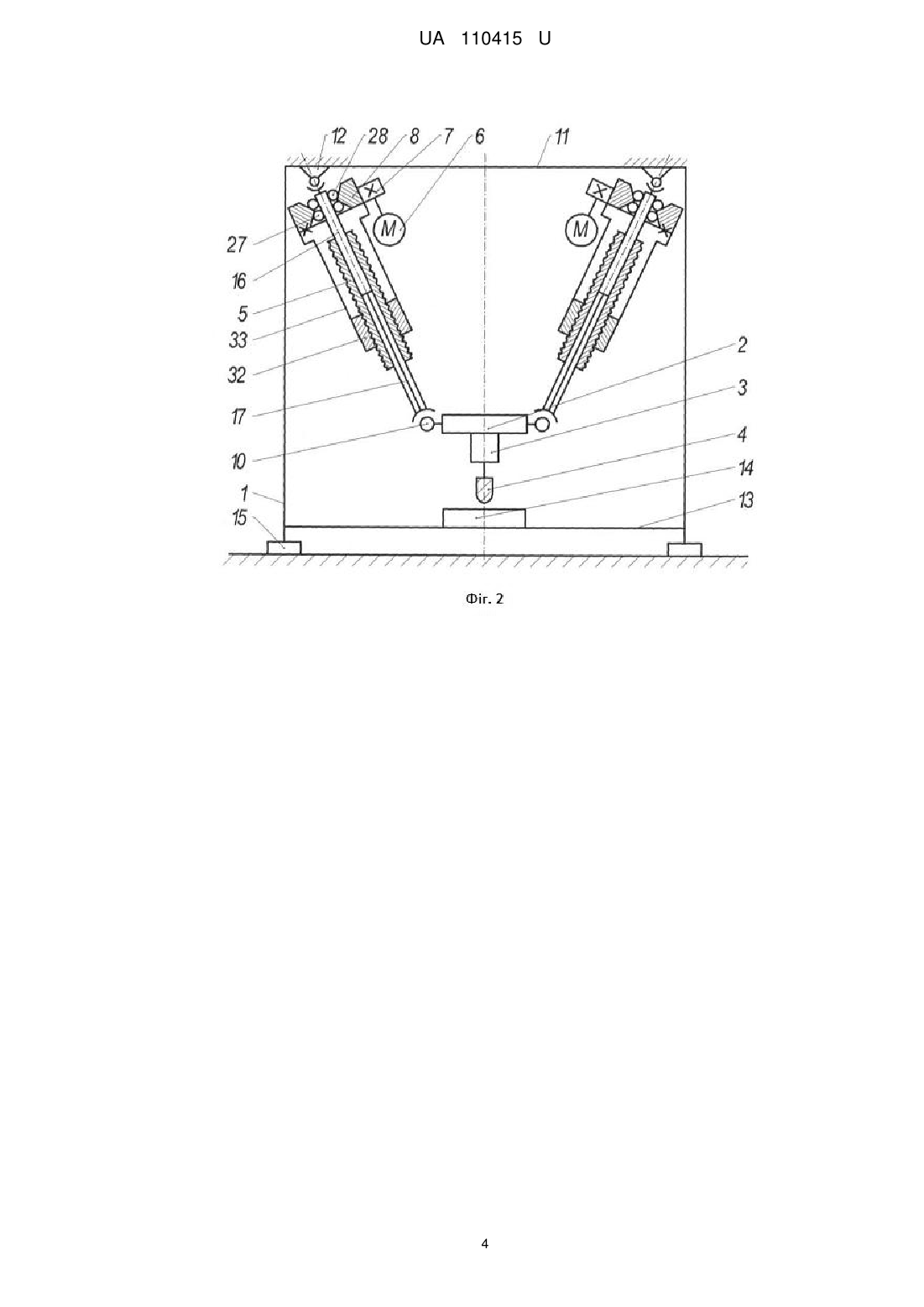
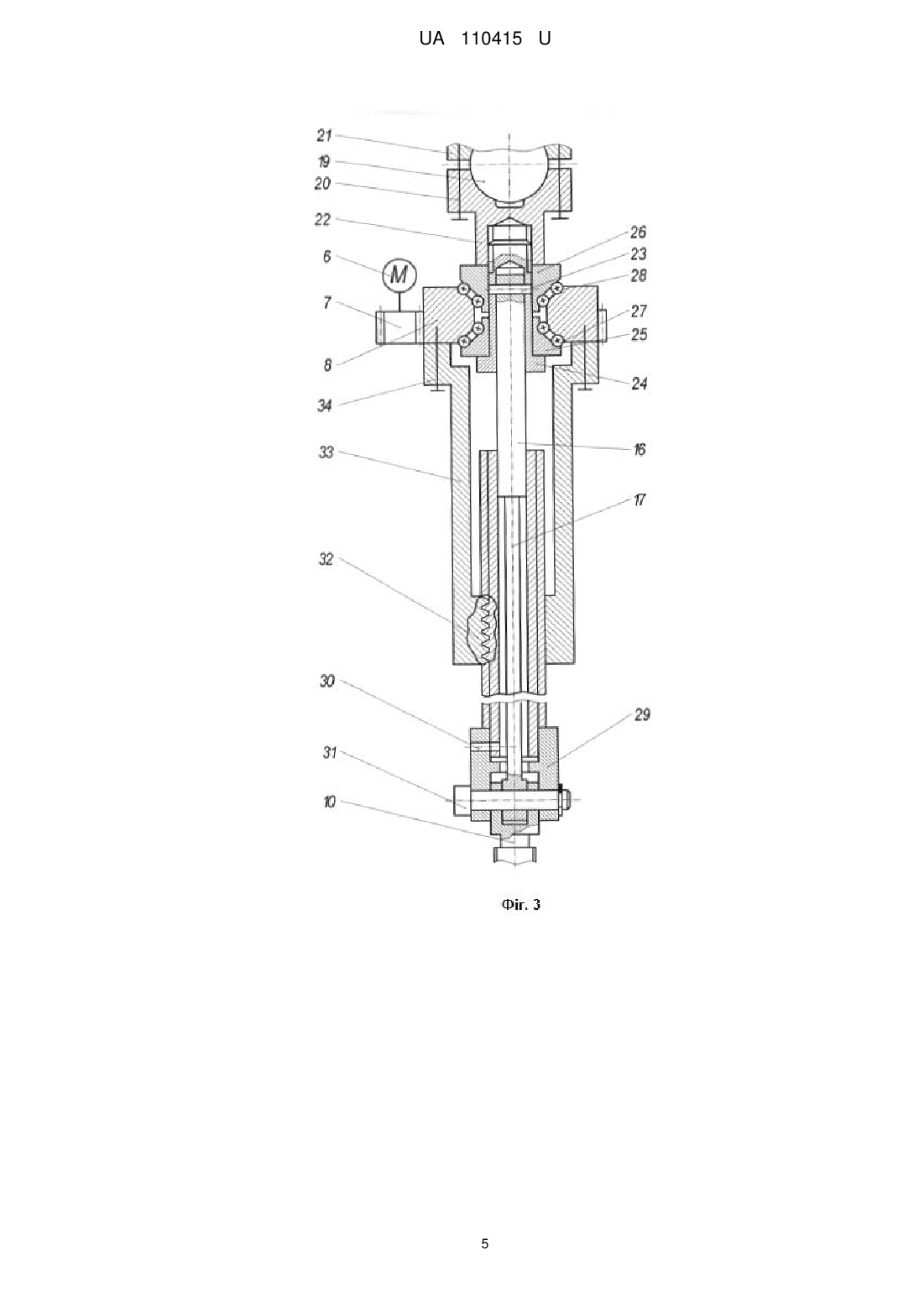
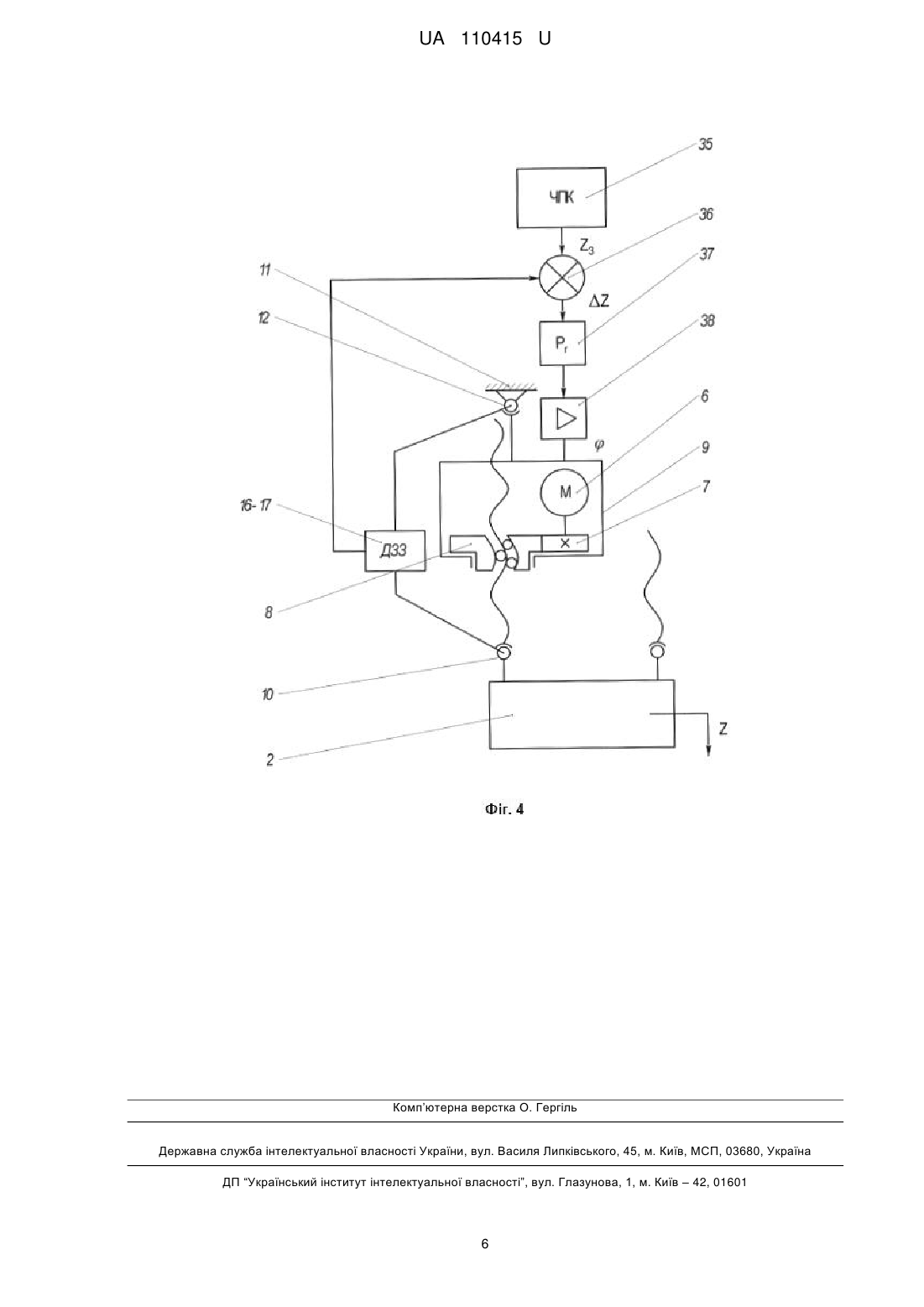
Реферат: Верстат з механізмом паралельної структури і мехатронною системою складається з несучої системи, рухомої платформи з робочим органом, наприклад інструментальним шпинделем, штанг із змінно-керованою довжиною від приводів повздовжнього переміщення, кінцеві вихідні елементи яких шарнірно зв'язані, відповідно, з несучою системою та рухомою платформою. Між рухомою платформою та несучою системою верстата шарнірно встановлені перетворювачі лінійних переміщень, які утворюють додатковий просторовий механізм паралельної структури, шарніри якого встановлені на рухомій платформі, з одного боку, та несучій системі, з другого боку, а виходи перетворювачів лінійних переміщень завдяки зворотному зв'язку зв'язані з системою числового програмного керування. Перетворювачі лінійних переміщень розташовані аксіально, тобто паралельно осі штанг із зміно-керованою довжиною, або співвісно всередині цих штанг, причому відстані між кінцевими вихідними елементами штанг і перетворювачів однакові або співпадають. UA 110415 U (54) ВЕРСТАТ З МЕХАНІЗМОМ ПАРАЛЕЛЬНОЇ СТРУКТУРИ І МЕХАТРОННОЮ СИСТЕМОЮ UA 110415 U UA 110415 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі верстатобудування і може бути використана для виконання різноманітних фрезерних, свердлильних, розточувальних операцій при обробці точних складнопрофільних деталей на верстатах з механізмами паралельної структури, оснащених штангами змінно-керованої довжини типу біпод, трипод, гексапод. Відомі компоновки триподів рамної конструкції [1], які складаються з трьох симетрично встановлених телескопічних штанг, зв'язаних шарнірно одним кінцем з виконавчим органом, а іншим з основою. Ці штанги працюють на розтягування-стискання. Додаткова штанга, що розміщена в центрі, сприймає деформації згину від виконавчого органу, що підвищує жорсткість системи і точність обробки, але зменшує розмір і ускладнює форму робочого простору. Відомі конструкції технологічного обладнання з паралельною кінематикою, що складаються з шести штанг, виконаних у вигляді шариково-гвинтових пар з корпусами, які шарнірно з'єднано з несучою системою верстата [2]. Основними недоліками даних конструкцій є відсутність системи активного контролю та відповідна неможливість контролю положення інструмента верстата при безпосередній обробці деталей на даному верстаті, що зменшує точність обробки. Відома також конструкція верстата паралельної кінематики [3], що складається з нерухомої платформи зі столом, рухомої платформи з робочим органом, шести механізмів поздовжнього переміщення, корпуси та вихідні елементи яких шарнірно зв'язані відповідно з нерухомою та рухомою платформами. Шарніри механізмів поздовжнього переміщення виконані з можливістю їх переміщення вздовж напрямних, розташованих на нерухомій платформі. Недоліком подібного верстата паралельної кінематики є відсутність системи активного контролю положення інструмента верстата. Це призводить до невизначеності положення інструмента у межах робочого простору, можливості виникнення "сингулярних" положень, що значно знижує точність обробки. Найближчим аналогом є верстат паралельної кінематики з мехатронною системою активного контролю [4], що складається з несучої системи, рухомої платформи з робочим органом, механізмів поздовжнього переміщення, корпуси і вихідні елементи яких шарнірно зв'язані відповідно з несучою системою та рухомою платформою, причому між рухомою платформою та несучою системою верстата шарнірно встановлено додатковий просторовий механізм паралельної структури, який містить перетворювачі лінійних переміщень, при цьому аналогові сигнали з перетворювачів перетворюються у цифровий за допомогою аналоговоцифрового перетворювача (АЦП) та передаються на персональний комп'ютер, де відображаються та обробляються за допомогою розробленого програмного забезпечення, в якому розраховуються матриці Якобі для верстату та додаткового просторового механізму, на основі яких визначаються довжини штанг верстата, що порівнюються із заданими в системі керування з можливістю корекції законів керування. До недоліків найближчого аналога належить: по-перше, обмеження робочої зони внаслідок зменшення переміщення по координатах; по-друге, дуже дороге програмно-математичне забезпечення і ускладнення системи ЧПК внаслідок зайвих операцій з використанням додаткових елементів корегування програми; по-третє, підвищення трудомісткості виготовлення введенням додаткового механізму паралельної структури і додаткової (зайвої) платформи; почетверте, неможливість підвищення точності контролю і обробки деталей; по-п'яте, низька надійність роботи мехатронної системи. В основу корисної моделі поставлена задача удосконалення верстата з механізмом паралельної структури і мехатронною системою шляхом розташування перетворювачів лінійних переміщень аксiально до штанг із змінно-керованою довжиною, що дозволяє досягнути технічний результат - підвищення надійності роботи мехатронної системи, точності формоутворюючих рухів і обробки деталей при зниженні трудомісткості виготовлення верстата. Поставлена задача вирішується тим, що у запропонованому верстаті, що складається з несучої системи, рухомої платформи з робочим органом, наприклад інструментальним шпинделем, штанг із змінно-керованою довжиною від приводів поздовжнього переміщення, кінцеві вихідні елементи яких шарнірно зв'язані відповідно з несучою системою верстата, шарнірно встановлені перетворювачі лінійних переміщень, які утворюють додатковий просторовий механізм паралельної структури, шарніри якого встановлені на рухомій платформі, з одного боку, та несучій системі, з другого боку, а виходи перетворювачів лінійних переміщень завдяки зворотному зв'язку зв'язані з системою числового програмного керування (ЧПК), наприклад персональним комп'ютером, для забезпечення можливості порівняння заданого і фактичного переміщення робочого органу і здійснення корекції керуючих сигналів в приводи повздовжнього переміщення, згідно з корисною моделлю, перетворювачі лінійних переміщень розташовані аксіально, тобто паралельно осі штанг із змінно-керованою довжиною або співвісно 1 UA 110415 U 5 10 15 20 25 30 35 40 45 всередині цих штанг, причому відстані між кінцевими вихідними елементами штанг і перетворювачів однакові або співпадають. Суть корисної моделі пояснюється кресленнями, на яких зображено: фіг. 1 - принципова схема верстата з механізмом паралельної структури і перетворювачами лінійних переміщень, розташованих паралельно осі штанг із змінно-керованою довжиною (варіант 1); фіг. 2 принципова схема верстата з механізмом паралельної структури і перетворювачами лінійних переміщень, розташованих співвісно всередині штанг із змінно-керованою довжиною; фіг. 3 повздовжній переріз А-А конструктивного виконання співвісних штанг, фіг. 2; фіг. 4 - блок-схема мехатронної системи активного контролю просторового положення інструмента запропонованого верстата, фіг. 1 і 2. Верстат містить несучу систему 1 (фіг. 1), рухому платформу 2 з робочим органом інструментальним шпинделем 3 та інструментом 4, наприклад фрезою, штанги 5 із зміннокерованою довжиною від приводів повздовжнього переміщення. Ці приводи складаються з крокових (або слідкуючих) електродвигунів 6, зубчатих передач - зубчастих коліс 7 і 8, причому колесо 8 виконано за одне ціле або жорстко зв'язано з гайкою (шестірня - гайка 8). Кількість штанг 5 і приводів 6-8 може бути від 2-х до 6-ти (2,3,4,5,6), зокрема розповсюджені дві штанги (біпод), три (трипод), шість (гексапод). Кожна зубчасто-гвинтова передача розташована в корпусі 9 і за допомогою шарнірного з'єднання 10 зв'язана з рухомою платформою 2 і траверсою 11 за допомогою шарнірного з'єднання 12. Несуча система 1 за рахунок траверси 11 і основи 13, на якій розміщується деталь 14, що оброблюється, утворюють замкнений каркас на опорах 15. Паралельно осі штанги 5, виконаної у вигляді гвинта, розташований перетворювач лінійних переміщень (наприклад у вигляді індуктивного датчика зворотного зв'язку), який містить нерухому частину 16, кінець якої з'єднаний з шарніром 12 на траверсі 11, і поступально-рухому частину - шток 17, кінець якого з'єднаний через шарнір 18 з рухомою платформою 2. В другому варіанті виконання верстата (фіг. 2) гвинт 5 виконаний з порожниною у вигляді наскрізного отвору, всередині якого розміщений перетворювач лінійних переміщень, один кінець якого через шарнір 12 з'єднаний з траверсою 11, а другий кінець разом з гвинтом 5 з'єднаний через шарнір 10 з рухомою платформою 2. Конструктивно фрагмент варіанта 2 наглядно поданий на фіг. 3, де шарнірне з'єднання 12 (фіг. 2) виконано із сферичного пальця 19 (фіг. 3), з'єднаних між собою гвинтами 20 частинами 21 і 22. Нерухома частина 16 перетворювача лінійних переміщень за допомогою штифта 23 жорстко зв'язана через втулку 24 через різьбу з частиною 22. Зубчасте колесо 8 обертається на спеціальних підшипниках кочення з внутрішніми кільцями 25 і 26 з кульками 27 і 28 відповідно. Нижнє шарнірне з'єднання 10 (фіг. 2) об'єднує кінці штанги змінно-керованої довжини і перетворювача лінійних переміщень за допомогою вилки 29, штифта 30 і пальця 31.З'єднання гайки 32 (фіг. 2, 3) з зубчастим колесом 8 виконано через втулку 33 за допомогою гвинтів 34 (фіг. 3). Верстат з механізмом паралельної структури і мехатронною системою працює наступним чином (фіг. 4): керуючий сигнал - задана координата Zз від системи ЧПК перетворюється у кут повороту φ вала електродвигуна 6 (М) і за допомогою зубчасто-гвинтової пари 7,8 в координатне переміщення Z, яке вимірюється перетворювачем лінійних переміщень 16-17, що виконує функції датчика зворотного зв'язку (Д33). Відповідний сигнал надходить у систему регулювання через суматор 36, де формується сигнал розузгодження: ΔZ=Zз-Z. Залежно від сигналу розузгодження з метою оптимізації динамічної поведінки приводу у регуляторі 37 (Рт) створюється регулюючий вплив, який через підсилювач 38 обумовлює зменшення величини розузгодження. При цьому кутова швидкість вала електродвигуна 6 (М) пропорційна величині розузгодження, а при ΔZ=0 виконавчий орган - рухома платформа 2 займає задане програмою положення, забезпечуючи точність формоутворюючих рухів. 50 55 Джерела інформації: 1. Валявський І.А., Крижанівський В.А. Тенденції розвитку верстатів паралельної структури. Вісник Сум ДУ, 2003. - № 2 (48). - С. 18-22 (фиг. 3). 2. Кузнецов Ю.М., Дмитрієв Д.А., Діневич Г.Ю. Компоновка верстатів з механізмами паралельної структури / під ред. Ю.М. Кузнецова. - Херсон: ПП Вишемирський B.C., 2009. - 456 с. (С. 182-186, фиг. 4.3-4.6). 3. Патент України на винахід № 54937. Верстат-гексапод. МПК B21D 5 / Крижанівський В.А., Валявський І.А., опубл. 17.03.2003, Бюл. № 3. 2 UA 110415 U 4. Позитивне рішення від 20 р. на видачу патенту України на винахід "Верстат паралельної кінематики з мехатронною системою активного контролю", МПК B23Q 17/00, заявка № а201404648 від 12.09.2014 р. 5 10 15 20 ФОРМУЛА КОРИСНОЇ МОДЕЛІ Верстат з механізмом паралельної структури і мехатронною системою, що складається з несучої системи, рухомої платформи з робочим органом, наприклад інструментальним шпинделем, штанг із змінно-керованою довжиною від приводів повздовжнього переміщення, кінцеві вихідні елементи яких шарнірно зв'язані, відповідно, з несучою системою та рухомою платформою, а між рухомою платформою та несучою системою верстата шарнірно встановлені перетворювачі лінійних переміщень, які утворюють додатковий просторовий механізм паралельної структури, шарніри якого встановлені на рухомій платформі, з одного боку, та несучій системі, з другого боку, а виходи перетворювачів лінійних переміщень завдяки зворотному зв'язку зв'язані з системою числового програмного керування (ЧПК), наприклад персональним комп'ютером, для забезпечення можливості порівняння заданого і фактичного переміщення робочого органу і здійснення корекції керуючих сигналів в приводи повздовжнього переміщення, який відрізняється тим, що перетворювачі лінійних переміщень розташовані аксіально, тобто паралельно осі штанг із зміно-керованою довжиною, або співвісно всередині цих штанг, причому відстані між кінцевими вихідними елементами штанг і перетворювачів однакові або співпадають. 3 UA 110415 U 4 UA 110415 U 5 UA 110415 U Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B23B 35/00, B23Q 5/00, B23Q 17/00
Мітки: структури, мехатронною, паралельно, механізмом, верстат, системою
Код посилання
<a href="https://ua.patents.su/8-110415-verstat-z-mekhanizmom-paralelno-strukturi-i-mekhatronnoyu-sistemoyu.html" target="_blank" rel="follow" title="База патентів України">Верстат з механізмом паралельної структури і мехатронною системою</a>
Верстат паралельної кінематики з мехатронною системою активного контролю
Номер патенту: 111381
Опубліковано: 25.04.2016
Автори: Дем'яненко Анатолій Сергійович, Струтинський Василь Борисович
МПК: B23Q 5/34
Мітки: системою, верстат, контролю, мехатронною, паралельно, кінематики, активного
Формула / Реферат:
Верстат паралельної кінематики, що складається з несучої системи, рухомої платформи з робочим органом, шести механізмів повздовжнього переміщення, корпуси та вихідні елементи яких шарнірно зв'язані відповідно з несучою системою та рухомою платформою, при цьому шарніри механізмів повздовжнього переміщення виконані з можливістю їх переміщення вздовж напрямних, розташованих на несучій системі, який відрізняється тим, що між рухомою платформою...
Верстат
Номер патенту: 35586
Опубліковано: 25.09.2008
Автори: Заїка Сергій Миколайович, Кириченко Андрій Миколайович
МПК: B23D 5/00
Мітки: верстат
Формула / Реферат:
Верстат, що містить станину з столом, рухому платформу, встановлену на напрямних станини, робочий орган, шарнірно зв'язаний з рухомою платформою двома ланками, що утворюють паралелограмний поворотний механізм та шарнірно з'єднані між собою за допомогою штанги змінної довжини, який відрізняється тим, що робочий орган шарнірно з'єднано з рухомою платформою за допомогою штанги змінної довжини.
Привід точних лінійних переміщень для механізму паралельної кінематики
Номер патенту: 73308
Опубліковано: 25.09.2012
Автори: Юрчишин Оксана Ярославівна, Струтинський Сергій Васильович
МПК: F16H 25/22
Мітки: кінематики, лінійних, паралельно, привід, переміщень, точних, механізму
Формула / Реферат:
Привід точних лінійних переміщень для механізму паралельної кінематики, який складається із двигуна, зубчастої передачі та гвинтової передачі, розміщеної в порожнистій штанзі з гайкою із можливістю переміщення штанги відносно трубчастого корпусу штанги, який відрізняється тим, що в трубчастій штанзі встановлені дискретні пневмо- або гідроприводи швидких переміщень, при цьому двигун встановлено на нерухомій основі, а зубчаста передача...
Верстат-гексапод
Номер патенту: 54937
Опубліковано: 17.03.2003
Автори: Валявський Іван Анатолійович, Крижанівський Володимир Андрійович
МПК: B21D 5/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, який складається з нерухомої платформи зі столом, рухомої платформи з робочим органом, шести механізмів поздовжнього переміщення, корпуси та вихідні елементи яких шарнірно зв'язані відповідно з нерухомою та рухомою платформами, який відрізняється тим, що шарніри механізмів поздовжнього переміщення виконані з можливістю їх переміщення вздовж напрямних, розташованих на нерухомій платформі.
Верстат
Номер патенту: 35360
Опубліковано: 10.09.2008
Автори: Кириченко Андрій Миколайович, Вахніченко Дмитро Володимирович, Заїка Сергій Миколайович
МПК: B23D 5/00
Мітки: верстат
Формула / Реферат:
Верстат, що містить станину з столом, рухомі повзун і платформу, встановлені на напрямних станини, робочий орган, шарнірно зв'язаний з рухомою платформою двома ланками, що утворюють паралелограмний поворотний механізм та шарнірно з'єднані між собою за допомогою штанги змінної довжини, який відрізняється тим, що рухомі повзун і платформа розташовані паралельно по різні боки столу, а робочий орган шарнірно з'єднано з штангою постійної...
Попередній патент: Установка валків стану холодної прокатки труб
Наступний патент: Тензометричний пристрій для вимірювання зусиль натягу в обв’язках
Випадковий патент: Спосіб одержання ферментного препарату пероксидази flammulina velutipes (curt.: fr.) sing.