Інтелектуальна сенсорна система
Номер патенту: 52080
Опубліковано: 10.08.2010
Автори: Кондратенко Володимир Юрійович, Кондратенко Юрій Пантелійович, Кондратенко Ніна Юріївна
Формула / Реферат
Інтелектуальна сенсорна система, що містить реєструвальний елемент, виконаний у вигляді чотирьох конденсаторів, та чутливий елемент, встановлений принаймні на одній з губок захватного пристрою робота, кожна з яких пов'язана із приводом їхнього переміщення, підключеним до комп'ютерної інформаційно-керуючої системи, чутливий елемент виконаний у вигляді стрижня з наконечником, розташованого у середині основного та додаткового пазів конічної форми, вершини конічних поверхонь яких співпадають і розташовані на подовжній осі стрижня, який пружно закріплений на губці в місці з'єднання основного й додаткового пазів, наконечник закріплений на контактному кінці стрижня й підпружинений до нього, контактну поверхню наконечника виконано з еластичного матеріалу, а обкладки конденсаторів розташовані на частині стрижня, що розміщена у додатковому пазу, та на внутрішній поверхні додаткового конічного паза відповідної губки, при цьому обкладки кожного конденсатора у відповідному каналі обробки сенсорної інформації підключено до послідовно з'єднаних: перетворювача "ємність-напруга", елемента затримки, першого суматора та першого порогового елемента, причому вихід перетворювача "ємність-напруга" одночасно підключено до другого інвертованого входу першого суматора, яка відрізняється тим, що до складу системи введено другий пороговий елемент в кожний канал обробки сенсорної інформації, другий суматор, прямий вхід якого з'єднаний з входами першого і другого порогових елементів першого каналу обробки сенсорної інформації, інвертований вхід - з входами першого і другого порогових елементів третього каналу обробки сенсорної інформації, а вихід - через третій пороговий елемент з входом першого елемента ЗАПЕРЕЧЕННЯ, третій суматор, прямий вхід якого з'єднаний з входами першого і другого порогових елементів другого каналу обробки сенсорної інформації, інвертований вхід -з входами першого і другого порогових елементів четвертого каналу обробки сенсорної інформації, а вихід - через четвертий пороговий елемент з входом другого елемента ЗАПЕРЕЧЕННЯ, і дванадцять елементів І, перший вхід першого елемента І підключений до виходу першого порогового елемента першого каналу обробки сенсорної інформації, другий вхід - до виходу другого порогового елемента третього каналу обробки сенсорної інформації, а вихід - до перших входів п'ятого, шостого і дванадцятого елементів І, перший і другий входи другого елемента І з'єднані відповідно з виходами другого порогового елемента першого каналу обробки сенсорної інформації і першого порогового елемента третього каналу обробки сенсорної інформації, а вихід - з першими входами восьмого, дев'ятого і десятого елементів І, перший і другий входи третього елемента І підключені відповідно до виходів першого порогового елемента другого каналу обробки сенсорної інформації і другого порогового елемента четвертого каналу обробки сенсорної інформації, а вихід - до других входів шостого, сьомого і восьмого елементів І, перший і другий входи четвертого елемента І з'єднані відповідно з виходами другого порогового елемента другого каналу обробки сенсорної інформації і першого порогового елемента четвертого каналу обробки сенсорної інформації, а вихід - з другими входами десятого, одинадцятого і дванадцятого елементів І, вихід першого елемента ЗАПЕРЕЧЕННЯ підключений до перших входів сьомого і одинадцятого елементів І, вихід другого елемента ЗАПЕРЕЧЕННЯ з'єднаний з другими входами п'ятого і дев'ятого елементів І, виходи п'ятого, шостого, сьомого, восьмого, дев'ятого, десятого, одинадцятого і дванадцятого елементів І підключені до відповідних входів комп'ютерної інформаційно-керуючої системи.
Текст
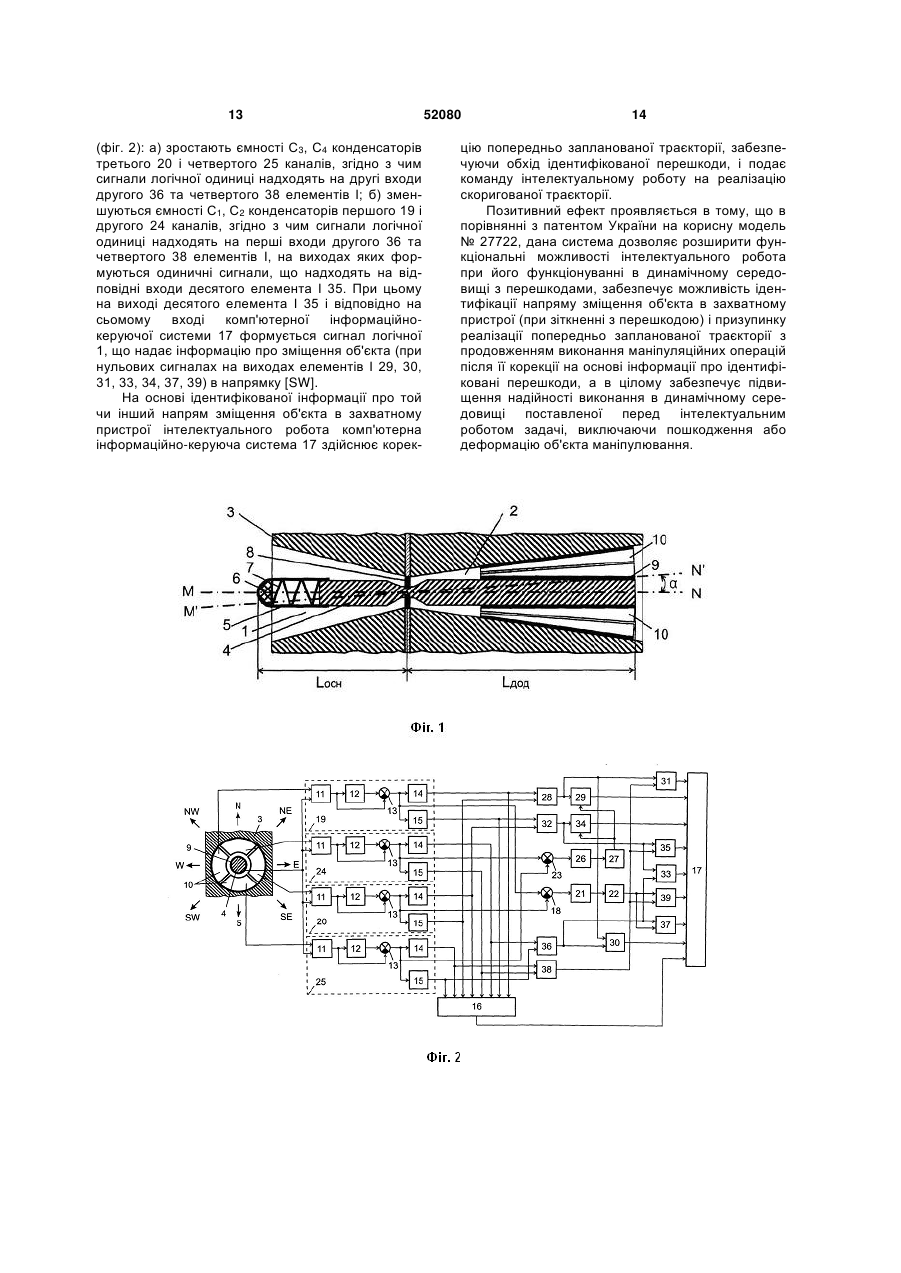
Інтелектуальна сенсорна система, що містить реєструвальний елемент, виконаний у вигляді чотирьох конденсаторів, та чутливий елемент, встановлений принаймні на одній з губок захватного пристрою робота, кожна з яких пов'язана із приводом їхнього переміщення, підключеним до комп'ютерної інформаційно-керуючої системи, чутливий елемент виконаний у вигляді стрижня з наконечником, розташованого у середині основного та додаткового пазів конічної форми, вершини конічних поверхонь яких співпадають і розташовані на подовжній осі стрижня, який пружно закріплений на губці в місці з'єднання основного й додаткового пазів, наконечник закріплений на контактному кінці стрижня й підпружинений до нього, контактну поверхню наконечника виконано з еластичного матеріалу, а обкладки конденсаторів розташовані на частині стрижня, що розміщена у додатковому пазу, та на внутрішній поверхні додаткового конічного паза відповідної губки, при цьому обкладки кожного конденсатора у відповідному каналі обробки сенсорної інформації підключено до послідовно з'єднаних: перетворювача "ємність-напруга", елемента затримки, першого суматора та першого порогового елемента, причому вихід перетворювача "ємність-напруга" одночасно підключено до другого інвертованого входу першого суматора, яка відрізняється тим, що до складу системи введено другий пороговий елемент в кожний канал обробки сенсорної інформації, другий суматор, прямий вхід якого з'єднаний з входами першого і другого порогових елементів першого каналу обробки сенсорної інформації, інвертований вхід - з входами першого і другого порогових елементів третього каналу обробки сенсорної інформації, а 2 (19) 1 3 Корисна модель належить до робототехніки й може бути використана в конструкціях та системах управління інтелектуальних роботів з чутливими захватними пристроями, що адаптують величину стискального зусилля до маси об'єкта маніпулювання та забезпечують визначення в автоматичному режимі напрямку зміщення об'єкта в захватному пристрої при його зіткненні з перешкодою в процесі реалізації інтелектуальним роботом запланованих траєкторій. Відомо про сенсорні пристрої і системи роботів, що в автоматичному режимі реєструють сигнали проковзування і забезпечують адаптацію величини стискального зусилля захватного пристрою до маси об'єкта маніпулювання на основі застосування датчиків проковзування, що безпосередньо контактують з об'єктом маніпулювання (деталлю). В цих пристроях реєструється переміщення рухливого елемента датчика, що відбувається внаслідок проковзування деталі в захватному пристрої робота. Прикладом такої сенсорної системи для реєстрації сигналу проковзування є система, що входить до складу захватного пристрою очуленого маніпулятора [а. с. СРСР № 1252168, В25J 19/02, опубл. Бюл. № 31, 1986]. Дана система містить реєструвальний елемент, виконаний у вигляді, принаймні, одного конденсатора, та чутливий елемент, встановлений, принаймні, на одній з губок захватного пристрою робота. Кожна з губок захватного пристрою пов'язана із приводом їхнього переміщення, підключеним до блоку керування. Чутливий елемент виконаний у вигляді стрижня з наконечником, розташованого усередині основного паза конічної форми. Наконечник закріплений на контактному кінці стрижня й підпружинений до нього. Контактну поверхню наконечника виконано з еластичного матеріалу. Стрижень пружно зв'язаний з губкою. Обкладинки конденсатора розташовані на стрижні та на внутрішній поверхні конічного паза відповідної губки захватного пристрою та підключені послідовно до вимірювального блоку, детектору й аналого-цифрового перетворювача (АЦП). Вихід АЦП підключено до блоку керування приводом губок захватного пристрою. Така сенсорна система, що реєструє сигнали проковзування, має наступні проблеми: - відсутність герметизації реєструвального елемента і його забруднення в процесі експлуатації, що приводить до погіршення параметрів реєструвального елемента, зокрема, його чутливості; - обмеження можливості зменшення розмірів паза, що контактує з об'єктом і зовнішнім середовищем, у зв'язку з необхідністю розміщення усередині паза реєструвального елемента і необхідністю забезпечення достатньої чутливості, що залежить від його габаритних розмірів; - обмеженість використання даного датчика в агресивних середовищах. Найбільш близьким аналогом є інтелектуальна сенсорна система з дискретним вихідним сигналом для реєстрації проковзування деталі в захватному пристрої маніпулятора [патент України на 52080 4 корисну модель № 27722, МКІ В25J 19/02, опубл. Бюл. № 18, 2007], що прийнята як прототип. Сенсорна система містить реєструвальний елемент, виконаний у вигляді чотирьох конденсаторів, та чутливий елемент, встановлений, принаймні, на одній з губок захватного пристрою робота. Кожна з губок пов'язана з приводом їхнього переміщення, підключеним до комп'ютерної інформаційнокеруючої системи. Чутливий елемент виконаний у вигляді стрижня з наконечником, розташованого у середині основного та додаткового пазів конічної форми, вершини конічних поверхонь яких співпадають і розташовані на подовжній осі стрижня, який пружно закріплений на губці в місці з'єднання основного й додаткового пазів. Наконечник закріплений на контактному кінці стрижня й підпружинений до нього, а контактну поверхню наконечника виконано з еластичного матеріалу. Обкладинки конденсаторів розташовані на частині стрижня, що розміщена у додатковому пазу, та на внутрішній поверхні додаткового конічного паза відповідної губки, при цьому обкладки кожного конденсатора у відповідному каналі обробки сенсорної інформації підключено до послідовно з'єднаних: перетворювача «ємність-напруга», елемента затримки, першого суматора та першого порогового елемента. Вихід перетворювача «ємність-напруга» підключено також до другого інвертованого входу першого суматора, а вихід першого порогового кожного каналу обробки сенсорної інформації підключено до відповідних входів комп'ютерної інформаційнокеруючої системи. Така сенсорна система з дискретним вихідним сигналом має наступні проблеми: - система забезпечує адаптацію стискального зусилля захватного пристрою інтелектуального робота до апріоно невідомої маси об'єкта маніпулювання, а також ідентифікацію моменту зміщення об'єкта в системі координат захватного пристрою при реалізації роботом запланованої траєкторії, зокрема, при збільшенні маси об'єкта в процесі виконання маніпуляційних операцій, у випадку ж випадкової появи на запланованій траєкторії переміщення об'єкта перешкоди, при зіткненні з якою може виникнути його зміщення, система не здатна ідентифікувати напрям такого зміщення об'єкта маніпулювання в системі координат захватного пристрою; - низька надійність системи, оскільки поява будь-якого проковзування об'єкта маніпулювання в системі координат захватного пристрою, в тому числі при збільшенні маси об'єкта або при його зіткненні з перешкодою, буде призводити до нарощування стискального зусилля без призупинення реалізації запланованої траєкторії, а у випадку зіткнення об'єкта з перешкодою таке нарощування стискального зусилля й продовження процесу реалізації запланованої траєкторії може стати причиною деформації (пошкодження) об'єкта маніпулювання або його випадання з губок захватного пристрою. В основу корисної моделі поставлено задачу удосконалення інтелектуальної сенсорної системи 5 для ідентифікації напрямку поковзування об'єкта в захватному пристрої робота шляхом зміни структури електронних каналів обробки інформації на основі аналізу сигналів проковзування, що дозволить розширити функціональні можливості системи та підвищити надійність виконання роботом маніпуляційних операцій з об'єктом в середовищі з перешкодами. Поставлена задача вирішується тим, що інтелектуальна сенсорна система, яка містить реєструвальний елемент, виконаний у вигляді чотирьох конденсаторів, та чутливий елемент, встановлений, принаймні, на одній з губок захватного пристрою робота, кожна з яких пов'язана із приводом їхнього переміщення, підключеним до комп'ютерної інформаційно-керуючої системи, чутливий елемент виконаний у вигляді стрижня з наконечником, розташованого у середині основного та додаткового пазів конічної форми, вершини конічних поверхонь яких співпадають і розташовані на подовжній осі стрижня, який пружно закріплений на губці в місці з'єднання основного й додаткового пазів, наконечник закріплений на контактному кінці стрижня й підпружинений до нього, контактну поверхню наконечника виконано з еластичного матеріалу, а обкладинки конденсаторів розташовані на частині стрижня, що розміщена у додатковому пазу, та на внутрішній поверхні додаткового конічного паза відповідної губки, при цьому обкладки кожного конденсатора у відповідному каналі обробки сенсорної інформації підключено до послідовно з'єднаних: перетворювача «ємність-напруга», елемента затримки, першого суматора та першого порогового елемента, причому вихід перетворювача «ємність-напруга» одночасно підключено до другого інвертованого входу першого суматора, згідно до пропозиції до складу системи введено другий пороговий елемент в кожний канал обробки сенсорної інформації, другий суматор, прямий вхід якого з'єднаний з входами першого і другого порогових елементів першого каналу обробки сенсорної інформації, інвертований вхід - з входами першого і другого порогових елементів третього каналу обробки сенсорної інформації, а. вихід через перший блок виділення модуля з входом третього порогового елемента, третій суматор, прямий вхід якого з'єднаний з входами першого і другого порогових елементів другого каналу обробки сенсорної інформації, інвертований вхід - з входами першого і другого порогових елементів четвертого каналу обробки сенсорної інформації, а вихід - через другий блок виділення модуля з входом четвертого порогового елемента, і дванадцять елементів І, перший вхід першого елемента І підключений до виходу першого порогового елемента першого каналу обробки сенсорної інформації, другий вхід - до виходу другого порогового елемента третього каналу обробки сенсорної інформації, а вихід - до перших входів п'ятого, шостого і дванадцятого елементів І, перший і другий входи другого елемента І з'єднані відповідно з виходами другого порогового елемента першого каналу обробки сенсорної інформації і першого порогового елемента третього каналу обробки сенсорної інформації, а вихід - з першими входами 52080 6 восьмого, дев'ятого і десятого елементів І, перший і другий входи третього елемента І підключені відповідно до виходів першого порогового елемента другого каналу обробки сенсорної інформації і другого порогового елемента четвертого каналу обробки сенсорної інформації, а вихід - до других входів шостого, сьомого і восьмого елементів І, перший і другий входи четвертого елемента з'єднані відповідно з виходами другого порогового елемента другого каналу обробки сенсорної інформації і першого порогового елемента четвертого каналу обробки сенсорної інформації, а вихід - з другими входами десятого, одинадцятого і дванадцятого елементів І, вихід третього порогового елемента підключений до перших входів сьомого і одинадцятого елементів І, вихід четвертого порогового елемента з'єднаний з другими входами п'ятого і дев'ятого елементів І, виходи п'ятого, шостого, сьомого, восьмого, дев'ятого, десятого, одинадцятого і дванадцятого елементів І підключені до відповідних входів комп'ютерної інформаційно-керуючої системи. Винахідницький задум полягає в тому, що запропонована структура каналів обробки інформації дозволяє на основі тактильної інформації про проковзування об'єкта в будь-якому напрямку, яка формується розподіленою системою сенсорних елементів, та на основі використання інтелектуальної бази продукційних правил формувати дискретні сигнали на відповідних входах комп'ютерної інформаційно-керуючої системи, які визначають напрямок зміщення об'єкта в системі координат захватного пристрою. Це дасть змогу комп'ютерній інформаційно-керуючій системі призупинити процес виконання маніпуляційних операцій при зіткненні з перешкодою, проаналізувати параметри перешкоди та скоригувати траєкторію переміщення об'єкта. На фіг. 1 представлено схему конструктивного виконання сенсорної системи для реєстрації проковзування об'єкта в захватному пристрої інтелектуального робота у поздовжньому розрізі, а на фіг. 2 - у поперечному розрізі, з каналами обробки інформації та електронними блоками, що реалізують інтелектуальну базу продукційних правил для ідентифікації напрямку зміщення об'єкта в захватному пристрої (при його зіткненні з перешкодою). Первинні перетворювачі тактильної інформації інтелектуальної сенсорної системи розміщуються принаймні на одній з губок захватного пристрою. В основному 1 і додатковому 2 пазах конічної форми, виконаних у губці 3 захватного пристрою, розташовано стрижень 4. На одному кінці стрижня 4 розміщено наконечник 5, що безпосередньо контактує з деталлю. Робоча поверхня 6 наконечника 5 виконана з еластичного матеріалу, а сам наконечник 5 з'єднаний зі стрижнем 4 за допомогою пружини 7. За допомогою пружного елемента 8 стрижень 4 закріплений на губці 3 захватного пристрою. У додатковому пазу 2 розташований реєструвальний елемент, що складається з розподілених по конічній поверхні додаткового паза 2 чотирьох конденсаторів. Одна обкладинка кожного конденсатора 9, розташована на поверхні стрижня 4, а друга обкладинки 7 10 розміщена на внутрішній поверхні паза 2 (фіг. 2). Кожний конденсатор реєструвального елемента з'єднаний з відповідним каналом обробки сенсорної інформації, зокрема в кожному каналі обкладинки 9, 10 відповідного конденсатора підключені до перетворювача «ємність-напруга» 11, вихід якого поєднано з входом елемента затримки 12 та з інвертованим (від'ємним) входом суматора 13. Вихід елемента затримки 12 підключено до прямого (додатного) входу суматора 13. Вихід відповідного суматора 13 поєднано з входами першого 14 і другого 15 порогових елементів, виходи яких є виходами відповідного каналу обробки сенсорної інформації, що підключені через багатовходовий елемент АБО 16 до першого входу комп'ютерної інформаційно-керуючої системи 17, перший вихід якої з'єднаний з приводом керування губками захватного пристрою. До складу інтелектуальної сенсорної системи входить також інтелектуальний блок формування сигналів, відповідних напрямку {N,NE,E,SE,S,SW,W,NW} зміщення об'єкта в захватному пристрої (при його зіткненні з перешкодою), що містить дванадцять елементів І, другий суматор 18, прямий вхід якого з'єднаний з входами першого 14 і другого 15 порогових елементів першого каналу обробки сенсорної інформації 19, інвертований вхід - з входами першого 14 і другого 15 порогових елементів третього каналу обробки сенсорної інформації 20, а вихід - через третій пороговий елемент 21 з входом першого елемента ЗАПЕРЕЧЕННЯ 22 та третій суматор 23, прямий вхід якого з'єднаний з входами першого 14 і другого 15 порогових елементів другого каналу обробки сенсорної інформації 24, інвертований вхід - з входами першого 14 і другого 15 порогових елементів четвертого каналу обробки сенсорної інформації 25, а вихід - через четвертий пороговий елемент 26 з входом другого елемента ЗАПЕРЕЧЕННЯ 27. Перший вхід першого елемента І 28 підключений до виходу першого порогового елемента 14 першого каналу обробки сенсорної інформації 19, другий вхід - до виходу другого порогового елемента 15 третього каналу обробки сенсорної інформації 20, а вихід - до перших входів п'ятого 29, шостого 30 і дванадцятого елементів І 31. Перший і другий входи другого елемента І 32 з'єднані відповідно з виходами другого порогового елемента 15 першого каналу обробки сенсорної інформації 19 і першого порогового елемента 14 третього каналу обробки сенсорної інформації 20, а вихід - з першими входами восьмого 33, дев'ятого 34 і десятого 35 елементів І. Перший і другий входи третього елемента І 36 підключені відповідно до виходів першого порогового елемента 14 другого каналу обробки сенсорної інформації 24 і другого порогового елемента 15 четвертого каналу обробки сенсорної інформації 25, а вихід до других входів шостого 30, сьомого 37 і восьмого 33 елементів І. Перший і другий входи четвертого елемента І 38 з'єднані відповідно з виходами другого порогового елемента 15 другого каналу обробки сенсорної інформації 24 і першого порогового елемента 14 четвертого каналу обробки сенсорної інформації 25, а вихід - з другими входами десято 52080 8 го 35, одинадцятого 39 і дванадцятого 31 елементів І. Вихід першого елемента ЗАПЕРЕЧЕННЯ 22 підключений до перших входів сьомого 37 і одинадцятого 39 елементів І. Вихід другого елемента ЗАПЕРЕЧЕННЯ 27 з'єднаний з другими входами п'ятого 29 і дев'ятого 34 елементів І. Виходи п'ятого 29, шостого 30, сьомого 37, восьмого 33, дев'ятого 34, десятого 35, одинадцятого 39 і дванадцятого 31 елементів І підключені відповідно до другого, третього, четвертого, п'ятого, шостого, сьомого, восьмого і дев'ятого входів комп'ютерної інформаційно-керуючої системи 17. В якості перетворювача «ємність-напруга» 11 може бути використаний стандартний перетворювач типу ХЕ2004 фірми Xemics або стандартні апаратні та програмно-апаратні схеми перетворювання ємності в напругу. Елемент затримки 12 реалізується стандартними електронними схемами або на базі мікроконтролерів (наприклад, фірми Microchip, Atmel та ін.). Елементи І, АБО, порогові елементи та блоки виділення модуля є типовими електронними блоками, що використовуються в обчислювальній техніці. При співвідношенні довжин частин стрижня в основному й додатковому L 1 пазах, наприклад, осн , збільшується площа L дод 5 поверхні, на якій розміщено обкладинки конденсаторів реєструвального елемента, а відповідно підвищується чутливість сенсорної системи. Запропонована інтелектуальна сенсорна система працює наступним чином. У початковому стані наконечник 5 за допомогою пружини 7 утримується над поверхнею губки 3, а пружний елемент 8 утримує стрижень 4 у такому положенні, що його поздовжня вісь перпендикулярна поверхні губки й збігається з віссю MN стрижня 4. При захоплюванні об'єкта маніпулювання його поверхня приходить у зіткнення з наконечником 5, пружина 7 стискується й наконечник 5 занурюється в пазу 2. Величина стискального зусилля при цьому відповідає попередньо визначеному мінімальному значенню Fmin, що виключає деформацію або пошкодження об'єкта. Якщо при спробному русі робота об'єкт починає проковзувати в захватному пристрої при невідповідності величини стискального зусилля масі деталі, то внаслідок сил тертя між поверхнею об'єкта й робочою поверхнею 6 наконечника 5 стрижень 4 відхиляється по ходу проковзування деталі на кут . При цьому поздовжня вісь стрижня 4 співпадає з віссю M'N'. Взаємне переміщення обкладинок 9 та 10 одна відносно іншої у всіх конденсаторах реєструвального елемента призводить до зніми величин отриманих ємностей, зокрема, в залежності від напряму та величини переміщення стрижня 4 змінюються значення ємностей C1, C2, C3 та С4 між обкладинками 9 та 10 конденсаторів (фіг. 1, 2). При зміні значень ємностей змінюються величини напруги на виходах відповідних перетворювачів «ємність-напруга» 11 всіх каналів обробки сенсорної інформації. При цьому в кожному каналі обробки сенсорної інформації попереднє значення напруги, що зберігається елементом затримки 12 і відповідає значенню ємності перед спробним ру 9 хом робота, порівнюється за допомогою суматора 13 з поточним значенням напруги, що відповідає значенню ємності після спробного руху робота. Отже, якщо сигнал на виході суматора 13 відрізняється від нуля, то це означає, що ємність відповідного конденсатора змінилась внаслідок проковзування деталі в захватному пристрої. При цьому сигнал з виходу суматора 13 відповідного каналу обробки сенсорної інформації надходить до входів першого порогового елемента 14 з статичною характеристикою 0, при Uвих13 0 Uвих14 1 при Uвих13 0 , і другого порогового елемента 15 з статичною характеристикою 0, при Uвих13 0 Uвих15 1 при Uвих13 0 , на виході одного з яких в залежності від характеру зміни (збільшення або зменшення) ємності відповідного конденсатора формується дискретний сигнал (логічна 1), що відповідає наявності проковзування. Зокрема, при збільшенні ємності відповідного конденсатора дискретний сигнал Uвuх14=1 формується на виході першого порогового елемента 14, а при зменшенні - дискретний сигнал Uвuх15=1 формується на виході другого порогового елемента 15. Так як виходи першого 14 і другого 15 порогових елементів всіх каналів обробки сенсорної інформації підключені через багатовходовий елемент АБО 16 до першого входу комп'ютерної інформаційно-керуючої системи 17, перший вихід якої з'єднаний з приводом керування губками захватного пристрою, то в такому випадку за допомогою привода губок збільшується стискальне зусилля на наперед задану дискретну величину F і робот здійснює наступний спробний рух. Якщо після відповідного спробного руху сигнали на виходах суматорів 13 дорівнюють нулю, то це означає, що в порівнянні з попереднім спробним рухом ємність конденсаторів залишилась незмінною і проковзування об'єкта в захватному пристрої не відбувалося, а на виході елемента АБО 16 формується дискретний сигнал (логічний 0), що відповідає відсутності проковзування. При цьому на виходах порогових елементів 14, 15 всіх каналів 19, 20, 24, 25 обробки сенсорної інформації, на виходах суматорів 18, 23, на виході третього порогового елемента 21 з статичною характеристикою 0, при Uвих18 0 , Uвих 21 1 при Uвих18 0 , на виході четвертого порогового елемента 26 з статичною характеристикою 0, при Uвих 23 0 Uвих 26 1 при Uвих 23 0 , І на виходах елементів І 28, 29, 30, 31, 32, 33, 34, 35, 36, 37, 38, 39 встановлюються сигнали логічного нуля, а на виходах елементів ЗАПЕРЕЧЕННЯ 22, 27 - сигнали логічної одиниці. На даний момент (t0) величина стискального зусилля F буде відповідати масі об'єкта (наперед невідомій), що реєструється комп'ютерною інформаційно 52080 10 керуючою системою 17 і дає можливість інтелектуальному роботу здійснювати в подальшому відповідні маніпуляційні операції з об'єктом. При переміщенні об'єкта маніпулювання в динамічному середовищі за попередньо запланованою траєкторією захватний пристрій у відповідний момент часу (t1) може зіткнутися з перешкодою, яка в динамічній робочій зоні інтелектуального робота може виникати випадковим чином. При цьому, якщо величини стискального зусилля F недостатньо для надійної фіксації об'єкта при його зіткненні з перешкодою, то виникає зміщення об'єкта в захватному пристрої. Напрям {N,NE,E,SE,S,SW,W,NW} цього зміщення при реалізації запланованої траєкторії залежить від місцерозташування перешкоди. При зміщенні об'єкта буде змінюватись положення чутливого елемента 5 (фіг. 1, 2) відносно захватного пристрою, а відповідно і ємність конденсаторів реєструвального елемента, згідно з чим на виходах першого 14 або другого 15 порогових елементів кожного каналу обробки сенсорної інформації відповідно сформуються нові значення сигналів Uвuх14(t1)=1, Uвuх15(t1)=0 (при збільшенні ємності відповідного конденсатора) або Uвuх15(t1)=1, Uвuх14(t1)=0 (при зменшенні ємності відповідного конденсатора). При цьому на виході елемента АБО 16 встановлюється сигнал логічної 1, згідно з яким комп'ютерна інформаційнокеруюча система призупиняє процес реалізації запланованої траєкторії. Одночасно на виході одного з елементів І 29, 30, 31, 33, 34, 35, 37, 39, підключених до відповідних входів комп'ютерної інформаційно-керуючої системи, з'являється також сигнал логічної одиниці, що відповідає одному з напрямків {N,NE,E,SE,S,SW,W,NW} зміщення об'єкта в захватному пристрої. Розглянемо почергово ідентифікацію інтелектуальною сенсорною системою різних напрямків зміщення об'єкта в захватному пристрої при його зіткненні з перешкодою. Зокрема, при зміщенні об'єкта в напрямку {N} (фіг. 2): а) зростає ємність С1 конденсатора першого каналу 19, згідно з чим на виході відповідного першого порогового елемента 14 встановлюється сигнал логічної одиниці, який надходить на перший вхід першого елемента І 28; б) зменшується ємність С3 конденсатора третього каналу 20, згідно з чим на виході відповідного другого порогового елемента 15 встановлюється сигнал логічної одиниці, який надходить на другий вхід першого елемента І 28, на виході якого формується одиничний сигнал, що надходить на перший вхід п'ятого елемента І 29; в) ємності С2,С4 другого 24 і четвертого 25 каналів обробки сенсорної інформації будуть еквівалентними, тобто С2=С4, а отже на виходах третього суматора 23 і четвертого порогового елемента 26 має місце нульовий сигнал, а на виході другого елемента ЗАПЕРЕЧЕННЯ 27 - сигнал логічної 1, що надходить до другого входу п'ятого елемента І 29. При цьому на виході п'ятого елемента І 29 і відповідно на другому вході комп'ютерної інформаційно-керуючої системи 17 формується сигнал логічної 1, що надає інформацію про зміщення об'єкта (при нульових сигналах на виходах елементів І 30, 31, 33, 34, 11 35, 37, 39) в напрямку {N}. У випадку зміщення об'єкта в напрямку {Е} (фіг. 2): а) зростає ємність С2 конденсатора другого каналу 24, згідно з чим на виході відповідного першого порогового елемента 14 встановлюється сигнал логічної одиниці, який надходить на перший вхід третього елемента І 36; б) зменшується ємність С4 конденсатора четвертого каналу 25, згідно з чим на виході відповідного другого порогового елемента 15 встановлюється сигнал логічної 1, який надходить на другий вхід третього елемента І 36, на виході якого формується одиничний сигнал, що надходить на другий вхід сьомого елемента І 37; в) ємності С1, С3 першого 19 і третього 20 каналів будуть еквівалентними, тобто С1= С3, а отже на виходах другого суматора 18 і третього порогового елемента 21 має місце нульовий сигнал, а на виході першого елемента ЗАПЕРЕЧЕННЯ 22 - сигнал логічної 1, що надходить до першого входу сьомого елемента І 37. При цьому на виході сьомого елемента І 37 і відповідно на четвертому вході комп'ютерної інформаційнокеруючої системи 17 формується сигнал логічної 1, що надає інформацію про зміщення об'єкта (при нульових сигналах на виходах елементів І 29, 30, 31, 33, 34, 35, 39) в напрямку {Е}. При зміщенні об'єкта в напрямку {S} (фіг. 2): а) зменшується ємність С1 конденсатора першого каналу 19, згідно з чим на виході відповідного другого порогового елемента 15 встановлюється сигнал логічної одиниці, який надходить на перший вхід другого елемента І 32; б) зростає ємність С3 конденсатора третього каналу 20, згідно з чим на виході відповідного першого порогового елемента 14 встановлюється сигнал логічної 1, який надходить на другий вхід другого елемента І 32, на виході якого формується одиничний сигнал, що надходить на перший вхід дев'ятого елемента І 34; в) ємності С2, С4 другого 24 і четвертого 25 каналів обробки сенсорної інформації будуть еквівалентними, тобто С2=С4, а отже на виходах третього суматора 23 і четвертого порогового елемента 26 має місце нульовий сигнал, а на виході другого елемента ЗАПЕРЕЧЕННЯ 27 - сигнал логічної 1, що надходить до другого входу дев'ятого елемента І 34. При цьому на виході дев'ятого елемента І 34 і відповідно на шостому вході комп'ютерної інформаційно-керуючої системи 17 формується сигнал логічної 1, що надає інформацію про зміщення об'єкта (при нульових сигналах на виходах елементів І 29, 30, 31, 33, 35, 37, 39) в напрямку {S}. У випадку зміщення об'єкта в напрямку{W} (фіг. 2): а) зменшується ємність С2 конденсатора другого каналу 24, згідно з чим на виході відповідного другого порогового елемента 15 встановлюється сигнал логічної 1, який надходить на перший вхід четвертого елемента І 38; б) зростає ємність С4 конденсатора четвертого каналу 25, згідно з чим на виході відповідного першого порогового елемента 14 встановлюється сигнал логічної 1, який надходить на другий вхід четвертого елемента І 38, на виході якого формується одиничний сигнал, що надходить на другий вхід одинадцятого елемента І 39; в) ємності С1, С3 першого 19 і третього 20 каналів будуть еквівалентними, тобто 52080 12 С1=С3, а отже на виходах другого суматора 18 і третього порогового елемента 21 має місце нульовий сигнал, а на виході першого елемента ЗАПЕРЕЧЕННЯ 22 - сигнал логічної 1, що надходить до першого входу одинадцятого елемента І 39. При цьому на виході одинадцятого елемента І 39 і відповідно на восьмому вході комп'ютерної інформаційно-керуючої системи 17 формується сигнал логічної 1, що надає інформацію про зміщення об'єкта (при нульових сигналах на виходах елементів І 29, 30, 31, 33, 34, 35, 37) в напрямку {W}. При зміщенні об'єкта в напрямку {NE} (фіг. 2): а) зростають ємності С1, С2 конденсаторів першого 19 і другого 24 каналів, згідно з чим сигнали логічної одиниці надходять на перші входи першого елемента І 28 та третього елемента І 36; б) зменшуються ємності С3, С4 конденсаторів третього 20 і четвертого 25 каналів, згідно з чим сигнали логічної одиниці надходять на другі входи першого елемента І 28 та третього елемента І 36, на виходах яких формуються одиничні сигнали, що надходять на відповідні входи шостого елемента І 30. При цьому на виході шостого елемента І 30 і відповідно на третьому вході комп'ютерної інформаційно-керуючої системи 17 формується сигнал логічної 1, що надає інформацію про зміщення об'єкта (при нульових сигналах на виходах елементів І 29, 31, 33, 34, 35, 37, 39) в напрямку {NE}. У випадку зміщення об'єкта в напрямку {NW} (фіг. 2): а) зростають ємності С1, С4 конденсаторів першого 19 і четвертого 25 каналів, згідно з чим сигнали логічної одиниці надходять на перший вхід першого елемента І 28 та другий вхід четвертого елемента І 38; б) зменшуються ємності С2, С3 конденсаторів другого 24 і третього 20 каналів, згідно з чим сигнали логічної одиниці надходять на перший вхід четвертого елемента І 38 і другий вхід першого елемента І 28, на виходах яких формуються одиничні сигнали, що надходять на відповідні входи дванадцятого елемента І. При цьому на виході дванадцятого елемента І 31 і відповідно на дев'ятому вході комп'ютерної інформаційнокеруючої системи 17 формується сигнал логічної 1, що надає інформацію про зміщення об'єкта (при нульових сигналах на виходах елементів І 29, 30, 33, 34, 35, 37, 39) в напрямку {NW}. При зміщенні об'єкта в напрямку {SE} (фіг. 2): а) зростають ємності С3, С2 конденсаторів третього 20 і другого 24 каналів, згідно з чим сигнали логічної одиниці надходять на другий вхід другого елемента І 32 та перший вхід третього елемента І 36; б) зменшуються ємності С1, С4 конденсаторів першого 19 і четвертого 25 каналів, згідно з чим сигнали логічної одиниці надходять на перший вхід другого елемента І 32 та на другий вхід третього елемента І 36, на виходах яких формуються одиничні сигнали, що надходять на відповідні входи восьмого елемента І 33. При цьому на виході восьмого елемента І 33 і відповідно на п'ятому вході комп'ютерної інформаційно-керуючої системи 17 формується сигнал логічної 1, що надає інформацію про зміщення об'єкта (при нульових сигналах на виходах елементів І 29, 30, 31, 34, 35, 37, 39) в напрямку {SE}. У випадку зміщення об'єкта в напрямку {SW} 13 (фіг. 2): а) зростають ємності С3, С4 конденсаторів третього 20 і четвертого 25 каналів, згідно з чим сигнали логічної одиниці надходять на другі входи другого 36 та четвертого 38 елементів І; б) зменшуються ємності С1, С2 конденсаторів першого 19 і другого 24 каналів, згідно з чим сигнали логічної одиниці надходять на перші входи другого 36 та четвертого 38 елементів І, на виходах яких формуються одиничні сигнали, що надходять на відповідні входи десятого елемента І 35. При цьому на виході десятого елемента І 35 і відповідно на сьомому вході комп'ютерної інформаційнокеруючої системи 17 формується сигнал логічної 1, що надає інформацію про зміщення об'єкта (при нульових сигналах на виходах елементів І 29, 30, 31, 33, 34, 37, 39) в напрямку [SW]. На основі ідентифікованої інформації про той чи інший напрям зміщення об'єкта в захватному пристрої інтелектуального робота комп'ютерна інформаційно-керуюча система 17 здійснює корек 52080 14 цію попередньо запланованої траєкторії, забезпечуючи обхід ідентифікованої перешкоди, і подає команду інтелектуальному роботу на реалізацію скоригованої траєкторії. Позитивний ефект проявляється в тому, що в порівнянні з патентом України на корисну модель № 27722, дана система дозволяє розширити функціональні можливості інтелектуального робота при його функціонуванні в динамічному середовищі з перешкодами, забезпечує можливість ідентифікації напряму зміщення об'єкта в захватному пристрої (при зіткненні з перешкодою) і призупинку реалізації попередньо запланованої траєкторії з продовженням виконання маніпуляційних операцій після її корекції на основі інформації про ідентифіковані перешкоди, а в цілому забезпечує підвищення надійності виконання в динамічному середовищі поставленої перед інтелектуальним роботом задачі, виключаючи пошкодження або деформацію об'єкта маніпулювання. 15 Комп’ютерна верстка А. Крулевський 52080 Підписне 16 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюIntelligent sensor system
Автори англійськоюKondratenko Yurii Panteliiovych, Kondratenko Nina Yuriivna, Kondratenko Volodymyr Yuriiovych
Назва патенту російськоюИнтеллектуальная сенсорная система
Автори російськоюКондратенко Юрий Пантелеевич, Кондратенко Нина Юриевна, Кондратенко Владимир Юрьевич
МПК / Мітки
МПК: B25J 19/02
Мітки: інтелектуальна, система, сенсорна
Код посилання
<a href="https://ua.patents.su/8-52080-intelektualna-sensorna-sistema.html" target="_blank" rel="follow" title="База патентів України">Інтелектуальна сенсорна система</a>
Інтелектуальна система тренажерного навчання геодезичним вимірам
Номер патенту: 46414
Опубліковано: 25.12.2009
Автори: Бурачек Всеволод Германович, Зацерковний Віталій Іванович, Коледа Олеся Дмитрівна, Хомушко Дмитро Валерійович, Параніч Віктор Петрович
МПК: G01C 15/00, G09B 19/00
Мітки: система, вимірам, навчання, інтелектуальна, геодезичним, тренажерного
Формула / Реферат:
Інтелектуальна система тренажерного навчання геодезичним вимірам, яка містить імітатор візуальної візирної картини (ІВВК), обчислювальні засоби, що містять у собі блок введення даних (БВД), блоки перетворення інформації і програм, блоки аналізу інформації, блок навчальних коментарів (БНК) та інформаційний дисплей, яка відрізняється тим, що містить блок вибору виду та класу вимірів (БВВКВ), блок випадкового вибору варіанта програми вимірів...
Відмовостійка система з аналізом ресурсу
Номер патенту: 36473
Опубліковано: 27.10.2008
Автор: Кулік Анатолій Степанович
МПК: G06F 11/18
Мітки: система, аналізом, ресурсу, відмовостійка
Формула / Реферат:
Відмовостійка система з аналізом ресурсу, яка має блоки, що резервуються, елементи нерівнозначність, елементи І, пороговий елемент, вихід системи, перший і другий двійковий лічильники, перший і другий елементи АБО, n детекторів фронту, n детекторів спаду, виходи індикації технічного стану, арифметичний пристрій, дві групи інформаційних виходів, причому вихід і-го блока, що резервується, з'єднаний з першим входом і-го елемента І, вихід і-го...
Відмовостійка система з аналізом ресурсу
Номер патенту: 15201
Опубліковано: 15.06.2006
Автори: Кулік Тамара Васильовна, Дергачов Володимир Андрійович, Кулік Анатолій Степанович
МПК: G06F 11/18
Мітки: відмовостійка, ресурсу, аналізом, система
Формула / Реферат:
Відмовостійка система з аналізом ресурсу, яка має блоки, що резервуються, елементи нерівнозначності, елементи І, пороговий елемент, вихід системи, перший двійковий лічильник, перший і другий елементи АБО, n детекторів фронту, n детекторів спаду, виходи індикації технічного стану, причому вихід і-го блока, що резервується, з'єднаний з першим входом і-го елемента I, вихід і-го елемента нерівнозначності з'єднаний з другим входом і-го елемента І,...
Відмовостійка система з аналізом ресурсу
Номер патенту: 80664
Опубліковано: 10.10.2007
Автори: Кулік Анатолій Степанович, Дергачов Володимир Андрійович, Кулік Тамара Васильовна
МПК: G06F 11/18
Мітки: відмовостійка, аналізом, система, ресурсу
Формула / Реферат:
Відмовостійка система з аналізом ресурсу, яка має блоки, що резервуються, елементи НЕРІВНОЗНАЧНІСТЬ, елементи І, пороговий елемент, вихід системи, двійковий лічильник, перший і другий елементи АБО, виходи індикації технічного стану об'єкта, n детекторів фронту, n детекторів спаду, причому вихід і-го блока, що резервується, з'єднаний з першим входом і-го елемента І, вихід і-го елемента НЕРІВНОЗНАЧНІСТЬ з'єднаний з другим входом і -го елемента...
Адаптивна резервована система
Номер патенту: 51152
Опубліковано: 15.11.2002
Автори: Дергачов Володимир Андрійович, Кулік Анатолій Степанович, Доценко Наталія Володимирівна
МПК: G06F 11/18
Мітки: резервована, система, адаптивна
Формула / Реферат:
Адаптивна резервована система, яка має блоки, що резервуються, елементи нерівнозначності, елементи І, пороговий елемент, вихід системи, двійковий лічильник, перший і другий елементи АБО, причому вихід і -го блока, що резервується з'єднаний з першим входом і-го елемента І, вихід і-го елемента нерівнозначності з'єднаний з другим входом і-го елемента І, вихід якого з'єднаний з і-им входом першої групи входів порогового елемента, вихід порогового...
Попередній патент: Лікарський протиепілептичний препарат леветирацетаму у формі таблеток
Наступний патент: Теплообмінний елемент
Випадковий патент: Спосіб формування сечоприймача