Спосіб вимірювання інерційних та гравітаційних прискорень балістичних ракет
Формула / Реферат
Спосіб вимірювання інерційних та гравітаційних прискорень балістичних ракет шляхом порівняння переміщення інерційного тіла з переміщенням, пропорційним сигналу на виході акселерометра, перетворення результуючого переміщення в електричний сигнал і підсилювання цього сигналу, який відрізняється тим, що діюче прискорення прикладають до першого та другого акселерометрів, переміщення чутливого елемента першого акселерометра алгебраїчно складають з переміщенням, пропорційним сигналу на виході другого акселерометра, і формують переміщення пропорційно отриманій сумі, переміщення чутливого елемента другого акселерометра порівнюють з переміщенням, пропорційним сигналу на виході першого акселерометра і формують переміщення пропорційно отриманій різниці, вимірюють сигнали на виходах першого та другого акселерометрів, кути тангажа, рискання і обертання, а шукані інерційне та гравітаційне прискорення відносно осей чутливості х, у і z визначають згідно з рівняннями
![]()
![]()
![]()
![]()
![]()
![]()
де ax(t), ay(t) і az(t) - інерційні прискорення відносно осей х, у і z; gx(t), gy(t) і gz(t) - гравітаційні прискорення відносно осей х, у і z; V1x(t) і V2x(t), V1y(t) і V2y(t), V1z(t) і V2z(t) - відповідно сигнали на виходах 1-го та 2-го акселерометрів відносно осей х, у і z; ![]() кути тангажа, рискання та обертання, А1 і А2, С1 і C2, E1 і E2 - відповідно коефіцієнти пропорційності за інерційним прискоренням 1-го і 2-го каналів вимірювання відносно осей х, у і z; В1 і В2, D1 і D2, F1 і F2 – відповідно коефіцієнти пропорційності 1-го та 2-го каналів вимірювання відносно осей х, у і z.
кути тангажа, рискання та обертання, А1 і А2, С1 і C2, E1 і E2 - відповідно коефіцієнти пропорційності за інерційним прискоренням 1-го і 2-го каналів вимірювання відносно осей х, у і z; В1 і В2, D1 і D2, F1 і F2 – відповідно коефіцієнти пропорційності 1-го та 2-го каналів вимірювання відносно осей х, у і z.
Текст
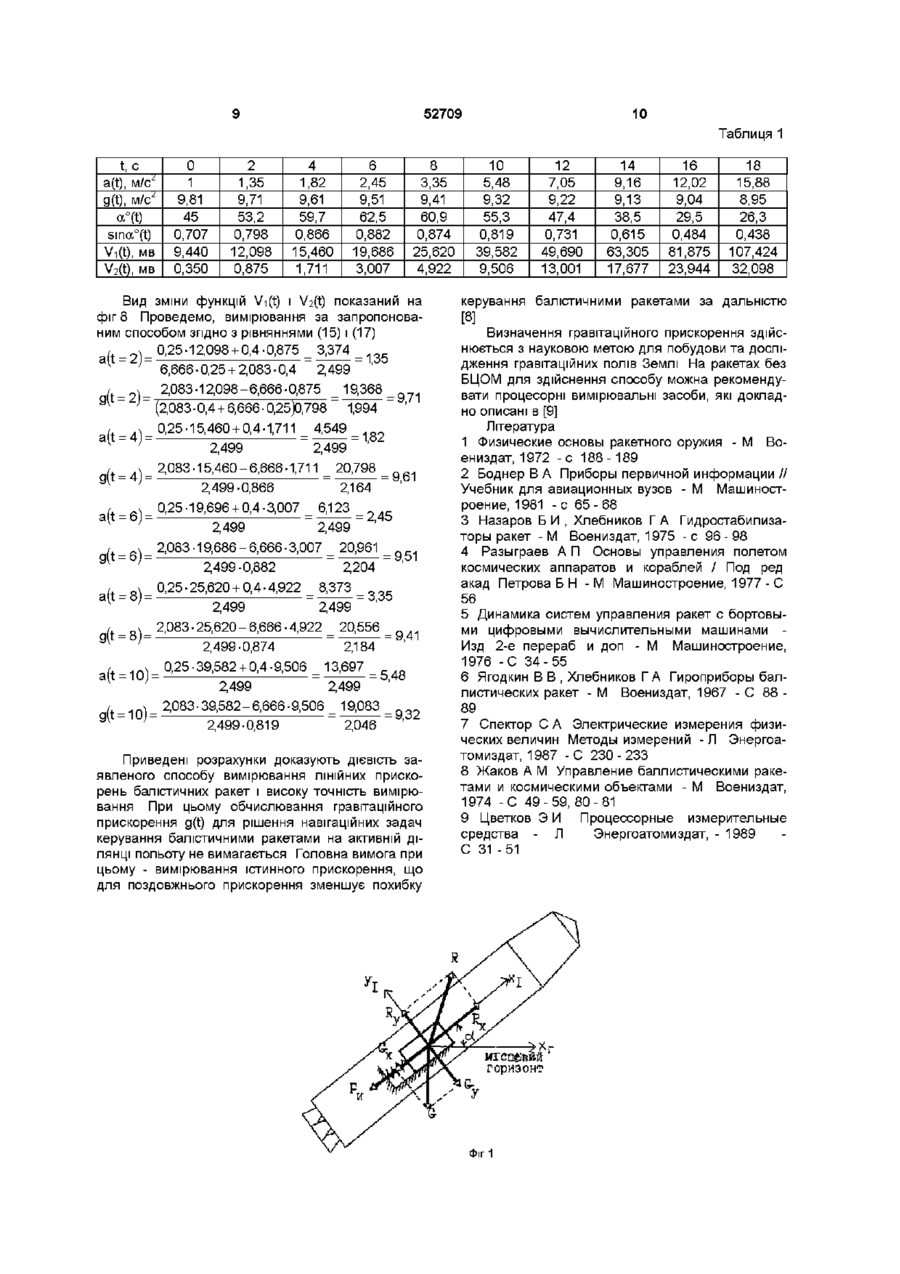
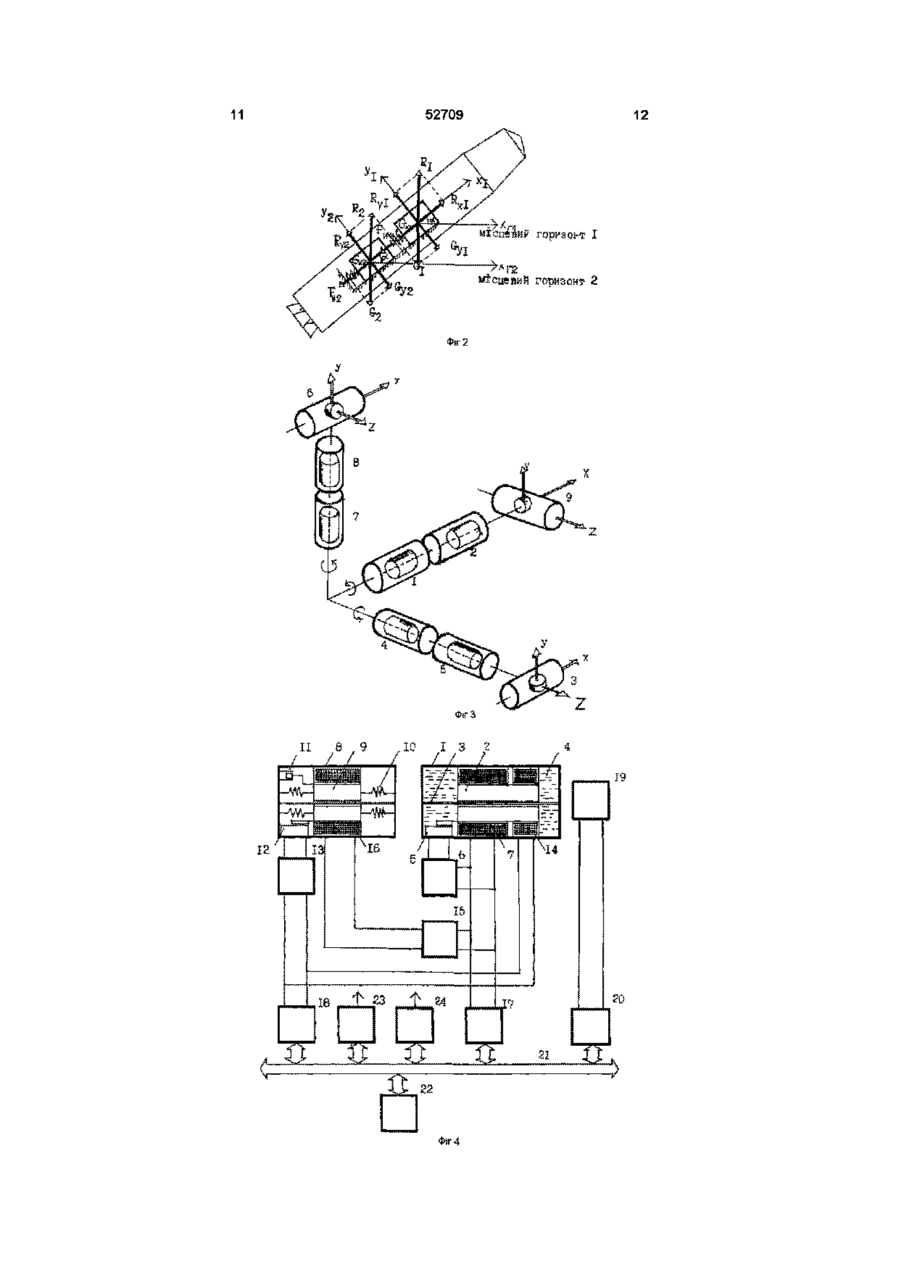
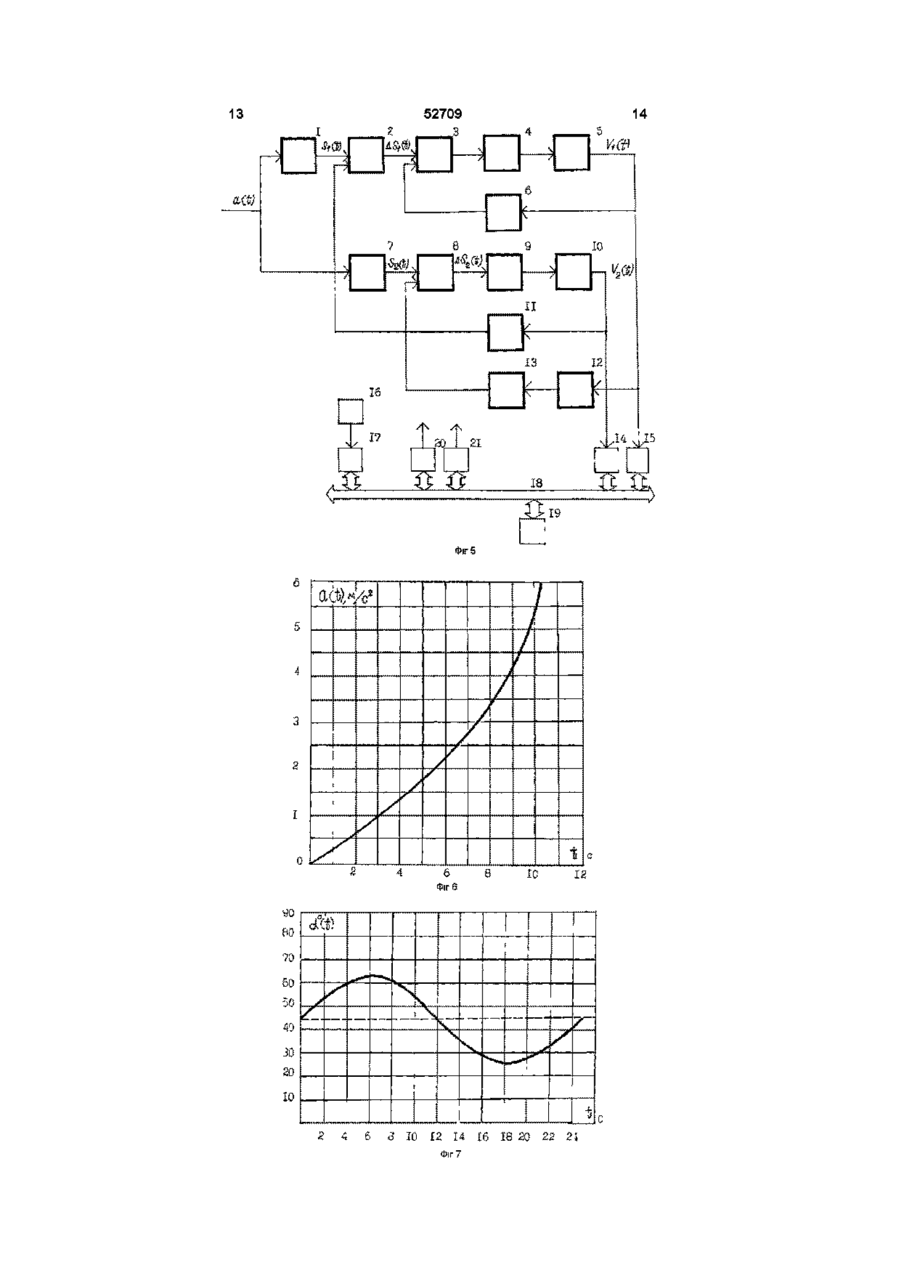
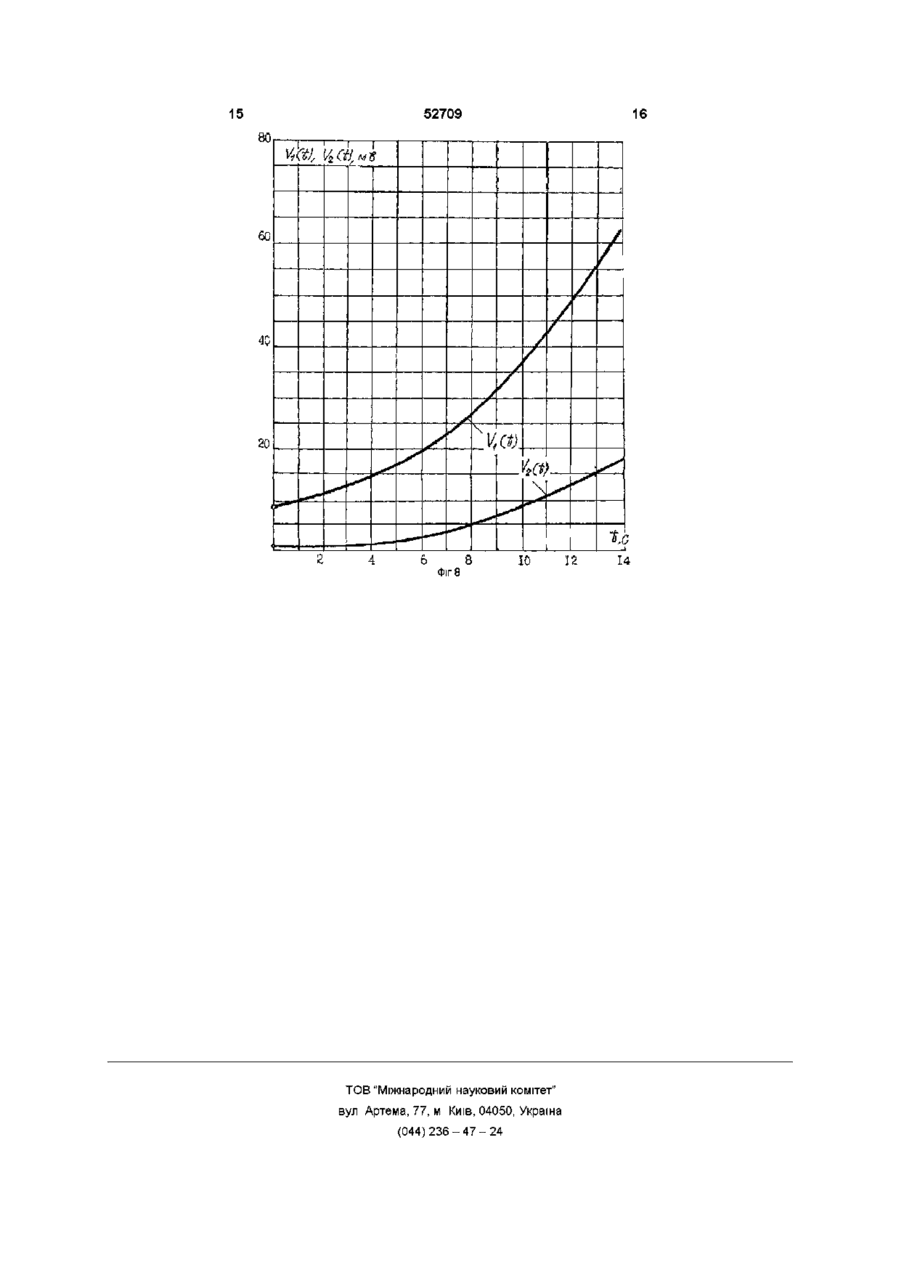
Спосіб вимірювання інерційних та гравітаційних прискорень балістичних ракет шляхом порівняння переміщення інерційного тіла з переміщенням, пропорційним сигналу на виході акселерометра, перетворення результуючого переміщення в електричний сигнал і підсилювання цього сигналу, який відрізняється тим, що діюче прискорення прикладають до першого та другого акселерометрів, переміщення чутливого елемента першого акселерометра алгебраїчно складають з переміщенням, пропорційним сигналу на виході другого акселерометра, і формують переміщення пропорційно отриманій сумі, переміщення чутливого елемента другого акселерометра порівнюють з переміщенням, пропорційним сигналу на виході першого акселерометра і формують переміщення пропорційно отриманій різниці, вимірюють сигнали на виходах першого та другого акселерометрів, кути тангажа, рискання і обертання, а шукані інерційне та гравітаційне прискорення відносно осей чутливості х, у і z визначають згідно з рівняннями Винахід відноситься до вимірювальної техніки і може бути використано для вимірювання ЛІНІЙНИХ прискорень в системах керування балістичних ракет та космічних апаратів Відомий спосіб вимірювання ЛІНІЙНИХ прискорень балістичних ракет шляхом вимірювання величини ЛІНІЙНОГО переміщення інерційного тіла [1] Недоліком цього способу є низька точність вимірювання ЛІНІЙНОГО прискорення, пов'язана з тим, що політ ракети відбувається в полі земного тяжіння і свідчення акселерометра не будуть відповідати істинному значенню прискорення ракети 9x(t) = A2Vix(t)-A1V2x(t) (А.,В2 +A 2 B 1 )sma(t) 1 a y (t) = g y (t) = a z (t) = D 2 Viy(t)-DiV 2 y(t) (C,D 2 +C 2 D 1 )sinp(t) 1 E 2 V 1 z (t) + E 1 V 2 z (t) F 2 V 1 z (t)-F 1 V 2 z (t) (E1F2+E2F1)siny(t)1 де ax(t), ay(t) і az(t) - інерційні прискорення відносно осей х, у і z, gx(t), gy(t) і gz(t) - гравітаційні прискорення відносно осей х, у і z, Vix(t) і V2x(t), Viy(t) і V2y(t), Viz(t) і V2z(t) - ВІДПОВІДНО сигнали на виходах 1-го та 2-го акселерометрів відносно осей х, у і z, a(t),p(t),y(t)- кути тангажа, рискання та обертанgz(t)= О ня, Аі і Аг, Сі і Сг, Е-і і Ег - ВІДПОВІДНО коефіцієнти пропорційності за інерційним прискоренням 1-го і 2-го каналів вимірювання відносно осей х, у і z, Ві і Вг, Di і D2, Fi і F2 — ВІДПОВІДНО коефіцієнти пропор ційності 1-го та 2-го каналів вимірювання відносно осей х, у і z о ю відносно інерційного простору Це відбувається тому, що на інерційне тіло акселерометра в польоті діє сила інерції F, сила ваги G та сила реакції опори R (фіг 1) Сила інерції пропорційна прискоренню ракети а при її русі відносно Землі Сила ваги пропорційна прискоренню земного тяжіння g Реакція опори врівноважує сили інерції і ваги У випадку рівноваги сил інерційне тіло акселерометра буде рухатись разом з ракетою Реакція опори пропорційна стиску пружини Вимірювання прискорення зводиться до вимірювання поздовжнього переміщення інерційного тіла 52709 Sx = Fx + Gx = m(ax + gxsma), де S x - переміщення інерційного тіла уздовж осі чутливості х, m - маса інерційного тіла, ах прискорення уздовж осі х, дх - прискорення земного тяжіння, a - кут тангажа (кут між вектором поздовжнього прискорення і ЛІНІЄЮ місцевого горизонту) Таким чином, інерційний акселерометр вимірює не істинне прискорення ах, а так зване гадане прискорення ага = а х + gsma Так як акселерометри не вимірюють гравітаційне прискорення, то для того, щоб інерційна система була спроможна обчислювати координати місцезнаходження об'єкта, необхідно якимось чином вводити в систему обчислення траєкторії руху сигнал, пропорційний вектору гравітаційного прискорення ах — а гх - д х Величина дх ВІДНОСНО величини істинного прискорення є методичною похибкою вимірювання Внаслідок того, що вектор гравітаційного прискорення змінюється при переміщенні об'єкта, і, крім того, змінюється його положення відносно осей чутливості, виникає складна задача створення спеціального обчислювального пристрою для вироблення сигналу, пропорційного гравітаційному прискоренню, для введення його у ВІДПОВІДНІ свідчення акселерометрів Відомий спосіб вимірювання ЛІНІЙНИХ прискорень, прототип, шляхом порівняння переміщення інерційного тіла з переміщенням, пропорційним сигналу на виході акселерометра, перетворювання цього переміщення в електричний сигнал і підсилювання сигналу [2] Недоліком відомого способу є методична похибка вимірювання ЛІНІЙНОГО прискорення, яка пов'язана з тим, що вимірюється не істинне, а гадане прискорення Принцип використання переміщення інерційної маси під впливом гаданого прискорення конструктивно ще може бути виконаний на основі маятникового та гіроскопічного акселерометрів [3] Але, не дивлячись на це, акселерометри, фізичний принцип дії яких заснований на лінійному чи кутовому переміщенні інерційної маси, не реєструють рух чутливого елемента під впливом гравітаційного прискорення, а вимірюване прискорення буде гаданим При цьому підвищення чутливості акселерометрів пов'язане зі зростанням маси чутливого елемента, а це, в свою чергу, приводить до зростання методичної похибки за рахунок зростання гравітаційного прискорення Мета винаходу - підвищення точності вимірювання шляхом усунення методичної похибки Поставлена мета досягається тим, що діюче прискорення прикладають до 1-го та 2-го акселерометрів, переміщення чутливого елемента 1-го акселерометра алгебраїчно складають з переміщенням, пропорційним сигналу на виході 2-го акселерометра і формують переміщення, пропорційне отриманій сумі, переміщення чутливого елемента 2-го акселерометра порівнюють з переміщенням, пропорційним сигналу на виході 1-го акселерометра і формують переміщення, пропор цінне отриманій різниці, вимірюють сигнали на виходах 1-го та 2-го акселерометрів, кути тангажа, рискання та обертання, а шукані інерційне та гравітаційне прискорення відносно осей чутливості х, у і z визначають згідно з рівняннями a v (t) = A.,B2 + A2B., A 2 Vix(t)-A 1 V 2 x (t) (A 1 B 2 + A 2 B 1 )sina(t) g y (t) : a.t = D 2 Viy(t)-DiV2y(t) (C1D2 + c 2 D i ) s m P ( t ) E 2 V 1 z (t)+E 1 V 2 z (t) a z w (E^+E^sinyft) де ax(t), ay(t) i az(t) - інерційні прискорення відносно осей х, у і z, gx(t),gy(t) i gz(t) - гравітаційні прискорення відносно осей х, у і z, Vix(t) і V2X(t), Viy(t) і V2y(t), Viz(t) і V2Z(t) - ВІДПОВІДНО сигнали на виходах 1-го та 2-го акселерометрів осей чутливості х, у і z, Аі і Аг, Сі і Сг, Еі і Ег - ВІДПОВІДНО коефі цієнти пропорційності за інерційним прискоренням 1-го і 2-го каналів вимірювання відносно осей х, у і z, Ві і Вг, Di і D2, F-i і F2 - ВІДПОВІДНО коефіцієнти пропорційності 1 -го та 2-го каналів вимірювання, а, Р, у - кути тангажа, рискання та обертання На фіг 2 зображена схема орієнтації акселерометрів відносно поздовжньої осі х, а на фіг З показана схема орієнтації акселерометрів відносно осей осей х, у і z На схемі показані 1-й та 2-й акселерометри 1, 2 поздовжньої осі х вимірювання і проприлад 3 вимірювання кута тангажа, 1-й та 2й акселерометри 4 і 5 бокової осі вимірювання z і проприлад 6 вимірювання кута обертання, 1-й та 2-й акселерометри 7 і 8 нормальної осі у вимірювання і проприлад 9 вимірювання кута рискання Із фіг 3 витікає, що для вимірювання поздовжнього, бокового і нормального прискорення на борту ракети потрібно мати три незалежні вимірювальні системи, кожна з яких отримує два акселерометри, які мають загальну вісь чутливості На фіг 4 приведена принципова схема обладнання для здійснення способу Обладнання містить 1-й акселерометр 1, в якому інерційна маса 2 підвищена на напрямній З Для зменшення тертя маса 2 знаходиться в рідині 4 і має нульову плавучість Сигнал, пропорційний переміщенню інерційної маси, знімається з індуктивного датчика 5 Після підсилювання в підсилювачі 6 сигнал надходить до 1-го електромагнітного (силового) приводу (ЕМСГТ) 7 ЕМСП 7 утворює контур зрівноваження 1-го акселерометра Обладнання містить 2-й акселерометр 8, в якому інерційна маса 9 підвішена за допомогою пружин 10 і має демпфер 11 Сигнал, пропорційний переміщенню інерційної маси 9, знімається з індуктивного датчика 12 Після підсилювання в підсилювачі 13 сигнал надходить на вхід 2-го ЕМСП 14 1-го акселерометра, а сигнал з виходу 52709 підсилювача 6 після підсилення в підсилювачі 15 надходить до входу ЕМСП 16 2-го акселерометра Виходи підсилювача 6 з'єднані з виходами модулів вводу аналогової інформації (аналого-цифровими перетворювачами (АЦП)) 17, 18 Обладнання містить проприлад 19, з'єднаний зі входом АЦП 20 АЦП 17, 18 і 20 за допомогою інтерфейсу 21 з'єднані з бортовою цифровою обчислювальною машиною (БЦОМ) 22, яка знаходиться на борту ракети Для виведення обчислювальної інформації з БЦОМ про значення інерційної та гравітаційної складових вимірювальна система одержить модулі виводу цифрової інформації - цифро-аналогові перетворювачі (ЦАП) 23, 24 ЦАП 23 видає значення інерційного прискорення в систему керування ракети для подальшого інтегрування і отримання значення істинної поздовжньої швидкості ракети, а ЦАП 24 видає значення гравітаційного прискорення в телеметричну систему для передачі на Землю і дослідження в подальшому гравітаційних полів Землі На фіг 5 зображена структурна схема вимірювальної системи за запропонованим способом Структурна схема містить чутливий елемент (ЧЕ) 1, 1-й суматор 2, елемент порівняння (ЕП) 3, датчик 4, підсилювач 5, ЕМСП 6 1-го акселерометра ЕМСП 6 утворює контур зрівноважування 1-го акселерометра Структурна схема містить ЧЕ 7, ЕП 8, датчик 9, підсилювач 10 2-го акселерометра Вихід 1-го підсилювача 5 з'єднаний зі входом підсилювача 12, вихід якого з'єднаний зі входом ЕМСП 13, вихід якого з'єднаний з другим входом ЕП 8 другого акселерометра, а вихід підсилювача 10 за допомогою 2-го ЕМСП // з'єднаний з 2-м входом суматора 2 1-го акселерометра Крім того, виходи підсилювачів 5 і 10 з'єднані з входами АЦП 14 і 15 Вихід датчика кута (проприлада) 16 з'єднаний зі входом АЦП 17 АЦП 14, 15 і 17 за допомогою інтерфейсу 18 з'єднані з БЦОМ 19 Для виводу обчислювальної інформації про значення інерційної і гравітаційної складових гаданого прискорення інтерфейс 18 з'єднаний з ЦАП 20 і 21 Структура, характеристики та алгоритми обробки обчислювальної інформації докладно описані в [5] Вимірювання ЛІНІЙНИХ прискорень балістичних ракет на прикладі поздовжньої осі вимірювання х здійснюється таким образом Рівняння чутливих елементів 1-го та 2-го акселерометрів мають вид Si(t) = Kiia(t) + Ki2g(t)sina(t) (1) S2(t) = K 2 ia(t) (2) де a(t) - діюче інерційне прискорення, g(t) - діюче гравітаційне прискорення, S-i(t) і S2(t) - ВІДПОВІДНО переміщення ЧЕ 1-го і 2-го акселерометрів, a(t) - кут тангажа (кут між поздовжньою віссю ракети і місцевим горизонтом), К Ц = S-і / а, К 2 і = S 2 / а [мм с /м] - коефіцієнти передачі за інерційною складовою гаданого прискорення 1-го та 2-го акселерометрів, К12 = S-і / g [мм с2/м] - коефіцієнт передачі за гравітаційною складовою гаданого прискорення 1-го акселерометра Відсутність в рівнянні (2) гравітаційної складової пояснюється такими обставинами Коли ракета знаходиться на стартовому столі, и прискорення дорівнює нулю ЧЕ 1-го акселерометра переміщується на величину, яка відповідає прискоренню 1д ЧЕ 2-го акселерометра зрівноважений пружинами таким чином, що його переміщення дорівнює нулю [6] Ці обставини можна подати рівняннями Vi = K12g (3) V2 = 0 (4) де V-і і V2 - сигнали на виходах 1-го і 2-го акселерометрів Особливість рівнянь (1) і (2) в тому, що Кц = К21 Ця умова повинна виконуватись для одержання рівних коефіцієнтів чутливості за інерційною складовою Рівняння контуру зрівноваження 1-го акселерометра має вид Vi(t) = Ki3ASi(t) (5) де ASi (7) - результуюче переміщення на виході суматора 2, К К К-із = — - результуючий коефіцієнт 1+ К5КпКе контуру зрівноваження, який включає датчик 4, підсилювач 5 і ЕМСП 6 Рівняння ланцюга перетворювання для 2-го акселерометра має вид V2(t) = K22AS2(t) (6) де AS2(t) - результуюче переміщення на виході елемента порівняння 8 2-го акселерометра ВІДПОВІДНО ДО запропонованого способу переміщення AS-i(t) 1-го акселерометра формується як алгебраїчна сума переміщення S-i(t) і переміщення, пропорційного сигналу на виході 2-го акселерометра у ВІДПОВІДНОСТІ до рівняння AS1(t) = S1(t) + K23V2Ct) (7) де Кгз - коефіцієнт передачі ЕМСП 11 Далі, переміщення AS2(t) формується як алгебраїчна різниця переміщення S2(t) ЧЕ 2-го акселерометра і переміщення, пропорційного сигналу на виході 1-го акселерометра у ВІДПОВІДНОСТІ ДО рівняння AS2(t) = S2(t) - Ki4Vi(t) (8) де Км - коефіцієнт передачі підсилювача 12 і ЕМСП 13 На основі рівнянь (1), (2), (5) - (8) можна скласти систему 2-х координатно пов'язаних рівнянь Vi(t) - Ki 3 K 23 (t) = KnKi3a(t) + K12K13g(t)sma(t) ^ 4 ^ 2 ^ ( 1 ) +V 2 (t) = K21K22a(t) (9) (10) Систему рівнянь (9) - (10) можна подати в матричній формі К12К2 (11) 52709 Вирішив систему (11), отримують систему 2-х параметрично пов'язаних рівнянь відносно 2-х невідомих a(t) і g(t) Vi(t) = Aia(t) + Big(t) sma(t) (12) V 2 (t) = A 2 a(t) + B 2 g(t) sma(t) (13) Де x _ к12к13 Д Рівняння (12) і (13) відображають вимірювальну систему, де рівняння (12) - це 1-й канал вимірювання, а рівняння (13) - 2-й канал вимірювання Вид коефіцієнтів показує, що їх значення можна довільно синтезувати за рахунок коефіцієнтів К-із, « и , К 2 2 і К 2 з, які входять у вимірювальну систему Ця обставина є значною позитивною якістю способу, тому що створює можливість формувати потрібні градуювальні характеристики 1-го та 2-го каналів Отримана система (12) - (13) відноситься до класу рефлексивних систем, так як в коефіцієнти Аі і Ві 1-го каналу вимірювання входять параметри 2-го каналу, а в коефіцієнти А 2 і В 2 1-го каналу вимірювання входять параметри 1-го каналу, причому, в протилежному, "відображеному" стані З системи (12) - (13) можна отримати рівняння, інваріантне відносно гравітаційної складової гаданого прискорення B 2 (Vi(t) - Aia(t)) = Bi(V 2 (t) + A 2 a(t)) (14) звідки інерційне прискорення уздовж поздовжньої осі чутливості х може бути отримано з рівняння (t) = 2 1xftJ+ 1 2х\Ч Із системи (12) - (13) можна отримати рівняння, інваріантне відносно складової гаданого прискорення A 2 (Vi(t) - Big(t)sina(t)) = Ai(V 2 (t) + B 2 g(t)sina(t)) звідки гравітаційне прискорення може бути отримане з рівняння 9 x t J ~ ( A ^ + A^jsmaft) ^ Таким чином, вводячи сигнали Vi x (t), V 2 x (t) і a(t) у ВІДПОВІДНОСТІ до тактової частоти функціонування процесора БЦОМ, визначають істинне значення інерційного прискорення балістичної ракети в польоті Відносно осей у і z нормального і бокового прискорень маємо такі рівняння (18) 9y(t) = D 2 Viy(t)-DiV2y(t) (19) a z ( t ) = ^ c t + B 7 c c (20) (21) де a y (t) і a z (t) - інерційні прискорення відносно нормальної у та бокової z осей чутливості, g y (t) і g z (t) - гравітаційні прискорення відносно нормальної та бокової осей чутливості, V-iy(t) і V2y(t) - сигнали на виходах 1-го та 2-го каналів нормального вимірювання, Vi z (t) і V2z(t) - сигнали на виходах 1го та 2-го каналів бокового вимірювання, p(t) і y(t) кути рискання і обертання, Сі і С 2 , Еі і Е 2 - коефіцієнти пропорційності за інерційним прискоренням, Di і D2, F-i і F2 - коефіцієнти пропорційності за гравітаційним прискоренням Для доведення здійснювання замовленого способу приведемо розрахунковий приклад Для цього задамо такі параметри вимірювальної системи Кц = К 2 і = 5, Кі2 = 0,6, К і з = 1, Кі4 = 0,5, К 2 2 = 1,25, К 2 3 = 0,8 Згідно З обраними параметрами вимірювальна система (12) - (13) буде відповідати таким числовим значенням Vi(t) = 6,666a(t) + 0,4g(t)sma(t), V 2 (t) = 2,083a(t) + 0,25g(t)sma(t) Значення параметрів вимірювальної системи можна отримати експериментальним шляхом визначення градуювальних характеристик акселерометрів [7] Спочатку визначають коефіцієнти Ві і В 2 , коли вимірювальна система знаходиться в нерухомому стані, вертикально на землі Тоді, наприклад, при вимірюванні отримаємо 9,81 Ві = 3,924, отже В1 = 0,4, 9,81 В 2 = 2,452, отже В 2 = 0,25 Далі, на спеціальному вимірювальному еталонному стенді надають вимірювальній системі еталонне прискорення, наприклад, а = 2 17,256 = 2Аі + 0,4 9,81, отже А і = 6,666, 1,714 = 2 А 2 - 0 , 2 5 9,81, отже Аі = 2,083 Для розрахунку приведених рівнянь визначимо функції змінних за t a(t) = 1 +exp(0,15t)нелінійна функція зміни інерційного прискорення (фіг 6), ,16) g(t) = 9,81 + ехр(-0,0051)-нелінійна функція зміни гравітаційного прискорення, a(t) = 0,785 + 0,308 нелінійна функція зміни кута тангажа, (фіг 7) З останнього рівняння слідує, що ракета виконує коливальний рух відносно кута тангажа а = 45° з амплітудою а т а х - 17,5° і частотою f = 0,08Гц З розрахунком приведених вище залежностей рівняння (12) - (13) будуть відповідати таким рівнянням Vi(t) = 6,666(1 + exp(0,15t)) + 3,924ехр(0,005t)sm(0,785 + 0,308sm0,25t) V 2 (t) = 2,083(1 + exp(0,15t)) - 2,452exp(0,055t)sm(0,785 + 0,308sm0,25t) Приведені рівняння моделювались на ПК Результати моделювання показані в т а б л 1 52709 10 Таблиця 1 t, с a(t), м/с" g(t), м/с" a°(t) sma°(t) Vi(t), MB V2(t), MB 0 1 9,81 45 0,707 9,440 0,350 2 1,35 9,71 53,2 0,798 12,098 0,875 4 1,82 9,61 59,7 0,866 15,460 1,711 6 2,45 9,51 62,5 0,882 19,686 3,007 8 3,35 9,41 60,9 0,874 25,620 4,922 Вид зміни функцій Vi(t) і V2(t) показаний на фіг 8 Проведемо, вимірювання за запропонованим способом згідно з рівняннями (15) і (17) 0,25 • 12,098 + 0,4 • 0,875 3,374 at = 2 = = 1,35 6,666-0,25 + 2,083-0,4 2,499 2,083 • 12,098 - 6,666 • 0,875 19,368 gt = 2 = = 9,71 (2,083 • 0,4 + 6,666 • 0,25)0,798 0,25-15,460 + 0,4-1,711 1,994 4,549 = \,o2 2,499 2,499 2,083 • 15,460 - 6,666 • 1,711 20,798 gt = 4 = = 9,61 at = 4 = 2,499-0,866 at = 6 = gt = e = at = 8 = 2,164 0 , 2 5 - 1 9 , 6 9 6 + 0 , 4 - 3 , 0 0 7 _ 6,123 2,499 = 2,45 ~ 2,499 2,083 • 1 9 , 6 8 6 - 6 , 6 6 6 • 3 , 0 0 7 2,499-0,882 20,961 2,204 0 , 2 5 - 2 5 , 6 2 0 + 0 , 4 - 4 , 9 2 2 _ 8,373 2,499 ~ 2,499 2,083 • 2 5 , 6 2 0 - 6,666 • 4 , 9 2 2 = 9,51 = 3,35 20,556 = 9,41 2,499-0,874 2,184 0,25-39,582 + 0,4-9,506 _ 13,697 at=10 = = 5,48 2,499 ~ 2,499 2,083 • 39,582-6,666 • 9,506 19,083 gft = 10) = = 9,32 2,499-0,819 2,046 gt = s = Приведені розрахунки доказують ДІЄВІСТЬ заявленого способу вимірювання ЛІНІЙНИХ прискорень балістичних ракет і високу точність вимірювання При цьому обчислювання гравітаційного прискорення g(t) для рішення навігаційних задач керування балістичними ракетами на активній ДІЛЯНЦІ польоту не вимагається Головна вимога при цьому - вимірювання істинного прискорення, що для поздовжнього прискорення зменшує похибку 10 5,48 9,32 55,3 0,819 39,582 9,506 12 7,05 9,22 47,4 0,731 49,690 13,001 14 9,16 9,13 38,5 0,615 63,305 17,677 16 12,02 9,04 29,5 0,484 81,875 23,944 18 15,88 8,95 26,3 0,438 107,424 32,098 керування балістичними ракетами за дальністю [8] Визначення гравітаційного прискорення здійснюється з науковою метою для побудови та дослідження гравітаційних полів Землі На ракетах без БЦОМ для здійснення способу можна рекомендувати процесорні вимірювальні засоби, які докладно описані в [9] Література 1 Физические основы ракетного оружия - М Воениздат, 1972 -с 188-189 2 Боднер В А Приборы первичной информации // Учебник для авиационных вузов - М Машиностроение, 1981 -с 65-68 3 Назаров Б И , Хлебников ГА Гидростабилизаторы ракет - М Воениздат, 1975 - с 96-98 4 Разыграев А П Основы управления полетом космических аппаратов и кораблей / Под ред акад Петрова Б Н - М Машиностроение, 1977 - С 56 5 Динамика систем управления ракет с бортовыми цифровыми вычислительными машинами Изд 2-е перераб и доп - М Машиностроение, 1976 -С 34-55 6 Ягодкин В В , Хлебников ГА Гироприборы баллистических ракет - М Воениздат, 1967 - С 88 89 7 Спектор С А Электрические измеренияфизических величин Методы измерений - Л Энергоатомиздат, 1987 -С 230-233 8 Жаков А М Управление баллистическими ракетами и космическими объектами - М Воениздат, 1974 -С 49-59, 80-81 9 Цветков Э И Процессорные измерительные средства - Л Энергоатомиздат, - 1989 С 31-51 Фіг1 11 52709 12 ШСПІЖУ гор'/aof-t Г місцевий гошзон? 2 ФІГ II 8 / 9 / 10 / / 2 З І З ? / 19 IE ІЗ Ч І6 / 15 17 21 I E 13 52709 I 14 ч в. "і 4 • Г/ ФІГ 5 | / — — — / / ! / / / / > / 1С ФІГ < 4 б 3 10 12 12 6 14 16 18 20 22 21 15 16 52709 і мі ——J єо / / / / / / .— У а) ^* kt *** *** ' '1 a 4 Фіг 8 10 TOB "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24 п 12 14
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measuring inertial or gravitational acceleration acting on a ballistic rocket
Назва патенту російськоюСпособ измерения инерциального или гравитационного ускорения, действующего на баллистическую ракету
МПК / Мітки
МПК: G01P 15/02, G01C 21/24
Мітки: балістичних, гравітаційних, ракет, прискорень, спосіб, вимірювання, інерційних
Код посилання
<a href="https://ua.patents.su/8-52709-sposib-vimiryuvannya-inercijjnikh-ta-gravitacijjnikh-priskoren-balistichnikh-raket.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання інерційних та гравітаційних прискорень балістичних ракет</a>
Спосіб вимірювання прискорень на обресорених частинах рухомого складу
Номер патенту: 32264
Опубліковано: 15.12.2000
Автори: Сапарова Лариса Сергійовна, Михайленко Віталій Михайлович, Блохін Євген Петрович, Оптовець Світлана Петрівна, Мямлін Сергій Віталійович
МПК: G01P 15/00, B61C 11/00
Мітки: спосіб, вимірювання, складу, прискорень, обресорених, рухомого, частинах
Текст:
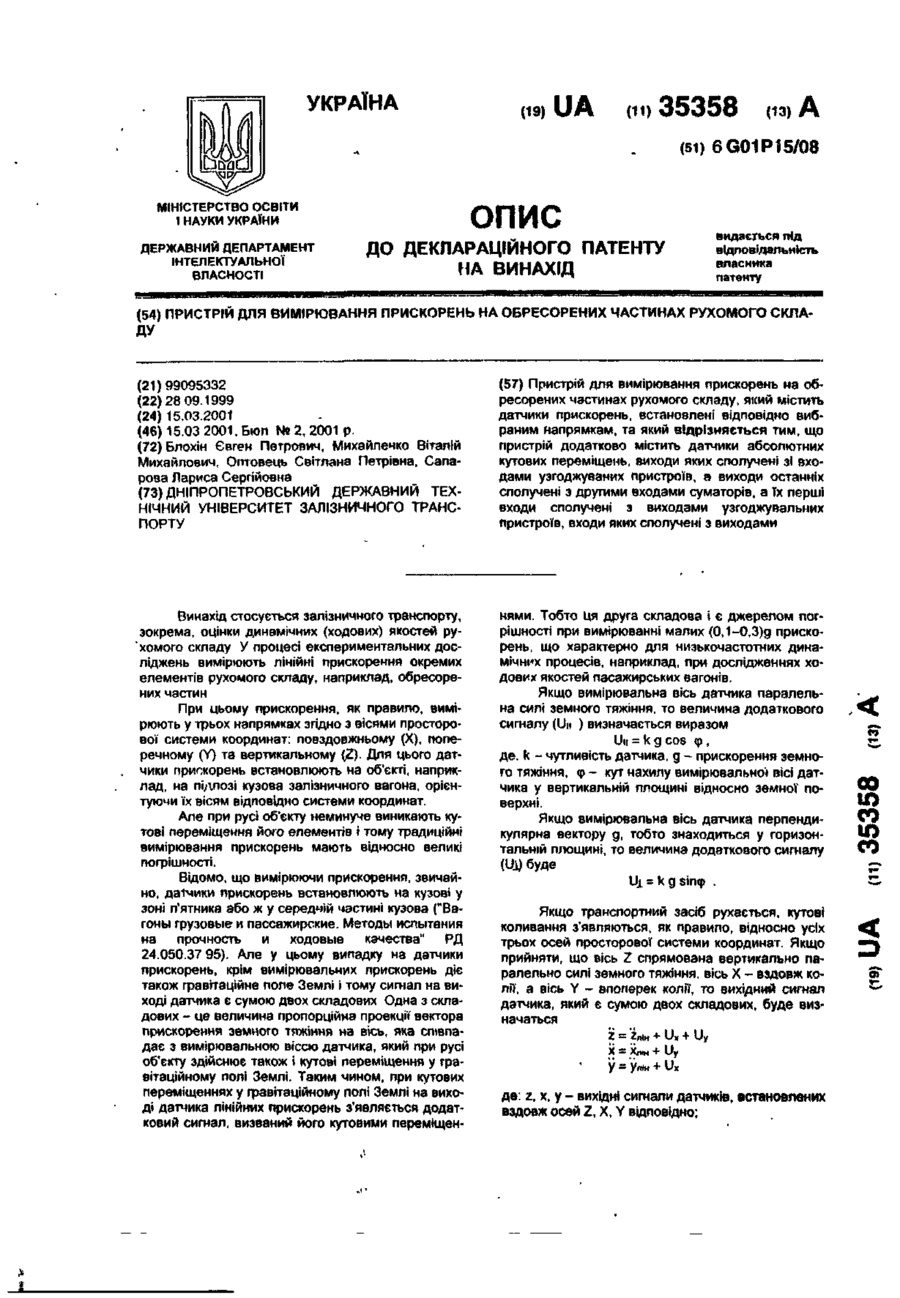
...буде Uj_=k- g- sin ф. Якщо транспортний засіб рухається, кутові коливання, як правило, з'являються відносно усіх трьох вісей просторової системи координат. Якщо прийняти, що вісь Z спрямована вертикально, паралельно силі земного тяжіння, вісь X - спрямована вздовж шляху руху, вісь Y - упоперек шляху, то вихідний сигнал датчика, вимірю вальна вісь якого спрямована вздовж вісі Z, є сумою двох сигналів, сигналу відповідного лінійному...
Пристрій для вимірювання прискорень на обресорених частинах рухомого складу
Номер патенту: 35358
Опубліковано: 15.03.2001
Автори: Блохін Євген Петрович, Оптовець Світлана Петрівна, Михайленко Віталій Михайлович, Сапарова Лариса Сергійовна
МПК: G01P 15/08
Мітки: рухомого, пристрій, обресорених, складу, вимірювання, частинах, прискорень
Формула / Реферат:
Пристрій для вимірювання прискорень на обресорених частинах рухомого складу, який містить датчики прискорень, встановлені відповідно вибраним напрямкам, та який відрізняється тим, що пристрій додатково містить датчики абсолютних кутових переміщень, виходи яких сполучені зі входами узгоджуваних пристроїв, а виходи останніх сполучені з другими входами суматорів, а їх перші входи сполучені з виходами узгоджувальних пристроїв, входи яких...
Пристрій для вимірювання прискорень на транспортному засобі
Номер патенту: 36348
Опубліковано: 16.04.2001
Автори: Сапарова Лариса Сергійовна, Михайленко Віталій Михайлович, Оптовець Світлана Петрівна, Блохін Євген Петрович
МПК: G01P 15/08
Мітки: пристрій, транспортному, прискорень, засоби, вимірювання
Текст:
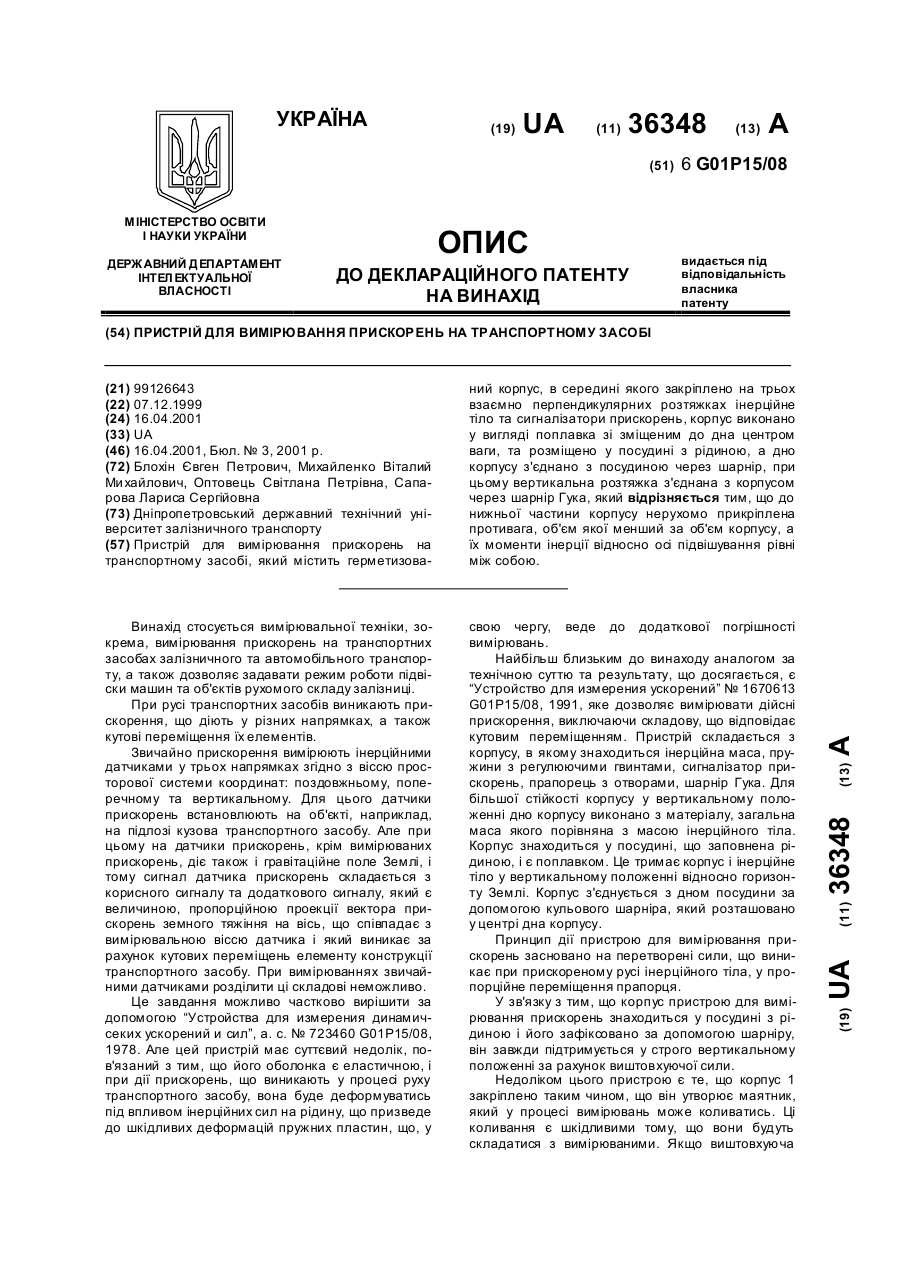
...більший за об'єм противаги, корпус за рахунок виштовхуючої сили утримується у суворо вертикальному положенні відносно горизонту Землі, що дозволяє уникнути похибки, пов'язаної з кутовим переміщенням елементів конструкції транспортного засобу. Технічний результат винаходу полягає у можливості вимірювати тільки лінійні прискорення. Запропонований пристрій може бути використаним усюди, де треба вимірювати прискорення на транспортних засобах...
Пристрій і спосіб для вимірювання гравітаційних полів
Номер патенту: 45363
Опубліковано: 15.04.2002
Автор: Веряскін Олексій Володимирович
МПК: G01V 7/00
Мітки: гравітаційних, вимірювання, спосіб, пристрій, полів
Формула / Реферат:
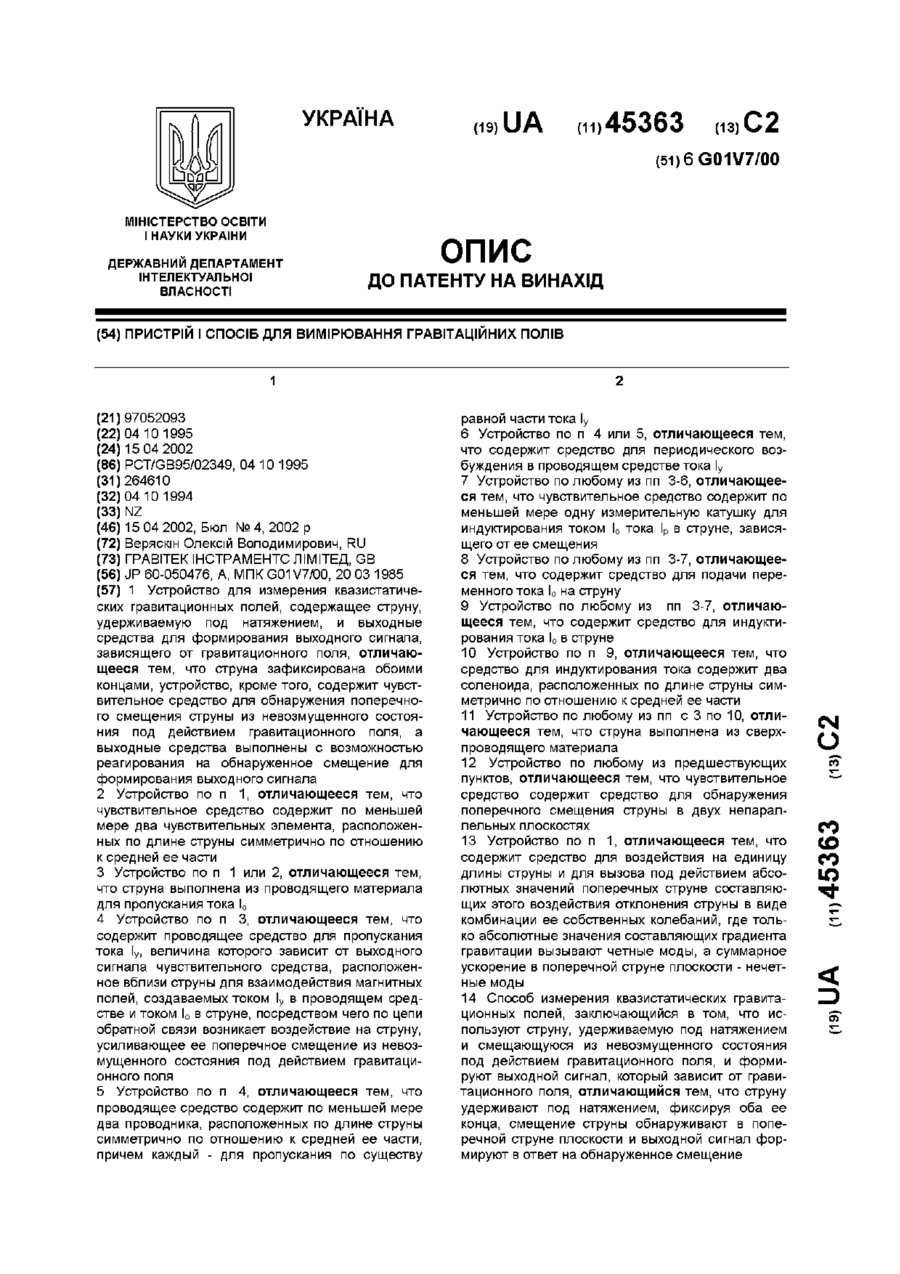
1. Устройство для измерения квазистатических гравитационных полей, содержащее струну, удерживаемую под натяжением, и выходные средства для формирования выходного сигнала, зависящего от гравитационного поля, отличающееся тем, что струна зафиксирована обоими концами, устройство, кроме того, содержит чувствительное средство для обнаружения поперечного смещения струны из невозмущенного состояния под действием гравитационного поля, а выходные...
Пристрій для вимірювання параметрів інерційних ланок
Номер патенту: 4063
Опубліковано: 27.12.1994
Автори: Гусєв Ігор Вікторович, Левочко Борис Степанович, Ситник Борис Тимофійович, Мамонов Анатолій Васильович, Загарій Генадій Іванович, Гусєв Павло Вікторович
МПК: G05B 23/02
Мітки: параметрів, вимірювання, ланок, пристрій, інерційних
Формула / Реферат:
Устройство для измерения параметров инерционных звеньев, содержащее блок вычисления параметров передаточной функции, первый и второй фильтры, выходы которых подключены соответственно к первому и второму входам блока вычисления параметров передаточной функции, выход которого является выходом устройства, а первые входы первого и второго фильтров подключены соответственно к выходу и входу исследуемого звена, вход которого является входом...
Попередній патент: Система газопостачання транспортних засобів
Наступний патент: Шихта для виготовлення вогнеприпасу, що містить кордіерит
Випадковий патент: Тарілка масообмінної колони