Моделюючий комплекс для дослідження/розрахунку просторового руху підводного апарата-робота

Формула / Реферат
Моделюючий комплекс для дослідження/розрахунку просторового руху підводного апарата-робота, що містить блок вводу інформації, блок моделювання і обробки інформації системи автоматичного керування, блок збереження інформації і заданих траєкторій руху та блок аналізу результатів моделювання, при цьому вихід блока вводу інформації зв'язаний із входом блока моделювання і обробки інформації системи автоматичного керування, вихід блока моделювання і обробки інформації системи автоматичного керування зв'язаний із входом блока аналізу результатів моделювання, а вихід блока збереження інформації і заданих траєкторій руху зв'язаний із входом блока вводу інформації, який відрізняється тим, що до складу комплексу додатково введено систему розрахунку елементів просторового руху самохідного прив'язного підводного апарата-робота, при цьому до складу системи розрахунку елементів просторового руху самохідного прив'язного підводного апарата-робота входять блок моделювання і обробки інформації кабельної лебідки, блок моделювання і обробки інформації кабель-троса, блок моделювання і обробки інформації самохідного прив'язного підводного апарата-робота та блок моделювання і обробки інформації зовнішніх збурень, зазначена система розрахунку елементів просторового руху самохідного прив'язного підводного апарата-робота розміщена в ланцюзі між блоком моделювання і обробки інформації системи автоматичного керування та блоком аналізу результатів моделювання, причому перший вихід блока моделювання і обробки інформації системи автоматичного керування зв'язаний із входом блока аналізу результатів моделювання через перший вхід блока моделювання і обробки інформації самохідного прив'язного підводного апарата-робота, другий вихід блока моделювання і обробки інформації самохідного прив'язного підводного апарата-робота зв'язаний із входом блока моделювання і обробки інформації кабельної лебідки, вихід блока моделювання і обробки інформації кабельної лебідки зв'язаний з першим входом блока моделювання і обробки інформації кабель-троса, вихід блока моделювання і обробки інформації кабель-троса зв'язаний із другим входом блока моделювання і обробки інформації самохідного прив'язного підводного апарата-робота, перший вихід блока моделювання і обробки інформації зовнішніх збурень зв'язаний із другим входом блока моделювання і обробки інформації кабель-троса, а другий вихід блока моделювання і обробки інформації зовнішніх збурень зв'язаний із третім входом блока моделювання і обробки інформації самохідного прив'язного підводного апарата-робота.
Текст
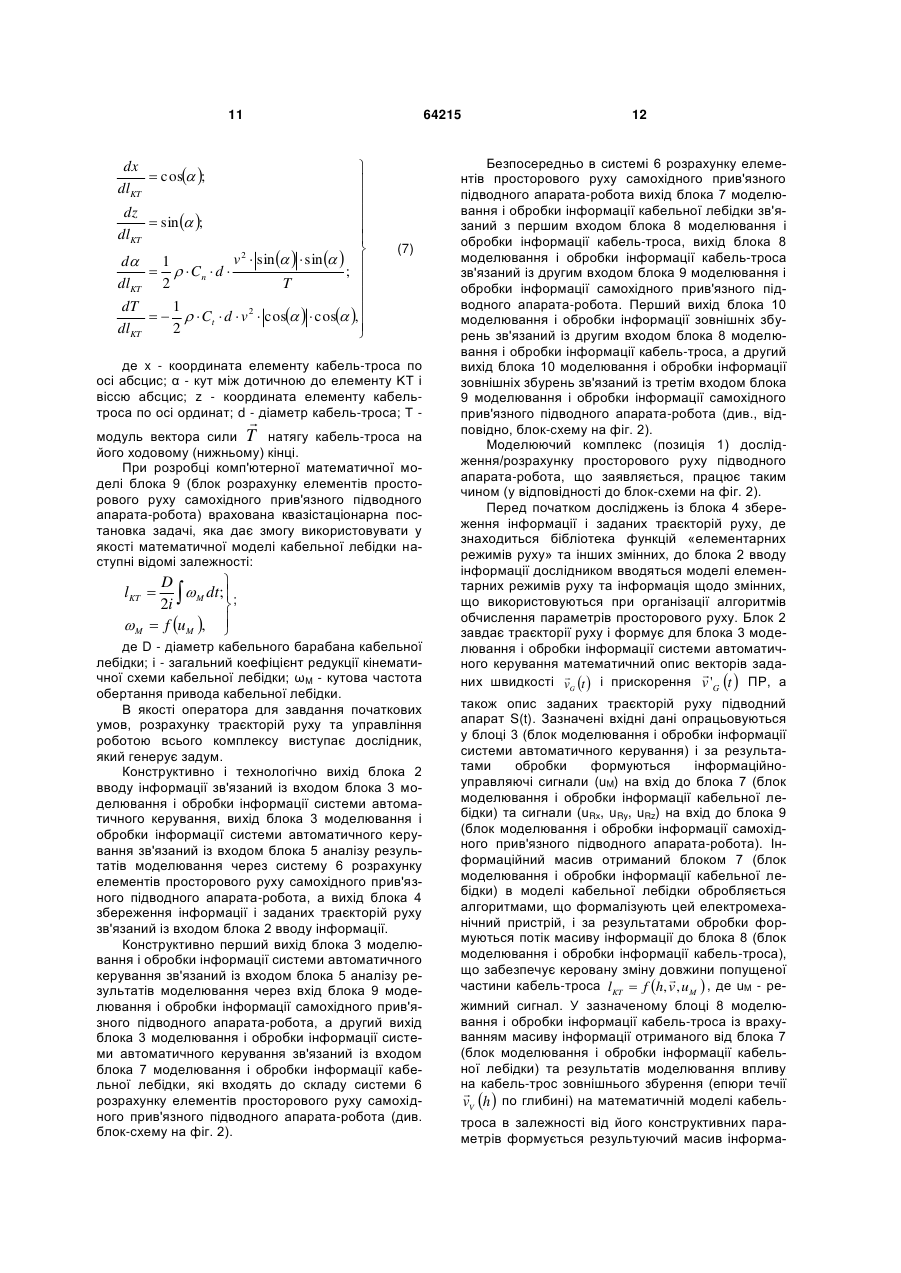
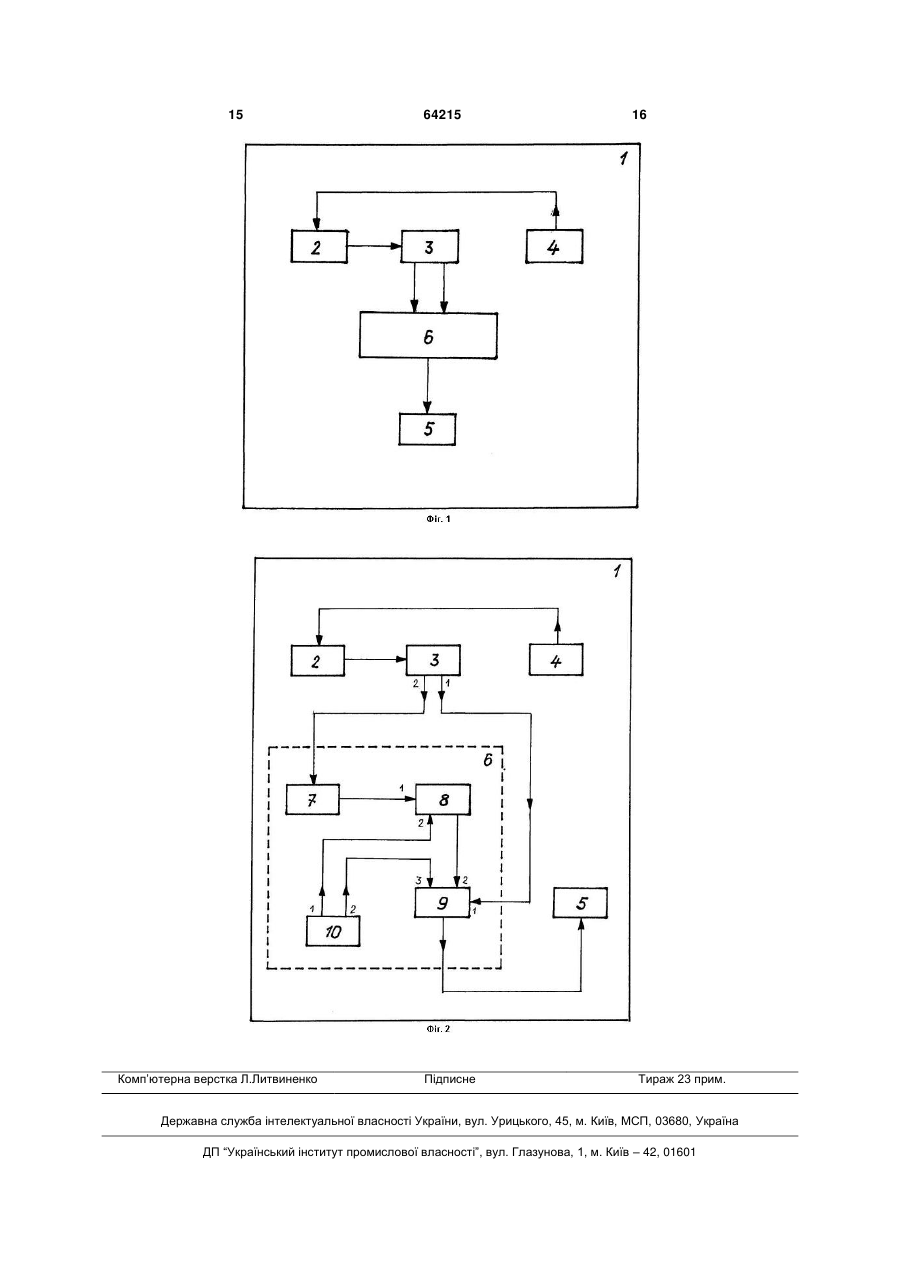
Моделюючий комплекс для дослідження/розрахунку просторового руху підводного апарата-робота, що містить блок вводу інформації, блок моделювання і обробки інформації системи автоматичного керування, блок збереження інформації і заданих траєкторій руху та блок аналізу результатів моделювання, при цьому вихід блока вводу інформації зв'язаний із входом блока моделювання і обробки інформації системи автоматичного керування, вихід блока моделювання і обробки інформації системи автоматичного керування зв'язаний із входом блока аналізу результатів моделювання, а вихід блока збереження інформації і заданих траєкторій руху зв'язаний із входом блока вводу інформації, який відрізняється тим, що до складу комплексу додатково введено систему розрахунку елементів просторового руху самохідного прив'язного підводного апарата-робота, при цьому до складу системи розрахунку елементів просторового руху самохідного прив'язного підводного апарата-робота входять блок моделювання і обробки інформації кабельної лебідки, блок моделювання і обробки інформації кабель-троса, блок моделювання і обробки інформації самохідного прив'язного підводного апарата-робота та блок U 2 (19) 1 3 об'єкт озброєння або військової техніки. При цьому необхідно використовувати інформаційнорозрахункові системи або комплекси, що містять блоки/системи або підсистеми багатокритеріального параметричного синтезу. Даний комплекс повинен видавати параметри об'єкта, що формується, і розширювати комплект таких параметрів з урахуванням специфіки розроблювальної концепції характеристиками, які впливають на технікоекономічні та тактико-технічні характеристики розроблювальної техніки, а саме, самохідних прив'язних підводних апаратів-роботів. Самохідні прив'язні підводні апарати-роботи належать до ефективних засобів морської техніки і широко використовуються при виконанні пошукових та інспекційних підводних робіт [1-2]. Особливо перспективним є застосування самохідних прив'язних підводних апаратів-роботів для підводного моніторингу акваторій, висвітлення підводної обстановки та протимінних операцій в місцях якірних стоянок надводних кораблів. Такі технології передбачають обстеження водної товщі та донної поверхні за допомогою відео- та гідроакустичних систем, ідентифікацію виявлених об'єктів та транспортування до них спеціальних приладів [3-4]. Відомий комплекс формування вигляду складних технічних систем, що містить підсистему розробки техніко-економічних показників і тактикотехнічних вимог до формованого об'єкта, підсистему розробки критеріїв ефективності і застосування формованого об'єкта, підсистему введення обмежень у конструкцію і параметри формованого об'єкта, підсистему параметричної оптимізації і корегування технічних характеристик об'єкта та підсистему формування вигляду перспективного складного об'єкта/системи, при цьому виходи зазначених підсистем розробки техніко-економічних показників і тактико-технічних вимог до формованого об'єкта, розробки критеріїв ефективності й застосування формованого об'єкта та підсистеми введення обмежень у конструкцію й параметри формованого об'єкта з'єднано з відповідними входами підсистеми параметричної оптимізації й корегування технічних характеристик об'єкта, а вихід зазначеної підсистеми параметричної оптимізації й корегування технічних характеристик об'єкта з'єднано з входом підсистеми формування вигляду перспективного складного об'єкта/системи [5]. До недоліків відомого комплексу формування виду складних технічних систем відноситься те, що при відомому конструктивному виконанні комплексу не враховуються елементи штучного інтелекту, не здійснюється збір та аналіз зовнішньої та внутрішньої системної (параметри і показники роботи технічних засобів - зброї і/або військової техніки нового покоління) інформації, а також формування відповідних керуючих команд та потрібного значення інтегрального показника корисних функцій систем, що входять до складу зазначеного комплексу, і комплексу в цілому. До недоліків відомого комплексу відноситься й те, що його структура не передбачає можливості незалежного регулювання параметрів, які визначають ефективність функціонування різних за призначенням складних технічних систем в різних режимах експлуатації. 64215 4 Відомий автоматизований комплекс дослідження/розрахунку просторового руху підводного апарата-робота, що містить командний блок постановки завдань і керування процесом формування об'єкта типу самохідного прив'язного підводного апарата-робота, систему обґрунтування рівня якості створюваного об'єкта, систему формування вигляду перспективного складного об'єкта, центральну систему введення даних, підсистему вибору оптимального варіанту техніко-економічних вимог та тактико-технічних вимог, і безпосередньо блок формування перспективного складного об'єкта, при цьому вхід/вихід командного блока постановки завдань і керування процесом формування об'єкта з'єднано з першим входом/виходом центральної системи введення даних, другий вхід/вихід центральної системи введення даних з'єднано з першим входом/виходом системи обґрунтування рівня якості створюваного об'єкта, третій вхід/вихід центральної системи введення даних з'єднано з входом/виходом системи формування вигляду перспективного складного об'єкта, другий вхід/вихід системи обґрунтування рівня якості створюваного об'єкта з'єднано з входом/виходом підсистеми вибору оптимального варіанту техніко-економічних вимог та тактикотехнічних вимог, вихід центральної системи введення даних з'єднано з першим входом блока формування перспективного складного об'єкта, а вихід системи формування вигляду перспективного складного об'єкта з'єднано з другим входом блока формування перспективного складного об'єкта [6]. До недоліків відомого комплексу відноситься те, що не враховуються елементи штучного інтелекту, не здійснюється збір та аналіз зовнішньої та внутрішньо системної (параметри і показники роботи технічних засобів нового покоління - апаратівроботів) інформації, а також формування відповідних керуючих команд та потрібного значення інтегрального показника корисних функцій апаратаробота в цілому. До недоліків відомого комплексу відноситься й те, що його структура не передбачає можливості незалежного регулювання параметрів підводного апарата-робота, які визначають ефективність функціонування складних технічних систем в різних режимах експлуатації, та не містить власної адаптивної системи керування, системи збору зовнішньої та внутрішньої інформації та системи обробки інформації і формування керуючих команд. Найбільше близьким технічним рішенням, як по суті, так і по задачах, що вирішуються, яке обрано за найближчий аналог (прототип), є моделюючий комплекс дослідження/розрахунку просторового руху підводного апарата-робота, що містить блок вводу інформації, блок моделювання і обробки інформації системи автоматичного керування, блок збереження інформації і заданих траєкторій руху та блок аналізу результатів моделювання, при цьому вихід блока вводу інформації зв'язаний із входом блока моделювання і обробки інформації системи автоматичного керування, вихід блока моделювання і обробки інформації системи автоматичного керування зв'язаний із входом блока 5 аналізу результатів моделювання, а вихід блока збереження інформації і заданих траєкторій руху зв'язаний із входом блока вводу інформації [7]. До недоліків відомого моделюючого комплексу, що обраний за найближчий аналог (прототип), відноситься те, що в ньому не враховується вплив кабель-троса та зовнішніх збурень на гідродинамічні характеристики підводного апарату, тому точність визначення оптимальних параметрів і характеристик складних технічних систем типу прив'язний самохідний підводний апарат є низькою. В основу корисної моделі покладена задача шляхом усунення недоліків прототипу забезпечити підвищення якості розробки технічних вимог великих/складних технічних систем типу самохідних прив'язних підводних апаратів-роботів за найкоротший час та визначення оптимальної залежності між характеристиками і параметрами таких систем. Суть технічного рішення в моделюючому комплексі дослідження/розрахунку просторового руху підводного апарата-робота, що містить блок вводу інформації, блок моделювання і обробки інформації системи автоматичного керування, блок збереження інформації і заданих траєкторій руху та блок аналізу результатів моделювання, при цьому вихід блока вводу інформації зв'язаний із входом блока моделювання і обробки інформації системи автоматичного керування, вихід блока моделювання і обробки інформації системи автоматичного керування зв'язаний із входом блока аналізу результатів моделювання, а вихід блока збереження інформації і заданих траєкторій руху зв'язаний із входом блока вводу інформації, полягає в тому, що до складу комплексу додатково введено систему розрахунку елементів просторового руху самохідного прив'язного підводного апарата-робота. Суть корисної моделі полягає і в тому, що до складу системи розрахунку елементів просторового руху самохідного прив'язного підводного апарата-робота входять блок моделювання і обробки інформації кабельної лебідки, блок моделювання і обробки інформації кабель-троса, блок моделювання і обробки інформації самохідного прив'язного підводного апарата-робота та блок моделювання і обробки інформації зовнішніх збурень, зазначена система розрахунку елементів просторового руху самохідного прив'язного підводного апарата-робота розміщена в ланцюзі між блоком моделювання і обробки інформації системи автоматичного керування та блоком аналізу результатів моделювання. Суть корисної моделі полягає також і в тому, що перший вихід блока моделювання і обробки інформації системи автоматичного керування зв'язаний із входом блока аналізу результатів моделювання через перший вхід блока моделювання і обробки інформації самохідного прив'язного підводного апарата-робота, другий вихід блока моделювання і обробки інформації самохідного прив'язного підводного апаратаробота зв'язаний із входом блока моделювання і обробки інформації кабельної лебідки, вихід блока моделювання і обробки інформації кабельної лебідки зв'язаний з першим входом блока моделю 64215 6 вання і обробки інформації кабель-троса, вихід блока моделювання і обробки інформації кабельтроса зв'язаний із другим входом блока моделювання і обробки інформації самохідного прив'язного підводного апарата-робота, перший вихід блока моделювання і обробки інформації зовнішніх збурень зв'язаний із другим входом блока моделювання і обробки інформації кабель-троса, а другий вихід блока моделювання і обробки інформації зовнішніх збурень зв'язаний із третім входом блока моделювання і обробки інформації самохідного прив'язного підводного апарата-робота. Порівняльний аналіз технічного рішення з прототипом показує, що моделюючий комплекс дослідження/розрахунку просторового руху підводного апарата-робота, який заявляється, відрізняється тим, що до складу комплексу додатково введено систему розрахунку елементів просторового руху самохідного прив'язного підводного апаратаробота, при цьому до складу системи розрахунку елементів просторового руху самохідного прив'язного підводного апарата-робота входять блок моделювання і обробки інформації кабельної лебідки, блок моделювання і обробки інформації кабель-троса, блок моделювання і обробки інформації самохідного прив'язного підводного апаратаробота та блок моделювання і обробки інформації зовнішніх збурень, зазначена система розрахунку елементів просторового руху самохідного прив'язного підводного апарата-робота розміщена в ланцюзі між блоком моделювання і обробки інформації системи автоматичного керування та блоком аналізу результатів моделювання, причому перший вихід блока моделювання і обробки інформації системи автоматичного керування зв'язаний із входом блока аналізу результатів моделювання через перший вхід блока моделювання і обробки інформації самохідного прив'язного підводного апарата-робота, другий вихід блока моделювання і обробки інформації самохідного прив'язного підводного апарата-робота зв'язаний із входом блока моделювання і обробки інформації кабельної лебідки, вихід блока моделювання і обробки інформації кабельної лебідки зв'язаний з першим входом блока моделювання і обробки інформації кабель-троса, вихід блока моделювання і обробки інформації кабель-троса зв'язаний із другим входом блока моделювання і обробки інформації самохідного прив'язного підводного апарата-робота, перший вихід блока моделювання і обробки інформації зовнішніх збурень зв'язаний із другим входом блока моделювання і обробки інформації кабель-троса, а другий вихід блока моделювання і обробки інформації зовнішніх збурень зв'язаний із третім входом блока моделювання і обробки інформації самохідного прив'язного підводного апарата-робота. Досягнення технічного результату дійсно можливо, тому що шляхом введення до складу комплексу блока моделювання і обробки інформації кабельної лебідки зростає достовірність моделювання за рахунок врахування впливу кабельної лебідки на результати моделювання, шляхом введення до складу комплексу блока моделювання і обробки інформації кабель-троса зростає достові 7 рність моделювання за рахунок врахування впливу кабель-троса на результати моделювання, шляхом введення до складу комплексу блока моделювання і обробки інформації самохідного прив'язного підводного апарата-робота досягається найбільш повне моделювання всієї складної системи, а шляхом введення до складу комплексу блока моделювання і обробки інформації зовнішніх збурень досягається врахування в моделі зовнішніх збурень. Таким чином моделюючий комплекс дослідження/розрахунку просторового руху підводного апарата-робота, що заявляється, відповідає критерію корисної моделі «новизна». Суть корисної моделі пояснюється за допомогою ілюстрацій, де на фіг. 1 показано узагальнену блок-схему моделюючого комплексу дослідження/розрахунку просторового руху підводного апарата-робота, що заявляється, на фіг. 2 показано блок-схему моделюючого комплексу дослідження/розрахунку просторового руху підводного апарата-робота, що заявляється. Моделюючий комплекс (позиція 1) дослідження/розрахунку просторового руху підводного апарата-робота, що заявляється, містить (як варіант конструктивного виконання) блок 2 вводу інформації, блок 3 моделювання і обробки інформації системи автоматичного керування, блок 4 збереження інформації і заданих траєкторій руху, блок 5 аналізу результатів моделювання та систему 6 розрахунку елементів просторового руху самохідного прив'язного підводного апарата-робота (див. блок-схему на фіг. 1). Конструктивно до складу системи 6 розрахунку елементів просторового руху самохідного прив'язного підводного апарата-робота входять: блок 7 моделювання і обробки інформації кабельної лебідки, блок 8 моделювання і обробки інформації кабель-троса, блок 9 моделювання і обробки інформації самохідного прив'язного підводного апарата-робота та блок 10 моделювання і обробки інформації зовнішніх збурень (див. блок-схему на фіг. 2). У блоці (позиція 4) збереження інформації і заданих траєкторій руху знаходиться бібліотека функцій «елементарних режимів руху» та інших змінних. Моделі елементарних режимів руху та інформація щодо змінних використовуються при організації алгоритмів обчислення параметрів просторового руху. Крім того блок 4 (блок збереження інформації і заданих траєкторій руху) містить в собі математичний опис векторів заданих швидкості vG t і прискорення v 'G t підводного апарату, а також опис заданих траєкторій руху підводного апарату S(t). Блок (2) вводу інформації призначений для завдання початкових умов, розрахунку траєкторій руху та управління роботою всього комплексу. Блок (3) моделювання і обробки інформації від системи автоматичного управління моделює і реалізовує алгоритми прийнятих рішень про поведінку підводного апарата-робота в кожній точці траєкторії на підставі закладених алгоритмів управління підводного апарата та команд, що поступають від блока вводу інформації. 64215 8 Блок (5) аналізу результатів моделювання узагальнює наслідки комп'ютерних розрахунків і формує кінцеві результати досліджень. В цілому задача моделювання досліджень просторового руху такого самохідного підводного апарата-робота вирішується сукупністю блоків математичних моделей його елементів, що взаємодіють між собою (відповідно, блоки 3-10) - див. блок-схему на фіг. 2. Блоки моделювання і обробки інформації (блоки 7-10) системи 6 розрахунку елементів просторового руху самохідного прив'язного підводного апарата-робота моделюючого комплексу (1) включають комп'ютерні моделі типових елементів самохідного підводного апарата-робота - моделі власне підводного апарата як твердого тіла у потоці води, моделі кабель-троса як гнучкого тіла у потоці води, моделі кабельної лебідки як електромеханічного пристрою, моделі зовнішніх збурень. Блок 7 (блок моделювання і обробки інформації кабельної лебідки) - це комп'ютерна математична модель власне підводного апарата як твердого тіла, що обтікається потоком води й утворює сили гідродинамічного опору Fx,y,z та розвиває упори Rx,y,z за допомогою власних рушіїв (гребних гвинтів) по трьом осям зв'язаної з підводним апаратом системи координат - поздовжній х, вертикальній у та боковій z та має коефіцієнти гідродинамічного опору по цих осях Сх, Су, Cz. Блок 8 (блок моделювання і обробки інформації кабель-троса) - це комп'ютерна математична модель кабель-троса як ідеально гнучкого тіла у потоці води, який являє собою у поперечному перерізі круг з діаметром d та має нормальну й дотичну складові гідродинамічного опору, які характеризуються, відповідно, коефіцієнтами Сn, Сt. Модель забезпечує визначення сил Т, що діють на самохідний підводний апарат-робот зі сторони ходового кінця кабель-троса. Блок 9 (блок моделювання і обробки інформації самохідного прив'язного підводного апаратаробота) - це комп'ютерна математична модель кабельної лебідки як електромеханічного пристрою, що забезпечує керовану зміну довжини попущеної частини кабель-троса Lкm=f(h,v,uм), де uм - режимний сигнал. Блок 10 (блок моделювання і обробки інформації зовнішніх збурень) - це комп'ютерна математична модель зовнішнього збурення, яка представлена епюрами течії по глибині vv(h). Модель забезпечує врахування збурення при моделюванні кабель-троса та підводного апарата у блоках 7 і 8 (відповідно, у блоці моделювання і обробки інформації кабельної лебідки та у блоці моделювання і обробки інформації кабель-троса) - див. блоксхему на фіг. 2. При розробці структури моделюючого комплексу (1) прийняті наступні загальні припущення, які не викривляють фізики явищ, що протікають в об'єкті дослідження: - вода як робоче середовище розглядається як ідеальна незбурена рідина; - насиченням магнітопроводів електродвигунів та нелінійними залежностями його механічних елементів нехтуємо; 9 64215 - підводний апарат у воді має нульову плавучість; - рух кабель-троса у потоці води представлено як квазістаціонарний рух абсолютно гнучкої нитки, яка має нульову плавучість і у поперечному перерізі є круг. При розробці комп'ютерної математичної моделі блока 7 (блок моделювання і обробки інформації кабельної лебідки) використана загальна форма рівнянь квазістаціонарного руху підводного апарата у припущенні про еліпсоїду форму його корпусу, яка має вигляд: dVx mx dt mz yVz m y zV y Rx ; m dVy m V m V R ; x z x z x z y y dt m dVz m V m V R ; y x y x y x z z dt J d x M ; x x dt d y J y x z J x J z VxVz mx mz M y ; dt d z J z x y J y J x VxV y m y mx M z , dt (1) де mx, my, mz, Jx, Jy, Jz, - маси з приєднаними масами і моменти інерції з приєднаними моментами інерції підводного апарата по осям зв'язаної системи координат відповідно; Rx, Ry, Rz, Мх, Му, Mz - проекції рівнодіючої сил і моментів на осі зв'язаної системи координат відповідно, що діють на самохідний підводний апарат-робот. Сума відповідних складових сил гідродинамічного опору самохідного підводного апарата-робота Fx,y,z та натягу кабель-троса Tx,y,z по осях прийнятої системи координат у квазістаціонарному режимі руху врівноважуються упорами рушіїв самохідного підводного апарата-робота Rx,y,z: Fx Tx Rx ; Fy Ty R y ; Fz Tz Rz , (2) Зв'язок між значеннями упорів Rx,y,z та обертами гребних гвинтів підводного апарата ωГі (керованих величин) як функцій їх конструктивних характеристик визначається з відомих залежностей [8]: 10 Ri K Ti 2 Гі u Гі Di4 / 4 2 , (3) де KТi - безрозмірний коефіцієнт упору i-го гребного гвинта (i=x,y,z); ωГі(uГі) - кутова частота обертання гребного гвинта як керована величина сигналу керування uГі; Di - діаметр i-го гребного гвинта. Сили гідродинамічного опору корпусу підводного апарата Fx,y,z по осях зв'язаної системи координат визначаються відомими залежностями: Fx 0,5C x v x v x S x ; Fy 0,5C y v y v y S y ; Fz 0,5C z v z v z S z , (4) де Cx,y,z - коефіцієнти гідродинамічного опору корпуса по відповідних осях; - питома густина води; vx,y,z - складові вектора швидкості води v vG vV , що набігає на корпус підводного апарата; Sx,y,z - характерний розмір корпусу підводного апарата (площа перерізу) у площинах, перпендикулярних осям x,y,z. Моделювання проекцій моменту гідродинамічного походження на зв'язані осі виконується за наступною формулою: 2 M x, y, z 0,5x, y, z SLkx, y, z , (5) де kx,y,z - коефіцієнти гідродинамічних моментів по відповідних осях; ρ - густина рідини; L - характерна довжина тіла, що обтікається потоком води. Внаслідок встановлення блока плавучості на самохідний підводний апарат-робот виникає момент сили плавучості. Його проекції МАх, МАу, MAz на зв'язані осі розраховуються наступним чином: МАх=-AzA cosψcosθ-AyA cosψsinθ; MAz=AxA cosψcosθ-AyA sinψ; MAy=AxA cosψsinθ+AzA sinψ (6) де A - сила плавучості, xA, yA, zA - координати точки прикладення сили А в зв'язаній системі координат. При розробці комп'ютерної математичної моделі блока 6 використана математична модель кабель-троса, яка визначає сили, які діють на самохідний підводний апарат-робот при його квазістаціонарному русі і описана наступною системою диференціальних рівнянь [2]: 11 64215 dz sin ; dlKT v 2 sin sin d 1 Cn d ; dlKT 2 T dT 1 2 Ct d v cos cos , dlKT 2 dx cos ; dlKT (7) де x - координата елементу кабель-троса по осі абсцис; α - кут між дотичною до елементу KТ і віссю абсцис; z - координата елементу кабельтроса по осі ординат; d - діаметр кабель-троса; Т модуль вектора сили T натягу кабель-троса на його ходовому (нижньому) кінці. При розробці комп'ютерної математичної моделі блока 9 (блок розрахунку елементів просторового руху самохідного прив'язного підводного апарата-робота) врахована квазістаціонарна постановка задачі, яка дає змогу використовувати у якості математичної моделі кабельної лебідки наступні відомі залежності: D M dt; ; 2i M f uM , lKT де D - діаметр кабельного барабана кабельної лебідки; i - загальний коефіцієнт редукції кінематичної схеми кабельної лебідки; ωM - кутова частота обертання привода кабельної лебідки. В якості оператора для завдання початкових умов, розрахунку траєкторій руху та управління роботою всього комплексу виступає дослідник, який генерує задум. Конструктивно і технологічно вихід блока 2 вводу інформації зв'язаний із входом блока 3 моделювання і обробки інформації системи автоматичного керування, вихід блока 3 моделювання і обробки інформації системи автоматичного керування зв'язаний із входом блока 5 аналізу результатів моделювання через систему 6 розрахунку елементів просторового руху самохідного прив'язного підводного апарата-робота, а вихід блока 4 збереження інформації і заданих траєкторій руху зв'язаний із входом блока 2 вводу інформації. Конструктивно перший вихід блока 3 моделювання і обробки інформації системи автоматичного керування зв'язаний із входом блока 5 аналізу результатів моделювання через вхід блока 9 моделювання і обробки інформації самохідного прив'язного підводного апарата-робота, а другий вихід блока 3 моделювання і обробки інформації системи автоматичного керування зв'язаний із входом блока 7 моделювання і обробки інформації кабельної лебідки, які входять до складу системи 6 розрахунку елементів просторового руху самохідного прив'язного підводного апарата-робота (див. блок-схему на фіг. 2). 12 Безпосередньо в системі 6 розрахунку елементів просторового руху самохідного прив'язного підводного апарата-робота вихід блока 7 моделювання і обробки інформації кабельної лебідки зв'язаний з першим входом блока 8 моделювання і обробки інформації кабель-троса, вихід блока 8 моделювання і обробки інформації кабель-троса зв'язаний із другим входом блока 9 моделювання і обробки інформації самохідного прив'язного підводного апарата-робота. Перший вихід блока 10 моделювання і обробки інформації зовнішніх збурень зв'язаний із другим входом блока 8 моделювання і обробки інформації кабель-троса, а другий вихід блока 10 моделювання і обробки інформації зовнішніх збурень зв'язаний із третім входом блока 9 моделювання і обробки інформації самохідного прив'язного підводного апарата-робота (див., відповідно, блок-схему на фіг. 2). Моделюючий комплекс (позиція 1) дослідження/розрахунку просторового руху підводного апарата-робота, що заявляється, працює таким чином (у відповідності до блок-схеми на фіг. 2). Перед початком досліджень із блока 4 збереження інформації і заданих траєкторій руху, де знаходиться бібліотека функцій «елементарних режимів руху» та інших змінних, до блока 2 вводу інформації дослідником вводяться моделі елементарних режимів руху та інформація щодо змінних, що використовуються при організації алгоритмів обчислення параметрів просторового руху. Блок 2 завдає траєкторії руху і формує для блока 3 моделювання і обробки інформації системи автоматичного керування математичний опис векторів зада них швидкості vG t і прискорення v 'G t ПP, а також опис заданих траєкторій руху підводний апарат S(t). Зазначені вхідні дані опрацьовуються у блоці 3 (блок моделювання і обробки інформації системи автоматичного керування) і за результатами обробки формуються інформаційноуправляючі сигнали (uM) на вхід до блока 7 (блок моделювання і обробки інформації кабельної лебідки) та сигнали (uRx, uRy, uRz) на вхід до блока 9 (блок моделювання і обробки інформації самохідного прив'язного підводного апарата-робота). Інформаційний масив отриманий блоком 7 (блок моделювання і обробки інформації кабельної лебідки) в моделі кабельної лебідки обробляється алгоритмами, що формалізують цей електромеханічний пристрій, і за результатами обробки формуються потік масиву інформації до блока 8 (блок моделювання і обробки інформації кабель-троса), що забезпечує керовану зміну довжини попущеної частини кабель-троса lKT f h, v , uM , де uM - режимний сигнал. У зазначеному блоці 8 моделювання і обробки інформації кабель-троса із врахуванням масиву інформації отриманого від блока 7 (блок моделювання і обробки інформації кабельної лебідки) та результатів моделювання впливу на кабель-трос зовнішнього збурення (епюри течії vV h по глибині) на математичній моделі кабельтроса в залежності від його конструктивних параметрів формується результуючий масив інформа 13 ції складових сил гідродинамічного натягу кабельтроса (T). Цей вихідний масив інформації подається на вхід блока 9 моделювання і обробки інформації самохідного прив'язного підводного апаратаробота. У цьому блоці моделювання на математичній моделі власне підводного апарата обробляється отриманий від зазначеного блока 9 масив інформації із врахуванням результатів моделювання на блоках 3 (блок моделювання і обробки інформації системи автоматичного керування) і 8 (блок моделювання і обробки інформації кабельтроса). За результатами обробки зазначеної інформації формується результуючий масив, потік якого направляється до блока 5 аналізу результатів моделювання. Цей блок узагальнює наслідки комп'ютерних розрахунків і формує кінцеві результати досліджень. Таким чином функціонує розроблений моделюючий комплекс, що використовується для дослідження ефективності технологій моніторингу акваторій з застосуванням самохідного прив'язного підводного робота в квазістаціонарному режимі його просторового руху. Підвищення ефективності застосування моделюючого комплексу, який заявляється, у порівнянні із прототипом, досягається шляхом введення до складу комплексу додаткових систем та блоків, що дає можливість забезпечити (при розробці різних складних технічних систем типу самохідних прив'язних підводних апаратів-роботів) врахування елементів штучного інтелекту, здійснити збір та аналіз зовнішньої та внутрішньої системної (параметри і показники роботи технічних засобів нового покоління) інформації, а також сформувати відповідні керуючі команди та потрібне значення інтегрального показника корисних функцій системи в цілому. Підвищення ефективності застосування моделюючого комплексу, який заявляється, у порівнянні із прототипом, досягається також шляхом введення системи розрахунку елементів просто 64215 14 рового руху самохідного прив'язного підводного апарата-робота, яка здійснює незалежну розробку та незалежне регулювання параметрів як апаратаробота, так і кабель-троса, і визначає ефективність функціонування зазначених складних технічних систем в різних режимах експлуатації на морському театрі воєнних дій та безпосередньо при веденні бойових дій. Джерела інформації: 1. Автономные подводные роботы. Системы и технологии. // Под общей ред. М.Д. Агеева. - М.: Наука, 2005. - 398 с. 2. Блинцов B.C. Привязные подводные системы. - К.: Наукова думка, 1998. - 232 с. 3. Литвиненко Е.Я., Илларионов Г.Ю., Сидоренков В.В. Противоминные необитаемые подводные аппараты: Монография. СПб.: Судостроение, 2005. - 108 с. 4. Лукомский Ю.А., Пешехонов В.Г., Скороходов Д.А. Навигация и управление движением судов. Учебник. - СПб.: «Элмор», 2002. - 360 с. 5. С.А. Саркисян, В.М. Ахундов, Э.С. Минаев «Большие технические системы: анализ и прогноз развития». Издательство «Наука», М., 1977, стор. 24-245. 6. А.Н. Воронин, Ю.К. Зиатдинов, А.В. Харченко, В.В. Осташевский «Сложные технические и эргатические системы: методы исследования». /Институт космических исследований НАНУ-НКАУ, Научный центр Военно-Воздушных Сил. Монография. - Харьков: Издательство «Факт», 1997., стор. 151-153, мал. 3.2.2 та 3.2.3 - аналог. 7. Блінцов B.C., Буруніна Ж.Ю., Нгуен Тьєн Лонг. Програмно-технічний комплекс для морських дослідницьких випробувань одно ланкових підводних буксируваних систем. // Зб. Наук. Праць НУК. Миколаїв: НУК. 2005. - № 3. - с. 30-38. - прототип. 8. Справочник по теории корабля: В 3-х т. / Под ред. Я.И. Войткунского. - Л.: Судостроение, 1985. - Т. 3: Управляемость водоизмещающих судов. - 544 с. 15 Комп’ютерна верстка Л.Литвиненко 64215 Підписне 16 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюModeling system for study/calculation of spatial motion of undersea robot
Автори англійськоюKyryziuk Oleksandr Mykolaiovych
Назва патенту російськоюМоделирующий комплекс для исследования/расчета пространственного движения подводного аппарата-робота
Автори російськоюКиризюк Александр Николаевич
МПК / Мітки
МПК: B63G 8/00, H01B 11/00, H01B 7/14, B63C 7/00
Мітки: моделюючий, підводного, апарата-робота, комплекс, просторового, руху
Код посилання
<a href="https://ua.patents.su/8-64215-modelyuyuchijj-kompleks-dlya-doslidzhennya-rozrakhunku-prostorovogo-rukhu-pidvodnogo-aparata-robota.html" target="_blank" rel="follow" title="База патентів України">Моделюючий комплекс для дослідження/розрахунку просторового руху підводного апарата-робота</a>
Пристрій для просторового вимірювання швидкості та напряму руху водного потоку
Номер патенту: 96242
Опубліковано: 10.10.2011
Автори: Гладких Ігор Іванович, Бурачек Всеволод Германович, Сємака Олексій Миколайович
МПК: G01P 5/00
Мітки: просторового, вимірювання, пристрій, водного, потоку, напряму, швидкості, руху
Формула / Реферат:
Пристрій для просторового вимірювання швидкості та напряму руху водного потоку відносно підводного апарата, що містить випромінювачі і приймачі ультразвукового випромінювання, електронні засоби обробки інформації, який відрізняється тим, що він має шість ультразвукових блоків: два випромінювачі і чотири приймачі, які установлені в трьох взаємно перпендикулярних площинах так, що у горизонтальній та вертикальній площині траєкторії...
Крено-диферентна система підводного апарата
Номер патенту: 22439
Опубліковано: 25.04.2007
Автори: Бугаєнко Борис Андрійович, Блінцов Володимир Степанович, Дубіна Марина Олександрівна, Галь Анатолій Феодосійович
МПК: B63B 39/00, B63B 43/00, B63B 13/00
Мітки: підводного, система, крено-диферентна, апарата
Формула / Реферат:
Крено-диферентна система підводного апарата, що містить цистерни, розташовані в кормі і носі, з лівого і правого борту в легкому корпусі підводного апарата, сполучені між собою трубопроводами з насосами і запірними елементами, яка відрізняється тим, що цистерни розділені пружними мембранами на верхні і нижні порожнини, причому у верхній порожнині розміщені елементи позитивної плавучості у вигляді міцних порожнистих куль, наповнених легким...
Рушійний пристрій для підводного робота

Номер патенту: 27504
Опубліковано: 12.11.2007
Автори: Данильченко Ігор Євгенович, Данильченко Наталя В'ячеславівна, Родічева Надія Іванівна, Пишнєв Сергій Миколайович
МПК: B63H 20/00
Мітки: підводного, рушійній, пристрій, робота
Формула / Реферат:
1. Рушійний пристрій для підводного робота, що містить корпус з розташованим всередині електродвигуном із знижувальним редуктором і ведучим валом, гребні гвинти, встановлені на гребних валах і розміщені в насадці, який відрізняється тим, що гребні вали розміщені перпендикулярно до ведучого вала і з'єднані з останнім за допомогою конічної передачі, при цьому корпус електродвигуна закріплений зовні насадки.2. Рушійний пристрій за...
Моделюючий комплекс бойового застосування авіаційної високоточної зброї
Номер патенту: 2964
Опубліковано: 15.09.2004
Автори: Неділько Олександр Миколаєвич, Толубко Володимир Борисович, Федотов Іван Наумович, Мартинов Вячеслав Станіславович, Петін Олександр Петрович, Комаров Володимир Олександрович, Семон Богдан Йосипович, Абаляєв Сергій Іванович, Майстров Олексій Олексійович
МПК: G09B 9/02, G02B 9/00, H04N 5/72
Мітки: високоточної, авіаційної, бойового, зброї, комплекс, застосування, моделюючий
Формула / Реферат:
1. Моделюючий комплекс бойового застосування авіаційної високоточної зброї, що містить макет кабіни літака з робочими місцями членів екіпажу, імітатори органів керування літаком та його обладнанням, дошку приладів з імітаторами пілотажних приладів, імітатор прицільно-навігаційної системи літака з органами керування, імітатором бортового оптико-коліматорного прицілу та телевізійним індикатором, імітатор системи керування озброєнням літака з...
Система автоматичного керування глибиною підводного апарата
Номер патенту: 4782
Опубліковано: 15.02.2005
Автор: Блінцов Сергій Володимирович
МПК: B63G 8/00
Мітки: апарата, глибиною, підводного, керування, система, автоматичного
Формула / Реферат:
Система автоматичного керування глибиною підводного апарата, що містить програмний пристрій, датчики глибини (висоти над ґрунтом) та вертикальної швидкості, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що в ній додатково введено суматор, зв'язаний з датчиком глибини (висоти над ґрунтом) та програмним пристроєм, апроксиматор залежності гальмівного...
Попередній патент: Комплект для тренування м’язів шиї
Наступний патент: Спосіб виробництва антифризів
Випадковий патент: Пристрій для підвищення надійності та економічності електропостачання приймачів