Астатична система керування з заданою динамічною похибкою та скороченою тривалістю перехідного процесу
Номер патенту: 74965
Опубліковано: 12.11.2012
Автори: Олійник Павло Борисович, Іванов Сергій Вікторович, Тєут Василь Михайлович


Формула / Реферат
Астатична система автоматичного керування з заданою величиною динамічної похибки та скороченою тривалістю перехідного процесу, зі змінною структурою з перемиканням між двома регуляторами, що містить задавальний пристрій, блок порівняння, до прямого входу якого приєднано вихід задавального пристрою, об'єкт керування, датчик вихідного сигналу об'єкта керування, вхід якого приєднано до виходу об'єкта керування, а вихід - до інверсного входу блока порівняння, та два регулятори, яка відрізняється тим, що містить два регулятори однакової структури, перший з великим часом перехідного процесу та другий з малим часом перехідного процесу, з'єднані паралельно та підключені входами до виходу блока порівняння, логічний пристрій з комутатором, до першого і другого входу якого приєднано виходи першого та другого регуляторів відповідно, до третього - вихід задавального пристрою, а до четвертого - вихід датчика вихідного сигналу об'єкта керування, а вхід об'єкта керування приєднано до виходу логічного пристрою з комутатором.
Текст
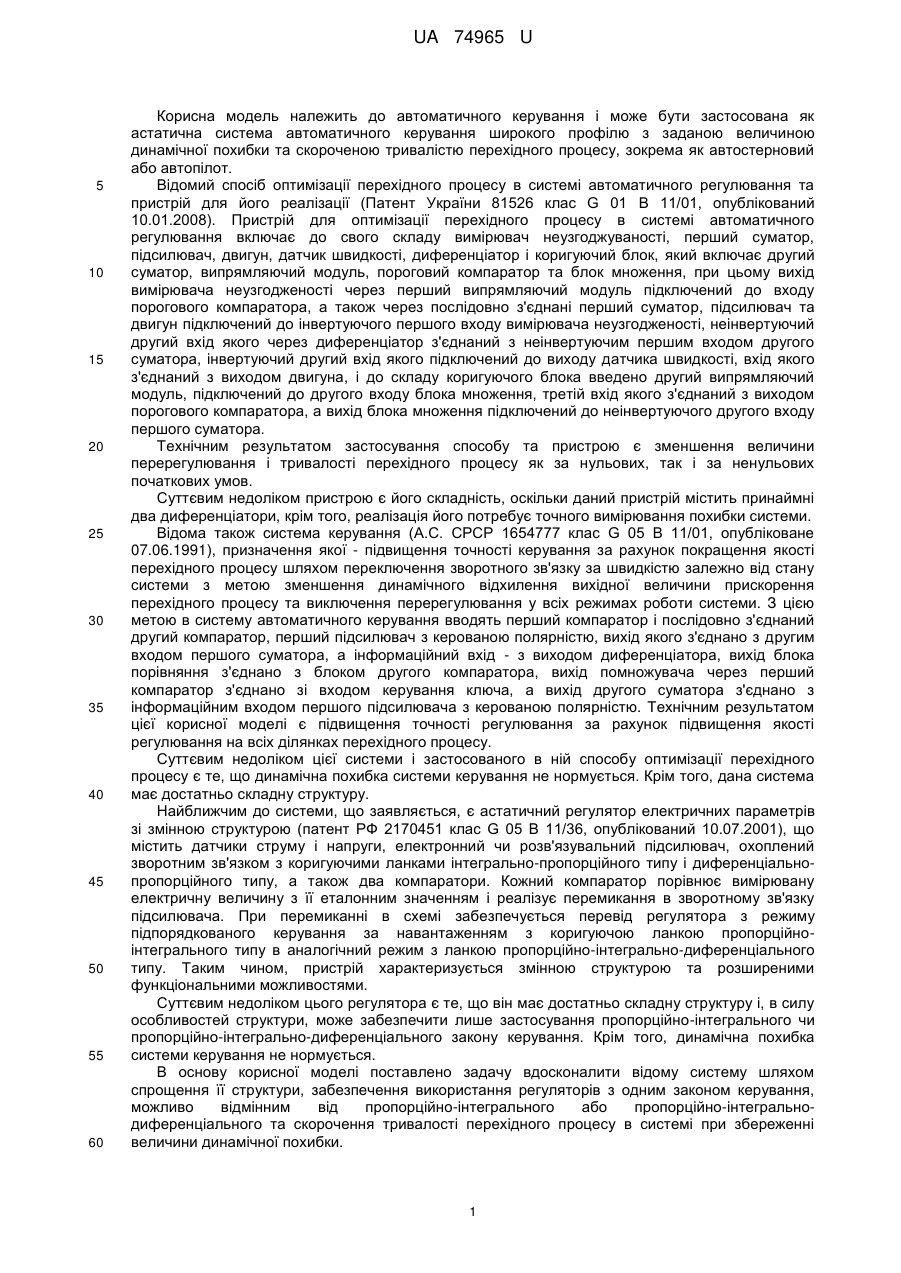
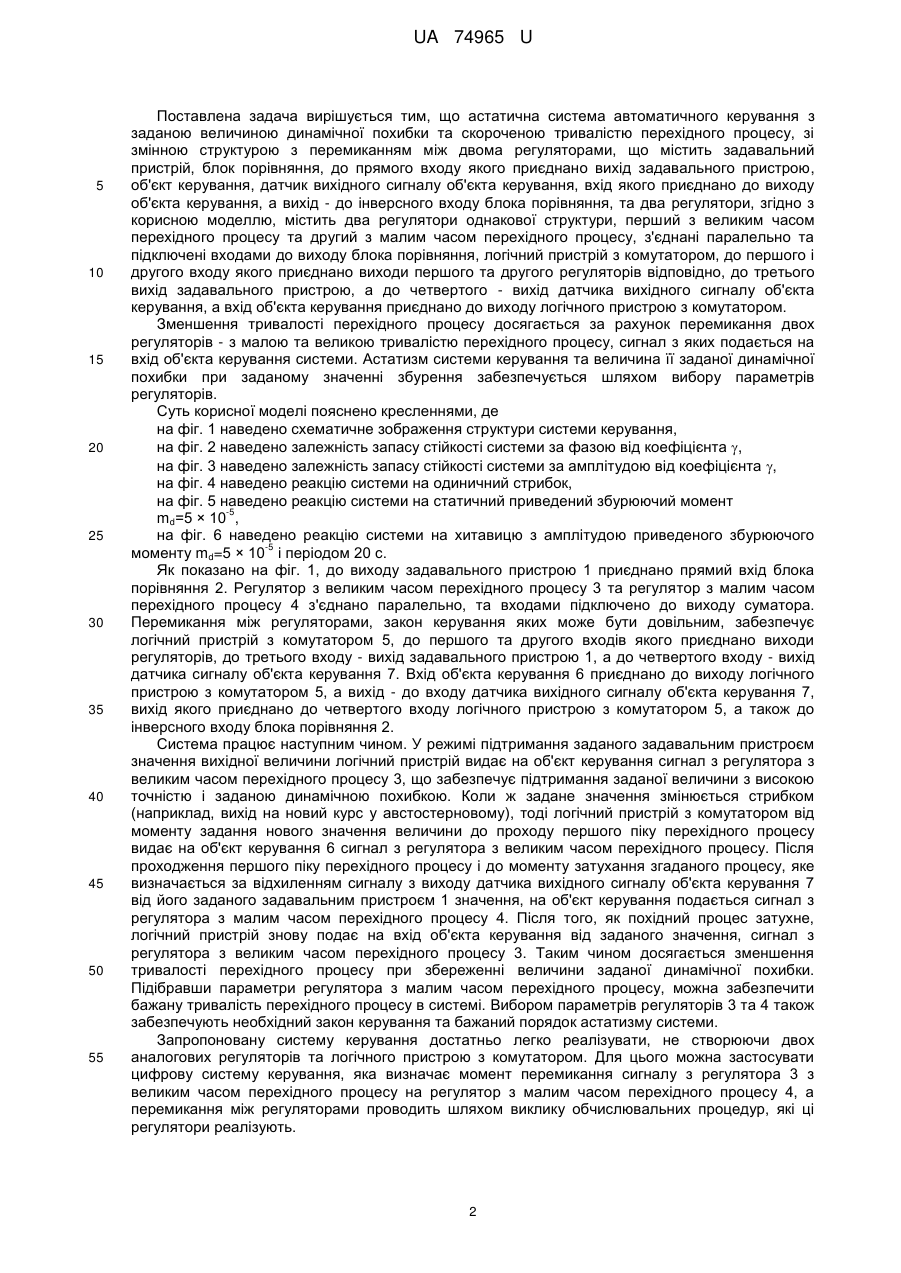
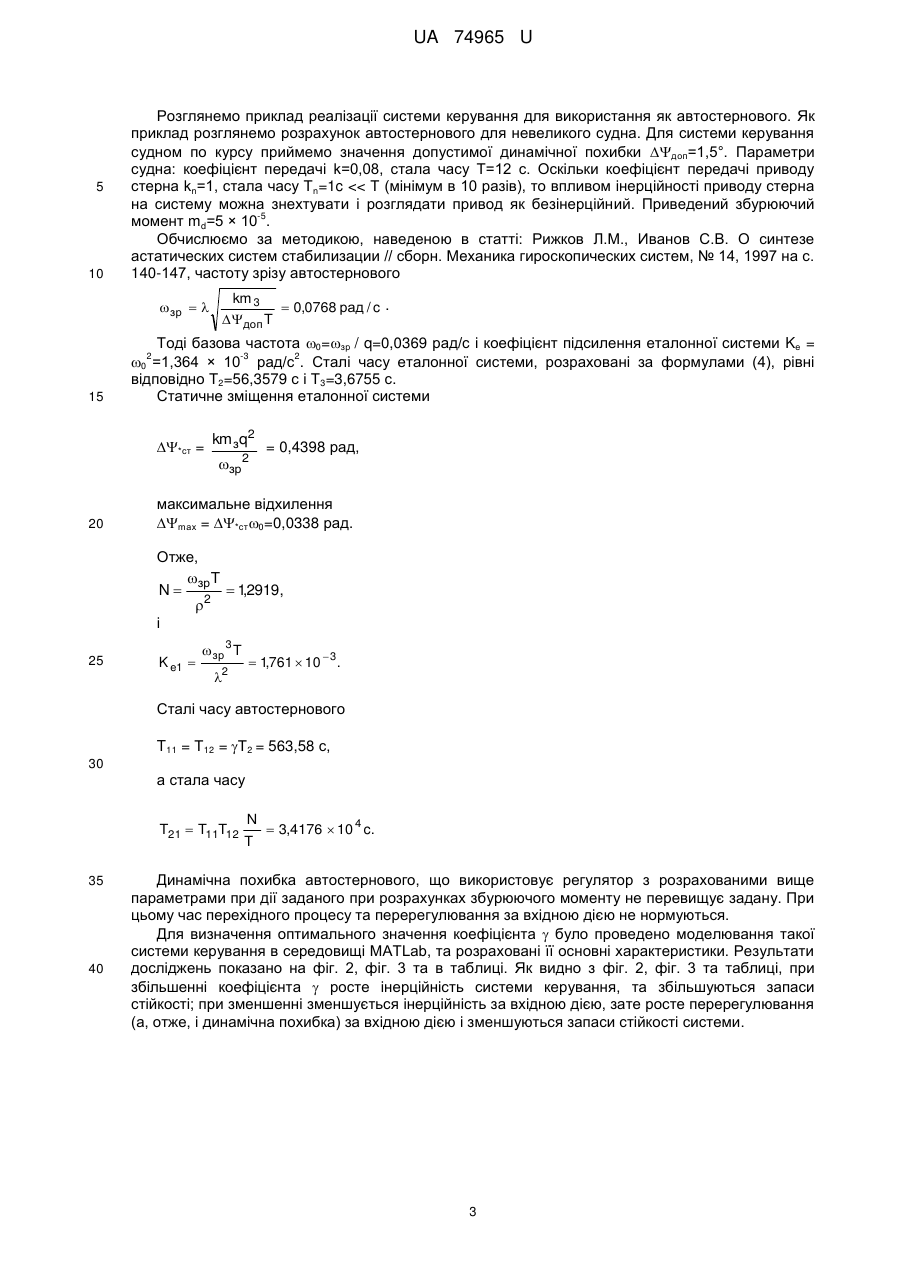
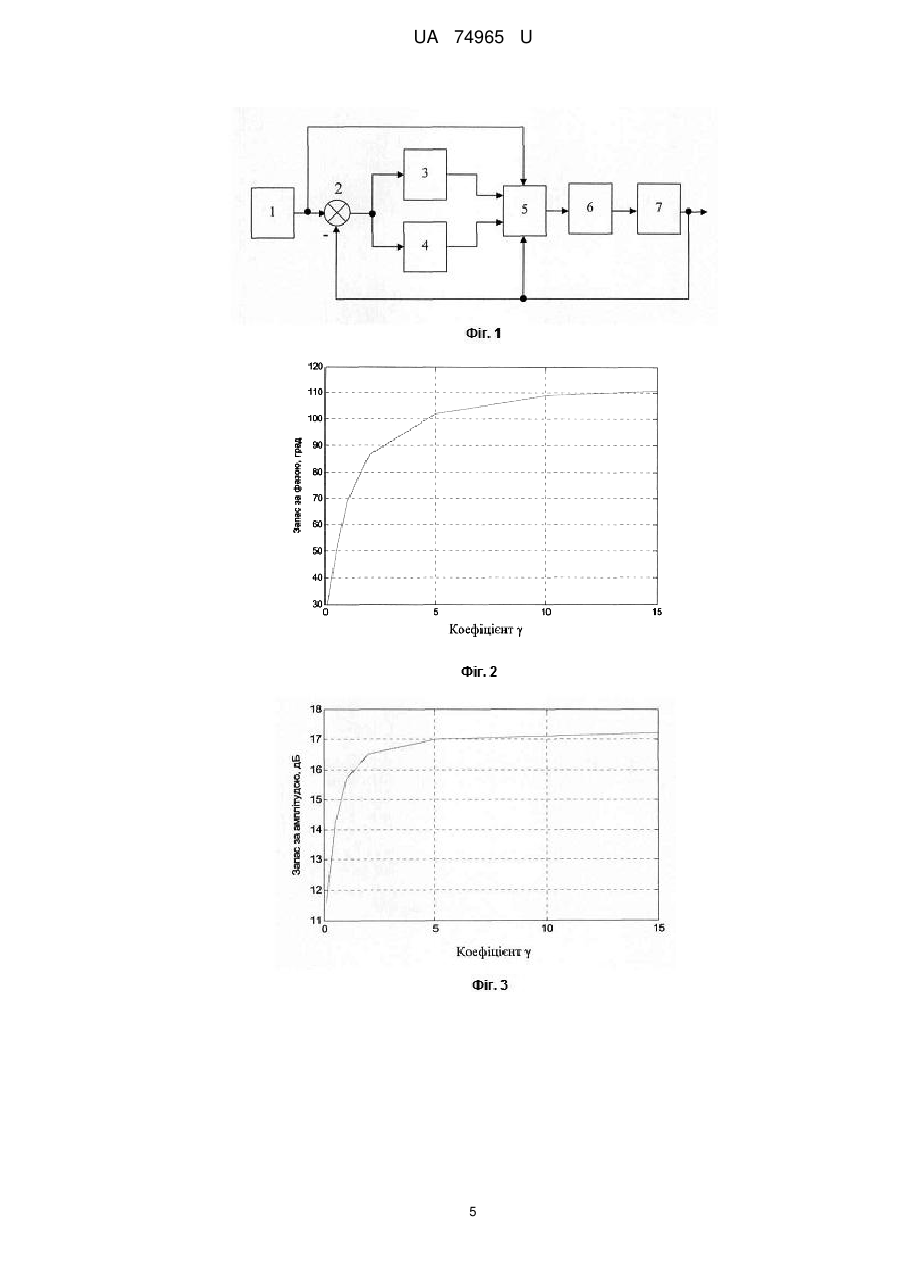
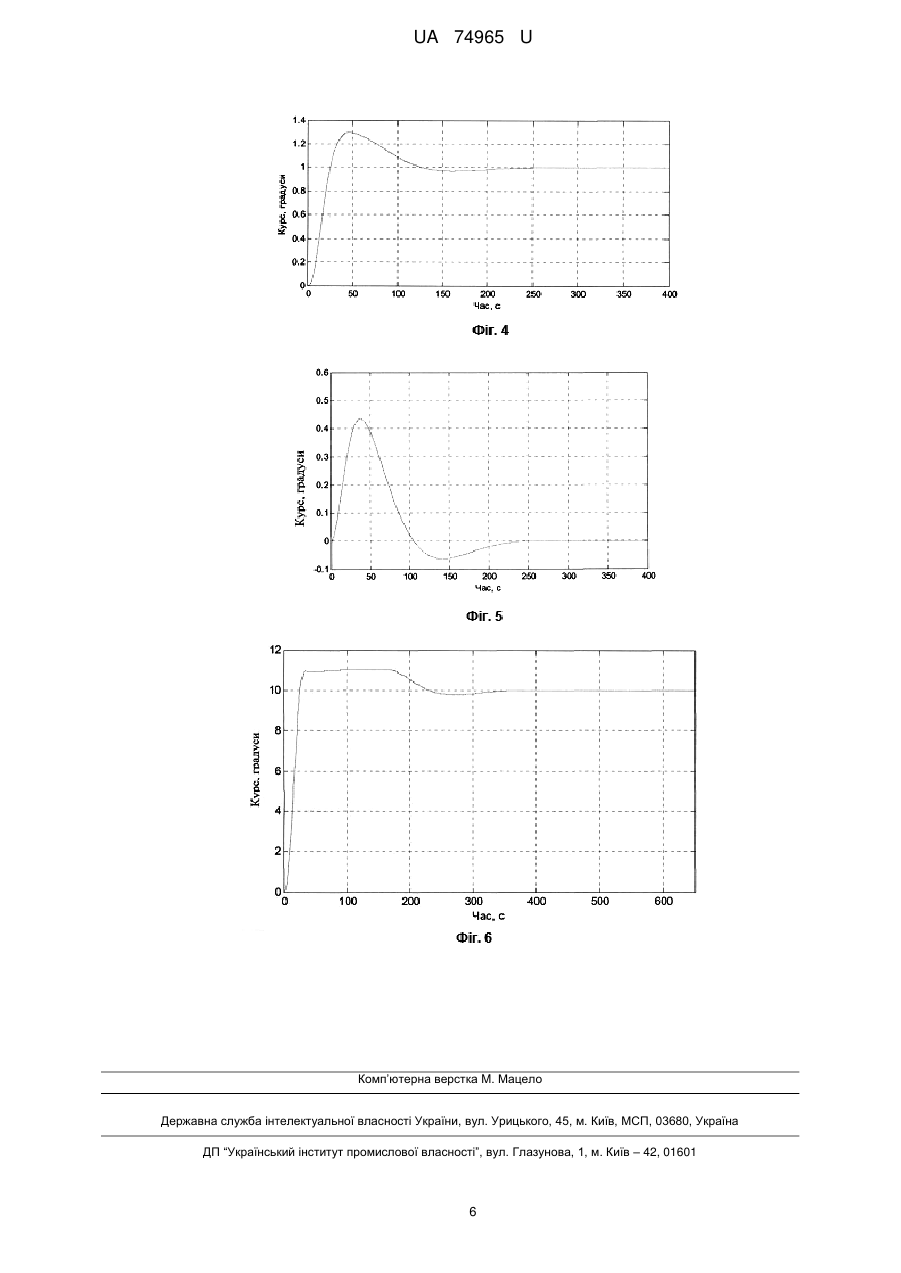
Реферат: Астатична система автоматичного керування з заданою величиною динамічної похибки та скороченою тривалістю перехідного процесу, зі змінною структурою з перемиканням між двома регуляторами містить задавальний пристрій, блок порівняння, об'єкт керування, датчик вихідного сигналу об'єкта керування, два регулятори. Два регулятори виконані однакової структури, перший - з великим часом перехідного процесу та другий - з малим часом перехідного процесу. UA 74965 U (12) UA 74965 U UA 74965 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до автоматичного керування і може бути застосована як астатична система автоматичного керування широкого профілю з заданою величиною динамічної похибки та скороченою тривалістю перехідного процесу, зокрема як автостерновий або автопілот. Відомий спосіб оптимізації перехідного процесу в системі автоматичного регулювання та пристрій для його реалізації (Патент України 81526 клас G 01 В 11/01, опублікований 10.01.2008). Пристрій для оптимізації перехідного процесу в системі автоматичного регулювання включає до свого складу вимірювач неузгоджуваності, перший суматор, підсилювач, двигун, датчик швидкості, диференціатор і коригуючий блок, який включає другий суматор, випрямляючий модуль, пороговий компаратор та блок множення, при цьому вихід вимірювача неузгодженості через перший випрямляючий модуль підключений до входу порогового компаратора, а також через послідовно з'єднані перший суматор, підсилювач та двигун підключений до інвертуючого першого входу вимірювача неузгодженості, неінвертуючий другий вхід якого через диференціатор з'єднаний з неінвертуючим першим входом другого суматора, інвертуючий другий вхід якого підключений до виходу датчика швидкості, вхід якого з'єднаний з виходом двигуна, і до складу коригуючого блока введено другий випрямляючий модуль, підключений до другого входу блока множення, третій вхід якого з'єднаний з виходом порогового компаратора, а вихід блока множення підключений до неінвертуючого другого входу першого суматора. Технічним результатом застосування способу та пристрою є зменшення величини перерегулювання і тривалості перехідного процесу як за нульових, так і за ненульових початкових умов. Суттєвим недоліком пристрою є його складність, оскільки даний пристрій містить принаймні два диференціатори, крім того, реалізація його потребує точного вимірювання похибки системи. Відома також система керування (А.С. СРСР 1654777 клас G 05 В 11/01, опубліковане 07.06.1991), призначення якої - підвищення точності керування за рахунок покращення якості перехідного процесу шляхом переключення зворотного зв'язку за швидкістю залежно від стану системи з метою зменшення динамічного відхилення вихідної величини прискорення перехідного процесу та виключення перерегулювання у всіх режимах роботи системи. З цією метою в систему автоматичного керування вводять перший компаратор і послідовно з'єднаний другий компаратор, перший підсилювач з керованою полярністю, вихід якого з'єднано з другим входом першого суматора, а інформаційний вхід - з виходом диференціатора, вихід блока порівняння з'єднано з блоком другого компаратора, вихід помножувача через перший компаратор з'єднано зі входом керування ключа, а вихід другого суматора з'єднано з інформаційним входом першого підсилювача з керованою полярністю. Технічним результатом цієї корисної моделі є підвищення точності регулювання за рахунок підвищення якості регулювання на всіх ділянках перехідного процесу. Суттєвим недоліком цієї системи і застосованого в ній способу оптимізації перехідного процесу є те, що динамічна похибка системи керування не нормується. Крім того, дана система має достатньо складну структуру. Найближчим до системи, що заявляється, є астатичний регулятор електричних параметрів зі змінною структурою (патент РФ 2170451 клас G 05 В 11/36, опублікований 10.07.2001), що містить датчики струму і напруги, електронний чи розв'язувальний підсилювач, охоплений зворотним зв'язком з коригуючими ланками інтегрально-пропорційного типу і диференціальнопропорційного типу, а також два компаратори. Кожний компаратор порівнює вимірювану електричну величину з її еталонним значенням і реалізує перемикання в зворотному зв'язку підсилювача. При перемиканні в схемі забезпечується перевід регулятора з режиму підпорядкованого керування за навантаженням з коригуючою ланкою пропорційноінтегрального типу в аналогічний режим з ланкою пропорційно-інтегрально-диференціального типу. Таким чином, пристрій характеризується змінною структурою та розширеними функціональними можливостями. Суттєвим недоліком цього регулятора є те, що він має достатньо складну структуру і, в силу особливостей структури, може забезпечити лише застосування пропорційно-інтегрального чи пропорційно-інтегрально-диференціального закону керування. Крім того, динамічна похибка системи керування не нормується. В основу корисної моделі поставлено задачу вдосконалити відому систему шляхом спрощення її структури, забезпечення використання регуляторів з одним законом керування, можливо відмінним від пропорційно-інтегрального або пропорційно-інтегральнодиференціального та скорочення тривалості перехідного процесу в системі при збереженні величини динамічної похибки. 1 UA 74965 U 5 10 15 20 25 30 35 40 45 50 55 Поставлена задача вирішується тим, що астатична система автоматичного керування з заданою величиною динамічної похибки та скороченою тривалістю перехідного процесу, зі змінною структурою з перемиканням між двома регуляторами, що містить задавальний пристрій, блок порівняння, до прямого входу якого приєднано вихід задавального пристрою, об'єкт керування, датчик вихідного сигналу об'єкта керування, вхід якого приєднано до виходу об'єкта керування, а вихід - до інверсного входу блока порівняння, та два регулятори, згідно з корисною моделлю, містить два регулятори однакової структури, перший з великим часом перехідного процесу та другий з малим часом перехідного процесу, з'єднані паралельно та підключені входами до виходу блока порівняння, логічний пристрій з комутатором, до першого і другого входу якого приєднано виходи першого та другого регуляторів відповідно, до третього вихід задавального пристрою, а до четвертого - вихід датчика вихідного сигналу об'єкта керування, а вхід об'єкта керування приєднано до виходу логічного пристрою з комутатором. Зменшення тривалості перехідного процесу досягається за рахунок перемикання двох регуляторів - з малою та великою тривалістю перехідного процесу, сигнал з яких подається на вхід об'єкта керування системи. Астатизм системи керування та величина її заданої динамічної похибки при заданому значенні збурення забезпечується шляхом вибору параметрів регуляторів. Суть корисної моделі пояснено кресленнями, де на фіг. 1 наведено схематичне зображення структури системи керування, на фіг. 2 наведено залежність запасу стійкості системи за фазою від коефіцієнта , на фіг. 3 наведено залежність запасу стійкості системи за амплітудою від коефіцієнта , на фіг. 4 наведено реакцію системи на одиничний стрибок, на фіг. 5 наведено реакцію системи на статичний приведений збурюючий момент -5 md=5 × 10 , на фіг. 6 наведено реакцію системи на хитавицю з амплітудою приведеного збурюючого -5 моменту md=5 × 10 і періодом 20 с. Як показано на фіг. 1, до виходу задавального пристрою 1 приєднано прямий вхід блока порівняння 2. Регулятор з великим часом перехідного процесу 3 та регулятор з малим часом перехідного процесу 4 з'єднано паралельно, та входами підключено до виходу суматора. Перемикання між регуляторами, закон керування яких може бути довільним, забезпечує логічний пристрій з комутатором 5, до першого та другого входів якого приєднано виходи регуляторів, до третього входу - вихід задавального пристрою 1, а до четвертого входу - вихід датчика сигналу об'єкта керування 7. Вхід об'єкта керування 6 приєднано до виходу логічного пристрою з комутатором 5, а вихід - до входу датчика вихідного сигналу об'єкта керування 7, вихід якого приєднано до четвертого входу логічного пристрою з комутатором 5, а також до інверсного входу блока порівняння 2. Система працює наступним чином. У режимі підтримання заданого задавальним пристроєм значення вихідної величини логічний пристрій видає на об'єкт керування сигнал з регулятора з великим часом перехідного процесу 3, що забезпечує підтримання заданої величини з високою точністю і заданою динамічною похибкою. Коли ж задане значення змінюється стрибком (наприклад, вихід на новий курс у австостерновому), тоді логічний пристрій з комутатором від моменту задання нового значення величини до проходу першого піку перехідного процесу видає на об'єкт керування 6 сигнал з регулятора з великим часом перехідного процесу. Після проходження першого піку перехідного процесу і до моменту затухання згаданого процесу, яке визначається за відхиленням сигналу з виходу датчика вихідного сигналу об'єкта керування 7 від його заданого задавальним пристроєм 1 значення, на об'єкт керування подається сигнал з регулятора з малим часом перехідного процесу 4. Після того, як похідний процес затухне, логічний пристрій знову подає на вхід об'єкта керування від заданого значення, сигнал з регулятора з великим часом перехідного процесу 3. Таким чином досягається зменшення тривалості перехідного процесу при збереженні величини заданої динамічної похибки. Підібравши параметри регулятора з малим часом перехідного процесу, можна забезпечити бажану тривалість перехідного процесу в системі. Вибором параметрів регуляторів 3 та 4 також забезпечують необхідний закон керування та бажаний порядок астатизму системи. Запропоновану систему керування достатньо легко реалізувати, не створюючи двох аналогових регуляторів та логічного пристрою з комутатором. Для цього можна застосувати цифрову систему керування, яка визначає момент перемикання сигналу з регулятора 3 з великим часом перехідного процесу на регулятор з малим часом перехідного процесу 4, а перемикання між регуляторами проводить шляхом виклику обчислювальних процедур, які ці регулятори реалізують. 2 UA 74965 U 5 10 Розглянемо приклад реалізації системи керування для використання як автостернового. Як приклад розглянемо розрахунок автостернового для невеликого судна. Для системи керування судном по курсу приймемо значення допустимої динамічної похибки доп=1,5°. Параметри судна: коефіцієнт передачі k=0,08, стала часу T=12 с. Оскільки коефіцієнт передачі приводу стерна kn=1, стала часу Tn=1c
ДивитисяДодаткова інформація
Назва патенту англійськоюAstatic system for automatic control with set value of dynamic error and short changeover time
Автори англійськоюIvanov Serhii Viktorovych, Oliinyk Pavlo Borysovych, Teut Vasyl Mykhailovych
Назва патенту російськоюАстатическая система управления с заданной динамической погрешностью и сокращенной продолжительностью переходного процесса
Автори російськоюИванов Сергей Викторович, Олийнык Павел Борисович, Теут Василий Михайлович
МПК / Мітки
МПК: G05B 11/01, G05D 1/02
Мітки: скороченою, астатична, перехідного, похибкою, динамічною, заданою, тривалістю, процесу, керування, система
Код посилання
<a href="https://ua.patents.su/8-74965-astatichna-sistema-keruvannya-z-zadanoyu-dinamichnoyu-pokhibkoyu-ta-skorochenoyu-trivalistyu-perekhidnogo-procesu.html" target="_blank" rel="follow" title="База патентів України">Астатична система керування з заданою динамічною похибкою та скороченою тривалістю перехідного процесу</a>
Спосіб оптимізації перехідного процесу в системі автоматичного регулювання та пристрій для його реалізації
Номер патенту: 81526
Опубліковано: 10.01.2008
Автори: Стеба Олександр Михайлович, Мотуз Георгій Іванович, Кралін Володимир Всеволодович, Корсун Валентин Петрович
МПК: G05B 11/01
Мітки: системі, регулювання, автоматичного, оптимізації, перехідного, реалізації, процесу, пристрій, спосіб
Формула / Реферат:
1. Спосіб оптимізації перехідного процесу в системі автоматичного регулювання, що базується на формуванні коректуючого сигналу за умов стрибкоподібної зміни координати вхідної дії, який відрізняється тим, що формують перший сигнал, пропорційний різниці похідних вхідної і вихідної дії системи автоматичного регулювання, та другий сигнал, пропорційний модулю різниці похідних вхідної і вихідної дії системи автоматичного регулювання, та сигнал,...
Спосіб оптимізації перехідного процесу у системі автоматичного регулювання та пристрій для його реалізації
Номер патенту: 62734
Опубліковано: 15.08.2005
Автори: Старков Юрій Володимирович, Мотуз Георгій Іванович, Кралін Володимир Всеволодович, Демченко Леонтій Іванович, Корсун Валентин Петрович
МПК: G05B 11/00, G05B 11/01
Мітки: системі, спосіб, автоматичного, пристрій, регулювання, перехідного, реалізації, процесу, оптимізації
Формула / Реферат:
Засіб для лікування і профілактики гострих респіраторних хвороб молодняку сільськогосподарських тварин містить тримекаїн, наповнювач, розчинник. Додатково засіб містить тимол, хладон, як наповнювач - гліцерин, як розчинник- спирт етиловий.
Система керування об’єктом із запізнюванням
Номер патенту: 34774
Опубліковано: 15.03.2001
Автори: Ткачов Роман Юрійович, Жиляков Віктор Іванович
МПК: G05B 13/02
Мітки: керування, запізнюванням, об'єктом, система
Формула / Реферат:
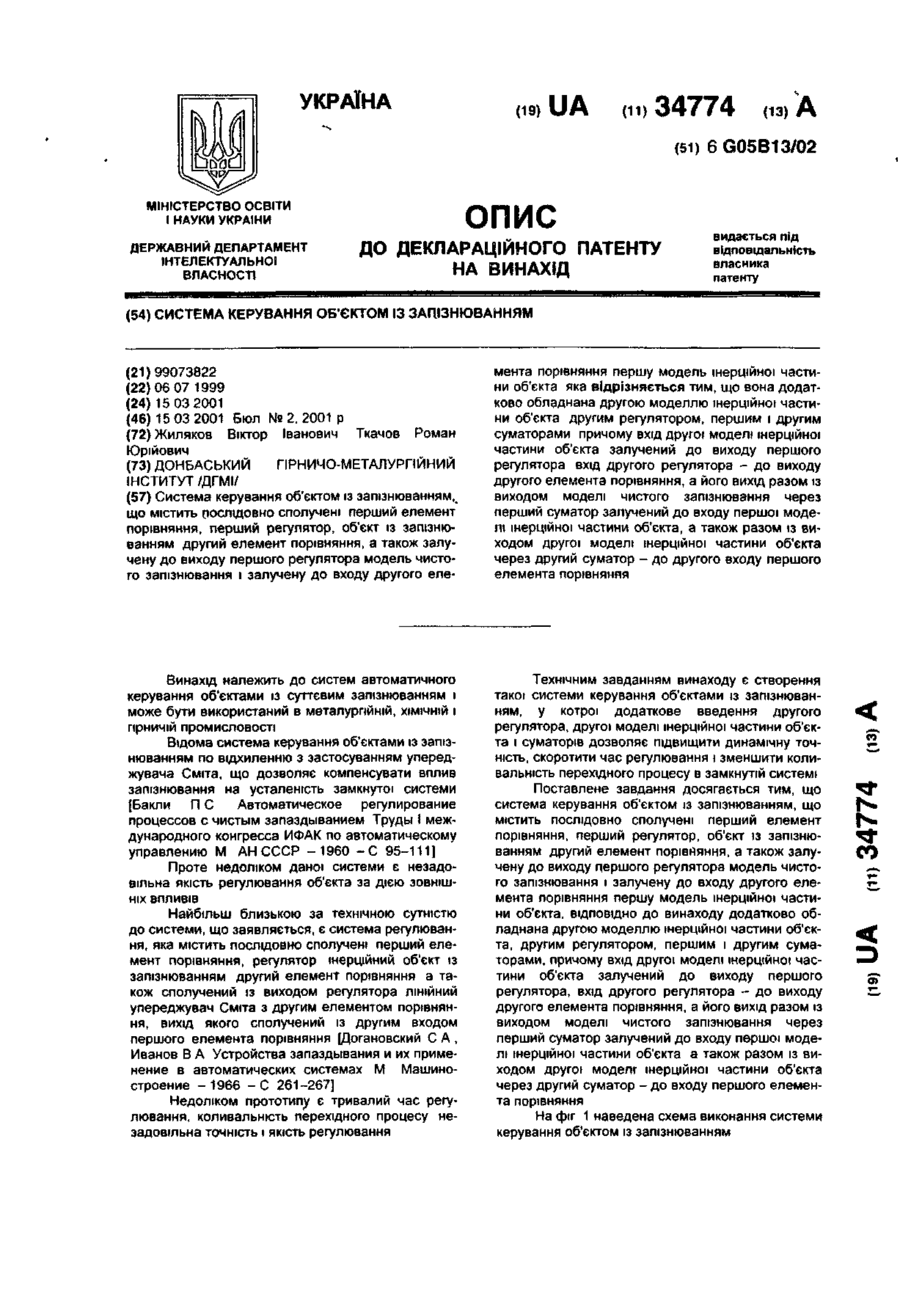
Система керування об'єктом із запізнюванням, що містить послідовно сполучені: перший елемент порівняння, перший регулятор, об'єкт із запізнюванням, другий елемент порівняння, а також залучену до виходу першого регулятора модель чистого запізнювання і залучену до входу другого елемента порівняння першу модель інерційної частини об'єкта, яка відрізняється тим, що вона додатково обладнана другою моделлю інерційної частини об'єкта, другим...
Система керування безпілотним літальним апаратом
Номер патенту: 58103
Опубліковано: 25.03.2011
Автори: Прийменко Катерина Сергіївна, Фірсов Сергій Миколайович, Нгуєн Ван Тхінь, Кулік Анатолій Степанович, Данченко Олександр Вячеславович
МПК: B64C 21/00
Мітки: керування, безпілотним, апаратом, система, літальним
Формула / Реферат:
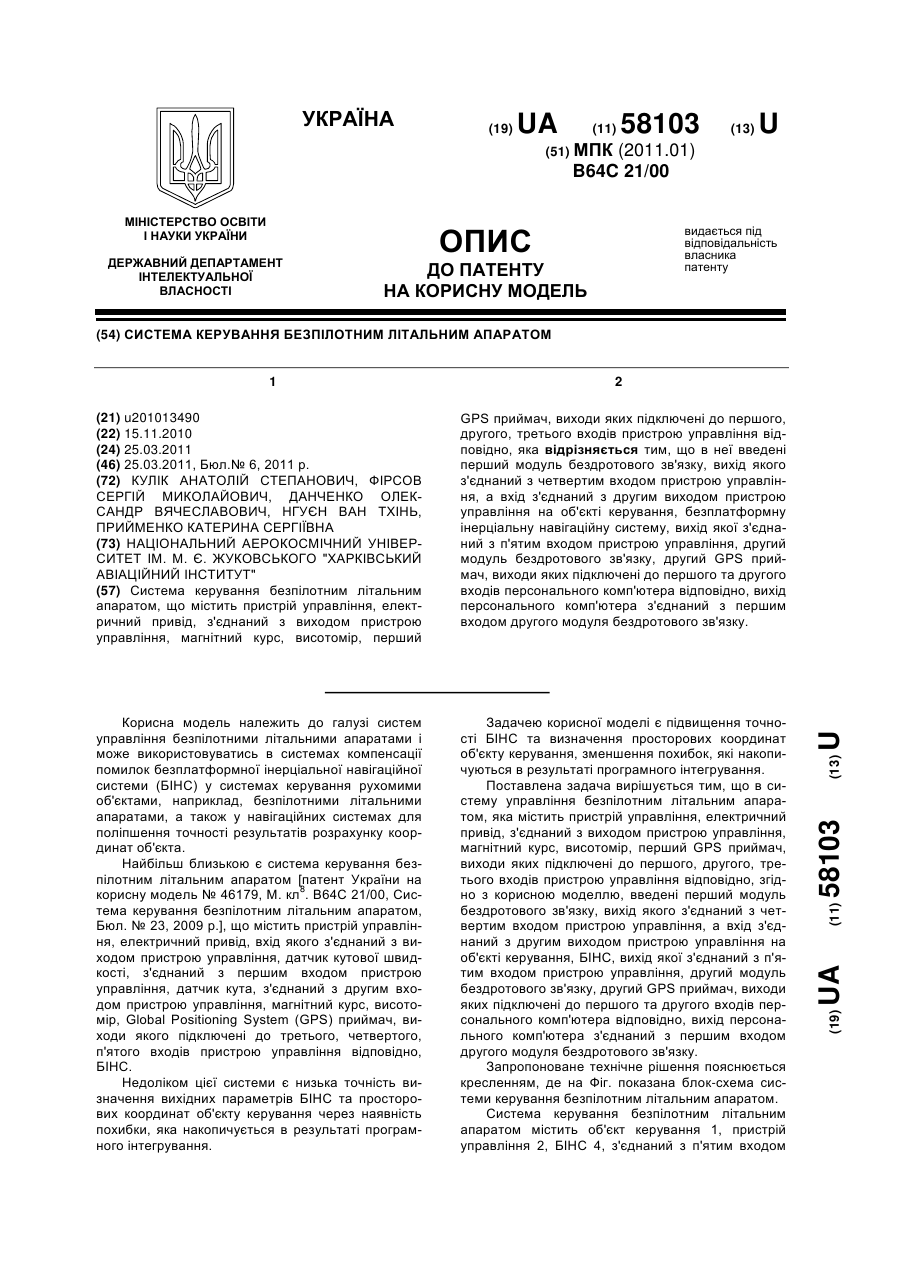
Система керування безпілотним літальним апаратом, що містить пристрій управління, електричний привід, з'єднаний з виходом пристрою управління, магнітний курс, висотомір, перший GPS приймач, виходи яких підключені до першого, другого, третього входів пристрою управління відповідно, яка відрізняється тим, що в неї введені перший модуль бездротового зв'язку, вихід якого з'єднаний з четвертим входом пристрою управління, а вхід з'єднаний з другим...
Спосіб виявлення пошкодження в мережі змінного струму на початковій фазі перехідного процесу
Номер патенту: 20454
Опубліковано: 15.07.1997
Автори: Шелепетень Теодор Михайлович, Сабадаш Ігор Олександрович
МПК: H03K 17/56, H02H 3/08
Мітки: початковій, змінного, пошкодження, виявлення, струму, спосіб, фазі, перехідного, мережі, процесу
Формула / Реферат:
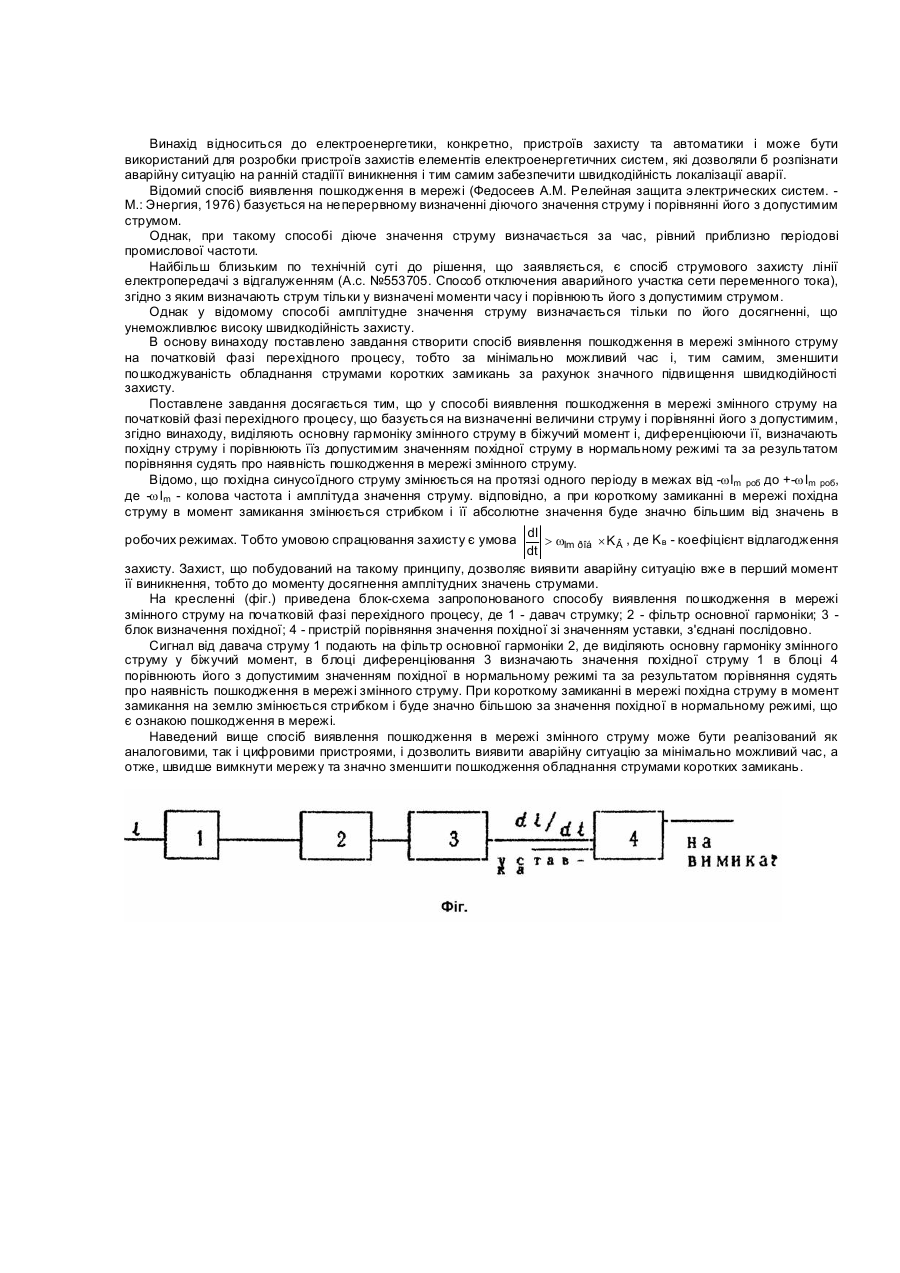
Спосіб виявлення пошкодження в мережі змінного струму на початковій фазі перехідного процесу, що базується на визначенні величини струму і порівнянні його з допустимим, який відрізняється тим, що виділяють основну гармоніку змінного струму в біжучий момент, диференціюють її і визначають значення похідної струму та порівнюють з допустимим значенням похідної струму в нормальному режимі та за результатом порівняння судять про наявність...
Попередній патент: Спосіб побудови ізоліній на областях довільної форми
Наступний патент: Затиск шлейфовий “шс-dпр”
Випадковий патент: Ложка для приготування та перемішування напоїв