Багатокомпонентний чутливий елемент інерціального датчика
Формула / Реферат
Багатокомпонентний чутливий елемент інерціального датчика, що містить шість активних електромагнітних підвісів, кожен з яких оснащений парою електромагнітів, з чутливими компонентами на змінному струмі, виконаними із матеріалу з високою магнітною проникністю та закріпленими на хрестовині, яку виконано із матеріалу з високою жорсткістю, малою вагою, стабільним температурним коефіцієнтом, так що площини чутливих компонентів орієнтовані перпендикулярно до відповідної осі хрестовини, і забезпечені зовнішніми зворотними зв'язками з індуктивними датчиками, який відрізняється тим, що застосовано електромагнітні підвіси, кожний з яких додатково містить пару електромагнітів, що зорієнтовані взаємоперпендикулярно в одній площині, і у яких чутливі компоненти виконані у вигляді кільцевих осердь статорів з вирізами, для забезпечення паралельного і однакового по товщині магнітного зазору, і роторів, розміщених в одній площині зі статорами, а кожен із шести зовнішніх зворотних зв'язків містить пару котушок компенсації та збудження на осерді статора.
Текст
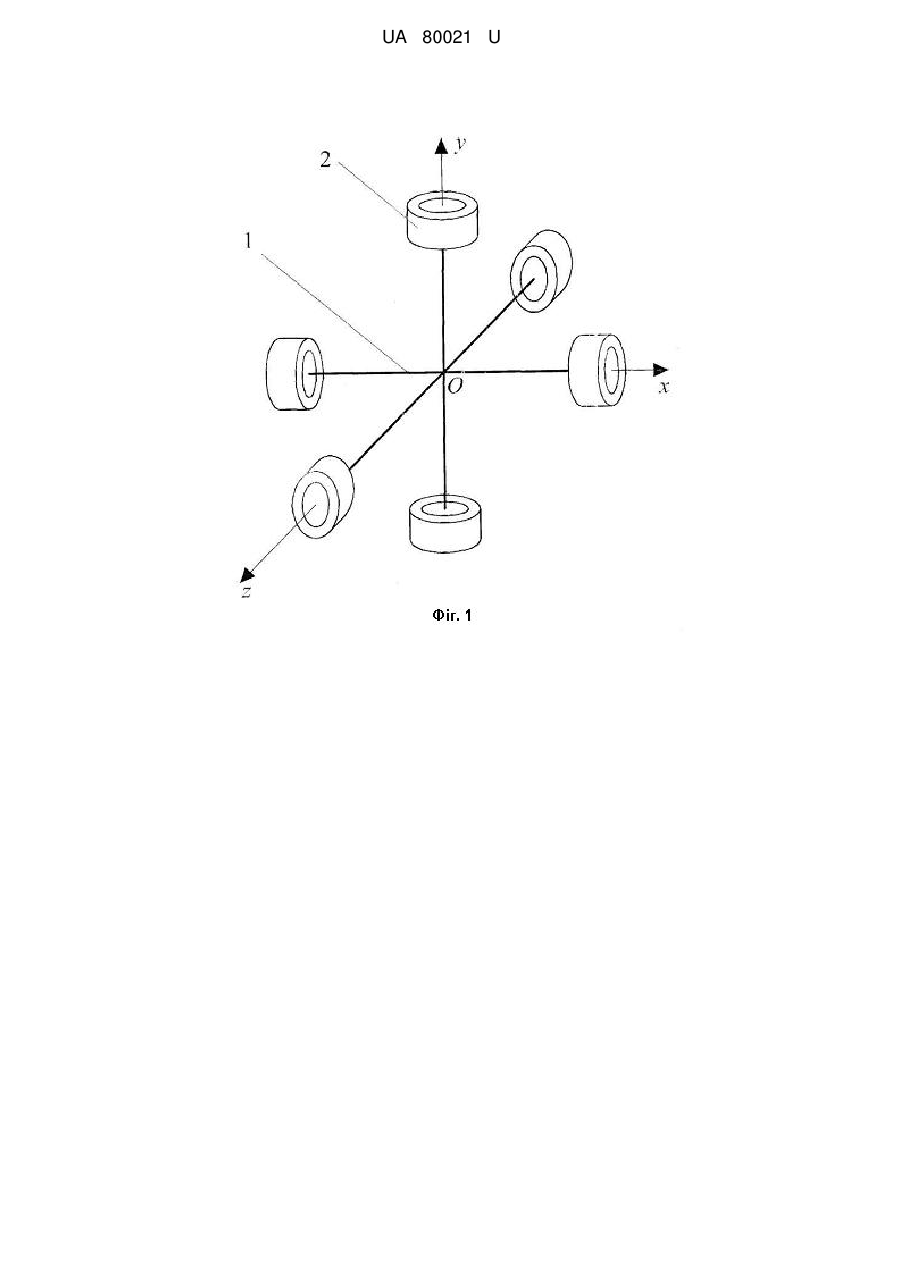
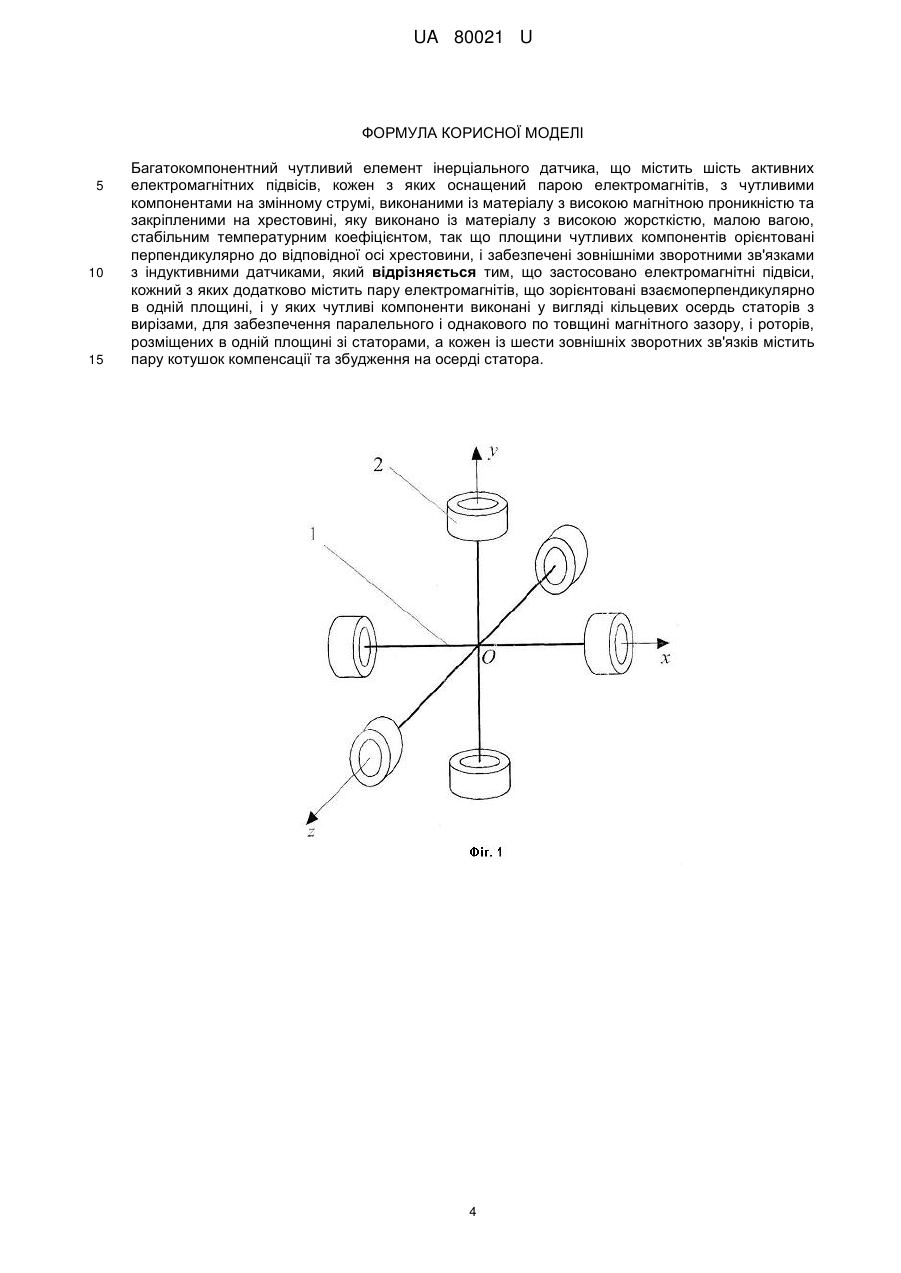
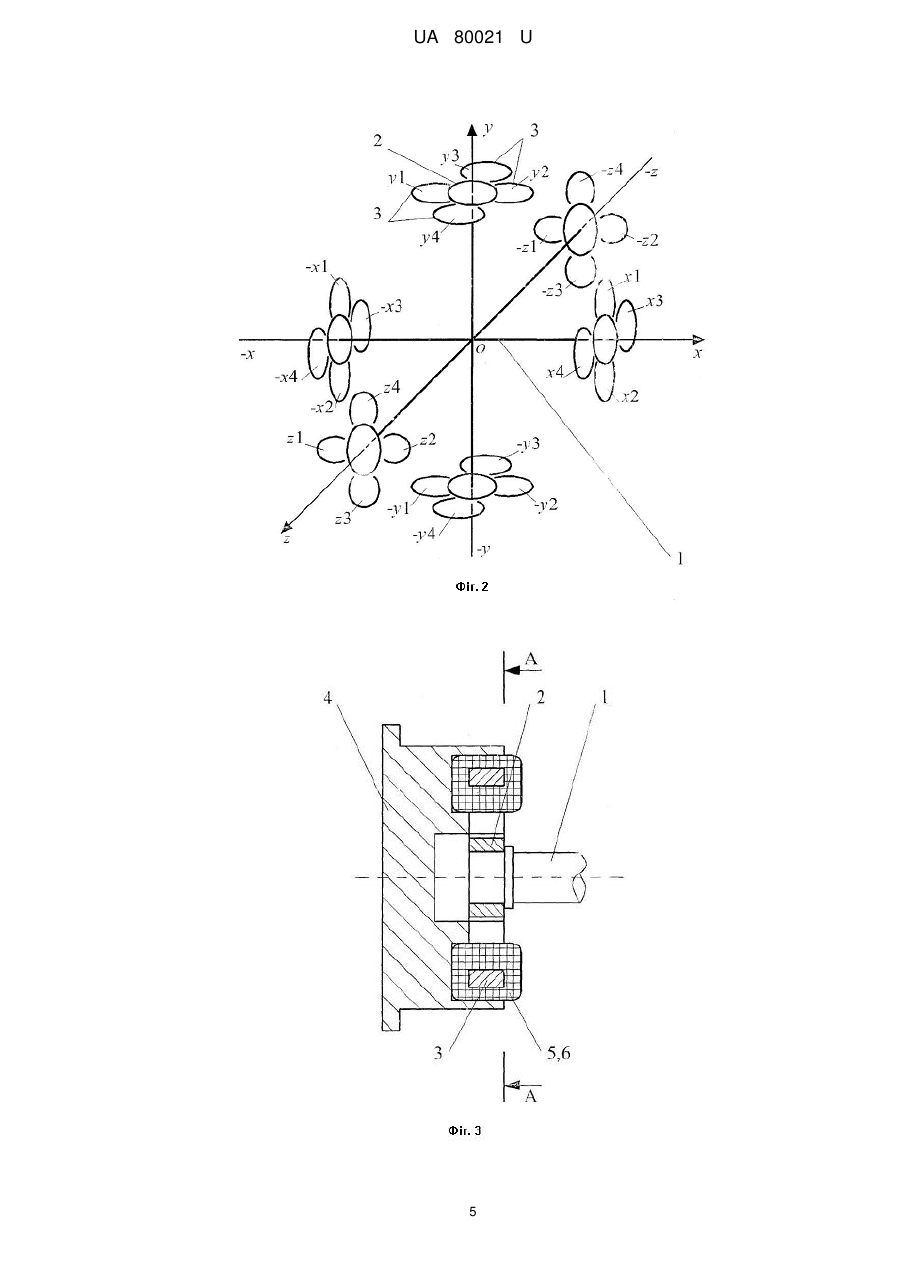
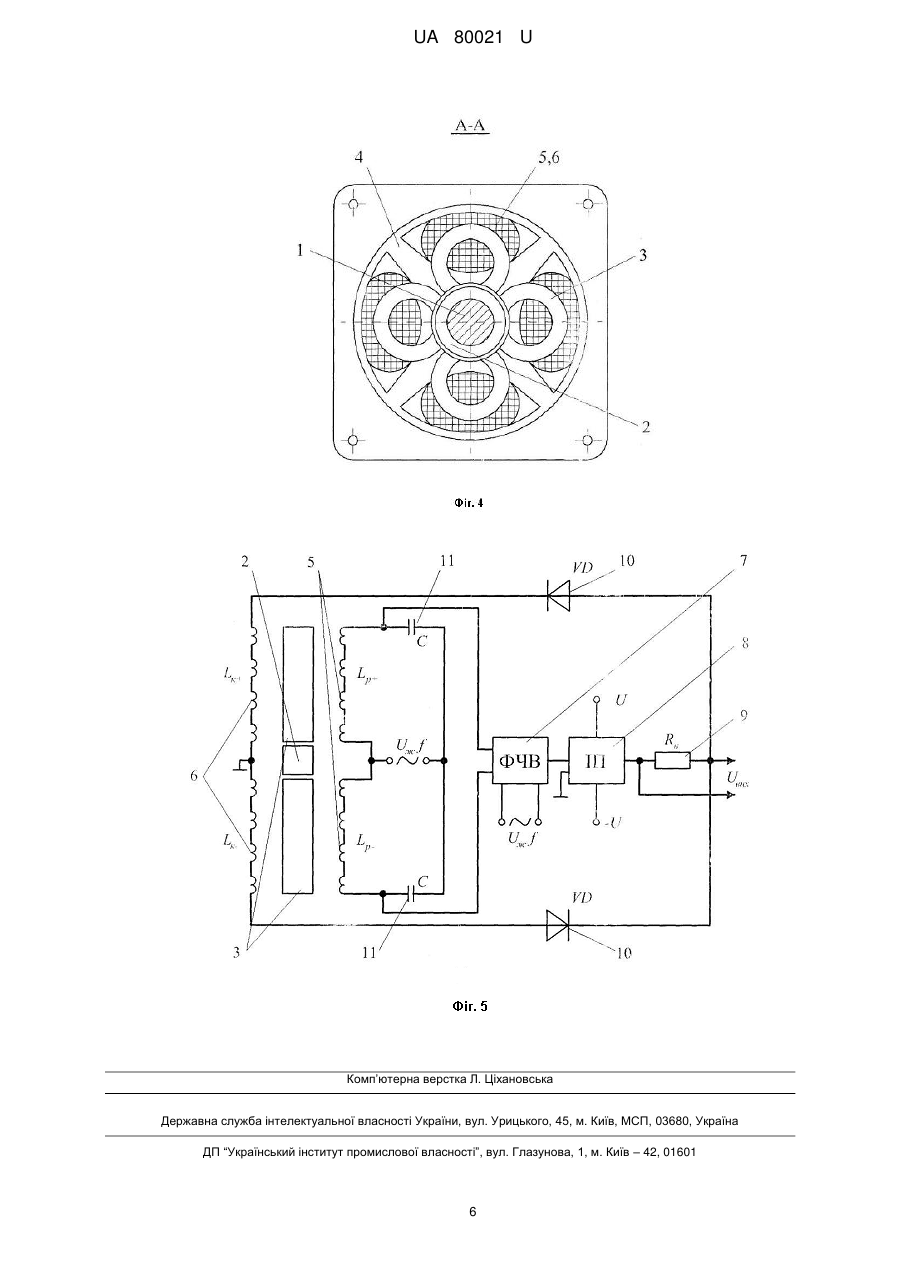
Реферат: UA 80021 U UA 80021 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до електровимірювальної техніки і може використовуватися для вирішення задач навігації, орієнтації і керування рухливими об'єктами (судна, кораблі, підводні човни, керовані та автономні підводні апарати, авіаційно-космічні літальні апарати, автомобілі, залізничний транспорт), коли необхідно забезпечите визначення й обчислення в реальному часі прискорень одночасно по шести компонентах відносно трьох осей прямокутної системи координат - по трьох лінійних і трьох кутових з похибкою не більше 0,05 %. Відомо про акселерометр із шістьма ступенями свободи на електромагнітній підвісці [заявка 4 Франції № 2594957, МПК G01Ρ 15/13], що являє собою інерціальний датчик. Триосьовий акселерометр із шістьма ступенями свободи вимірює одночасно три лінійних і три кутових прискорення відносно трьох осей прямокутної систем і координат, при цьому підвіска рухливої частини датчика виконана без механічних з'єднань з корпусом, за рахунок електромагнітного ефекту, .рухлива частина багатокомпонентного чутливого елемента (ЧЕ) такого датчика утворена просторовою хрестоподібною деталлю із шістьма стрижнями однакових розмірів, орієнтується і стабілізується щодо корпуса датчика за допомогою шести незалежних ланцюгів зворотного зв'язку, кожний з яких складається з детектора відхилення, ємнісного й індуктивного датчиків і електродвигунів постійного струму з постійними магнітами. Загальними ознаками аналога з заявленим технічним рішенням є: хрестовина, електромагнітний підвіс, наявність ланцюгів зворотного зв'язку. Однак тут зменшена чутливість внаслідок великої пружності, а також неминучий взаємний вплив системи електродвигуна і підвісу, що особливо буде позначатися при дії лінійних перевантажень і зсувів ротора, що забезпечує перевантажувальну здатність не більше 30g і знижує точність вимірів. Прототипом пропонованої корисної моделі може бути акселерометр [Патент на корисну 7 модель № 7176, МПК G01P 15/13], що містить шість активних електромагнітних підвісів з чутливими компонентами, закріпленими на хрестовині, і забезпечені зовнішніми зворотними зв'язками. В прототипі застосовано електромагнітні підвіси на змінному струмі, у яких чутливі компоненти виконані із матеріалу з високою магнітною проникністю у вигляді Ш-подібних осердь статорів і плоских роторів, при цьому площини чутливих компонентів орієнтовані перпендикулярно відповідної осі хрестовини, а кожен із шести зовнішніх зворотних зв'язків містить індуктивний датчик з котушкою компенсації на бічних стрижнях осердь статора і котушкою збудження на середньому стрижні осердя статора. Загальними ознаками з запропонованою корисною моделлю є: хрестовина, електромагнітний підвіс на змінному струмі, наявність ланцюгів зворотного зв'язку. Однак тут збільшено кількість споживаної електроенергії, зменшено чутливість, швидкодію та стійкість датчика до перевантажень внаслідок особливості конструкції електромагнітного підвісу. В основу корисної моделі поставлено задачу удосконалення багатокомпонентного чутливого елемента інерціального датчика, у якому завдяки заміні конструкції і принципу дії електромагнітного підвісу збільшено перевантажувальну здатність ЧЕ, підвищено чутливість датчика та поліпшено точність вимірів. Поставлена задача вирішується тим, що в багатокомпонентному чутливому елементі інерціального датчика, що містить шість активних електромагнітних підвісів, кожен з яких оснащений парою електромагнітів, з чутливими компонентами на змінному струмі, виконаними із матеріалу з високою магнітною проникністю та закріпленими на хрестовині, яку виконано із матеріалу з високою жорсткістю, малою вагою, стабільним температурним коефіцієнтом, так що площини чутливих компонентів орієнтовані перпендикулярно до відповідної осі хрестовини, і забезпечені зовнішніми зворотними зв'язками з індуктивними датчиками, згідно з корисною моделлю, застосовано електромагнітні підвіси, у яких добавлено пару застосовано електромагнітні підвіси, у кожному з яких добавлено пару електромагнітів, що зорієнтовані взаємоперпендикулярно в одній площині, і у яких чутливі компоненти виконані у вигляді кільцевих осердь статорів з вирізами, для забезпечення паралельного і однакового по товщині магнітного зазору, і роторів, розміщених в одній площині зі статорами, а кожен із шести зовнішніх зворотних зв'язків містить пару котушок компенсації та збудження на осерді статора. Для забезпечення необхідної перевантажувальної здатності на кожному осерді статора намотується котушка резонансного контуру і котушка компенсації. Переваги такої системи складаються в більш високій швидкодії, тому що явно виявлений зворотний зв'язок робить більш легким регулювання крутості зміни струмів; у можливості забезпечення меншого рівня моментів, що збурюють; у більшому діапазоні можливих значень центрованої сили внаслідок малої пружності і явища магнітного резонансу, що зменшує поріг чутливості датчика і збільшує точність вимірів. Зважене тіло (ЗТ) являє собою найбільш удосконалену конструкцію, в якій ЗТ у вигляді шестикінцевої об'ємної хрестовини підвішене за допомогою двадцяти чотирьох електромагнітів, 1 UA 80021 U 5 які розміщені так, що в кожній із трьох взаємно перпендикулярних площин їхнє число дорівнює восьми. Вони створюють шість ступенів свободи. Таке розміщення електромагнітів забезпечує необхідну перевантажувальну здатність, знижує похибку приладу і дозволяє вимірювати шість компонентів прискорення (три лінійних і три кутових). При цьому лінійне і кутове прискорення обчислюються за формулами: F F ai 1 2 ; m F F2 i 1 p, J 10 15 20 25 30 35 (1) (2) де F1 і F2 - сили виміру магнітним підвісом; m - маса ЗТ; J - момент інерції ЗТ щодо осі; p відстань від центра мас ЗТ до точки прикладення сил; ai - проекції вектора лінійного прискорення на i-у ось чутливості; i проекції кутового прискорення на дану вісь чутливості; i = 1,2,3 - осі чутливості. В електромагнітному підвісі магнітопровід статорів виготовлено з матеріалу з високою магнітною проникністю фериту 3000 МТ чи пермалою 79 НМ. Хрестовину виконано з берилію, електрона чи алюмінію для зменшення ваги конструкції. Ротори також виготовлені з фериту 3000 МТ чи пермалою 79 НМ. Котушки намотуються мідним проводом марки ПЕВ чи ПЕВ ТЛ1. На кресленнях показано принципову схему розміщення роторів підвісів на хрестовині фіг. 1; схема розміщення підвісів - фіг. 2; переріз підвісу багатокомпонентного чутливого інерційного датчика - фіг. 3; фіг. 4 - переріз по А-А підвісу багатокомпонентного чутливого інерціального датчика; принципова електрична схема одного з шести електромагнітних підвісів фіг. 5. Чутливий елемент містить інерційну масу, що складається з хрестовини 1, на якій жорстко перпендикулярно осям закріплені ротори 2 (шість штук - по одному на кожній з півосей) (фіг. 1). Інерційна маса левітує у магнітному полі двадцяти чотирьох електромагнітів-статорів 3 (фіг. 2), закріплених на корпусі ЧЕ 4 (фіг. 3, фіг. 4) і орієнтованих перпендикулярно півосям хрестовини 1 (у1, у2, у3, у4, -z1, -z2, -z3, -z4, x1, x2, х3, х4 –у1, -у2, -у3, -у4, z1, z2, z3, z4, -х1, -х2, -х3, -х4) (фіг.2). Двадцять чотири датчики переміщень складаються з котушок збудження (резонансного контуру) 5, намотаних на осердя статора 3, і котушок силової компенсації 6, також намотаних на осердя статора 3, який з осердям ротора 2 складає магнітну систему (фіг. 3, фіг. 4, фіг. 5). Для реалізації силового розвантаження резонансного підвісу призначений ланцюг силової компенсації, до якого входять послідовно з'єднані фазочутливий випрямляч ФЧВ 7, інтегруючий підсилювач ІП 8, вимірювальний резистор Rв9, вентилі (діоди) VD 10 і котушки компенсації 6 утворюють зворотній зв'язок. Конденсатори С 11 разом з котушками збудження 5 утворюють резонансний контур (фіг. 5). З'єднання котушок для вимірювання лінійних та кутових прискорень виконують за таблицями 1 та 2. Таблиця 1 З'єднання котушок для вимірювання лінійних прискорень La : y1, z1, y1, z1; px La : y 2, z2, y 2, z2; px La : x 2, z3, x 2, z3; py La : x1, z 4, x1, z 4; py La : x3, y3, x3, y3; pz La : x 4, y 4, x 4, y 4; pz 2 UA 80021 U Таблиця 2 З'єднання котушок для вимірювання кутових прискорень L : y 4, z3, y3, z 4; px L : y3, z 4, y 4, z3; px L : x3, z2, x 4, z1; py L : x 4, z1, x3, z2; py L : x1, y 2, x 2, y1; pz L : x 2, y1, x1, y 2; pz 5 10 15 20 25 Як приклад виконання узято ротор датчика із шести феритових кілець зовнішнім діаметром D = 10 мм, внутрішнім діаметром d = 6 мм, шириною h = 4 мм. Вага кільця 0,603 г. Кільця з'єднані в єдину конструкцію стрижнями. Довжина стрижня I = 25 мм від центра сполучення до кінця. Вага ЗТ повинна бути приблизно порядка 6,2 г. Котушки статора намотуються на кільцях аналогічних феритовим кільцям ротора. У кільцях статора зроблені вирізи для забезпечення паралельного та однакового по товщині магнітного зазору між осердям статора и ротора δ = 0,2 мм. Для забезпечення необхідної перевантажувальної здатності на кожному осерді статора намотується котушка резонансного контуру і котушка компенсації, кількість витків відповідно * w p 200 w k 220 .Котушки намотуються мідним проводом марки ПЭВ чи ПЭВ ТЛІ діаметром , * 0,05 мм. Активний опір резонансного ланцюга Rp = 1,0 Ом. Активний опір ланцюга компенсації Rk = 1,1 Ом. Ємність кожного з конденсаторів резонансних ланцюгів С = 1.1 мкФ. Слід зазначити, що wp = 4w*p і wk = 4w*k, тому що котушки Lp і Lk являють собою чотири послідовно з'єднані котушки, намотаних на розташованих по відповідній вимірювальній осі осердя статора (фіг. 2). Резонансні ланцюги живляться від джерела змінного струму напругою Uж = 0,15 В и частотою f = 5 кГц. Дана схема забезпечує перевантажувальну здатність більше 30 g. При максимальному перевантаженні струм у резонансному ланцюзі у першій гілці - 144 мА, другій гілці - 5,25 мА. Багатокомпонентний чутливий елемент інерціального датчика працює так. При русі об'єкта, на якому встановлено датчик прискорень, інерційна маса (хрестовина) 1 чутливого елемента, розміщена в корпусі 4 змінює своє положення, переміщуючи при цьому ротори 2 у напрямку до статорів 3, змінюючи повітряний зазор між ними. Вхідним сигналом ФЧВ 7 є різниця напруг на конденсаторах 11 ΔUC = UC+ - UC-, а знак його вихідного сигналу залежить t від знака ΔUC. На виході ІП 8 одержуємо напругу Uk UC dt. У залежності від його знака в 0 30 35 котушці компенсації 6 Lk+ чи Lk- тече струм компенсації, що приводить до появи центрової сили, реакції електромагнітів, яка прагне вернути ротор 2 а, отже, і хрестовину 1, у початкове положення. Цим забезпечується зворотний зв'язок слідкуючої системи електромагнітного підвісу. Таким чином, сили, створювані кожною парою електромагнітів, прагнуть утримувати інерційну масу в центральному положенні. Внаслідок того що в у кожній з трьох взаємно перпендикулярних площин діють вісім електромагнітів та легкості матеріалу, хрестовина швидше досягає стану левітації і має кращу стійкість. Пропонований винахід забезпечує перевантажувальну здатність більш 30 g, дозволяє на порядок підвищити точність, швидкодію та чутливість інерціального датчика, при цьому зменшити його енергоспоживання. З'єднання функцій підвісу і датчика в єдиній структурі, що забезпечує формування інваріантної характеристики, яка зв'язує силу з інформаційним параметром, дозволяє вирішити проблему створення багатокомпонентних одномасових приладів для виміру цілого ряду фізичних параметрів, перетворених у силу. 40 3 UA 80021 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 Багатокомпонентний чутливий елемент інерціального датчика, що містить шість активних електромагнітних підвісів, кожен з яких оснащений парою електромагнітів, з чутливими компонентами на змінному струмі, виконаними із матеріалу з високою магнітною проникністю та закріпленими на хрестовині, яку виконано із матеріалу з високою жорсткістю, малою вагою, стабільним температурним коефіцієнтом, так що площини чутливих компонентів орієнтовані перпендикулярно до відповідної осі хрестовини, і забезпечені зовнішніми зворотними зв'язками з індуктивними датчиками, який відрізняється тим, що застосовано електромагнітні підвіси, кожний з яких додатково містить пару електромагнітів, що зорієнтовані взаємоперпендикулярно в одній площині, і у яких чутливі компоненти виконані у вигляді кільцевих осердь статорів з вирізами, для забезпечення паралельного і однакового по товщині магнітного зазору, і роторів, розміщених в одній площині зі статорами, а кожен із шести зовнішніх зворотних зв'язків містить пару котушок компенсації та збудження на осерді статора. 4 UA 80021 U 5 UA 80021 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMulti-component sensitive element of inertial sensor
Автори англійськоюSnihur Anatolii Kyrylovych
Назва патенту російськоюМногокомпонентный чувствительный элемент инерциального датчика
Автори російськоюСнигур Анатолий Кириллович
МПК / Мітки
МПК: G01P 15/13
Мітки: елемент, чутливий, багатокомпонентний, інерціального, датчика
Код посилання
<a href="https://ua.patents.su/8-80021-bagatokomponentnijj-chutlivijj-element-inercialnogo-datchika.html" target="_blank" rel="follow" title="База патентів України">Багатокомпонентний чутливий елемент інерціального датчика</a>
Багатокомпонентний чутливий елемент інерціального датчика
Номер патенту: 7176
Опубліковано: 15.06.2005
Автор: Снігур Анатолій Кирилович
МПК: G01P 15/13, G01P 15/00
Мітки: датчика, чутливий, інерціального, елемент, багатокомпонентний
Формула / Реферат:
1. Багатокомпонентний чутливий елемент інерціального датчика, що містить шість активних електромагнітних підвісів з чутливими компонентами, закріпленими на хрестовині і оснащеними зовнішніми зворотними зв'язками, який відрізняється тим, що застосовано електромагнітні підвіси на змінному струмі, у яких чутливі компоненти виконані із матеріалу з високою магнітною проникністю у вигляді Ш-подібних осердь статорів і плоских роторів, при цьому...
Коаксіальний чутливий елемент датчика

Номер патенту: 58755
Опубліковано: 15.09.2004
Автори: Булдижов Андрій Іванович, Жуков Юрій Даніілович, Гордєєв Борис Миколайович
МПК: G01F 23/28, G01K 3/00
Мітки: коаксіальний, датчика, чутливий, елемент
Формула / Реферат:
1. Спосіб підготування виїмкової дільниці, що включає буріння свердловин із земної поверхні й обсадку їх трубами при проведенні підготовчої виробки, збійку свердловин з підготовчою виробкою і відсмоктування газоповітряної суміші по свердловині, з'єднаної з вентилятором, який відрізняється тим, що підготовчу виробку проводять на початку виїмкової дільниці довжиною 20–30 м, буріння свердловин із земної поверхні здійснюють двома свердловинами,...
Чутливий елемент датчика втомного пошкодження конструкції
Номер патенту: 36513
Опубліковано: 27.10.2008
Автори: Грабовський Анатолій Павлович, Бобир Микола Іванович, Тривайло Михайло Семенович
МПК: G01B 7/16
Мітки: елемент, датчика, пошкодження, конструкції, чутливий, втомного
Формула / Реферат:
Чутливий елемент датчика втомного пошкодження конструкції, що містить виконаний із змінюючої електричний опір при циклічному навантаженні фольги диск у формі зірочки з діаметрально протилежно розташованими променями і розміщені на кінцях променів площадки для приєднання до реєструючого приладу, який відрізняється тим, що він обладнаний додатковою контактною площадкою, яка розміщена в центрі зірочки.
Чутливий елемент датчика вологості
Номер патенту: 18290
Опубліковано: 25.12.1997
Автори: Насипайко Олександр Васильович, Костенко Сергій Петрович, Бідник Дмитро Ілліч, Августімов Віталій Леонідович, Остапчук Анатолій Іванович
МПК: G01N 27/12
Мітки: елемент, датчика, вологості, чутливий
Формула / Реферат:
Чувствительный элемент датчика влажности, содержащий кремниевую пластину, на поверхность которой последовательно нанесены слои окисла и нитрида кремния, поверх последнего сформирован в виде прямоугольных полос слой поликристаллического кремния с двумя электродами, легированного ионами элементов III или V групп, с нанесенным материалом, сорбирующим влагу, отличающийся тем, что слой поликремния сформирован в виде двух ортогональных по осям...
Чутливий елемент датчика коливань та спосіб реєстрації коливань поверхні
Номер патенту: 81308
Опубліковано: 25.12.2007
Автор: Попов Юрій Васильович
МПК: G01H 17/00, G01V 1/16
Мітки: чутливий, спосіб, коливань, датчика, реєстрації, елемент, поверхні
Формула / Реферат:
1. Чутливий елемент датчика коливань для роботи у рідинному середовищі, який відрізняється тим, що чутливий елемент виконаний у вигляді заповненого рідиною трубчастого корпусу, який має вхідний та вихідний отвори, причому вхідний отвір трубчастого корпусу герметично закритий пружною мембраною, через яку коливання поверхні надходять до чутливого елемента, вихідний отвір виконаний з можливістю розташування вимірювального перетворювача...
Попередній патент: Спосіб установки бонових загороджень для локалізації нафтової та нафтопродуктної плями на поверхні води
Наступний патент: Амортизатор з автоматично регульованим зусиллям відбою штока
Випадковий патент: Пристрій охоронної сигналізації