Мікропроцесорний керуючий обчислювальний комплекс мску-3


Формула / Реферат
1. Мікропроцесорний керуючий обчислювальний комплекс, що містить дубльовані канали обробки сигналів від первинних вимірювальних перетворювачів, причому кожний канал містить вхідну з'єднувальну панель для приймання вхідних аналогових або дискретних сигналів, два вхідні модулі зв'язку з об'єктом для первинної обробки дискретних і аналогових сигналів, два мікропроцесорні обчислювальні модулі, два вихідні модулі зв'язку з об'єктом і вихідну з'єднувальну панель, який відрізняється тим, що містить додатковий вхідний модуль зв'язку з об'єктом, додатковий мікропроцесорний обчислювальний модуль і додатковий вихідний модуль зв'язку з об'єктом, причому вихід вхідної з'єднувальної панелі з'єднано із входами трьох вхідних модулів зв'язку з об'єктом, вихід кожного вхідного модуля зв'язку з об'єктом з'єднаний із входом відповідного мікропроцесорного обчислювального модуля, причому входи/виходи для обміну вхідними даними кожного мікропроцесорного обчислювального модуля з'єднані з виходами/входами для обміну вхідними даними кожного із двох сусідніх мікропроцесорних обчислювальних модулів, вихід кожного мікропроцесорного обчислювального модуля з'єднаний із входом відповідного вихідного модуля зв'язку з об'єктом, вихід кожного вихідного модуля зв'язку з об'єктом з'єднаний з відповідним входом вихідної з'єднувальної панелі, причому вихідна з'єднувальна панель виконана з можливістю електричного мажорування вхідних сигналів за схемою "2 із 3" і формування результуючого електричного сигналу, а вихід вихідної з'єднувальної панелі з'єднаний з відповідним виконавчим пристроєм.
2. Комплекс за п. 1, який відрізняється тим, що кожний мікропроцесорний обчислювальний модуль оснащений портами інтерфейсів Ethernet, портами оптичного інтерфейсу UART, портами внутрішнього послідовного радіального інтерфейсу й модулями для зовнішніх зв'язків інтерфейсами RS-422 і RS-485.
3. Комплекс за п. 1, який відрізняється тим, що модулі зв'язку з об'єктами оснащені портами послідовного радіального інтерфейсу.
4. Комплекс за п. 1, який відрізняється тим, що містить модулі контролю роботоздатності й стану обладнання, оснащені портами послідовного радіального інтерфейсу.
5. Комплекс за п. 1, який відрізняється тим, що конструктивно виконаний у вигляді підлогової шафи.
Текст
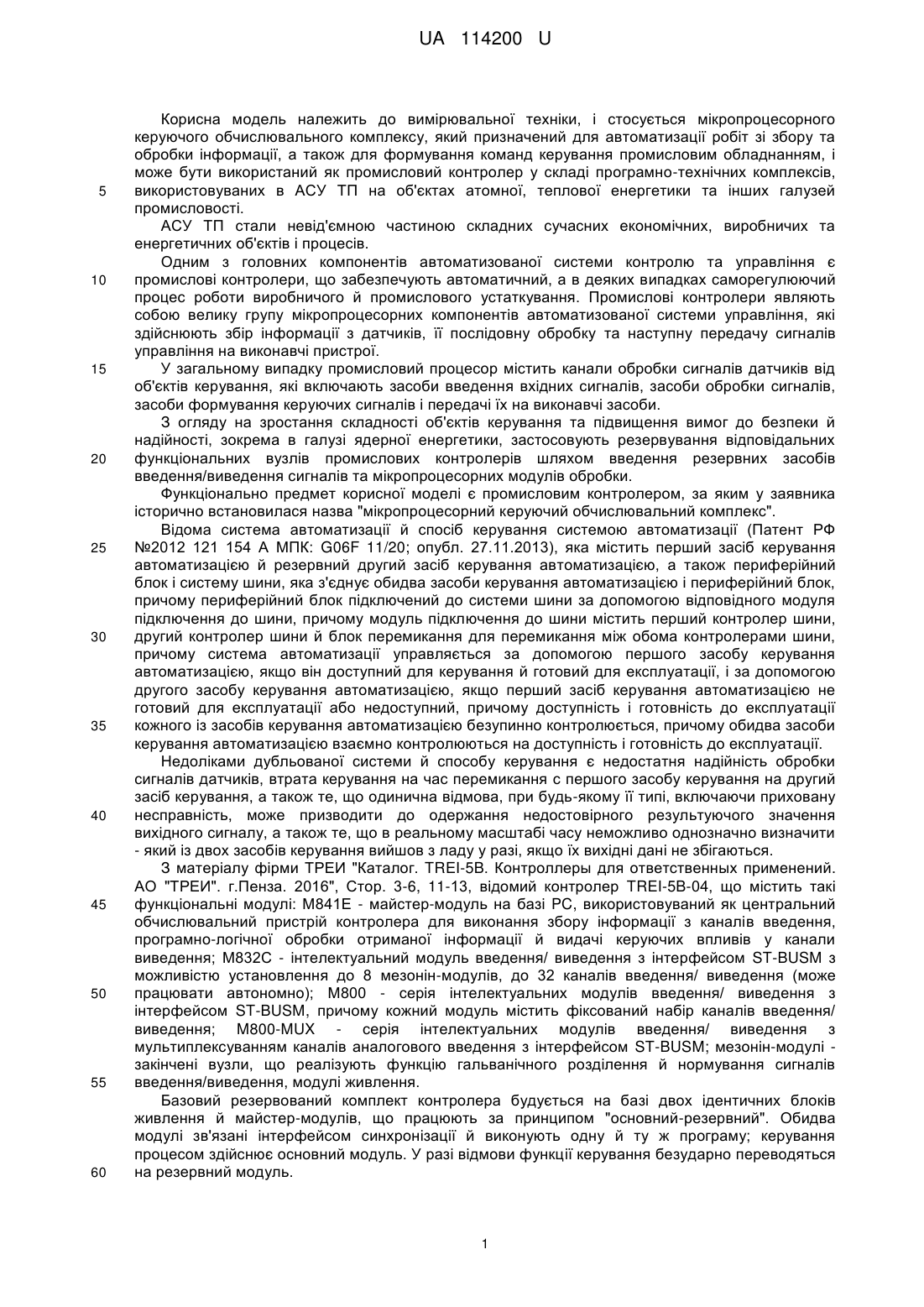
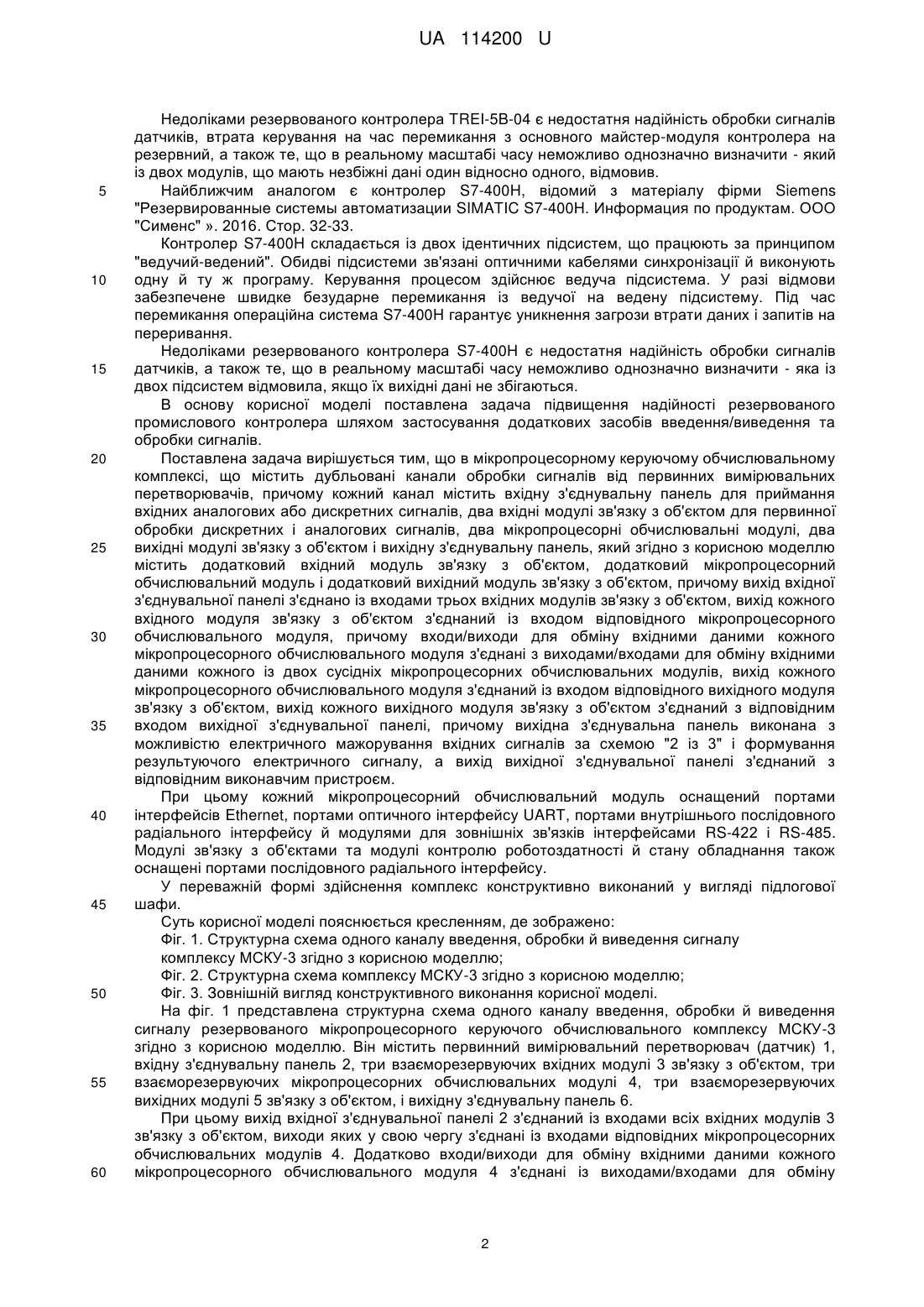
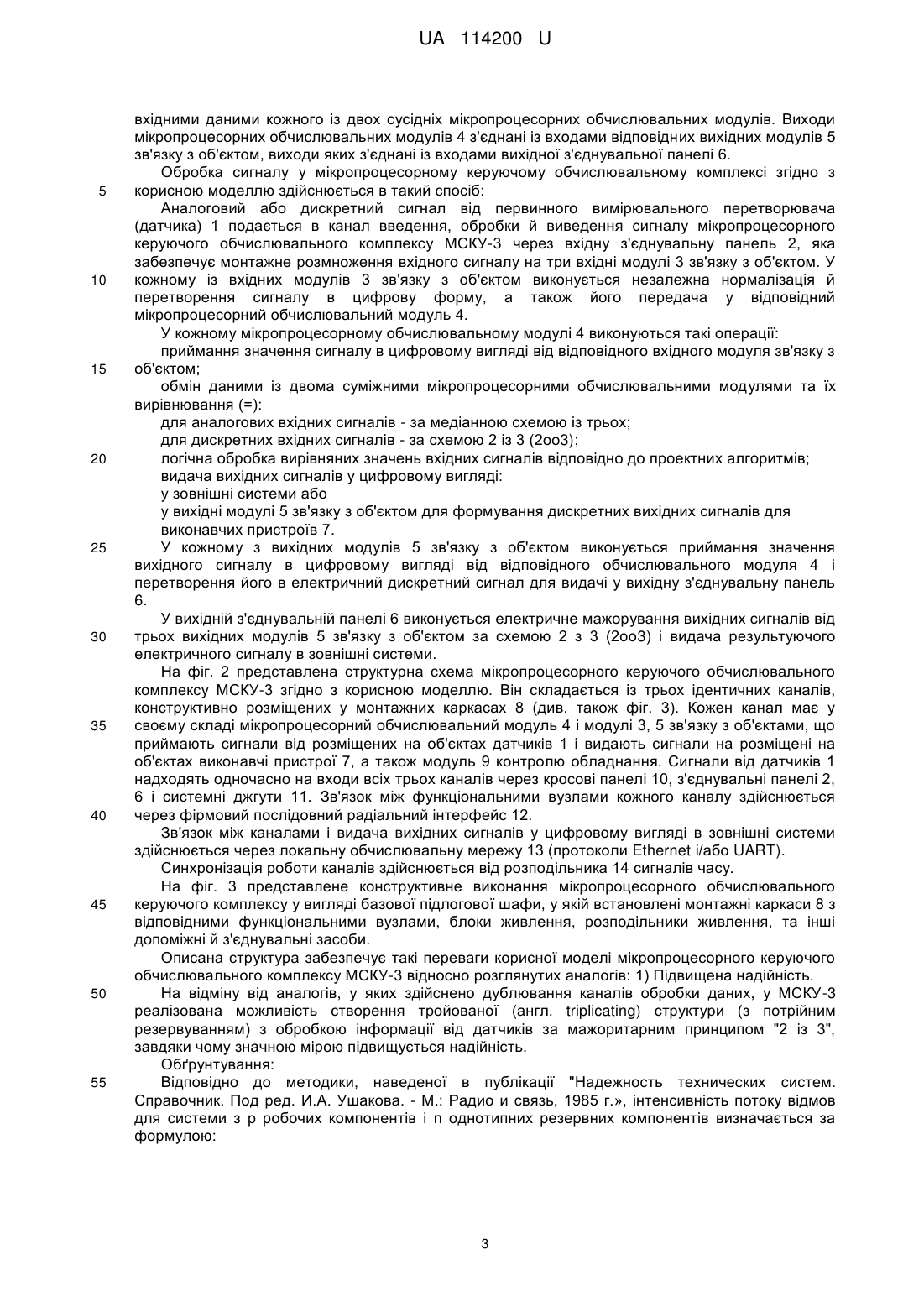
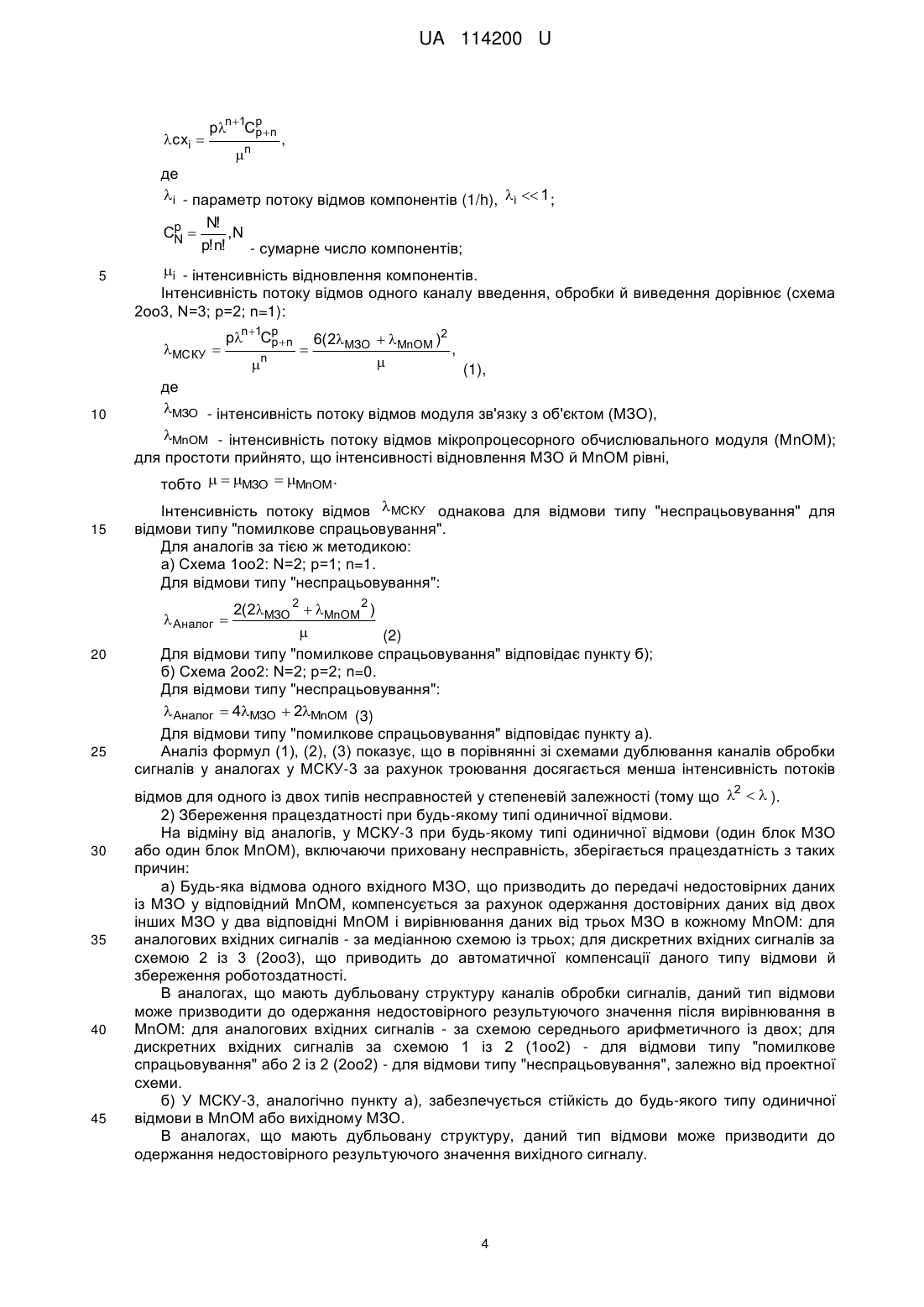
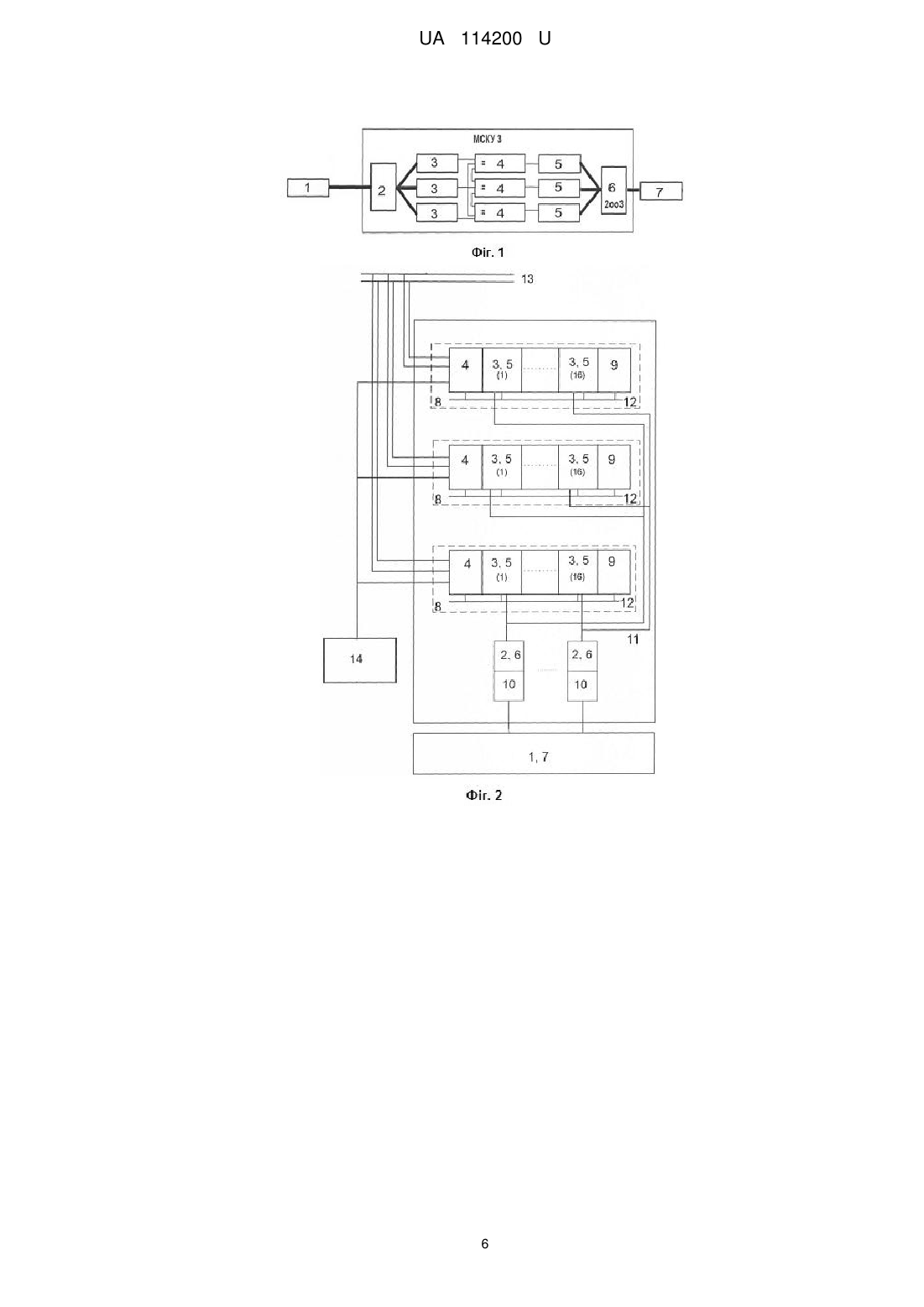
Реферат: UA 114200 U UA 114200 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до вимірювальної техніки, і стосується мікропроцесорного керуючого обчислювального комплексу, який призначений для автоматизації робіт зі збору та обробки інформації, а також для формування команд керування промисловим обладнанням, і може бути використаний як промисловий контролер у складі програмно-технічних комплексів, використовуваних в АСУ ТП на об'єктах атомної, теплової енергетики та інших галузей промисловості. АСУ ТП стали невід'ємною частиною складних сучасних економічних, виробничих та енергетичних об'єктів і процесів. Одним з головних компонентів автоматизованої системи контролю та управління є промислові контролери, що забезпечують автоматичний, а в деяких випадках саморегулюючий процес роботи виробничого й промислового устаткування. Промислові контролери являють собою велику групу мікропроцесорних компонентів автоматизованої системи управління, які здійснюють збір інформації з датчиків, її послідовну обробку та наступну передачу сигналів управління на виконавчі пристрої. У загальному випадку промисловий процесор містить канали обробки сигналів датчиків від об'єктів керування, які включають засоби введення вхідних сигналів, засоби обробки сигналів, засоби формування керуючих сигналів і передачі їх на виконавчі засоби. З огляду на зростання складності об'єктів керування та підвищення вимог до безпеки й надійності, зокрема в галузі ядерної енергетики, застосовують резервування відповідальних функціональних вузлів промислових контролерів шляхом введення резервних засобів введення/виведення сигналів та мікропроцесорних модулів обробки. Функціонально предмет корисної моделі є промисловим контролером, за яким у заявника історично встановилася назва "мікропроцесорний керуючий обчислювальний комплекс". Відома система автоматизації й спосіб керування системою автоматизації (Патент РФ №2012 121 154 А МПК: G06F 11/20; опубл. 27.11.2013), яка містить перший засіб керування автоматизацією й резервний другий засіб керування автоматизацією, а також периферійний блок і систему шини, яка з'єднує обидва засоби керування автоматизацією і периферійний блок, причому периферійний блок підключений до системи шини за допомогою відповідного модуля підключення до шини, причому модуль підключення до шини містить перший контролер шини, другий контролер шини й блок перемикання для перемикання між обома контролерами шини, причому система автоматизації управляється за допомогою першого засобу керування автоматизацією, якщо він доступний для керування й готовий для експлуатації, і за допомогою другого засобу керування автоматизацією, якщо перший засіб керування автоматизацією не готовий для експлуатації або недоступний, причому доступність і готовність до експлуатації кожного із засобів керування автоматизацією безупинно контролюється, причому обидва засоби керування автоматизацією взаємно контролюються на доступність і готовність до експлуатації. Недоліками дубльованої системи й способу керування є недостатня надійність обробки сигналів датчиків, втрата керування на час перемикання с першого засобу керування на другий засіб керування, а також те, що одинична відмова, при будь-якому її типі, включаючи приховану несправність, може призводити до одержання недостовірного результуючого значення вихідного сигналу, а також те, що в реальному масштабі часу неможливо однозначно визначити - який із двох засобів керування вийшов з ладу у разі, якщо їх вихідні дані не збігаються. З матеріалу фірми ТРЕИ "Каталог. TREI-5B. Контроллеры для ответственных применений. АО "ТРЕИ". г.Пенза. 2016", Стор. 3-6, 11-13, відомий контролер TREI-5B-04, що містить такі функціональні модулі: М841Е - майстер-модуль на базі PC, використовуваний як центральний обчислювальний пристрій контролера для виконання збору інформації з каналів введення, програмно-логічної обробки отриманої інформації й видачі керуючих впливів у канали виведення; М832С - інтелектуальний модуль введення/ виведення з інтерфейсом ST-BUSM з можливістю установлення до 8 мезонін-модулів, до 32 каналів введення/ виведення (може працювати автономно); М800 - серія інтелектуальних модулів введення/ виведення з інтерфейсом ST-BUSM, причому кожний модуль містить фіксований набір каналів введення/ виведення; M800-MUX - серія інтелектуальних модулів введення/ виведення з мультиплексуванням каналів аналогового введення з інтерфейсом ST-BUSM; мезонін-модулі закінчені вузли, що реалізують функцію гальванічного розділення й нормування сигналів введення/виведення, модулі живлення. Базовий резервований комплект контролера будується на базі двох ідентичних блоків живлення й майстер-модулів, що працюють за принципом "основний-резервний". Обидва модулі зв'язані інтерфейсом синхронізації й виконують одну й ту ж програму; керування процесом здійснює основний модуль. У разі відмови функції керування безударно переводяться на резервний модуль. 1 UA 114200 U 5 10 15 20 25 30 35 40 45 50 55 60 Недоліками резервованого контролера TREI-5B-04 є недостатня надійність обробки сигналів датчиків, втрата керування на час перемикання з основного майстер-модуля контролера на резервний, а також те, що в реальному масштабі часу неможливо однозначно визначити - який із двох модулів, що мають незбіжні дані один відносно одного, відмовив. Найближчим аналогом є контролер S7-400H, відомий з матеріалу фірми Siemens "Резервированные системы автоматизации SIMATIC S7-400H. Информация по продуктам. ООО "Сименс" ». 2016. Стор. 32-33. Контролер S7-400H складається із двох ідентичних підсистем, що працюють за принципом "ведучий-ведений". Обидві підсистеми зв'язані оптичними кабелями синхронізації й виконують одну й ту ж програму. Керування процесом здійснює ведуча підсистема. У разі відмови забезпечене швидке безударне перемикання із ведучої на ведену підсистему. Під час перемикання операційна система S7-400H гарантує уникнення загрози втрати даних і запитів на переривання. Недоліками резервованого контролера S7-400H є недостатня надійність обробки сигналів датчиків, а також те, що в реальному масштабі часу неможливо однозначно визначити - яка із двох підсистем відмовила, якщо їх вихідні дані не збігаються. В основу корисної моделі поставлена задача підвищення надійності резервованого промислового контролера шляхом застосування додаткових засобів введення/виведення та обробки сигналів. Поставлена задача вирішується тим, що в мікропроцесорному керуючому обчислювальному комплексі, що містить дубльовані канали обробки сигналів від первинних вимірювальних перетворювачів, причому кожний канал містить вхідну з'єднувальну панель для приймання вхідних аналогових або дискретних сигналів, два вхідні модулі зв'язку з об'єктом для первинної обробки дискретних і аналогових сигналів, два мікропроцесорні обчислювальні модулі, два вихідні модулі зв'язку з об'єктом і вихідну з'єднувальну панель, який згідно з корисною моделлю містить додатковий вхідний модуль зв'язку з об'єктом, додатковий мікропроцесорний обчислювальний модуль і додатковий вихідний модуль зв'язку з об'єктом, причому вихід вхідної з'єднувальної панелі з'єднано із входами трьох вхідних модулів зв'язку з об'єктом, вихід кожного вхідного модуля зв'язку з об'єктом з'єднаний із входом відповідного мікропроцесорного обчислювального модуля, причому входи/виходи для обміну вхідними даними кожного мікропроцесорного обчислювального модуля з'єднані з виходами/входами для обміну вхідними даними кожного із двох сусідніх мікропроцесорних обчислювальних модулів, вихід кожного мікропроцесорного обчислювального модуля з'єднаний із входом відповідного вихідного модуля зв'язку з об'єктом, вихід кожного вихідного модуля зв'язку з об'єктом з'єднаний з відповідним входом вихідної з'єднувальної панелі, причому вихідна з'єднувальна панель виконана з можливістю електричного мажорування вхідних сигналів за схемою "2 із 3" і формування результуючого електричного сигналу, а вихід вихідної з'єднувальної панелі з'єднаний з відповідним виконавчим пристроєм. При цьому кожний мікропроцесорний обчислювальний модуль оснащений портами інтерфейсів Ethernet, портами оптичного інтерфейсу UART, портами внутрішнього послідовного радіального інтерфейсу й модулями для зовнішніх зв'язків інтерфейсами RS-422 і RS-485. Модулі зв'язку з об'єктами та модулі контролю роботоздатності й стану обладнання також оснащені портами послідовного радіального інтерфейсу. У переважній формі здійснення комплекс конструктивно виконаний у вигляді підлогової шафи. Суть корисної моделі пояснюється кресленням, де зображено: Фіг. 1. Структурна схема одного каналу введення, обробки й виведення сигналу комплексу МСКУ-3 згідно з корисною моделлю; Фіг. 2. Структурна схема комплексу МСКУ-3 згідно з корисною моделлю; Фіг. 3. Зовнішній вигляд конструктивного виконання корисної моделі. На фіг. 1 представлена структурна схема одного каналу введення, обробки й виведення сигналу резервованого мікропроцесорного керуючого обчислювального комплексу МСКУ-3 згідно з корисною моделлю. Він містить первинний вимірювальний перетворювач (датчик) 1, вхідну з'єднувальну панель 2, три взаєморезервуючих вхідних модулі 3 зв'язку з об'єктом, три взаєморезервуючих мікропроцесорних обчислювальних модулі 4, три взаєморезервуючих вихідних модулі 5 зв'язку з об'єктом, і вихідну з'єднувальну панель 6. При цьому вихід вхідної з'єднувальної панелі 2 з'єднаний із входами всіх вхідних модулів 3 зв'язку з об'єктом, виходи яких у свою чергу з'єднані із входами відповідних мікропроцесорних обчислювальних модулів 4. Додатково входи/виходи для обміну вхідними даними кожного мікропроцесорного обчислювального модуля 4 з'єднані із виходами/входами для обміну 2 UA 114200 U 5 10 15 20 25 30 35 40 45 50 55 вхідними даними кожного із двох сусідніх мікропроцесорних обчислювальних модулів. Виходи мікропроцесорних обчислювальних модулів 4 з'єднані із входами відповідних вихідних модулів 5 зв'язку з об'єктом, виходи яких з'єднані із входами вихідної з'єднувальної панелі 6. Обробка сигналу у мікропроцесорному керуючому обчислювальному комплексі згідно з корисною моделлю здійснюється в такий спосіб: Аналоговий або дискретний сигнал від первинного вимірювального перетворювача (датчика) 1 подається в канал введення, обробки й виведення сигналу мікропроцесорного керуючого обчислювального комплексу МСКУ-3 через вхідну з'єднувальну панель 2, яка забезпечує монтажне розмноження вхідного сигналу на три вхідні модулі 3 зв'язку з об'єктом. У кожному із вхідних модулів 3 зв'язку з об'єктом виконується незалежна нормалізація й перетворення сигналу в цифрову форму, а також його передача у відповідний мікропроцесорний обчислювальний модуль 4. У кожному мікропроцесорному обчислювальному модулі 4 виконуються такі операції: приймання значення сигналу в цифровому вигляді від відповідного вхідного модуля зв'язку з об'єктом; обмін даними із двома суміжними мікропроцесорними обчислювальними модулями та їх вирівнювання (=): для аналогових вхідних сигналів - за медіанною схемою із трьох; для дискретних вхідних сигналів - за схемою 2 із 3 (2оо3); логічна обробка вирівняних значень вхідних сигналів відповідно до проектних алгоритмів; видача вихідних сигналів у цифровому вигляді: у зовнішні системи або у вихідні модулі 5 зв'язку з об'єктом для формування дискретних вихідних сигналів для виконавчих пристроїв 7. У кожному з вихідних модулів 5 зв'язку з об'єктом виконується приймання значення вихідного сигналу в цифровому вигляді від відповідного обчислювального модуля 4 і перетворення його в електричний дискретний сигнал для видачі у вихідну з'єднувальну панель 6. У вихідній з'єднувальній панелі 6 виконується електричне мажорування вихідних сигналів від трьох вихідних модулів 5 зв'язку з об'єктом за схемою 2 з 3 (2оо3) і видача результуючого електричного сигналу в зовнішні системи. На фіг. 2 представлена структурна схема мікропроцесорного керуючого обчислювального комплексу МСКУ-3 згідно з корисною моделлю. Він складається із трьох ідентичних каналів, конструктивно розміщених у монтажних каркасах 8 (див. також фіг. 3). Кожен канал має у своєму складі мікропроцесорний обчислювальний модуль 4 і модулі 3, 5 зв'язку з об'єктами, що приймають сигнали від розміщених на об'єктах датчиків 1 і видають сигнали на розміщені на об'єктах виконавчі пристрої 7, а також модуль 9 контролю обладнання. Сигнали від датчиків 1 надходять одночасно на входи всіх трьох каналів через кросові панелі 10, з'єднувальні панелі 2, 6 і системні джгути 11. Зв'язок між функціональними вузлами кожного каналу здійснюється через фірмовий послідовний радіальний інтерфейс 12. Зв'язок між каналами і видача вихідних сигналів у цифровому вигляді в зовнішні системи здійснюється через локальну обчислювальну мережу 13 (протоколи Ethernet і/або UART). Синхронізація роботи каналів здійснюється від розподільника 14 сигналів часу. На фіг. 3 представлене конструктивне виконання мікропроцесорного обчислювального керуючого комплексу у вигляді базової підлогової шафи, у якій встановлені монтажні каркаси 8 з відповідними функціональними вузлами, блоки живлення, розподільники живлення, та інші допоміжні й з'єднувальні засоби. Описана структура забезпечує такі переваги корисної моделі мікропроцесорного керуючого обчислювального комплексу МСКУ-3 відносно розглянутих аналогів: 1) Підвищена надійність. На відміну від аналогів, у яких здійснено дублювання каналів обробки даних, у МСКУ-3 реалізована можливість створення тройованої (англ. triplicating) структури (з потрійним резервуванням) з обробкою інформації від датчиків за мажоритарним принципом "2 із 3", завдяки чому значною мірою підвищується надійність. Обґрунтування: Відповідно до методики, наведеної в публікації "Надежность технических систем. Справочник. Под ред. И.А. Ушакова. - М.: Радио и связь, 1985 г.», інтенсивність потоку відмов для системи з р робочих компонентів і n однотипних резервних компонентів визначається за формулою: 3 UA 114200 U cxi pn 1Cp n p n , де i - параметр потоку відмов компонентів (1/h), i 1 ; N! p CN ,N p! n! - сумарне число компонентів; 5 i - інтенсивність відновлення компонентів. Інтенсивність потоку відмов одного каналу введення, обробки й виведення дорівнює (схема 2оо3, N=3; р=2; n=1): МСКУ 10 15 pn 1Cp n p n 6(2МЗО МnOM )2 , (1), де МЗО - інтенсивність потоку відмов модуля зв'язку з об'єктом (МЗО), МnOM - інтенсивність потоку відмов мікропроцесорного обчислювального модуля (МnОМ); для простоти прийнято, що інтенсивності відновлення МЗО й МnОМ рівні, тобто МЗО MnOM. Інтенсивність потоку відмов МСКУ однакова для відмови типу "неспрацьовування" для відмови типу "помилкове спрацьовування". Для аналогів за тією ж методикою: а) Схема 1оо2: N=2; р=1; n=1. Для відмови типу "неспрацьовування": 2(2МЗО 2 МnOM2 ) (2) Для відмови типу "помилкове спрацьовування" відповідає пункту б); б) Схема 2оо2: N=2; р=2; n=0. Для відмови типу "неспрацьовування": Аналог 4МЗО 2МnOM (3) Для відмови типу "помилкове спрацьовування" відповідає пункту а). Аналіз формул (1), (2), (3) показує, що в порівнянні зі схемами дублювання каналів обробки сигналів у аналогах у МСКУ-3 за рахунок троювання досягається менша інтенсивність потоків Аналог 20 25 2 30 35 40 45 відмов для одного із двох типів несправностей у степеневій залежності (тому що ). 2) Збереження працездатності при будь-якому типі одиничної відмови. На відміну від аналогів, у МСКУ-3 при будь-якому типі одиничної відмови (один блок МЗО або один блок МnОМ), включаючи приховану несправність, зберігається працездатність з таких причин: а) Будь-яка відмова одного вхідного МЗО, що призводить до передачі недостовірних даних із МЗО у відповідний МnОМ, компенсується за рахунок одержання достовірних даних від двох інших МЗО у два відповідні МnОМ і вирівнювання даних від трьох МЗО в кожному МnОМ: для аналогових вхідних сигналів - за медіанною схемою із трьох; для дискретних вхідних сигналів за схемою 2 із 3 (2оо3), що приводить до автоматичної компенсації даного типу відмови й збереження роботоздатності. В аналогах, що мають дубльовану структуру каналів обробки сигналів, даний тип відмови може призводити до одержання недостовірного результуючого значення після вирівнювання в МnОМ: для аналогових вхідних сигналів - за схемою середнього арифметичного із двох; для дискретних вхідних сигналів за схемою 1 із 2 (1оо2) - для відмови типу "помилкове спрацьовування" або 2 із 2 (2оо2) - для відмови типу "неспрацьовування", залежно від проектної схеми. б) У МСКУ-3, аналогічно пункту а), забезпечується стійкість до будь-якого типу одиничної відмови в МnОМ або вихідному МЗО. В аналогах, що мають дубльовану структуру, даний тип відмови може призводити до одержання недостовірного результуючого значення вихідного сигналу. 4 UA 114200 U 5 10 15 20 25 30 35 40 45 50 55 3) Однозначне визначення модуля, що відмовив, у разі розбіжності його даних з даними двох інших модулів. У МСКУ-3 забезпечується однозначне визначення відмови модуля (МЗО або МnОМ) у будьякому каналі за рахунок виявлення розбіжності його даних (у МЗО - вимірюваного значення, у МnОМ - результату обробки) з даними двох аналогічних модулів у двох інших каналах. В аналогах же, що мають дубльовану структуру, однозначно визначити - який із двох модулів, що мають незбіжні дані один відносно іншого, відмовив, тобто формує недостовірне значення, у принципі неможливо. На базі принципу троювання структури каналів обробки сигналів заявник створив сімейство резервованих мікропроцесорних керуючих обчислювальних комплексів МСКУ-3, адаптованих до виконання різних завдань, і встановлюваних на різних об'єктах атомної енергетики й залізничного транспорту. У них реалізована можливість заміни функціональних блоків без відключення живлення ("гаряча" заміна). ПОЗИЦІЙНІ ПОЗНАЧЕННЯ 1. Первинний вимірювальний перетворювач (датчик). 2. Вхідна з'єднувальна панель. 3. Вхідний модуль зв'язку з об'єктом. 4. Мікропроцесорний обчислювальний модуль. 5. Вихідний модуль зв'язку з об'єктом. 6. Вихідна з'єднувальна панель. 7. Виконавчий пристрій. 8. Монтажний каркас. 9. Модуль контролю обладнання. 10. Кросова панель. 11. Системний джгут. 12. Послідовний радіальний інтерфейс. 13. Локальна обчислювальна мережа. 14. Розподільник сигналів часу. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 1. Мікропроцесорний керуючий обчислювальний комплекс, що містить дубльовані канали обробки сигналів від первинних вимірювальних перетворювачів, причому кожний канал містить вхідну з'єднувальну панель для приймання вхідних аналогових або дискретних сигналів, два вхідні модулі зв'язку з об'єктом для первинної обробки дискретних і аналогових сигналів, два мікропроцесорні обчислювальні модулі, два вихідні модулі зв'язку з об'єктом і вихідну з'єднувальну панель, який відрізняється тим, що містить додатковий вхідний модуль зв'язку з об'єктом, додатковий мікропроцесорний обчислювальний модуль і додатковий вихідний модуль зв'язку з об'єктом, причому вихід вхідної з'єднувальної панелі з'єднано із входами трьох вхідних модулів зв'язку з об'єктом, вихід кожного вхідного модуля зв'язку з об'єктом з'єднаний із входом відповідного мікропроцесорного обчислювального модуля, причому входи/виходи для обміну вхідними даними кожного мікропроцесорного обчислювального модуля з'єднані з виходами/входами для обміну вхідними даними кожного із двох сусідніх мікропроцесорних обчислювальних модулів, вихід кожного мікропроцесорного обчислювального модуля з'єднаний із входом відповідного вихідного модуля зв'язку з об'єктом, вихід кожного вихідного модуля зв'язку з об'єктом з'єднаний з відповідним входом вихідної з'єднувальної панелі, причому вихідна з'єднувальна панель виконана з можливістю електричного мажорування вхідних сигналів за схемою "2 із 3" і формування результуючого електричного сигналу, а вихід вихідної з'єднувальної панелі з'єднаний з відповідним виконавчим пристроєм. 2. Комплекс за п. 1, який відрізняється тим, що кожний мікропроцесорний обчислювальний модуль оснащений портами інтерфейсів Ethernet, портами оптичного інтерфейсу UART, портами внутрішнього послідовного радіального інтерфейсу й модулями для зовнішніх зв'язків інтерфейсами RS-422 і RS-485. 3. Комплекс за п. 1, який відрізняється тим, що модулі зв'язку з об'єктами оснащені портами послідовного радіального інтерфейсу. 4. Комплекс за п. 1, який відрізняється тим, що містить модулі контролю роботоздатності й стану обладнання, оснащені портами послідовного радіального інтерфейсу. 5. Комплекс за п. 1, який відрізняється тим, що конструктивно виконаний у вигляді підлогової шафи. 5 UA 114200 U 6 UA 114200 U Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05B 19/418
Мітки: комплекс, обчислювальній, мікропроцесорний, керуючий, мску-3
Код посилання
<a href="https://ua.patents.su/9-114200-mikroprocesornijj-keruyuchijj-obchislyuvalnijj-kompleks-msku-3.html" target="_blank" rel="follow" title="База патентів України">Мікропроцесорний керуючий обчислювальний комплекс мску-3</a>
Мікропроцесорний контролер з паралельною обробкою інформації

Номер патенту: 47570
Опубліковано: 10.02.2010
Автори: Желєзняк Анатолій Леонідович, Подлєсних Євгеній Геннадійович, Опанасенко Володимир Миколайович, Щербакова Ілона Олександрівна, Возненко Анатолій Дмитрович, Стасюк Олександр Іонович, Гончарова Лідія Леонідівна
МПК: G06F 9/00
Мітки: мікропроцесорний, інформації, паралельною, обробкою, контролер
Формула / Реферат:
Мікропроцесорний контролер з паралельною обробкою інформації, що містить блок пам'яті і регістр, який відрізняється тим, що в нього введено мікропроцесор, чотири дешифратори, чотирипортовий модуль, два регістри, шифратори дискретних сигналів, аналого-цифровий перетворювач, формувач аналогових сигналів, ключі, паралельний матричний процесор, формувачі управляючих сигналів, причому вихід шини адреси першого порту мікропроцесора підключений до...
Регулюючий мікропроцесорний контролер
Номер патенту: 44799
Опубліковано: 12.10.2009
Автори: Коновалов Михайло Андрійович, Голінко Ігор Михайлович, Бунке Олександр Сергійович, Ковриго Юрій Михайлович
МПК: G05B 11/00
Мітки: мікропроцесорний, регулюючий, контролер
Формула / Реферат:
Регулюючий мікропроцесорний контролер, що містить послідовно з'єднані пристрої вводу-виводу інформації, аналого-цифровий перетворювач, суматор, фільтр, цифровий обчислювальний пристрій для формування функціональної структури керування виконавчим механізмом і широтно-імпульсний модулятор, який відрізняється тим, що цифровий обчислювальний пристрій містить перший швидкодіючий канал керування; функціональна структура (ФС1) якого реалізує...
Універсальний мікропроцесорний контролер
Номер патенту: 54042
Опубліковано: 25.10.2010
Автори: Бунке Олександр Сергійович, Голінко Ігор Михайлович, Ковриго Юрій Михайлович, Коновалов Михайло Андрійович
МПК: G05B 11/00
Мітки: контролер, мікропроцесорний, універсальний
Формула / Реферат:
Універсальний мікропроцесорний контролер, який містить послідовно з'єднані пристрої вводу-виводу інформації, аналого-цифровий перетворювач, перший перетворювач-суматор, фільтр, другий суматор, цифровий обчислювальний пристрій та вихідний елемент для формування основного закону керування виконавчим механізмом, який відрізняється тим, що функціональна структура універсального мікропроцесорного контролера містить трипозиційний нелінійний...
Мікропроцесорний пристрій захисту й контролю роботи механізмів мостових кранів
Номер патенту: 57816
Опубліковано: 10.03.2011
Автори: Коротченков Валерій Михайлович, Хижняк Вячеслав Якович, Бесараб Сергій Михайлович, Вайнер Аркадій Йосипович, Ткаченко Григорій Іванович, Мохнатий Олексій Володимирович, Денисик Дмитро Ігорович
МПК: B66C 23/88, B66C 13/18
Мітки: механізмів, кранів, роботи, пристрій, мостових, контролю, мікропроцесорний, захисту
Формула / Реферат:
1. Мікропроцесорний пристрій захисту і контролю роботи механізмів мостових кранів, що містить блок датчиків параметрів крана, блок обробки даних і блок контролю, реєстрації та зберігання даних про роботу крана, який відрізняється тим, що він додатково оснащений блоком (5) гальванорозв'язки і нормалізації вхідних-вихідних сигналів контролера (6), блоком (1) динамічного гальмування, підключеним входами до ліній живлення крана, а виходами до...
Обчислювальний перетворювач “робочий код – цифровий еквівалент”
Номер патенту: 61610
Опубліковано: 25.07.2011
Автори: Дудник Олександр Вікторович, Азаров Олексій Дмитрович, Кадук Олександр Володимирович, Росощук Анастасія Володимирівна
Мітки: обчислювальній, перетворювач, цифровий, еквівалент, робочий, код
Формула / Реферат:
Обчислювальний перетворювач "робочий код - цифровий еквівалент", який містить n-розрядний регістр, двійковий суматор, причому вхід n-розрядного регістра є входом перетворювача, а вихід двійкового суматора є виходом перетворювача, який відрізняється тим, що введено блок керування, блок оперативної пам'яті, цифровий комутатор, причому вхід цифрового комутатора з'єднано з виходами оперативної пам'яті та блока керування, вихід...
Попередній патент: Електрогідравлічний привід
Наступний патент: Герметичний люк
Випадковий патент: Борофосфатне скломастило для гарячої обробки металів тиском