Кліщовий захват

Формула / Реферат
Клещевой захват, содержащий соединенные посредством общего горизонтального пальца перекрестно расположенные двуплечие рычаги, подвесной орган, шарнирные тяги, верхние концы которых соединены с подвесным органом, а нижние - с верхними плечами двуплечих рычагов, и механизм фиксации положения двуплечих рычагов, включающий шарнирно закрепленные на подвесном органе и расположенные вертикально крюки, выполненные со скошенной от вертикальной оси симметрии двуплечих рычагов внутренней поверхностью, закрепленную на горизонтальном пальце вертикальную штангу, расположенную между крюками, расположенную с ее обхватом верхнюю втулку, выполненную конический, обращенную большим основаним вниз для взаимодействия с крюками, и нижнюю втулку, отличающийся тем, что подвесной орган выполнен с центральным круглым отверстием с возможностью обхвата штанги, свободного осевого перемещения и кругового поворота вокруг последней, устройство снабжено противовесом, в круглом отверстии которого расположена штанга, с возможностью свободного осевого перемещения и кругового поворота вокруг последней, шарнирными серьгами, одни концы которых закреплены на крюках, а другие - на противовесе, нижняя конусная втулка, обращенная большим основанием вверх, расположена на вертикальной штанге с возможностью свободного перемещения вдоль нее, направляющим полым коническим элементом, обращенным большим основанием вверх и жестко закрепленным на вертикальной штанге с возможностью торможения привалочных поверхностей при фиксации груза, нижние плечи двуплечих рычагов содержат упоры с возможостью ограничения погружения их относительно верхней плоскости зачалочных отверстий и ориентирования длинномерного груза относительно вертикальной оси устройства.
Текст
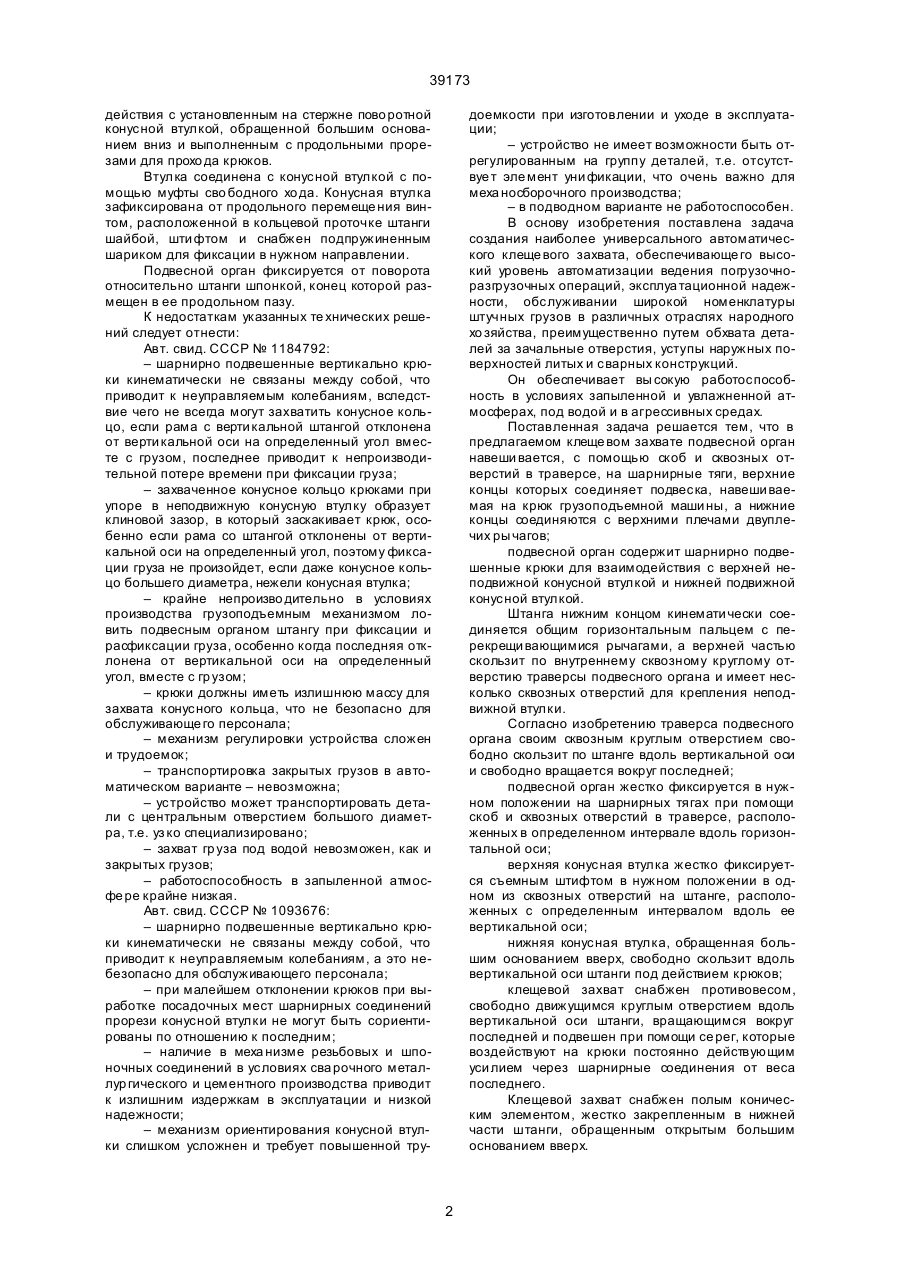
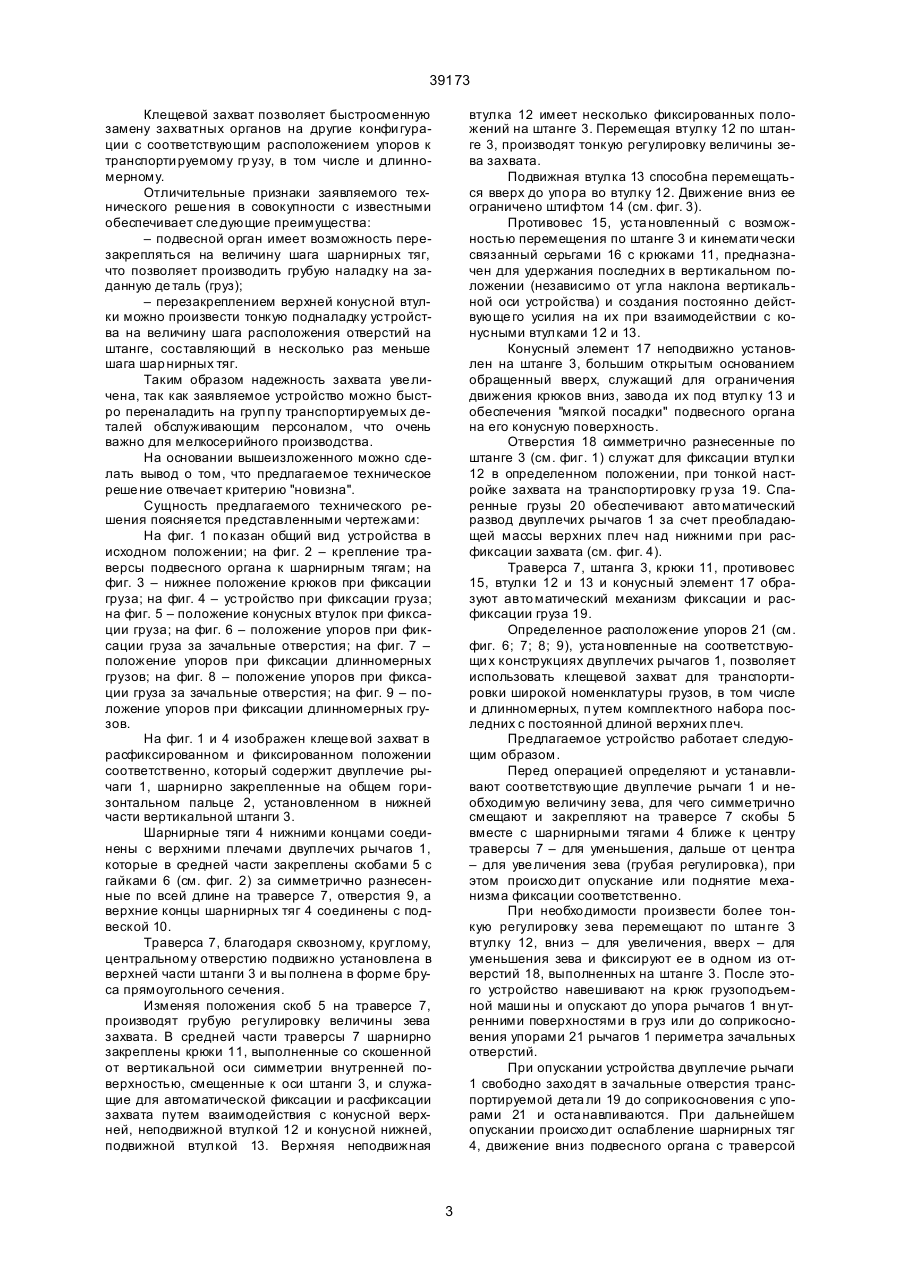
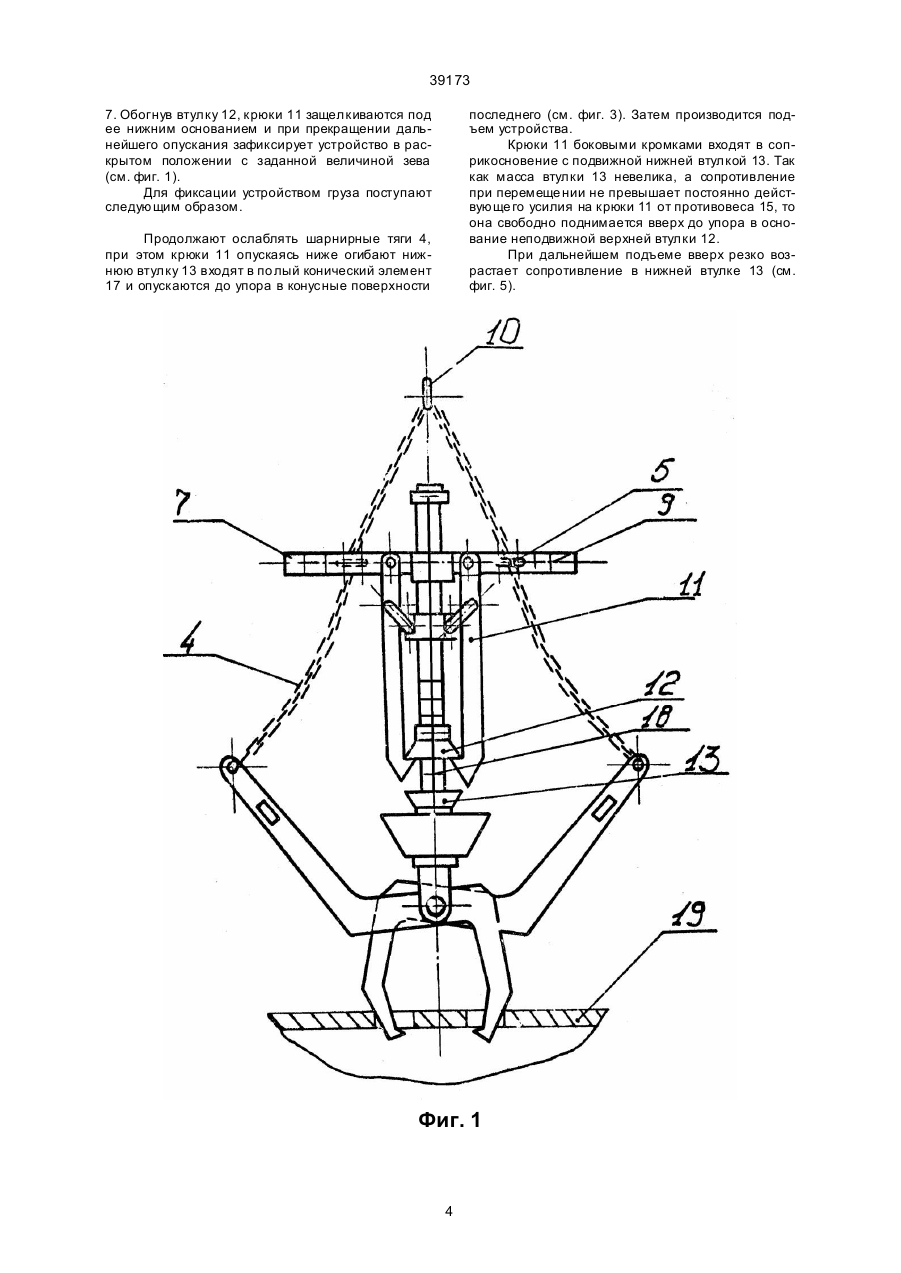
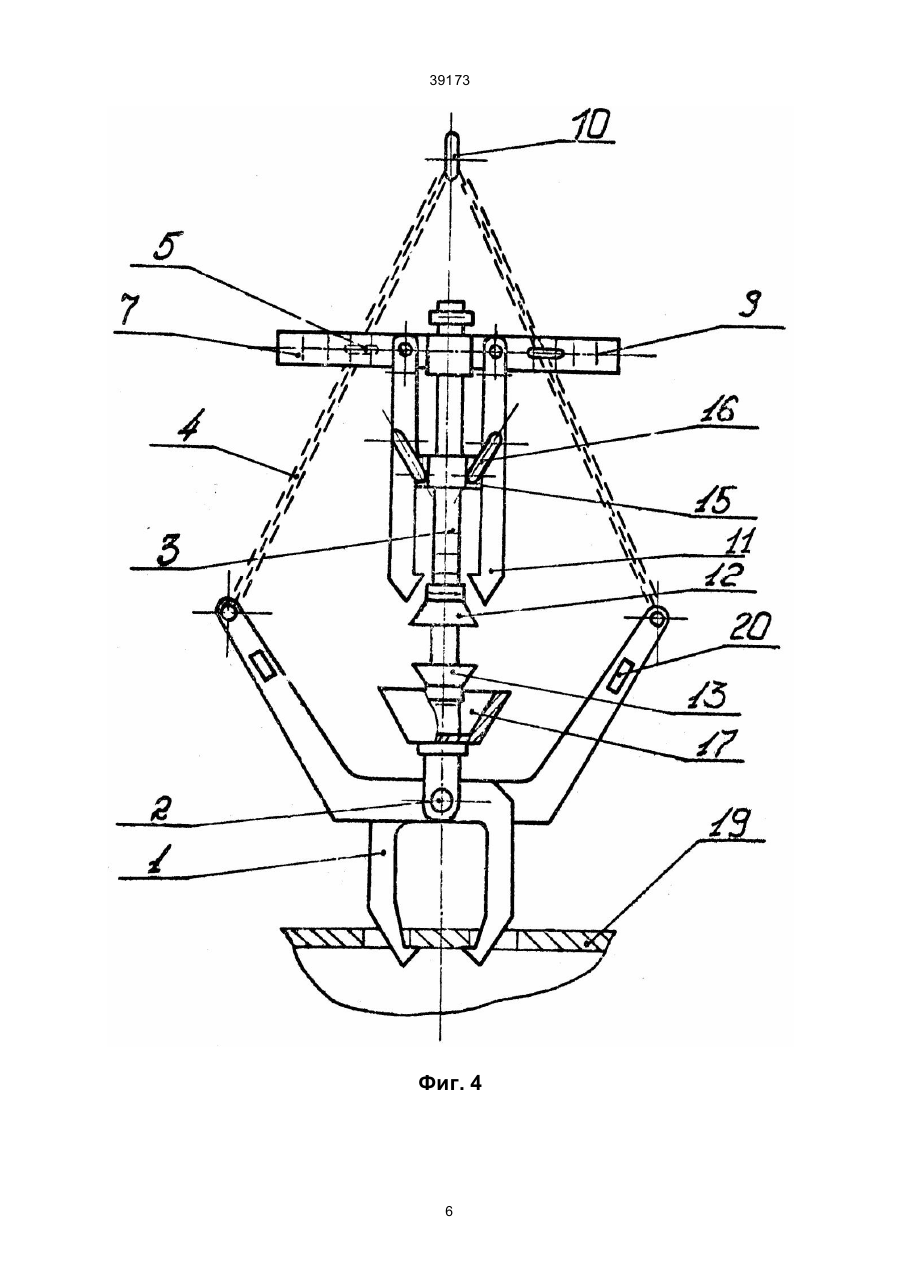
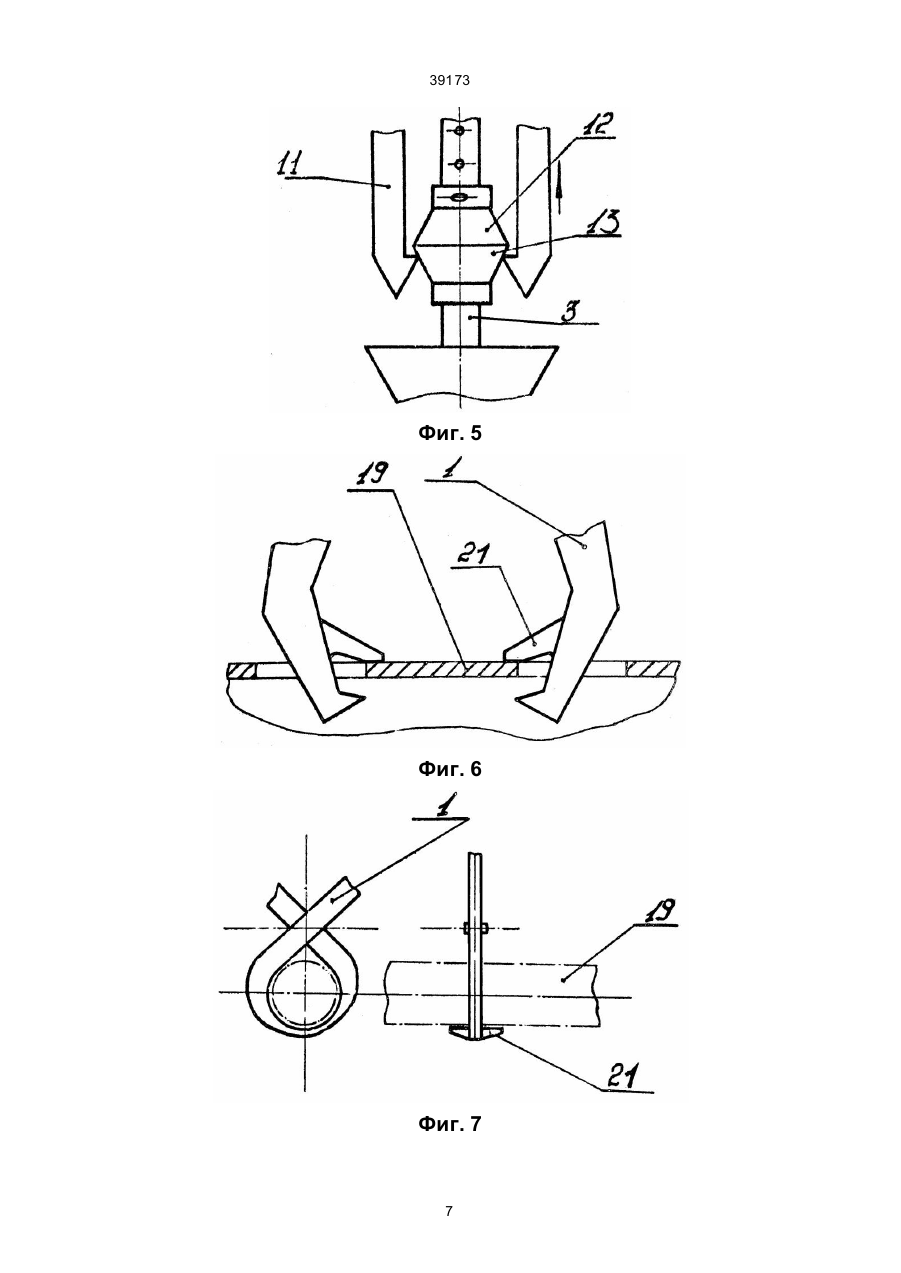
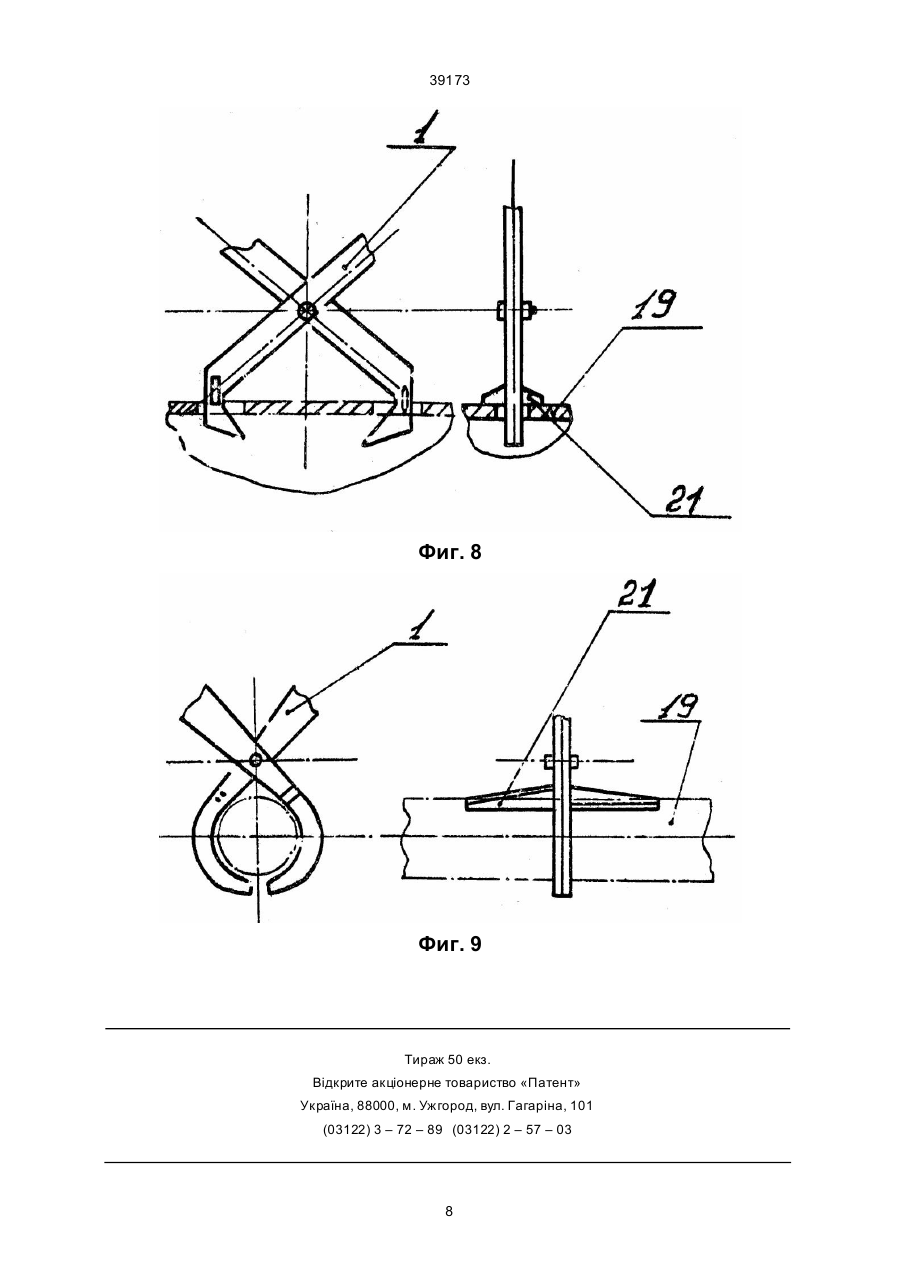
Клещевой захват, содержащий соединенные посредством общего горизонтального пальца перекрестно расположенные двуплечие рычаги, подвесной орган, шарнирные тяги, верхние концы которых соединены с подвесным органом, а нижние - с верхними плечами двуплечих рычагов, и механизм фиксации положения двуплечих рычагов, включающий шарнирно закрепленные на подвесном органе и расположенные вертикально крюки, выполненные со скошенной от вертикальной оси симметрии двуплечих рычагов внутренней поверхностью, закрепленную на горизонтальном пальце вертикальную штангу, расположенную между крюками, расположенную с ее обхватом верхнюю втулку, выполненную конической, обращенную большим основанием вниз для взаимодейст C2 (54) КЛІЩОВИЙ ЗАХВАТ 39173 действия с установленным на стержне пово ротной конусной втулкой, обращенной большим основанием вниз и выполненным с продольными прорезами для прохо да крюков. Втулка соединена с конусной втулкой с помощью муфты сво бодного хо да. Конусная втулка зафиксирована от продольного перемеще ния винтом, расположенной в кольцевой проточке штанги шайбой, шти фтом и снабжен подпружиненным шариком для фиксации в нужном направлении. Подвесной орган фиксируется от поворота относительно штанги шпонкой, конец которой размещен в ее продольном пазу. К недостаткам указанных те хнических решений следует отнести: Авт. свид. СССР № 1184792: – шарнирно подвешенные вертикально крюки кинематически не связаны между собой, что приводит к неуправляемым колебаниям, вследствие чего не всегда могут захватить конусное кольцо, если рама с верти кальной штангой отклонена от верти кальной оси на определенный угол вместе с грузом, последнее приводит к непроизводительной потере времени при фиксации груза; – захваченное конусное кольцо крюками при упоре в неподвижную конусную втулку образует клиновой зазор, в который заскакивает крюк, особенно если рама со штангой отклонены от вертикальной оси на определенный угол, поэтому фиксации груза не произойдет, если даже конусное кольцо большего диаметра, нежели конусная втулка; – крайне непроизво дительно в условиях производства грузоподъемным механизмом ловить подвесным органом штангу при фиксации и расфиксации груза, особенно когда последняя отклонена от вертикальной оси на определенный угол, вместе с гр узом; – крюки должны иметь излишнюю массу для захвата конусного кольца, что не безопасно для обслуживающе го персонала; – механизм регулировки устройства сложен и трудоемок; – транспортировка закрытых грузов в автоматическом варианте – невозможна; – устройство может транспортировать детали с центральным отверстием большого диаметра, т.е. уз ко специализировано; – захват гр уза под водой невозможен, как и закрытых грузов; – работоспособность в запыленной атмосфе ре крайне низкая. Aвт. свид. CCCP № 1093676: – шарнирно подвешенные вертикально крюки кинематически не связаны между собой, что приводит к неуправляемым колебаниям, а это небезопасно для обслуживающего персонала; – при малейшем отклонении крюков при выработке посадочных мест шарнирных соединений прорези конусной втулки не могут быть сориентированы по отношению к последним; – наличие в меха низме резьбовых и шпоночных соединений в условиях сва рочного металлур гического и цементного производства приводит к излишним издержкам в эксплуатации и низкой надежности; – механизм ориентирования конусной втулки слишком усложнен и требует повышенной тру доемкости при изготовлении и уходе в эксплуатации; – устройство не имеет возможности быть отрегулированным на группу деталей, т.е. отсутствуе т эле мент уни фикации, что очень важно для меха носборочного производства; – в подводном варианте не работоспособен. В основу изобретения поставлена задача создания наиболее универсального автоматического клеще вого захвата, обеспечивающе го высокий уровень автоматизации ведения погрузочноразгрузочных операций, эксплуа тационной надежности, обслуживании широкой номенклатуры штучных грузов в различных отраслях народного хо зяйства, преимущественно путем обхвата деталей за зачальные отверстия, уступы наружных поверхностей литых и сварных конструкций. Он обеспечивает вы сокую работоспособность в условиях запыленной и увлажненной атмосферах, под водой и в агрессивных средах. Поставленная задача решается тем, что в предлагаемом клеще вом захвате подвесной орган навеши вается, с помощью скоб и сквозных отверстий в траверсе, на шарнирные тяги, верхние концы которых соединяет подвеска, навеши ваемая на крюк грузоподъемной маши ны, а нижние концы соединяются с верхними плечами двуплечих ры чагов; подвесной орган содержит шарнирно подвешенные крюки для взаимодействия с верхней неподвижной конусной втулкой и нижней подвижной конусной втулкой. Штанга нижним концом кинемати чески соединяется общим горизонтальным пальцем с перекрещи вающимися рычагами, а верхней частью скользит по внутреннему сквозному круглому отверстию траверсы подвесного органа и имеет несколько сквозных отверстий для крепления неподвижной втулки. Согласно изобретению траверса подвесного органа своим сквозным круглым отверстием свободно скользит по штанге вдоль вертикальной оси и свободно вращается вокруг последней; подвесной орган жестко фиксируется в нужном положении на шарнирных тягах при помощи скоб и сквозных отверстий в траверсе, расположенных в определенном интервале вдоль горизонтальной оси; верхняя конусная втулка жестко фиксируется съемным штифтом в нужном положении в одном из сквозных отверстий на штанге, расположенных с определенным интервалом вдоль ее вертикальной оси; нижняя конусная втулка, обращенная большим основанием вверх, свободно скользит вдоль вертикальной оси штанги под действием крюков; клещевой захват снабжен противовесом, свободно движущимся круглым отверстием вдоль вертикальной оси штанги, вращающимся вокруг последней и подвешен при помощи се рег, которые воздействуют на крюки постоянно действующим уси лием через шарнирные соединения от веса последнего. Клещевой захват снабжен полым коническим элементом, жестко закрепленным в нижней части штанги, обращенным открытым большим основанием вверх. 2 39173 Клещевой захват позволяет быстросменную замену захватных органов на другие конфи гурации с соответствующим расположением упоров к транспорти руемому гр узу, в том числе и длинномерному. Отличительные признаки заявляемого технического реше ния в совокупности с известными обеспечивает сле дующие преимущества: – подвесной орган имеет возможность перезакрепляться на величину шага шарнирных тяг, что позволяет производить грубую наладку на заданную де таль (груз); – перезакреплением верхней конусной втулки можно произвести тонкую подналадку устройства на величину шага расположения отверстий на штанге, составляющий в несколько раз меньше шага шар нирных тяг. Таким образом надежность захвата уве личена, так как заявляемое устройство можно быстро переналадить на груп пу транспортируемых деталей обслуживающим персоналом, что очень важно для мелкосерийного производства. На основании вышеизложенного можно сделать вывод о том, что предлагаемое техническое реше ние отвечает критерию "новизна". Сущность предлагаемого технического решения поясняется представленными чертежами: На фиг. 1 по казан общий вид устройства в исходном положении; на фиг. 2 – крепление траверсы подвесного органа к шарнирным тягам; на фиг. 3 – нижнее положение крюков при фиксации груза; на фиг. 4 – устройство при фиксации груза; на фиг. 5 – положение конусных втулок при фиксации груза; на фиг. 6 – положение упоров при фиксации груза за зачальные отверстия; на фиг. 7 – положение упоров при фиксации длинномерных грузов; на фиг. 8 – положение упоров при фиксации груза за зачальные отверстия; на фиг. 9 – положение упоров при фиксации длинномерных грузов. На фиг. 1 и 4 изображен клеще вой захват в расфиксированном и фиксированном положении соответственно, который содержит двуплечие рычаги 1, шарнирно закрепленные на общем горизонтальном пальце 2, установленном в нижней части вертикальной штанги 3. Шарнирные тяги 4 нижними концами соединены с верхними плечами двуплечих рычагов 1, которые в средней части закреплены скобами 5 с гайками 6 (см. фиг. 2) за симметрично разнесенные по всей длине на траверсе 7, отверстия 9, а верхние концы шарнирных тяг 4 соединены с подвеской 10. Траверса 7, благодаря сквозному, круглому, центральному отверстию подвижно установлена в верхней части штанги 3 и вы полнена в форме бруса прямоугольного сечения. Изменяя положения скоб 5 на траверсе 7, производят грубую регулировку величины зева захвата. В средней части траверсы 7 шарнирно закреплены крюки 11, выполненные со скошенной от вертикальной оси симметрии внутренней поверхностью, смещенные к оси штанги 3, и служащие для автоматической фиксации и расфиксации захвата путем взаимодействия с конусной верхней, неподвижной втулкой 12 и конусной нижней, подвижной втулкой 13. Верхняя неподвижная втулка 12 имеет несколько фиксированных положений на штанге 3. Перемещая втулку 12 по штанге 3, производят тонкую регулировку величины зева захвата. Подвижная втулка 13 способна перемещаться вверх до упора во втулку 12. Движение вниз ее ограничено штифтом 14 (см. фиг. 3). Противовес 15, уста новленный с возможностью перемещения по штанге 3 и кинемати чески связанный серьгами 16 с крюками 11, предназначен для удержания последних в вертикальном положении (независимо от угла наклона вертикальной оси устройства) и создания постоянно действующе го усилия на их при взаимодействии с конусными втулками 12 и 13. Конусный элемент 17 неподвижно установлен на штанге 3, большим открытым основанием обращенный вверх, служащий для ограничения движения крюков вниз, заво да их под втулку 13 и обеспечения "мягкой посадки" подвесного органа на его конусную поверхность. Отверстия 18 симметрично разнесенные по штанге 3 (см. фиг. 1) служат для фиксации втулки 12 в определенном положении, при тонкой настройке захвата на транспортировку гр уза 19. Спаренные грузы 20 обеспечивают авто матический развод двуплечих рычагов 1 за счет преобладающей массы верхних плеч над нижними при расфиксации захвата (см. фиг. 4). Траверса 7, штанга 3, крюки 11, противовес 15, втулки 12 и 13 и конусный элемент 17 образуют авто матический механизм фиксации и расфиксации груза 19. Определенное расположение упоров 21 (см. фиг. 6; 7; 8; 9), уста новленные на соответствующи х конструкциях двуплечих рычагов 1, позволяет использовать клещевой захват для транспортировки широкой номенклатуры грузов, в том числе и длинномерных, п утем комплектного набора последних с постоянной длиной верхних плеч. Предлагаемое устройство работает следующим образом. Перед операцией определяют и устанавливают соответствующие двуплечие рычаги 1 и необходимую величину зева, для чего симметрично смещают и закрепляют на траверсе 7 скобы 5 вместе с шарнирными тягами 4 ближе к центру траверсы 7 – для уменьшения, дальше от центра – для уве личения зева (грубая регулировка), при этом происхо дит опускание или поднятие механизма фиксации соответственно. При необхо димости произвести более тонкую регулировку зева перемещают по штан ге 3 втулку 12, вниз – для увеличения, вверх – для уменьшения зева и фиксируют ее в одном из отверстий 18, выполненных на штанге 3. После этого устройство навешивают на крюк грузоподъемной маши ны и опускают до упора рычагов 1 вн утренними поверхностями в груз или до соприкосновения упорами 21 рычагов 1 периметра зачальных отверстий. При опускании устройства двуплечие рычаги 1 свободно захо дят в зачальные отверстия транспортируемой дета ли 19 до соприкосновения с упорами 21 и оста навливаются. При дальнейшем опускании происхо дит ослабление шарнирных тяг 4, движение вниз подвесного органа с траверсой 3 39173 7. Обогнув втулку 12, крюки 11 защелкиваются под ее нижним основанием и при прекращении дальнейшего опускания зафиксирует устройство в раскрытом положении с заданной величиной зева (см. фиг. 1). Для фиксации устройством груза поступают следующим образом. последнего (см. фиг. 3). Затем производится подъем устройства. Крюки 11 боковыми кромками входят в соприкосновение с подвижной нижней втулкой 13. Так как масса втулки 13 невелика, а сопротивление при перемеще нии не превышает постоянно действующе го усилия на крюки 11 от противовеса 15, то она свободно поднимается вверх до упора в основание неподвижной верхней втулки 12. При дальнейшем подъеме вверх резко возрастает сопротивление в нижней втулке 13 (см. фиг. 5). Продолжают ослаблять шарнирные тяги 4, при этом крюки 11 опускаясь ниже огибают нижнюю втулку 13 входят в по лый конический элемент 17 и опускаются до упора в конусные поверхности Фиг. 1 4 39173 Фиг. 2 Фиг. 3 5 39173 Фиг. 4 6 39173 Фиг. 5 Фиг. 6 Фиг. 7 7 39173 Фиг. 8 Фиг. 9 Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122) 3 – 72 – 89 (03122) 2 – 57 – 03 8 39173 9
ДивитисяДодаткова інформація
Назва патенту англійськоюClip-on chuck
Автори англійськоюStulishaiko Ivan Maksymovych
Назва патенту російськоюКлещевой захват
Автори російськоюСтулишайко Иван Максимович
МПК / Мітки
МПК: B66C 1/42
Код посилання
<a href="https://ua.patents.su/9-39173-klishhovijj-zakhvat.html" target="_blank" rel="follow" title="База патентів України">Кліщовий захват</a>
Важільно-кліщовий захват
Номер патенту: 10402
Опубліковано: 25.12.1996
Автори: Бать Юрій Ізраілевич, Бать Сергій Юрійович, Кочевенко Іван Іванович, Тітієвський Володимир Маркович, Маляренко Анатолій Павлович
МПК: B66C 1/42
Мітки: захват, важільно-кліщовий
Формула / Реферат:
Рычажно-клещевой захват, преимущественно для кольцевых грузов, размещенных на вертикальном стержне, содержащий распорную планку, на концах которой шарнирно закреплены двуплечие рычаги, и зажимные колодки, отличающийся тем, что на концах двуплечих рычагов шарнирно с возможностью поворота в вертикальной плоскости закреплены балансирные подвески, а зажимные колодки шарнирно с возможностью поворота в горизонтальной плоскости закреплены на...
Кліщовий захват захоплювальної балки

Номер патенту: 704
Опубліковано: 15.12.2000
Автор: Ільяшенко Леонід Петрович
МПК: B66C 1/62
Мітки: захват, балки, захоплювальної, кліщовий
Формула / Реферат:
Кліщовий захват захоплювальної балки, що містить корпус із симетрично встановленими в ньому на осях клішнями і запірним клином, керуючий важіль, що розміщений між напрямними, шарнірно з'єднаний із запірним клином, противагу, що жорстко закріплена на одному кінці керуючого важеля і підвішена на гнучкому елементі до захоплювальної балки, між противагою і запірним клином установлений висувний упор, а на другому кінці керуючого важеля закріплений...
Захват маніпулятора

Номер патенту: 7396
Опубліковано: 29.09.1995
Автори: Брязкало Вадим Вадимович, Цейтлін Генріх Юхимович, Ткаченко Іван Павлович, Марченко Володимир Петрович
МПК: A21C 15/00, B25J 15/00
Мітки: захват, маніпулятора
Формула / Реферат:
Захват манипулятора, преимущественно для пирожных, содержащий захватные головки, смонтированные посредством штанг на шарнирно-рычажном механизме и имеющие привод для изменения расстояния между ними, отличающийся тем, что, с целью повышения надежности работы, каждая захватная головка содержит пару двуплечих рычагов, закрепленных на соответствующей штанге шарнирно-рычажного механизма, при этом захватные головки снабжены общим приводом для...
Автоматичний магнітний захват
Номер патенту: 9533
Опубліковано: 30.09.1996
Автори: Козлов Михайло Іванович, Гордієнко Микола Іванович
МПК: B66C 1/00
Мітки: автоматичний, магнітний, захват
Формула / Реферат:
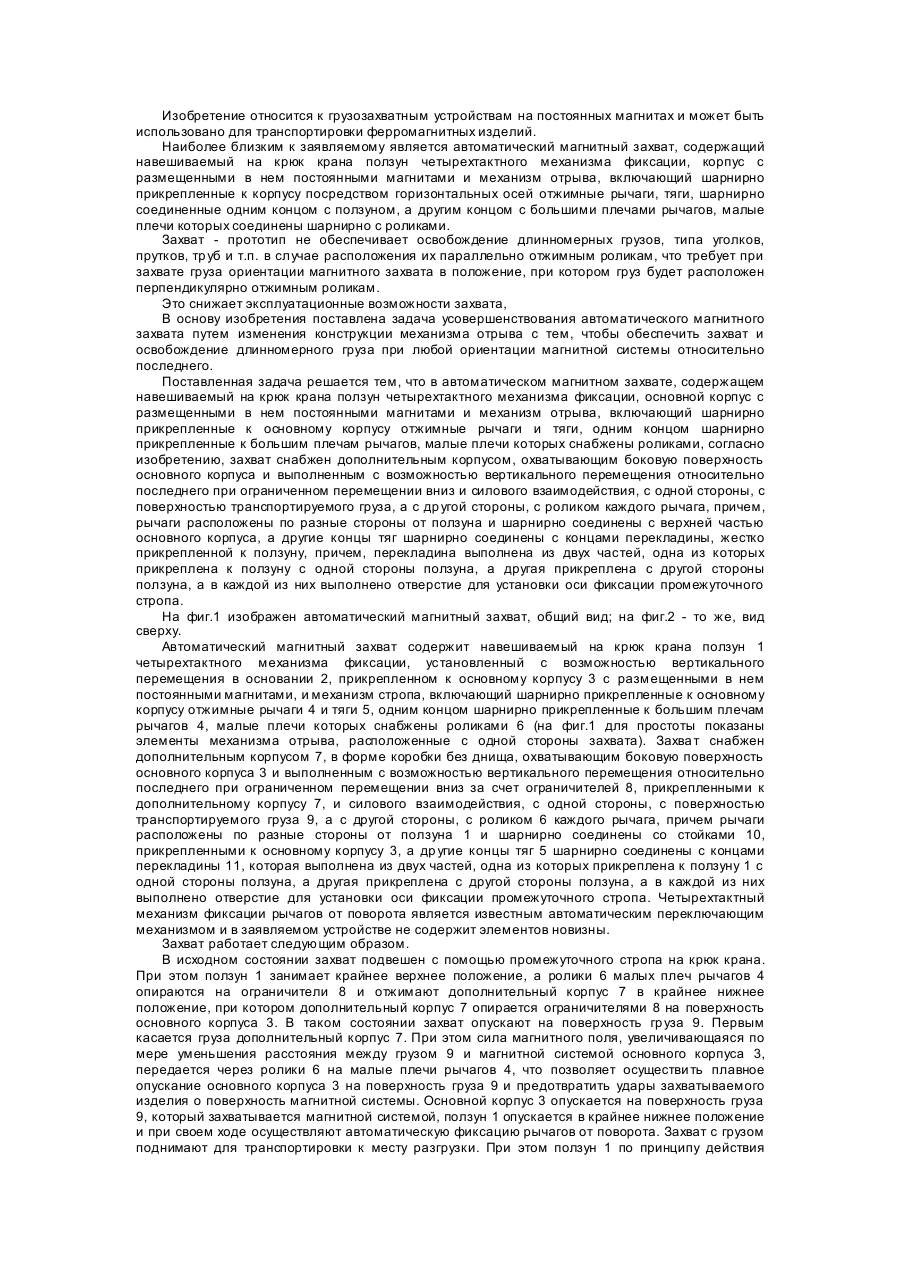
Автоматический магнитный захват, содержащий навешиваемый на крюк крана ползун четырехтактного механизма фиксации, основной корпус с размещенными в нем постоянными магнитами и механизм отрыва, включающий шарнирно прикрепленные к основному корпусу отжимные рычаги и тяги, одним концом шарнирно прикрепленные к большим плечам рычагов, малые плечи которых снабжены роликами, отличающийся тем, что захват снабжен дополнительным корпусом,...
Штирьовий захват до навантажувача
Номер патенту: 3759
Опубліковано: 27.12.1994
Автор: Рахманов Микола Миколайович
МПК: B66F 9/18
Мітки: штирьовий, навантажувача, захват
Формула / Реферат:
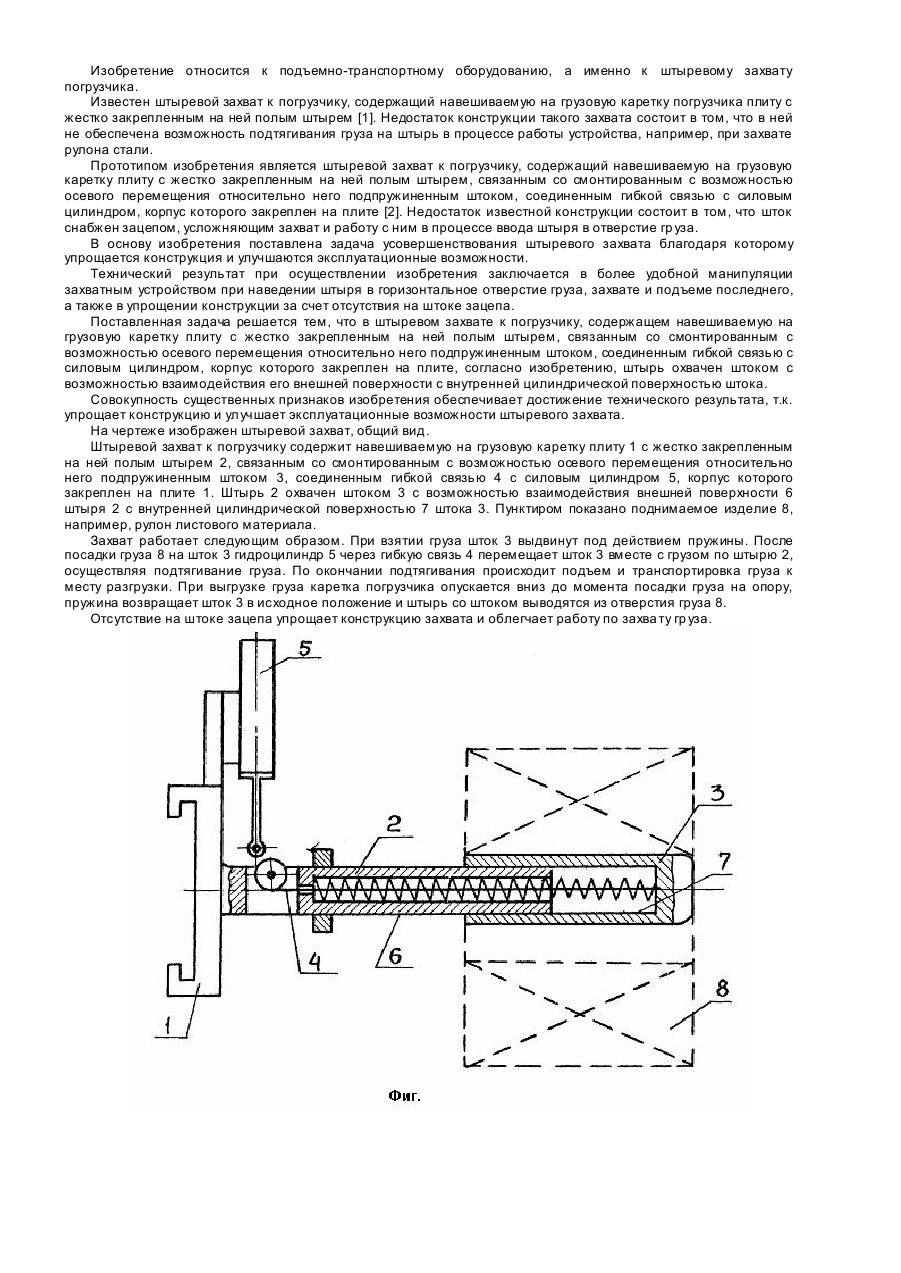
Штыревой захват к погрузчику, содержащий навешиваемую на грузовую каретку плиту с жестко закрепленным на ней полым штырем, связанным со смонтированным с возможностью осевого перемещения относительно него подпружиненным штоком, соединенным гибкой связью с силовым цилиндром, корпус которого закреплен на плите, отличающийся тем, что штырь охвачен указанным штоком с возможностью взаимодействия его внешней поверхности с внутренней цилиндрической...
Попередній патент: Похідні 2-(2,6-дигалофеніламіно) фенілоцтової кислоти і спосіб їх одержання
Наступний патент: Пристрій для фізіологічного масажу акомодаційного м’яза
Випадковий патент: Пластинчастий конвеєр