Система автоматичного керування швидкістю руху підводного апарата на базі регулятора з передбаченням
Формула / Реферат
Система автоматичного керування швидкістю руху підводного апарата на базі регулятора з передбаченням, яка містить задавач вхідного сигналу, датчик швидкості, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що до неї додатково введено перший блок затримки вихідного сигналу, зв'язаний з датчиком швидкості, другий блок затримки вихідного сигналу, зв'язаний з першим блоком затримки, перший обчислювач, зв'язаний входами з датчиком швидкості, першим і другим блоками затримки вихідного сигналу, другим обчислювачем та задавачем вхідного сигналу, виходами - з силовим перетворювачем і другим обчислювачем та оснащений програмою на базі алгоритму оптимізації - пошуку мінімуму середньоквадратичної похибки, другий обчислювач, зв'язаний входами і виходом з першим обчислювачем і оснащений програмою на базі штучних нейронних мереж, що відтворює модель динаміки об'єкта.
Текст
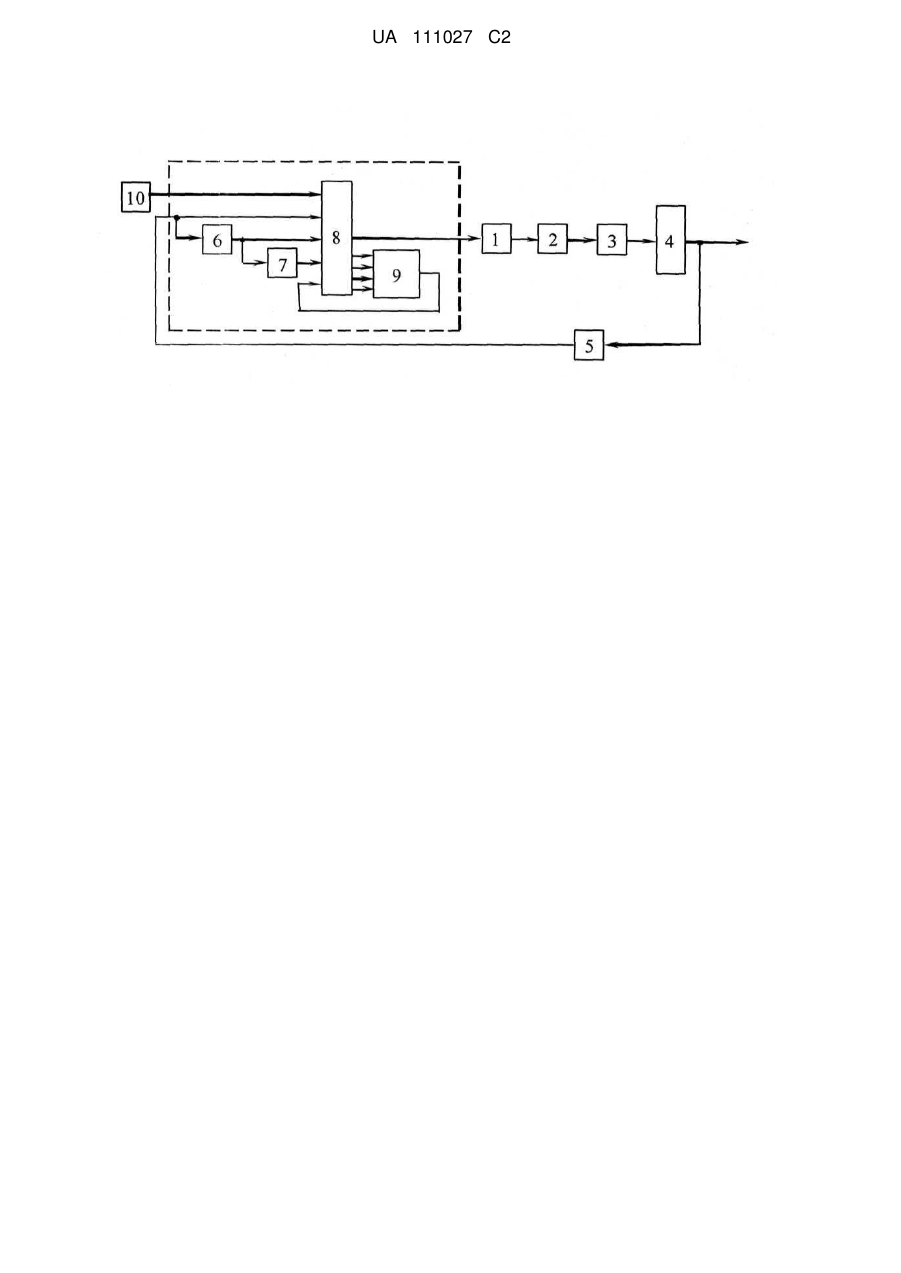
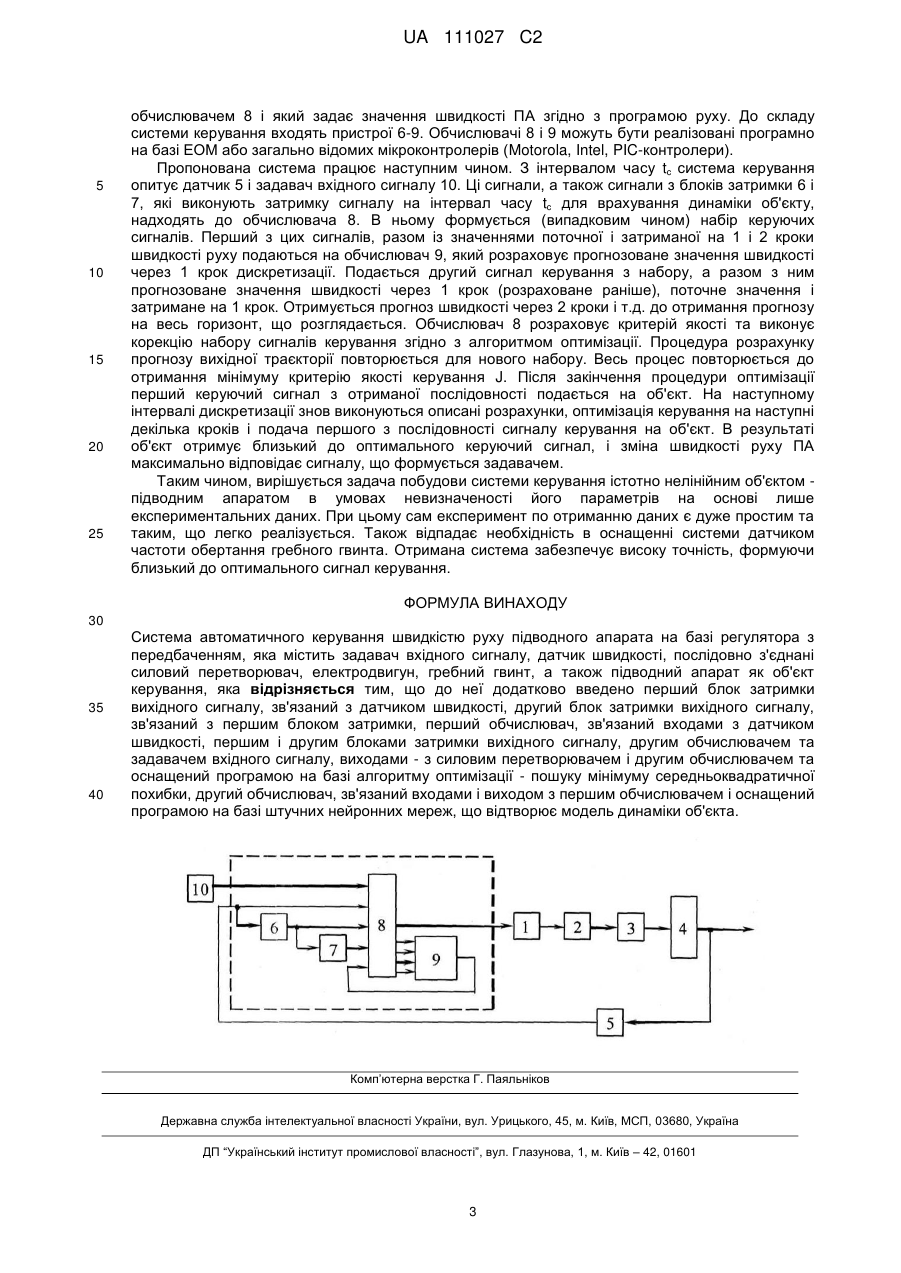
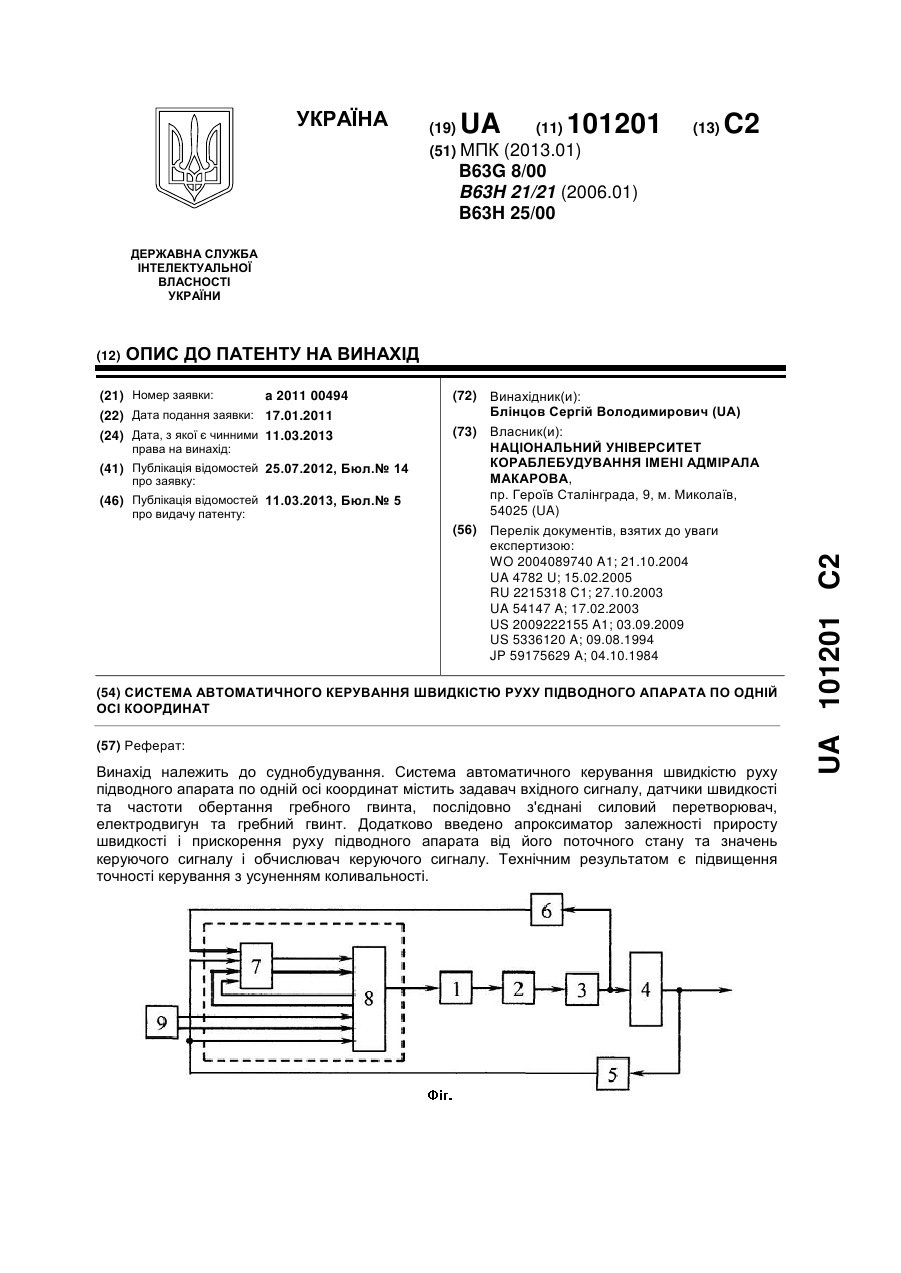
Реферат: Винахід належить до суднобудування. Система автоматичного керування швидкістю руху підводного апарата на базі регулятора з передбаченням містить задавач вхідного сигналу, датчик швидкості, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт. Додатково введені перший блок затримки вихідного сигналу, зв'язаний з датчиком швидкості, другий блок затримки вихідного сигналу, зв'язаний з першим блоком затримки, перший обчислювач, зв'язаний входами з датчиком швидкості, першим і другим блоками затримки вихідного сигналу, другим обчислювачем та задавачем вхідного сигналу, виходами - з силовим перетворювачем і другим обчислювачем та оснащений програмою на базі алгоритму оптимізації. Передбачений другий обчислювач, зв'язаний входами і виходом з першим обчислювачем і оснащений програмою на базі штучних нейронних мереж, що відтворює модель динаміки об'єкта. Технічним результатом є спрощення процесу керування та вилучення з системи датчика частоти обертання гребного гвинта. UA 111027 C2 (12) UA 111027 C2 UA 111027 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до галузі суднобудування і може бути застосований на підводних апаратах (ПА), які використовують як рушій для переміщення по деякій осі координат (горизонтальний, вертикальний або лаговий рух) гребний гвинт з електричним приводом, та до яких висуваються вимоги високої точності керування швидкістю руху в умовах невизначеності параметрів ПА. Відомо про адаптивну систему із змінною структурою для керування швидкістю руху підводного робота [Юхимец Д.А., Филаретов В.Ф., патент RU 2215318, опубл. 27.10.2003]. Такий пристрій містить послідовно з'єднані перший блок множення, перший суматор, перший релейний елемент, фільтр, блок виділення модуля, вимірник неузгодженості, ключ, другий вхід якого через другий релейний елемент приєднаний до виходу першого блока виділення модуля, інтегратор, другий суматор, другий вхід якого з'єднаний з виходом джерела еталонного сигналу й другим входом першого вимірника неузгодженості, а його вихід з'єднаний з першим входом першого блока множення, послідовно з'єднані третій суматор, перший вхід якого з'єднаний із входом системи, другий блок виділення модуля, другий блок множення, другий вхід якого з'єднаний з виходом першого релейного елемента, і четвертий суматор, а також датчик прискорення руху підводного робота, установлений на корпусі підводного робота, що підключений до другого входу першого суматора, причому другий вхід першого блока множення з'єднаний із входом другого блока виділення модуля, послідовно з'єднані третій блок виділення модуля, третій блок множення, п'ятий суматор, другий вхід якого підключений до виходу датчика швидкості руху підводного робота, установленого на корпусі підводного робота, входу третього блока виділення модуля й другому входу третього суматора, шостий суматор, другий вхід якого з'єднаний з виходом четвертого блока множення, п'ятий блок множення, сьомий суматор, підсилювач, двигун і гвинт, жорстко пов'язаний з валом двигуна, а також послідовно з'єднані датчик швидкості обертання вала двигуна, установлений на цьому валу, четвертий блок виділення модуля, восьмий суматор, шостий блок множення, дев'ятий суматор, перший нелінійний елемент, другий нелінійний елемент, вхід якого підключений до другого входу четвертого блока множення, перший блок ділення, другий вхід якого з'єднаний з виходом десятого суматора, перший вхід якого підключений до виходу п'ятого суматора й через квадратор - до другого входу дев'ятого суматора, сьомий блок множення, другий вхід якого з'єднаний з виходом четвертого блоку виділення модуля, другим входом п'ятого блоку множення й першим входом восьмого блока множення, вихід якого підключений до другого входу сьомого суматора, одинадцятий суматор, другий вхід якого з'єднаний з виходом шостого суматора, а третій вхід - із третім входом шостого суматора, другим входом десятого суматора, другим входом восьмого блока множення й виходом восьмого суматора, дев'ятий блок множення, другий вхід якого підключений до другого входу четвертого блока множення, другого входу третього блока множення й через третій релейний елемент - до виходу датчика швидкості обертання вала двигуна, третього входу сьомого суматора, четвертого входу одинадцятого суматора, другого входу восьмого суматора, другого входу шостого блока множення й третього входу п'ятого суматора, третій нелінійний елемент, другий блок розподілу, вихід якого з'єднаний із четвертим входом сьомого суматора, а другий вхід -з виходом дванадцятого суматора, перший вхід якого підключений до виходу четвертого суматора, а другий вхід - до виходу п'ятого блока множення й другого входу четвертого суматора. У вказаній адаптивній системі визначення керуючого сигналу проводиться на основі математичної моделі об'єкта з урахуванням нелінійностей. Основною проблемою є висока складність синтезу системи керування і визначення її коефіцієнтів, а також параметрів моделі, що унеможливлює синтез такої системи керування в умовах невизначеності цих параметрів. Найбільш близьким аналогом є система автоматичного керування швидкістю руху підводного апарата по одній осі координат [Блінцов С.В., патент UA 101201 С2, опубл. 11.03.2001]. Такий пристрій містить задавач вхідного сигналу, датчики швидкості й частоти обертання гребного гвинта, апроксиматор залежності приросту швидкості і прискорення руху ПА від його поточного стану та значень керуючого сигналу, зв'язаний з датчиками швидкості й частоти обертання гребного гвинта і оснащений програмою на базі штучних нейронних мереж, яка апроксимує вказану залежність на основі попередньо отриманих даних по швидкості і прискоренню підводного апарата, частоті обертання гребного гвинта та значеннях керуючої напруги, обчислювач керуючого сигналу, входи якого зв'язані з апроксиматором, датчиком швидкості і задавачем вхідного сигналу, а вихід - з силовим перетворювачем, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, а також ПА як об'єкт керування. Така система керування може бути синтезована в умовах невизначеності параметрів математичної моделі ПА, але вона потребує складних попередніх експериментів по отриманню необхідних даних для настроювання нейронних мереж. 1 UA 111027 C2 5 10 15 20 25 Ставиться задача удосконалення системи автоматичного керування швидкістю руху підводного апарата шляхом додаткового введення елементів обчислення керуючого впливу на електродвигун гребного гвинта, які не потребують спеціальних даних для настроювання, що приводить до значного спрощення попередніх експериментальних процедур по отриманню таких даних, прискорення та спрощення синтезу системи керування в цілому. Поставлена задача вирішується тим, що в системі автоматичного керування швидкістю руху, яка містить задавач вхідного сигналу, датчик швидкості руху ПА, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, а також ПА як об'єкт керування, відповідно до винаходу додатково введено перший блок затримки вихідного сигналу, зв'язаний з датчиком швидкості, другий блок затримки вихідного сигналу, зв'язаний з першим блоком затримки, перший обчислювач, зв'язаний входами з датчиком швидкості, першим і другим блоками затримки вихідного сигналу, другим обчислювачем та задавачем вхідного сигналу, виходами - з силовим перетворювачем і другим обчислювачем та постачений програмою на базі алгоритму оптимізації (пошуку мінімуму середньоквадратичної похибки), другий обчислювач, зв'язаний входами і виходом з першим обчислювачем і постачений програмою на базі штучних нейронних мереж, що відтворює модель динаміки об'єкта. Суть пропозиції полягає в наступному. Система керування постачається моделлю об'єкта, виконаною на базі апарата штучних нейронних мереж (ШНМ-модель), та блоком оптимізації. Задачею останнього є формування послідовності керуючих сигналів певної довжини, яка забезпечить протягом наступних декількох кроків дискретизації рух вихідної координати об'єкта за траєкторією, визначеною задавачем вхідного сигналу. Для цього блок оптимізації формує набір (послідовність) сигналів керування (на початку процедури - випадковим чином), подає їх на ШНМ-модель і отримує прогноз зміни вихідної координати. Потім набір сигналів керування послідовно коректується і знов подається на ШНМ-модель. І в такий спосіб вирішується задача мінімізації критерію якості керування: y y J y r t i y m t i ut i 1 ut i 2 , i1 30 35 40 45 50 55 2 2 i1 де Ny, Nu - розмір горизонту передбачення, тобто довжина послідовності прогнозованих кроків, на яких відстежується похибка керування та приріст керуючого сигналу, відповідно; уr бажані значення вихідної координати, які формуються задавачем вхідного сигналу; уm спрогнозовані ШНМ-моделлю значення; u - значення керуючого сигналу; ρ - коефіцієнт, який відповідає за внесок в критерій якості приросту керуючого сигналу. Другий доданок дає змогу запобігати різких змін керуючого сигналу. Таким чином, блок оптимізації за допомогою ШНМ-моделі визначає оптимальну послідовність керуючих сигналів, яка забезпечить максимальну близькість прогнозованої траєкторії до бажаної (заданої). Настроювання регулятора полягає лише в навчанні ШНМ, алгоритми її роботи описані в літературі (Круглов В.В., Борисов В.В. Искусственные нейронные сети. Теория и практика. - М.: "Горячая линия - Телеком", 2002. - с.10-20, с.89-134 [1]). При цьому для навчання не потрібно проводити складний експеримент по отриманню навчальної вибірки спеціального виду. Для даного типу регулятора в системі керування ПА достатньо протягом деякого часу (до 100-200 с) подавати на вхід об'єкта керуючий сигнал, який являє собою сходинки випадкової величини (з допустимого діапазону) та випадкової довжини (в діапазоні від 1 до 10 секунд). При цьому запам'ятовуються вхідна та вихідна координати з інтервалом часу 0,01 с. По цих даних на базі персонального комп'ютера за спеціальним алгоритмом навчається штучна нейронна мережа, які апроксимує зняті дані. Потім параметри цією мережі прописуються в апаратну ШНМ у складі регулятора, після чого регулятор готовий до роботи. Структурна схема пропонованої системи показана на кресленні. Система автоматичного керування швидкістю руху ПА на базі регулятора з передбаченням містить: послідовно з'єднані силовий перетворювач 1, виходом якого є напруга живлення електродвигуна 2, електродвигун 2, який забезпечує кутову частоту обертання ω рушія 3, рушій 3 по даній осі координат - гребний гвинт, що розвиває упор Т, підводний апарат 4, як об'єкт керування; датчик 5 швидкості руху ПА по даній осі, зв'язаний з корпусом підводного апарата 4; перший блок затримки вихідного сигналу 6, зв'язаний з датчиком швидкості 5; другий блок затримки вихідного сигналу 7, зв'язаний з першим блоком затримки 6; перший обчислювач 8, зв'язаний входами з датчиком швидкості 5, першим 6 і другим 7 блоками затримки вихідного сигналу, другим обчислювачем 9 і задавачем вхідного сигналу 10, а виходами - з силовим перетворювачем 1 і другим обчислювачем 9; другий обчислювач 9, зв'язаний входами і виходом з першим обчислювачем 8; задавач вхідного сигналу 10, вихід якого зв'язаний з першим 2 UA 111027 C2 5 10 15 20 25 обчислювачем 8 і який задає значення швидкості ПА згідно з програмою руху. До складу системи керування входять пристрої 6-9. Обчислювачі 8 і 9 можуть бути реалізовані програмно на базі ЕОМ або загально відомих мікроконтролерів (Motorola, Intel, PIC-контролери). Пропонована система працює наступним чином. З інтервалом часу tc система керування опитує датчик 5 і задавач вхідного сигналу 10. Ці сигнали, а також сигнали з блоків затримки 6 і 7, які виконують затримку сигналу на інтервал часу tc для врахування динаміки об'єкту, надходять до обчислювача 8. В ньому формується (випадковим чином) набір керуючих сигналів. Перший з цих сигналів, разом із значеннями поточної і затриманої на 1 і 2 кроки швидкості руху подаються на обчислювач 9, який розраховує прогнозоване значення швидкості через 1 крок дискретизації. Подається другий сигнал керування з набору, а разом з ним прогнозоване значення швидкості через 1 крок (розраховане раніше), поточне значення і затримане на 1 крок. Отримується прогноз швидкості через 2 кроки і т.д. до отримання прогнозу на весь горизонт, що розглядається. Обчислювач 8 розраховує критерій якості та виконує корекцію набору сигналів керування згідно з алгоритмом оптимізації. Процедура розрахунку прогнозу вихідної траєкторії повторюється для нового набору. Весь процес повторюється до отримання мінімуму критерію якості керування J. Після закінчення процедури оптимізації перший керуючий сигнал з отриманої послідовності подається на об'єкт. На наступному інтервалі дискретизації знов виконуються описані розрахунки, оптимізація керування на наступні декілька кроків і подача першого з послідовності сигналу керування на об'єкт. В результаті об'єкт отримує близький до оптимального керуючий сигнал, і зміна швидкості руху ПА максимально відповідає сигналу, що формується задавачем. Таким чином, вирішується задача побудови системи керування істотно нелінійним об'єктом підводним апаратом в умовах невизначеності його параметрів на основі лише експериментальних даних. При цьому сам експеримент по отриманню даних є дуже простим та таким, що легко реалізується. Також відпадає необхідність в оснащенні системи датчиком частоти обертання гребного гвинта. Отримана система забезпечує високу точність, формуючи близький до оптимального сигнал керування. ФОРМУЛА ВИНАХОДУ 30 35 40 Система автоматичного керування швидкістю руху підводного апарата на базі регулятора з передбаченням, яка містить задавач вхідного сигналу, датчик швидкості, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що до неї додатково введено перший блок затримки вихідного сигналу, зв'язаний з датчиком швидкості, другий блок затримки вихідного сигналу, зв'язаний з першим блоком затримки, перший обчислювач, зв'язаний входами з датчиком швидкості, першим і другим блоками затримки вихідного сигналу, другим обчислювачем та задавачем вхідного сигналу, виходами - з силовим перетворювачем і другим обчислювачем та оснащений програмою на базі алгоритму оптимізації - пошуку мінімуму середньоквадратичної похибки, другий обчислювач, зв'язаний входами і виходом з першим обчислювачем і оснащений програмою на базі штучних нейронних мереж, що відтворює модель динаміки об'єкта. Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G06F 15/18, B63H 21/21, G06N 3/02, B63G 8/08, G06N 3/08, G05B 13/04, B63H 25/42
Мітки: апарата, регулятора, підводного, базі, швидкістю, передбаченням, руху, система, керування, автоматичного
Код посилання
<a href="https://ua.patents.su/5-111027-sistema-avtomatichnogo-keruvannya-shvidkistyu-rukhu-pidvodnogo-aparata-na-bazi-regulyatora-z-peredbachennyam.html" target="_blank" rel="follow" title="База патентів України">Система автоматичного керування швидкістю руху підводного апарата на базі регулятора з передбаченням</a>
Комбінована система автоматичного керування швидкістю руху підводного апарата на базі регулятора з передбаченням та narma-l2-совітником
Номер патенту: 110082
Опубліковано: 10.11.2015
Автор: Блінцов Сергій Володимирович
МПК: G06N 3/02, G06F 15/18, B63H 21/21, B63G 8/08, G06N 3/08, B63H 25/42, G05B 13/04
Мітки: керування, базі, передбаченням, система, руху, narma-l2-совітником, автоматичного, регулятора, апарата, підводного, комбінована, швидкістю
Формула / Реферат:
Комбінована система автоматичного керування швидкістю руху підводного апарата на базі регулятора з передбаченням та NARMA-L2-совітником, яка містить задавач вхідного сигналу, датчик швидкості, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що до неї додатково введено перший блок затримки вихідного сигналу, зв'язаний з датчиком швидкості, другий блок...
Система автоматичного керування швидкістю руху підводного апарата на базі narma-l2 ругулятора
Номер патенту: 110178
Опубліковано: 25.11.2015
Автор: Блінцов Сергій Володимирович
МПК: G06N 3/08, G06F 15/18, B63H 21/21, G06N 3/02, G05B 13/04, B63H 25/42, B63G 8/08
Мітки: ругулятора, руху, керування, швидкістю, базі, система, апарата, підводного, narma-l2, автоматичного
Формула / Реферат:
Система автоматичного керування швидкістю руху підводного апарата на базі NARMA-L2 регулятора, яка містить задавач вхідного сигналу, датчик швидкості, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що додатково введено перший блок затримки вихідного сигналу, зв'язаний з датчиком швидкості, другий блок затримки вихідного сигналу, зв'язаний з першим...
Система автоматичного керування швидкістю руху підводного апарата на базі інверсної моделі з онлайн-ідентифікацією параметрів
Номер патенту: 107976
Опубліковано: 10.03.2015
Автор: Блінцов Сергій Володимирович
МПК: B63G 8/00, B63H 25/00
Мітки: автоматичного, підводного, параметрів, моделі, онлайн-ідентифікацією, система, апарата, руху, швидкістю, базі, інверсної, керування
Формула / Реферат:
Система автоматичного керування швидкістю руху підводного апарата на базі інверсної моделі з онлайн-ідентифікацією параметрів, що містить задавач вхідного сигналу, датчик швидкості руху підводного апарата і датчик частоти обертів гребного гвинта, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт та підводний апарат (ПА) як об'єкт керування, яка відрізняється тим, що в неї додатково введені обчислювач прискорення ПА,...
Система автоматичного керування швидкістю руху підводного апарата на базі штучних нейронних мереж з еталонною моделлю
Номер патенту: 110179
Опубліковано: 25.11.2015
Автор: Блінцов Сергій Володимирович
МПК: G06N 3/02, G06F 15/18, G05B 13/00, B63H 21/21, G05D 1/02
Мітки: базі, швидкістю, автоматичного, моделлю, еталонною, апарата, система, мереж, нейронних, штучних, керування, підводного, руху
Формула / Реферат:
Система автоматичного керування швидкістю руху підводного апарата на базі штучних нейронних мереж з еталонною моделлю, яка містить задавач вхідного сигналу, датчик швидкості, послідовно з'єднані силовий перетворювач, електродвигун з гребним гвинтом, а також підводний апарат як об'єкт керування, яка відрізняється тим, що до неї додатково введено перший блок затримки вихідного сигналу, зв'язаний з датчиком швидкості, другий блок затримки...
Система автоматичного керування швидкістю руху підводного апарата по одній осі координат
Номер патенту: 101201
Опубліковано: 11.03.2013
Автор: Блінцов Сергій Володимирович
МПК: B63G 8/00, B63H 21/21, B63H 25/00
Мітки: керування, апарата, автоматичного, координат, підводного, руху, швидкістю, осі, одний, система
Формула / Реферат:
Система автоматичного керування швидкістю руху підводного апарата по одній осі координат, яка містить задавач вхідного сигналу, датчики швидкості та частоти обертання гребного гвинта, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що до неї додатково введено апроксиматор залежності приросту швидкості і прискорення руху підводного апарата від його...
Попередній патент: Спосіб виготовлення біметалевого подового електрода
Наступний патент: Комбінація лікарських засобів і спосіб надання допомоги при отруєнні фосфіном
Випадковий патент: Спосіб виготовлення робочих органів сільськогосподарських машин