Кувальний маніпулятор
Номер патенту: 70233
Опубліковано: 11.06.2012
Автори: Колоколов Олексій Юрійович, Богун Віктор Петрович, Стоколясов Олексій Миколайоваич

Формула / Реферат
1. Кувальний маніпулятор, що містить основу, механізм переміщення кувального маніпулятора, що встановлений на основі, передні ходові візки та задні ходові візки, на які встановлена основа, хобот, захоплювач, який розташований на хоботі, передній важіль, задній важіль, передній вал, задній вал, передні тяглі, задні тяглі, гідроциліндри відкочування, гідроциліндри підйому, гідроциліндри нахилу, передній гідроциліндр поперечного зсуву, задній гідроциліндр поперечного зсуву, який відрізняється тим, що додатково містить підвіску, в якій розташовується хобот, додатково містить передню напрямну, задню напрямну і балансир, передній важіль з'єднаний із основою, задній важіль з'єднаний із основою, передній вал з'єднаний із переднім важелем і розташований горизонтально, задній вал з'єднаний із заднім важелем і розташований горизонтально, передня напрямна розташована на передньому валу із можливістю рухатись, задня напрямна розташована на задньому валу із можливістю рухатись, кожний із передніх тяглів з'єднаний із передньою напрямною та шарнірно з'єднаний із підвіскою, кожний із задніх тяглів шарнірно з'єднаний із переднім важелем та заднім важелем, балансир шарнірно з'єднаний із основою, кожний із гідроциліндрів відкочування шарнірно з'єднаний із балансиром та підвіскою, кожний із гідроциліндрів підйому шарнірно з'єднаний із основою та переднім важелем, кожний із гідроциліндрів нахилу з'єднаний із задньою напрямною та шарнірно з'єднаний із кінцем підвіски, корпус переднього гідроциліндра поперечного зсуву з'єднаний із передньою напрямною і штоки переднього гідроциліндра поперечного зсуву з'єднані із переднім важелем, корпус заднього гідроциліндра поперечного зсуву з'єднаний із задньою напрямною і штоки заднього гідроциліндра поперечного зсуву з'єднані із заднім важелем.
2. Кувальний маніпулятор за пунктом 1, який відрізняється тим, що механізм переміщення кувального маніпулятора містить цівкові колеса.
3. Кувальний маніпулятор за будь-яким із пунктів 2-3, який відрізняється тим, що додатково містить кронштейн та демпфери бічних коливань, причому кронштейн розташований на нижній частині передньої напрямної, демпфери бічних коливань просторово розташовані на підвісці з обох боків кронштейна.
Текст
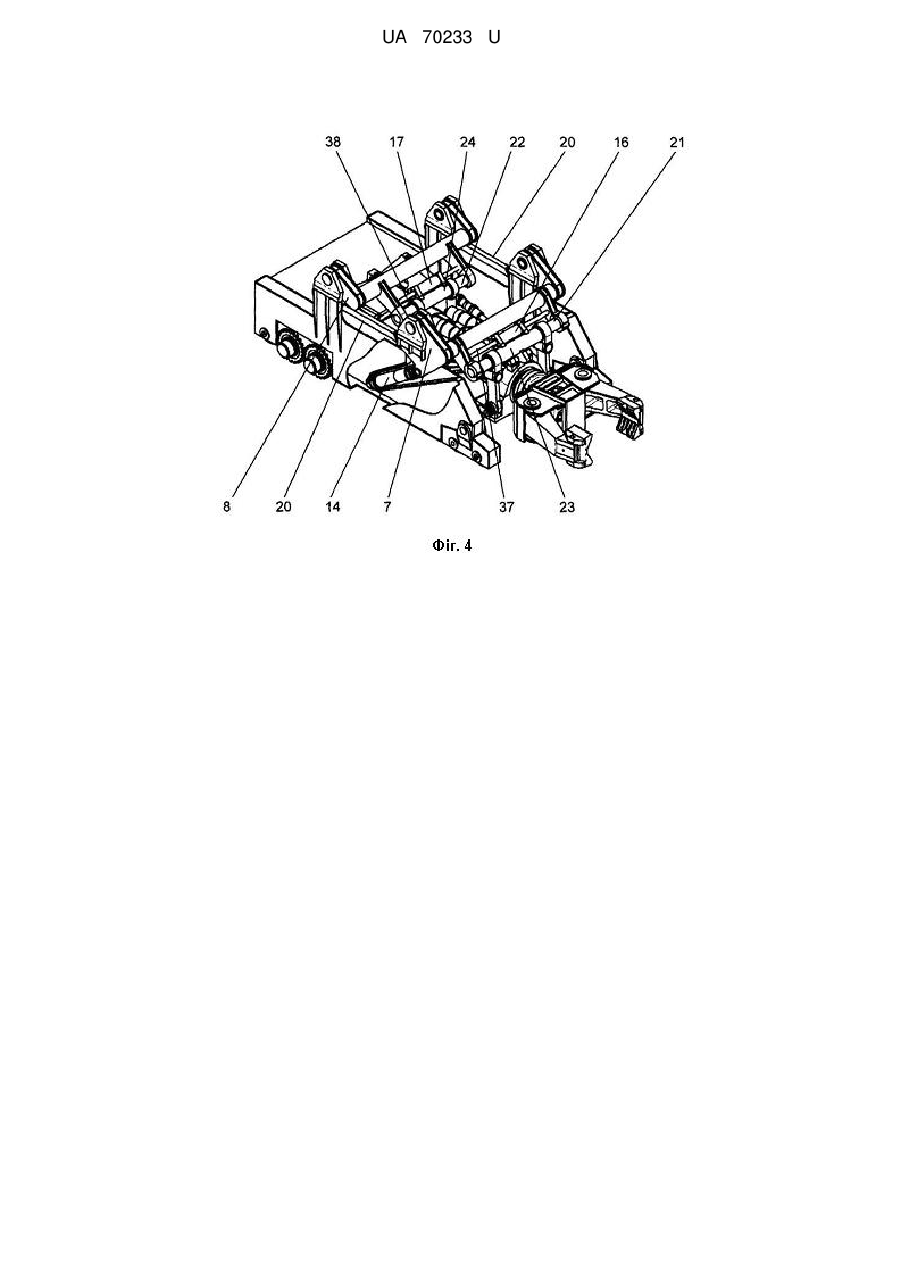
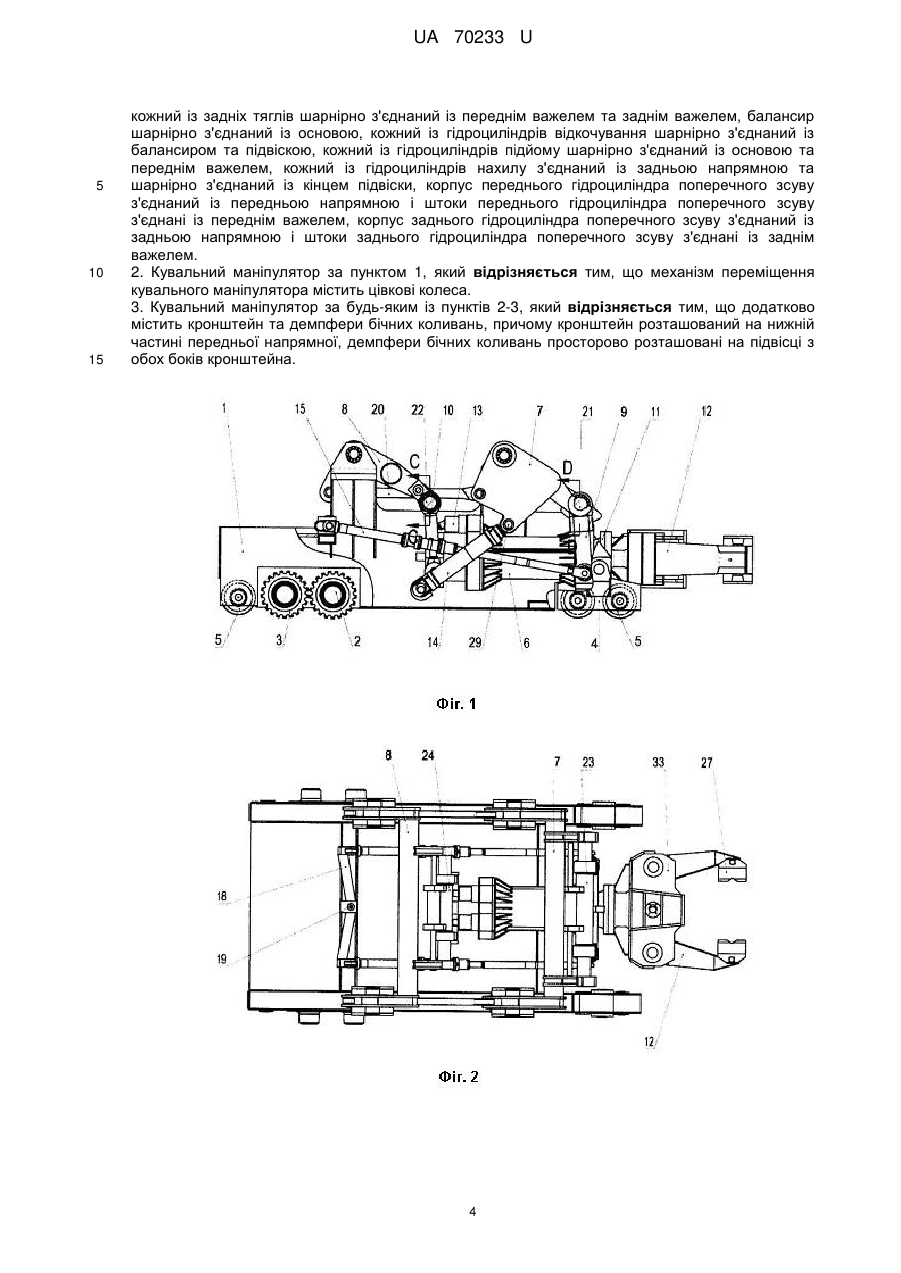
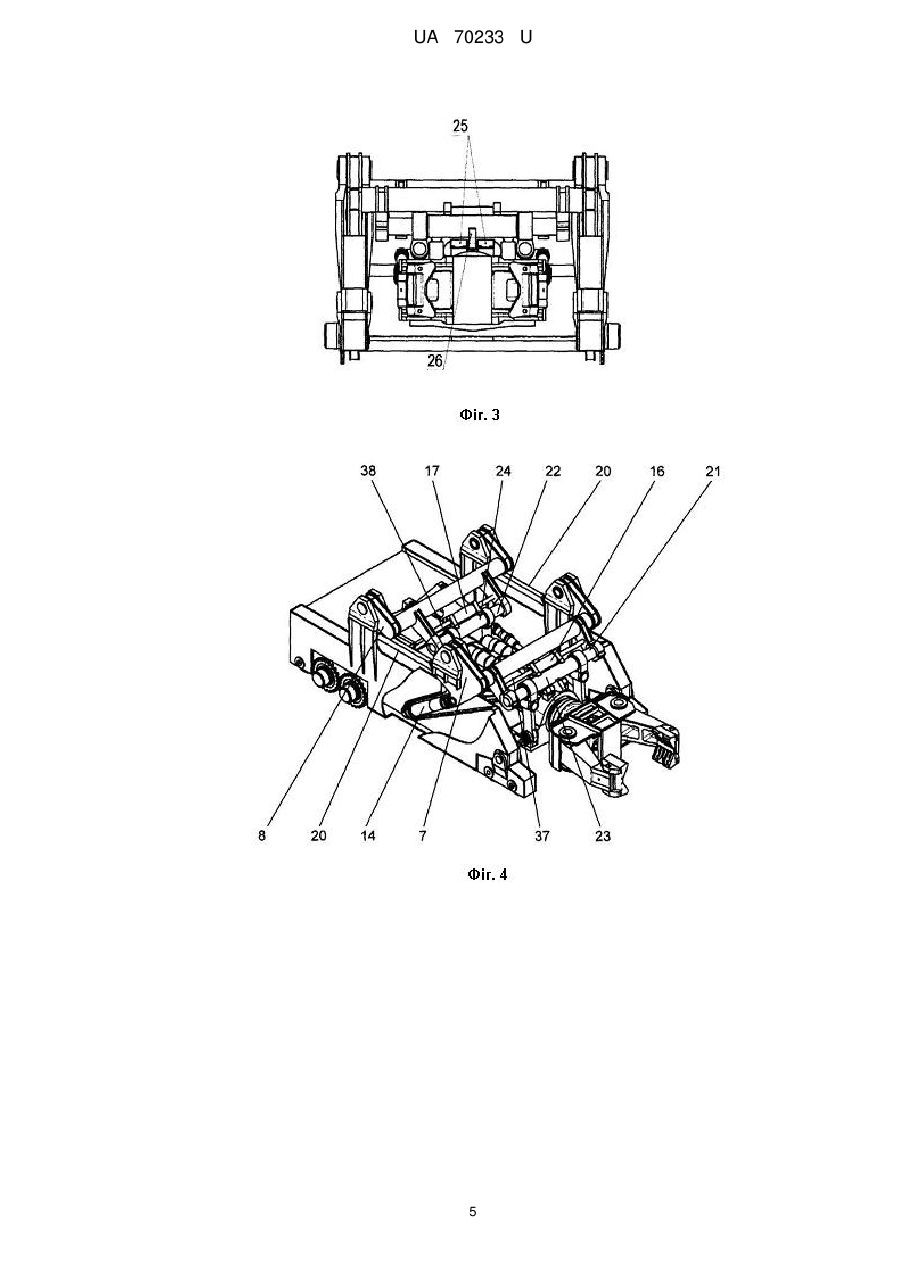
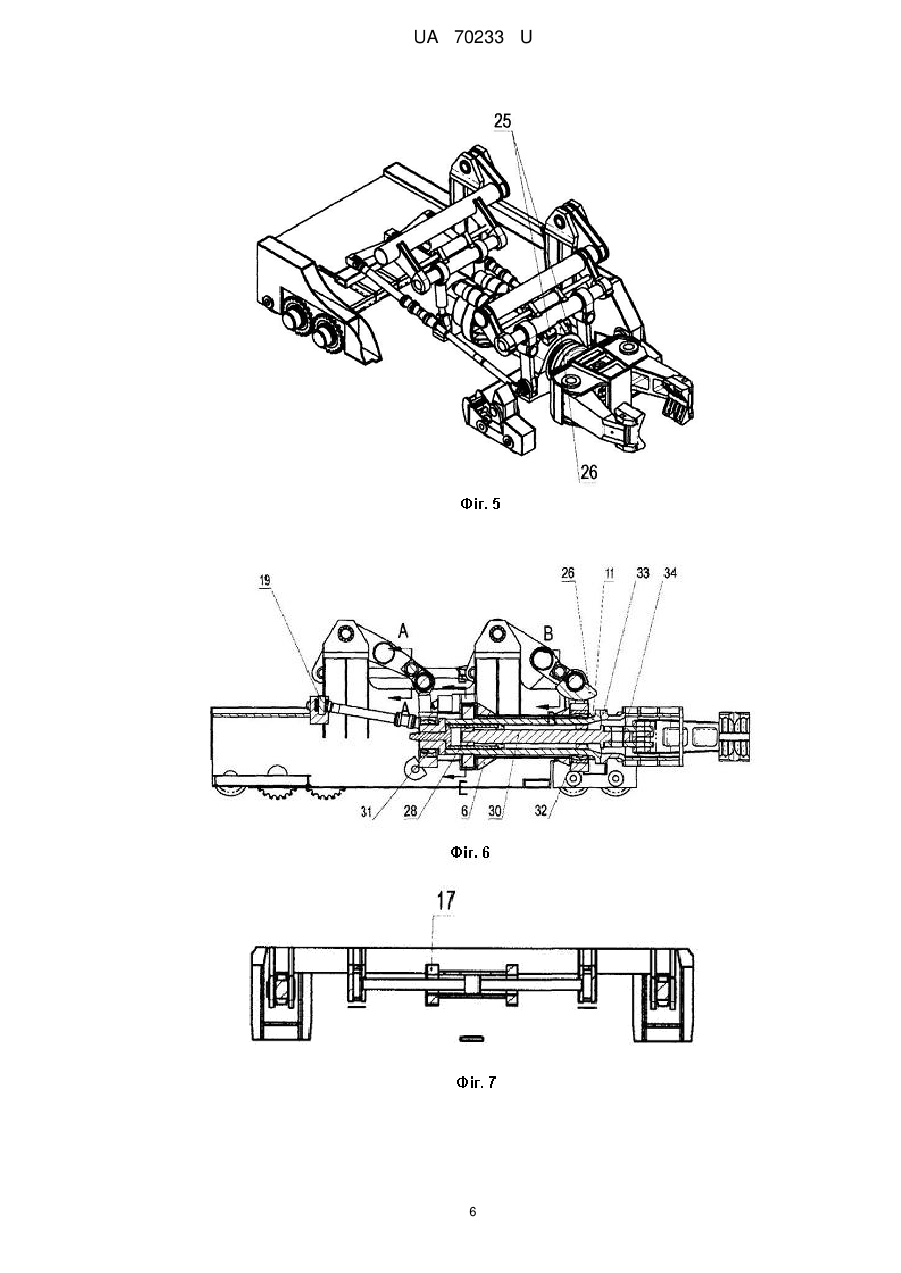
Реферат: Кувальний маніпулятор містить основу, механізм переміщення кувального маніпулятора, передні ходові візки та задні ходові візки, хобот, захоплювач, передній важіль, задній важіль, передній вал, задній вал, передні тяглі, задні тяглі, гідроциліндри відкочування, гідроциліндри підйому, гідроциліндри нахилу, передній гідроциліндр поперечного зсуву, задній гідроциліндр поперечного зсуву. Додатково він містить підвіску, передню напрямну, задню напрямну та балансир. UA 70233 U (33) Код держави-учасниці UA UA 70233 U UA 70233 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до допоміжного обладнання кувально-пресових цехів, а саме до таких пристроїв як кувальні маніпулятори. Із рівня техніки відомий кувальний маніпулятор (опис до патента на корисну модель UA 15127 U, опубл. 15.06.2006), який містить основу, механізм переміщення кувального маніпулятора, що встановлений на основі, передні ходові візки та задні ходові візки, на які встановлена основа, хобот, захоплювач, який розташований на хоботі, раму хобота, передню додаткову раму та задню додаткову раму, що встановлені усередині рами хобота із можливістю поперечного руху відносно рами хобота, передній вал, з'єднаний із основою, задній вал, з'єднаний із основою, передні важелі, розташовані на передньому валу, задні важелі розташовані на задньому валу, передні тяглі, кожний із яких шарнірно з'єднаний із переднім важелем та рамою хобота, задні тяглі, кожний із яких з'єднаний із переднім важелем та рамою хобота, гідроциліндри відкочування, кожний із яких шарнірно з'єднаний із основою та рамою хобота, гідроциліндри підйому, кожний з яких жорстко з'єднаний із переднім ходовим візком та шарнірно з'єднаний із переднім важелем, гідроциліндри відкочування, кожний з яких шарнірно з'єднаний із основою та рамою хобота, гідроциліндри нахилу, кожний із яких шарнірно з'єднаний із переднім важелем та заднім важелем, передній гідроциліндр поперечного зсуву та задній гідроциліндр поперечного зсуву, кожний із яких шарнірно з'єднаний із основою та додатковою рамою. Недоліком відомого кувального маніпулятора є: - наявність передньої додаткової рами та задньої додаткової рами, які рухаються відносно рами хобота, зменшує жорсткість конструкції пристрою та призводить до виникнення небажаних додаткових поперечних коливань у кувальному маніпуляторі при руці хобота у будь-якому напрямі, збільшує вагу рухливих елементів пристрою та відповідно збільшує витрати енергії на підйом рухливих елементів при підйомі хобота; - використане компонування гідроциліндрів нахилу у пристрої вимагає значних витрат енергії для нахилу хобота та дає низьку точність позиціювання положення хобота при його нахилі; - використане компонування гідроциліндрів поперечного зсуву у пристрої дає низьку точність позиціювання положення хобота при його повороті у горизонтальній площині та при поперечному переміщенню хобота. Задачею корисної моделі є удосконалення кувального маніпулятора шляхом зміни компонування елементів пристрою та введення нових елементів. Задача вирішується тим, що кувальний маніпулятор, що містить основу, механізм переміщення кувального маніпулятора, що встановлений на основі, передні ходові візки та задні ходові візки, на які встановлена основа, хобот, захоплювач, який розташований на хоботі, згідно з корисною моделлю, додатково містить підвіску, в якій розташовується хобот, передній важіль, з'єднаний із основою, задній важіль, з'єднаний із основою, передній вал, з'єднаний із переднім важелем і розташований горизонтально, задній вал, з'єднаний із заднім важелем і розташований горизонтально, передню напрямну, розташовану на передньому валу із можливістю рухатись, задню напрямну, розташовану на задньому валу із можливістю рухатись, передні тяглі, кожний із яких з'єднаний із передньою напрямною та шарнірно з'єднаний із підвіскою, задні тяглі, кожний із яких шарнірно з'єднаний із переднім важелем та заднім важелем, балансир, який шарнірно з'єднаний із основою, гідроциліндри відкочування, кожний із яких шарнірно з'єднаний із балансиром та підвіскою, гідроциліндри підйому, кожний з яких шарнірно з'єднаний із основою та переднім важелем, гідроциліндри нахилу, кожний із яких з'єднаний із задньою напрямною та шарнірно з'єднаний із кінцем підвіски, передній гідроциліндр поперечного зсуву, корпус якого з'єднаний із передньою напрямною і штоки якого з'єднані із переднім важелем, задній гідроциліндр поперечного зсуву, корпус якого з'єднаний із задньою напрямною і штоки якого з'єднані із заднім важелем. Крім того, механізм переміщення кувального маніпулятора може містити цівкові колеса. Крім того, кувальний маніпулятор може додатково містити кронштейн, який розташований на нижній частині передньої напрямної, та демпфери бічних коливань, які просторово розташовані на підвісці з обох боків кронштейна. Технічний результат, який досягається корисною моделлю: - наявність підвіски зменшує вагу рухливих елементів, і відповідно зменшує витрати енергії на підйом хобота; - запропоноване компонування гідроциліндрів нахилу, коли гідроциліндри нахилу безпосередньо здійснюють переміщення підвіски, призводить до зменшення витрат енергії при нахилянні хобота та підвищує точність позиціювання хобота; 1 UA 70233 U 5 10 15 20 25 30 35 40 45 50 55 - запропоноване компонування переднього гідроциліндра поперечного зсуву та заднього гідроциліндра поперечного зсуву дозволяє підвищити точність позиціювання хобота при поперечному переміщенні хобота та зменшує амплітуду небажаних поперечних коливань хобота; - наявність кронштейна, розташованого на нижній частині передньої напрямної, та демпферів бічних коливань, які просторово розташовані на підвісці з обох боків кронштейна, дозволяє зменшити амплітуду небажаних поперечних коливань хобота та швидко припинити поперечні коливання хобота. Фіг. 1 - вигляд кувального маніпулятора з лівого боку (без лівої стінки основи) Фіг. 2 - вигляд кувального маніпулятора зверху Фіг. 3 - вигляд кувального маніпулятора спереду Фіг. 4 - загальний вигляд кувального маніпулятора (відсутня частина лівої стінки основи) Фіг. 5 - загальний вигляд кувального маніпулятора (без лівої стінки основи) Фіг. 6 - вигляд кувального маніпулятора у поперечному перерізі Фіг. 7 - вигляд кувального маніпулятора у розрізі за лінією А-А на фіг.6 Фіг. 8 - вигляд кувального маніпулятора у розрізі за лінією В-В на фіг.6 Фіг. 9 - вигляд кувального маніпулятора у розрізі за лінією С-С на фіг.6 Фіг. 10 - вигляд кувального маніпулятора у розрізі за лінією D-D на фіг. 1 Фіг. 11 - вигляд кувального маніпулятора у розрізі за лінією Е-Е на фіг.6 Фіг. 12 - вигляд кувального маніпулятора при поперечному переміщенні хобота Фіг. 13 - вигляд кувального маніпулятора при повороті хобота у горизонтальні площині Фіг. 14 - вигляд кувального маніпулятора при нахилянні хобота Фіг. 15 - вигляд кувального маніпулятора при відкочуванні хобота Фіг. 16 - вигляд кувального маніпулятора при підйомі хобота Кувальний маніпулятор містить основу 1 (Фіг. 1), на якій розташований механізм переміщення із цівковими колесами 3 та 4. Основа встановлена на ходові візки 4 з колесами 5, які опираються на рейкові колії (не показано). У нижній частині пристрою знаходиться підвіска 6, в які розташовані хобот 11 із захоплювачем 33 ( що містить рухомі кліщі 12), механізм обертання хобота 13, за допомогою якого здійснюють обертання хобота навколо своєї поздовжньої осі, та механізм приводу у рух кліщів 12. Механізм приводу у рух клещей виконаний у вигляді гідроциліндра захоплювача 28, штока 30, серги 34, вальниць 31 та 32, які встановлені у підвісці 6 (Фіг. 6). Механізм обертання хобота складається із зубчастого колеса 36 (Фіг. 11), яке надягнуте на корпус хобота, та двох шестерінок 35, які розташованих на валах двох електродвигунів (не показані) та при обертанні рухають зубчасте колесо 36. Передній важіль 7 та задній важіль 8 з'єднані шарнірно із основою 1. Із переднім важелем 7 з'єднаний передній вал 21, який розташований горизонтально. Із заднім важелем 8 з'єднаний задній вал 22, який розташований горизонтально. Передня напрямна 23 розташована на передньому валу 21 із можливістю рухатись по передньому валу. Задня напрямна 24 розташована на задньому валу 22 із можливістю рухатись по задньому валу. Із передньою напрямною 23 шарнірно з'єднані два передніх тяглі 9, які також шарнірно з'єднані із підвіскою 6. Пристрій містить два задніх тяглі 20, які шарнірно з'єднаний із переднім важелем 7 та заднім важелем 8. У задній частині кувального маніпулятора розташований балансир 18, який шарнірно з'єднаний із основою 1 за допомогою осі 19. Пристрій містить два гідроциліндрів відкочування 15, кожний із яких шарнірно з'єднаний із балансиром 18 (по одному гідроциліндру відкочування на кожне плече балансиру) та підвіскою 6. Пристрій містить два гідроциліндри підйому 14, кожний із яких шарнірно з'єднаний із основою 1 та переднім важелем 7. Пристрій містить два гідроциліндри нахилу 10, кожний із яких з'єднаний із задньою напрямною 24 та шарнірно з'єднаний із кінцем підвіски 6. На передньому важелі 7 розташований передній гідроциліндрпоперечного зсуву 16, корпус якого з'єднаний із передньою напрямною 23 і штоки 37 якого з'єднані із переднім важелем 7. На задньому важелі 8 розташований задній гідроциліндр поперечного зсуву 17, корпус якого з'єднаний із задньою напрямною 24 і штоки 38 якого з'єднані із заднім важелем 8. На нижній частині передньої напрямної 23 розташований кронштейн 26, на підвісці розташовані демпфери бічних коливань 25, які просторово розташовані на підвісці з обох боків кронштейна. 2 UA 70233 U 5 10 15 20 25 30 35 40 45 Відмінною характеристикою корисної моделі є те, що механізм переміщення 2 (Фіг. 1) обладнується парними цівковими колесами 3 з кожного боку рейки (не зображена), які можуть обертатися та створювати певний крутильний момент в обопільно протилежному напрямку. Крім того, відмінною характеристикою корисної моделі є те, що передній гідроциліндр бічного зсуву 16 та задній гідроциліндр бічного зсуву 17 (Фіг. 2, 4), встановлюються зверху, а саме - на передньому важелі 7 і задньому важелі 8. Крім того, відмінною характеристикою корисної моделі є те, що гідроциліндри підйому 14 шарнірно з'єднуються з одного боку з основою 1, а з іншого - з передніми важелями 7 за допомогою шарнірних з'єднань 29. Приклади використання кувального маніпулятора показані на Фіг. 12-16, пунктирною лінією показані елементи кувального маніпулятора після переміщення в інше положення. Кувальний маніпулятор функціонує наступним чином. В вихідному стані кувальний маніпулятор знаходиться на певній відстані від преса. Ця відстань визначається довжиною заготованки, яку загружають. Переміщення маніпулятора здійснюється вздовж рейок за допомогою зачеплення цівкових коліс 3 за ланцюг, прикріплений до фундамента (не зображений). Кувальний маніпулятор може функціювати в двох режимах: ручному з використанням багатокоординатного руків'я керування та автоматичному, наприклад через систему числового програмного управління. Заготовка подається звідом (не зображений) та захоплюється губками кліщів 27. Для вертикального переміщення заготовки використовують гідроциліндри підйому 14 (Фіг. 16), які надають руху переднім важелям 7 та змушують їх обертатися відносно основи 1, у свою чергу, надаючи руху через задні тяглі 20 заднім важелям 8, які теж обертаються відносно основи 1. При обертанні переднього важеля та заднього важеля підіймаються або опускаються передній вал 21 із передньою напрямною 23 та задній вал 22 із задньою напрямною 24, які, у свою чергу, через передні тяглі 9 та гідроциліндри нахилу 10 передають рух підйому або опускання на підвіску 6. При поперечному переміщенні хобота або при повороті хобота у горизонтальній площині використовують передній гідроциліндр бічного зсуву 16 та задній гідроциліндр бічного зсуву 17 (Фіг. 12,13). При одночасному переміщенні корпусу переднього гідроциліндра бічного зсуву 16 та корпусу заднього гідроциліндра бічного зсуву 17 буде здійснюватись рух передньої напрямної 23 уздовж переднього вала 21 та рух задньої напрямної 24 уздовж заднього вала 22, які, у свою чергу, через передні тяглі 9 та гідроциліндри нахилу 10 передають рух у горизонтальній площині на підвіску 6. У випадку переміщення корпусу переднього гідроциліндра бічного зсуву 16 та корпусу заднього гідроциліндра бічного зсуву 17 одночасно в одному напрямку буде відбуватись поперечне переміщення хобота, у випадку переміщенні корпусу переднього гідроциліндра бічного зсуву 16 та корпусу заднього гідроциліндра бічного зсуву 17 у протилежних напрямках буде відбуватись поворот хобота. При нахилянні хобота використовують гідроциліндри нахилу 10, які підіймають або опускають кінець підвіски 6 (Фіг. 14), таким чином опускаючи або підіймаючи інший кінець хобота із захоплювачем 33. При відкочуванні хобота використовують гідроциліндри відкочування 15 (Фіг. 15), які переміщують кінець передніх тяглів 9, які, у свою чергу, передають рух підвісці 6. При цьому циліндри відкочування 15 розташовані таким чином, щоб рух гідроциліндрів відкочування відбувався у площині, наближеній до горизонтальній площині. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 60 1. Кувальний маніпулятор, що містить основу, механізм переміщення кувального маніпулятора, що встановлений на основі, передні ходові візки та задні ходові візки, на які встановлена основа, хобот, захоплювач, який розташований на хоботі, передній важіль, задній важіль, передній вал, задній вал, передні тяглі, задні тяглі, гідроциліндри відкочування, гідроциліндри підйому, гідроциліндри нахилу, передній гідроциліндр поперечного зсуву, задній гідроциліндр поперечного зсуву, який відрізняється тим, що додатково містить підвіску, в якій розташовується хобот, додатково містить передню напрямну, задню напрямну і балансир, передній важіль з'єднаний із основою, задній важіль з'єднаний із основою, передній вал з'єднаний із переднім важелем і розташований горизонтально, задній вал з'єднаний із заднім важелем і розташований горизонтально, передня напрямна розташована на передньому валу із можливістю рухатись, задня напрямна розташована на задньому валу із можливістю рухатись, кожний із передніх тяглів з'єднаний із передньою напрямною та шарнірно з'єднаний із підвіскою, 3 UA 70233 U 5 10 15 кожний із задніх тяглів шарнірно з'єднаний із переднім важелем та заднім важелем, балансир шарнірно з'єднаний із основою, кожний із гідроциліндрів відкочування шарнірно з'єднаний із балансиром та підвіскою, кожний із гідроциліндрів підйому шарнірно з'єднаний із основою та переднім важелем, кожний із гідроциліндрів нахилу з'єднаний із задньою напрямною та шарнірно з'єднаний із кінцем підвіски, корпус переднього гідроциліндра поперечного зсуву з'єднаний із передньою напрямною і штоки переднього гідроциліндра поперечного зсуву з'єднані із переднім важелем, корпус заднього гідроциліндра поперечного зсуву з'єднаний із задньою напрямною і штоки заднього гідроциліндра поперечного зсуву з'єднані із заднім важелем. 2. Кувальний маніпулятор за пунктом 1, який відрізняється тим, що механізм переміщення кувального маніпулятора містить цівкові колеса. 3. Кувальний маніпулятор за будь-яким із пунктів 2-3, який відрізняється тим, що додатково містить кронштейн та демпфери бічних коливань, причому кронштейн розташований на нижній частині передньої напрямної, демпфери бічних коливань просторово розташовані на підвісці з обох боків кронштейна. 4 UA 70233 U 5 UA 70233 U 6 UA 70233 U 7 UA 70233 U 8 UA 70233 U 9 UA 70233 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Назва патенту англійськоюForging manipulator
Автори англійськоюBohun Viktor Petrovych, Kolokolov Oleksii Yuriiovych, Stokoliasov Oleksii Mykolaiovaych
Назва патенту російськоюКовочный манипулятор
Автори російськоюБогун Виктор Петрович, Колоколов Алексей Юрьевич, Стоколясов Алексей Николаеваич
МПК / Мітки
МПК: B21J 13/10
Мітки: маніпулятор, кувальний
Код посилання
<a href="https://ua.patents.su/12-70233-kuvalnijj-manipulyator.html" target="_blank" rel="follow" title="База патентів України">Кувальний маніпулятор</a>
Маніпулятор до преса
Номер патенту: 15127
Опубліковано: 15.06.2006
Автори: Волошин Олексій Іванович, Тарадай Вадим Валентинович, Василенко Микола Іванович, Назаренко Юрій Михайлович, Голик Василь Якович, Колозін Володимир Іванович
МПК: B21J 13/00
Мітки: маніпулятор, преса
Формула / Реферат:
1. Маніпулятор до преса, який містить основу, виконану у вигляді з'єднаних поперечними балками бортовин, встановлених на ходових візках, а також хобот з захватом і силові ланки, пов'язані з рамою цього хобота, який відрізняється тим, що він оснащений додатковою рамою, встановленою всередині рами хобота з можливістю поперечного переміщення по напрямних.2. Маніпулятор до преса за п. 1, який відрізняється тим, що він оснащений...
Маніпулятор

Номер патенту: 50260
Опубліковано: 15.10.2002
Автори: Москаленко Олександр Володимирович, Вігдергауз Леонід Павлович
МПК: E21B 1/00
Мітки: маніпулятор
Формула / Реферат:
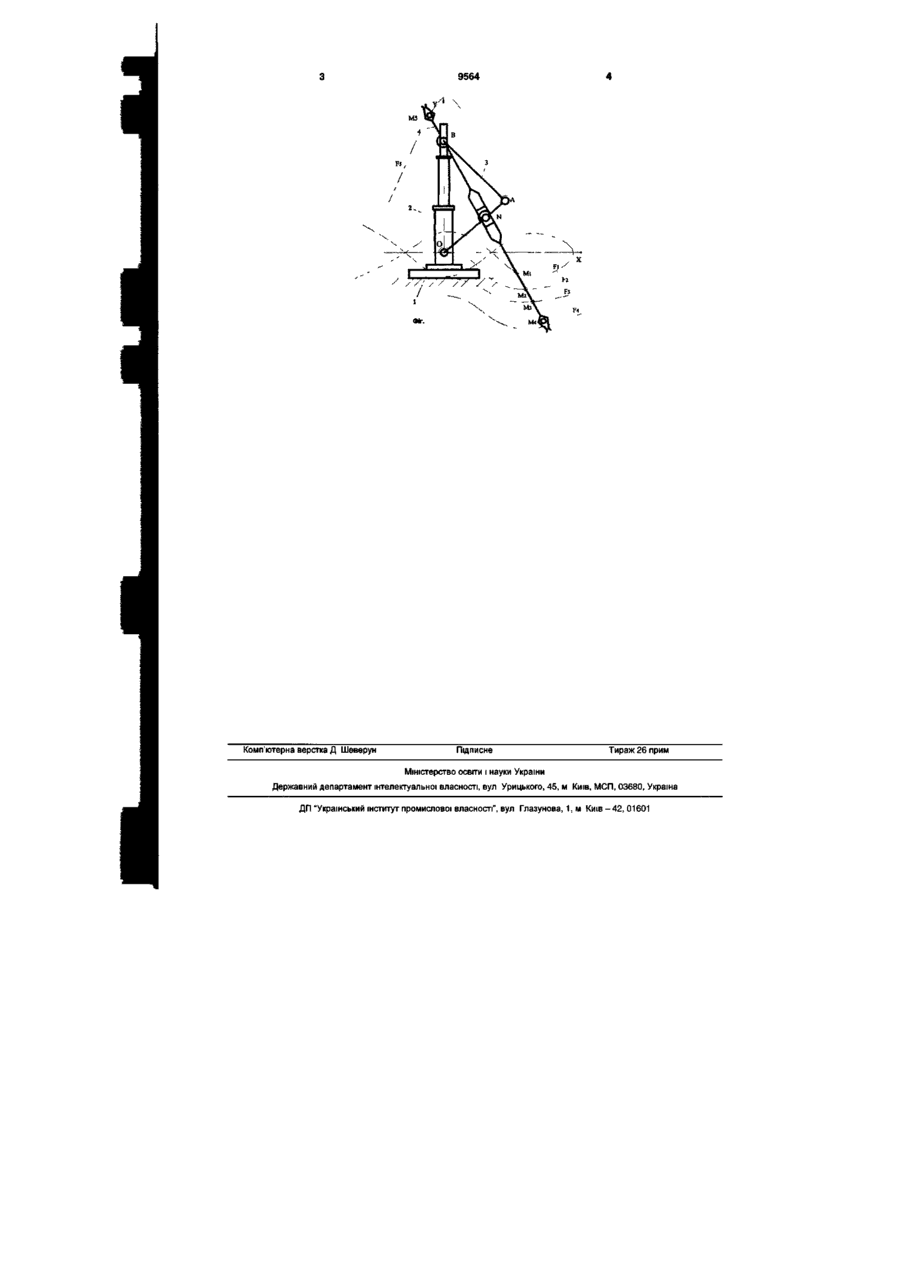
Маніпулятор, що складається із стріли, шарнірно приєднаної до нерухомої напрямної телескопічного подавача бурильної машини, спареного гідроциліндра переміщення подавача нагору і вниз, гідроциліндра переміщення стріли маніпулятора у вертикальній площині, гідроциліндра повороту стріли маніпулятора за допомогою рейкової зубчатої передачі і кронштейна, до якого приєднана стріла, і гідроциліндра переміщення стріли у вертикальній площині, який...
Маніпулятор
Номер патенту: 9564
Опубліковано: 17.10.2005
Автори: Бергер Еміль Григорович, Бергер Євгеній Емильович, Іванов Геннадій Олександрович, Табацков Вячеслав Петрович
МПК: B25J 11/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, який має основу з силовим циліндром та захоплювач руки робота, який відрізняється тим, що він обладнаний кривошипно-шатунним механізмом, ланки якого шарнірно закріплені до штока корпусу силового циліндра кулісою, яка оснащена розмічальними штифтами.
Ковальський маніпулятор
Номер патенту: 5654
Опубліковано: 15.03.2005
Автори: Корчак Олена Сергіївна, Роганов Лев Леонідович
МПК: B21J 13/00
Мітки: ковальський, маніпулятор
Формула / Реферат:
Ковальський маніпулятор, що містить маніпулюючий хобот, шасі у вигляді зварної рами, механізм пересування у вигляді двох колісних пар, які переміщуються уздовж рейкового шляху і рух яким задається від приводу, який відрізняється тим, що оснащений додатковою колісною парою, що зв’язана з задньою колісною парою механізму пересування маніпулятора через регульований важіль, а з передньою - через важіль жорсткості, причому важелі оснащено...
Інструментальний маніпулятор
Номер патенту: 43879
Опубліковано: 10.09.2009
Автори: Залевський Костянтин Едуардович, Дзержинський Віталій Олександрович, Маринов Дмитро Всеволодович, Волошин Олексій Іванович, Удовенко Сергій Олександрович
МПК: B21J 13/00
Мітки: маніпулятор, інструментальний
Формула / Реферат:
Інструментальний маніпулятор, що містить станину, стіл, розміщений на спрямівниках станини з можливістю переміщення відносно них, поворотну обойму, опорні ролики, інструментальні штанги з інструментом, зв'язані з повзунами, встановленими на спрямівниках поворотної обойми, гідроциліндр механізму підйому інструменту і механізм обертання поворотної обойми, який відрізняється тим, що поворотна обойма виконана з упорами, розміщеними по колу на...
Попередній патент: Спосіб індивідуального відливання поршневих кілець у кокіль
Наступний патент: Спосіб оздоровлення і реабілітації серцево-судинної і легенево-дихальної систем людини у воді
Випадковий патент: Похідні пурину з властивостями агоніста людського а2а рецептора, спосіб їх одержання, фармацевтична композиція та спосіб лікування