Спосіб контролю якості збираної сільськогосподарської продукції
Формула / Реферат
1. Спосіб оцінки вмісту небажаних частинок у зерновому матеріалі, який включає наступні етапи:
a) знімання на відеокамеру зображення оброблюваного зернового матеріалу (S3);
b) розпізнавання відображень як мінімум одного типу небажаних частинок на відзнятому зображенні (S5-S8; S11-S14);
c) вимірювання площі (S8; S14), покритої відображенням кожної зареєстрованої частинки на зображенні;
d) визначення вмісту небажаних частинок пропорційно до площі зареєстрованих відображень (S9; S15), який відрізняється тим, що
етап розпізнавання b) здійснюють на основі щонайменше одного настроюваного параметра, з наступним етапом;
f) погодження вибраного оператором значення параметра (S20).
2. Спосіб за п. 1, який відрізняється тим, що у операції d) зареєстровану площу помножують на поправочний коефіцієнт (S10; S16), щоб одержати частку чужорідних домішок, виражену як співвідношення маси чужорідних домішок до маси збираної сільськогосподарської продукції.
3. Спосіб за п. 1 або 2, який відрізняється тим, що включає подальші етапи:
e) розпізнавання зареєстрованих у операції с) відображень небажаних частинок у зображенні та відтворення на екрані дисплея (S17) одержаного таким способом зображення.
4. Спосіб за будь-яким з попередніх пунктів, який відрізняється тим, що після здійснення кожного етапу f) (S20) етапи с) (S8; S14) та e) (S17) повторюють на одному і тому ж відзнятому зображенні.
5. Спосіб за будь-яким з попередніх пунктів, який відрізняється тим, що включає подальший етап:
g) створення попереджувального сигналу (S19), якщо зафіксований вміст небажаних частинок перевищує граничне значення.
6. Спосіб за будь-яким з попередніх пунктів, який відрізняється тим, що етап e) проводять спільно для кожних кількох відзнятих зображень.
7. Спосіб за будь-яким з попередніх пунктів, який відрізняється тим, що збирана сільськогосподарська продукція, яка відзнята на відеокамеру на етапі а), являє собою потік зернового матеріалу у збиральній машині.
8. Спосіб за будь-яким з попередніх пунктів, який відрізняється тим, що категорію небажаних частинок становлять биті зерна і що на етапі b) відображення битого зерна розпізнається, якщо розтягування світлої зони у зображенні перебуває у заданому діапазоні.
9. Спосіб за будь-яким з попередніх пунктів, який відрізняється тим, що зображення розбивається на орієнтовані по областях сегменти (S5) і на основі яскравості кожної окремо одержаної області (S7) визначається, чи є вона відображенням небажаної частинки чи ні.
10. Спосіб за будь-яким з попередніх пунктів, який відрізняється тим, що категорію небажаних частинок становить дрібна солома і що у операції b) частинка дрібної соломи (S14, S15) розпізнається, якщо розтягування зони на зображенні у поздовжньому напрямку знаходиться у першому діапазоні, а у поперечному напрямку - в іншому, другому діапазоні.
11. Спосіб за будь-яким з попередніх пунктів, який відрізняється тим, що зображення розбивають на орієнтовані по контурних краях сегменти (S11) і на основі довжини одержаного краю (S13) визначають, чи є він відображенням небажаної частинки чи ні.
Текст
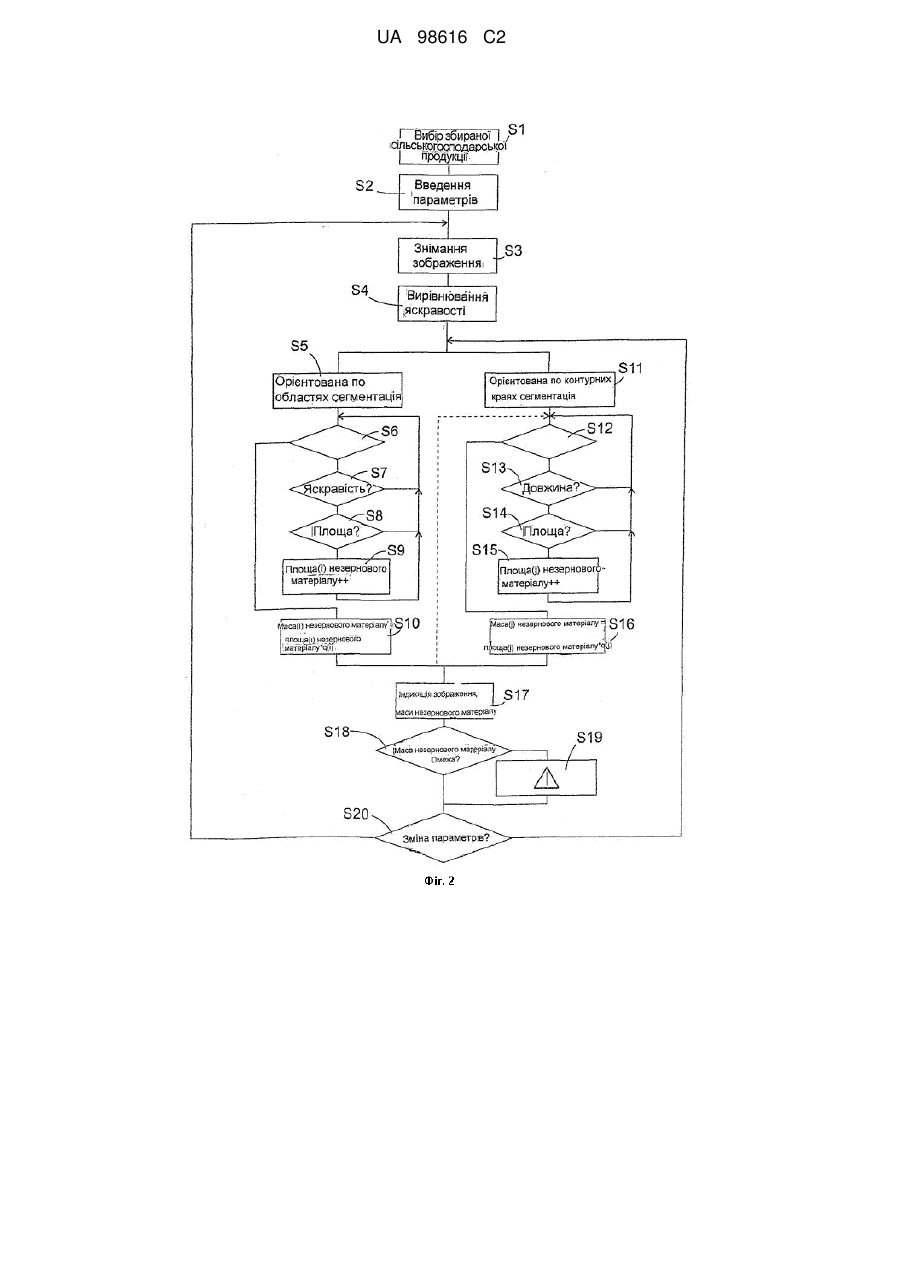
Реферат: Запропоновано спосіб оцінки вмісту небажаних частинок у зерновому матеріалі включає операції: a) знімання на відеокамеру зображення оброблюваного зернового матеріалу (S3); b) розпізнавання відображень як мінімум одного типу небажаних частинок на відзнятому зображенні (S5-S8; S11-S14); c) вимірювання площі (S8; S14), покритої відображенням кожної зареєстрованої частинки на зображенні; d) визначення вмісту небажаних частинок пропорційно до площі зареєстрованих відображень (S9; S15). UA 98616 C2 (12) UA 98616 C2 UA 98616 C2 5 10 15 20 25 30 35 40 45 50 55 Даний винахід належить до способів оцінки вмісту небажаних частинок у збираній сільськогосподарській продукції. Якість, зокрема чистота збираної сільськогосподарської продукції, такої, наприклад, як зерно, має вирішальне значення для можливостей подальшої переробки, а, отже, і для ціни, яку фермер може виручити за зібрану сільськогосподарську продукцію. Зазвичай оптовий покупець сільськогосподарської продукції встановлює гранично допустимі концентрації вмісту небажаних частинок у зерновій продукції, недотримання яких веде до зниження закупівельної ціни. Вид рослинної культури та спосіб збирання врожаю суттєво впливають на кількість небажаних складових частин, що містяться в ньому. Так, у зернозбиральному комбайні при надто крутому встановленні молотарки одержують високу частку битого зерна, яка небажана, тому що вона шкодить стійкості зерна при зберіганні. При надто пологому встановленні молотарки неповністю обмолочені зерна потрапляють у збирану продукцію, чим заважають її подальшій обробці. Полова та дрібна солома, які потрапляють при молотьбі у потік зернового матеріалу, хоча й можуть знов відокремлюватися у підключеному після молотильної стадії повітряному сепараторі, однак надто круте встановлення повітряного сепаратора також веде до втрат зерна. І тому для фермера має велике значення, з одного боку, твердо дотримуватися встановлених йому норм щодо якості збираної сільськогосподарської продукції, а, з іншого боку, запобігати втратам врожаю, яких не повинно бути при дотриманні заданої якості. Для цього бажано мати можливість оцінювати якість збираної сільськогосподарської продукції ще у процесі збирання врожаю, щоб у випадку необхідності вжити заходів для забезпечення належної якості або уникнення зайвих втрат. З патентної заявки ЕР 1763988 А1 відомий спосіб настроювання робочого агрегату збиральної машини, у якому відтворюються зображення потоку оброблюваного зернового матеріалу. Оператор збиральної машини може оцінити за допомогою цих зображень, зокрема у порівнянні з еталонними зображеннями, що зберігаються у пам'яті комп'ютера, ступінь засміченості зернового матеріалу і у випадку необхідності здійснити зміни робочих параметрів на збиральній машині, які покращують якість збираної сільськогосподарської продукції або скорочують втрати у ній. Традиційна оцінка якості збираної сільськогосподарської продукції оператором машини однак не повністю об'єктивна, і дієвість способу суттєво залежить від ступеня уваги, яку оператор може приділяти контролю за якістю збираного врожаю. Цей ступінь уваги зазвичай не дуже високий, тому що оператор одночасно зайнятий керуванням збиральною машиною. Патентна заявка DE 19720121 С2 містить відомості про спосіб кількісного визначення небажаних часток, таких, наприклад, як листя та земля у цукрових буряках або гнилі ягоди у винограді, при якому знімаються кольорові зображення збираної сільськогосподарської продукції, створюються колірні гістограми відзнятих зображень і за складом колірних тонів на гістограмах, співвідносних з небажаними складовими частинами продукції, робиться висновок про склад небажаних складових частин у збираній сільськогосподарській продукції. Щоб постачати якісну продукцію, потрібен такий спосіб чітких колірних відмінностей між бажаними та небажаними частками збираного врожаю. Через те, що спосіб не в змозі розрізнити між відображенням відкритого, добре освітленого, але нечіткого об'єкта і самого по собі світлого, але затемненого іншими об'єктами об'єкта, розмежування полів за цим способом неминуче спотворюється фоновим сигналом, який не можна зневажати. При використанні способу покупцем збираної сільськогосподарської продукції це є терпимим, тому що той для оцінки підлягаючої сплаті ціни лише повинен звірити, щоб були дотримані задані граничні значення щодо чистоти зібраного зернового матеріалу, але він не потребує бачити, у якій мірі можливі розходження з цими граничними значеннями. Саме це робить відомий із патентної заявки DE 19720121 С2 спосіб по суті непридатним для виробника сільськогосподарської продукції. Задача винаходу полягає у тому, щоб усунути недоліки рівня техніки і, зокрема, запропонувати позбавлений фону спосіб оцінки якості збираної сільськогосподарської продукції, яка надає можливість виробникові забезпечити бажану якість збираної сільськогосподарської продукції, не зазнаючи зайвих втрат збираного врожаю внаслідок перебільшених крутих встановлень своєї збиральної машини. Поставлена задача, згідно з винаходом, вирішується способом оцінки вмісту небажаних частинок у зерновому матеріалі з кроками: a) знімання на відеокамеру зображення оброблюваного зернового матеріалу; b) розпізнавання відображень як мінімум однієї категорії небажаних частинок на відзнятому зображенні; 1 UA 98616 C2 5 10 15 20 25 30 35 40 45 50 55 c) вимірювання площі, покритої відображенням кожної зареєстрованої частинки на зображенні; d) визначення вмісту небажаних частинок пропорційно до зареєстрованої площі їх відображень. Тоді як при традиційній побудові гістограми для кожної окремої точки зображення без урахування її сусідніх точок визначають, відповідає її колірне значення небажаній частинці чи ні, і, отже, колірні розбіжності, які випливають з різних умов освітлення та затемнення, не можуть братися до уваги, розпізнавання відображень небажаних частинок містить аналіз точки растра зображення не кожної окремо по собі, а з урахуванням інформаційного вмісту сусідніх точок растра. Таким чином, зокрема, можуть розпізнатися та враховуватися локально розтягнені зразки, які є типовими для відображень певних категорій небажаних частинок. Вимір площі зареєстрованого таким способом відображення частинки дозволяє зробити висновок про її розмір та опосередковано також про її масу. Звідси, на основі складу відображень небажаних частинок на площині зображення можна давати кількісну оцінку також складу цих частинок у зерновому матеріалі. Останнє більш доцільно здійснюється тим, що зареєстрована площа перемножується на поправочний коефіцієнт. Цей емпірично встановлений типовим способом поправочний коефіцієнт враховує різні параметри небажаних частинок, так, наприклад, схильність специфічно легких та крупних частинок накопичуватися на поверхні рухомого потоку зернового матеріалу, а також той факт, що биті зерна, які являють собою важливу категорію небажаних частинок у зерновій збираній продукції, такій, наприклад, як збіжжя, можуть розпізнаватися як такі тільки при сприятливій орієнтації тощо. Більш доцільно у наступному кроці способу e) зареєстровані у кроці с) відображення небажаних частинок відмічаються на зображенні і одержане таким чином зображення показується на екрані дисплея. Це дає можливість операторові постійно контролювати якість виміру, тобто повноту реєстрації небажаних частинок. У найпростішому випадку оператор може використовувати отриману таким способом інформацію, приймаючи більший вміст небажаних частинок, ніж зареєстрований, коли він виявляє, що не всі небажані частинки у кроці b) розпізнаються, або приймаючи менший вміст небажаних частинок, коли у кроці d) бажані частинки розпізнаються більш помилково, ніж небажані. Якщо розпізнавання кроку b) здійснюється на основі щонайменше одного налаштованого параметра, спосіб переважно додатково включає крок погодження вибраного оператором значення параметра. Це дає можливість операторові впливати на розпізнавання небажаних частинок та оптимізувати точність розпізнавання. Якщо оператор змінив такий налаштований параметр, то кроки с) та e) більш доцільно повторюються на подібному відзнятому зображенні, так що оператор може безпосередньо оцінити результат проведеної ним зміни. Звідси, оператор не обов'язково має знати значення налаштованого параметра для розпізнавання небажаних частинок; він може проводити оптимізацію розпізнавання по суті шляхом спроб та помилок. Якщо зафіксований у кроці d) вміст відображень небажаних складових частин перевищує граничне значення, більш доцільно видається попереджувальний сигнал, щоб спонукати оператора підкорегувати параметри обробки збираної сільськогосподарської продукції і таким чином поліпшити її якість. Згідно з наступною формою розвитку способу, налаштування цих параметрів може здійснюватися також автоматизованою системою. Для того, щоб виявити статистичні відхилення, крок e) більш доцільно проводиться спільно для кожних кількох відзнятих зображень. Така спільна обробка може основуватися, наприклад, на тому, що декілька відзнятих зображень об'єднуються багаторазовими площами в одному знімку і кроки способу від кроку b) здійснюються на об'єднаному зображенні. Альтернативно кроки від b) до d) способу можуть проводитися для кожного зображення також окремо і при цьому зафіксовані частки усереднюються. Запропонований спосіб особливо підходить для контролю потоку зернового матеріалу у збиральній машині, такій, наприклад, як зернозбиральний комбайн. Категорію небажаних частинок можуть складати, як вже згадувалося, биті зерна. Відображення такого битого зерна може розпізнаватися як світла зона на знімку, яка відповідає пошкодженому борошнистому ядру, тоді як оточуюча оболонка зерна зазвичай є темнішою. Щоб можна було відрізнити бите зерно від частинок іншого виду і/або штучно викликаних освітлювальних змін, світла зона більш доцільно розпізнається як бите зерно тоді, коли її розтягнення знаходиться у заданому діапазоні. 2 UA 98616 C2 5 10 15 20 25 30 35 40 45 50 55 60 Взагалі можна говорити, що згідно з переважною формою і, зокрема, коли мова йде про розпізнавання небажаних частинок, які своєю яскравістю (в одному або кількох спектральних діапазонах) відрізняються від бажаного зернового матеріалу, зображення переважно розбивається на орієнтовані по областях сегменти і на основі яскравості кожної окремо отриманої області визначається, є вона відображенням небажаної частинки чині. Якщо категорію небажаних частинок становить дрібна солома, це у кроці b) завжди може розпізнаватися тоді, коли розтягнення зони на зображенні знаходиться у поздовжньому напрямку у першому діапазоні значень та у поперечному напрямку - в іншому, другому діапазоні значень. Загалом для розпізнавання небажаних частинок, які більше своєю формою, аніж своєю яскравістю або кольором відрізняються від бажаної збираної сільськогосподарської продукції, зображення більш доцільно може бути розбите на орієнтовані по контурних краях сегменти і на основі довжини кожного отриманого краю визначається, являє він собою небажану частинку чині. Предметом винаходу є також комп'ютерна програма із засобами програмного кодування для здійснення кроків способу, які вище описані, на з'єднаному з відеокамерою комп'ютері, або комп'ютерний програмний продукт із засобами програмного кодування, які зберігаються на зчитуваному комп'ютером інформаційному носієві, щоб здійснити вищеописаний спосіб на з'єднаному з відеокамерою комп'ютері. Наступним предметом винаходу є з'єднаний з відеокамерою та налаштований для здійснення способу сам комп'ютер, зокрема, коли він вбудований у збиральну машину, а відеокамера розташована так, щоб проводити зйомку зображень потоку оброблюваного зернового матеріалу у збиральній машині. Такий комп'ютер у подальшому може бути налаштований так, щоб регулювати параметри переробки збираної сільськогосподарської продукції у збиральній машині на основі зафіксованого вмісту небажаних частинок. Інші відмітні ознаки та переваги винаходу випливають з подальшого опису прикладів виконання з посиланням на фігури креслень, що додаються, де показано: Фіг.1 - сільськогосподарська збиральна машина у формі схематичного вигляду збоку зернозбирального комбайна; Фіг.2 - блок-схема розробленої бортовим комп'ютером зернозбирального комбайна програми для контролю якості збираної сільськогосподарської продукції; і Фіг.3 - приклад знімка, виданого комп'ютером для показу на екрані дисплея у кабіні водія зернозбирального комбайна. Фіг.1 показує схематичний вигляд збоку зернозбирального комбайна 1. Жатка 2 для злакових культур служить для скошування та підбирання стебел злаків з поверхні поля 32 та подачі їх до живильника 3. У живильнику 3 знаходиться обертовий ланцюговий транспортер 4 з поперечними тягами, який доставляє збирану сільськогосподарську продукцію до розташованих у наступній послідовності молотильних агрегатів 5, 6. Збирана сільськогосподарська продукція наприкінці живильника 3 знімається попередньо прискорювальним барабаном 5 і по довжині окружності попередньо прискорювального барабана 5 прискорюється між ним та підбарабанням 8. Прискорена рослинна маса передається у молотильний барабан 6 і знов прискорюється. В результаті вибивальної та теркової дії попередньо прискорювального барабана 5 та молотильного барабана 6 і діючої на перероблювану продукцію відцентрової сили зерновий матеріал відокремлюється з колосків та соломи і через проникне для зернового матеріалу підбарабання 8 потрапляє на висувне підготовче днище 27 для попереднього сортування маси. Солома, що виходить з молотильного барабана 6, за допомогою реверсивного барабана 7 відводиться на декілька розташованих один біля одного по робочій ширині соломотрясів 9. Коливальний рух соломотрясів 9, а також їх ступінчаста форма сприяють переміщенню соломи до заднього кінця зернозбирального комбайна та осадженню маси продукції, яка ще залишається у соломі. Ця залишкова маса по коливально рухомій зворотній дошці 28 так само передається на підготовче днище 27. Зерновий матеріал з іншими домішками, що знаходяться на підготовчому днищі 27, такими як частки соломи, полова та колоскові частинки, сепарується внаслідок коливального руху підготовчого днища 27 та його ступінчастої форми і наступними очищувальними агрегатами подається до верхнього решета 10 та нижнього решета 11. Передача здійснюється через уступ перепаду 34, який продувається очищувальною повітродувкою 24, на верхнє решето 10. Це решето, а також нижнє решето 11, що знаходиться під ним, являють собою, як правило, пластинчасті решета з окремо встановлюваними у кожному просвітами отворів. Нижнє, а також верхнє решета 10, 11 продуваються наскрізь повітряним потоком, що виробляється очищувальною повітродувкою 24. Коливальний рух решіт 3 UA 98616 C2 5 10 15 20 25 30 35 40 45 50 55 60 10, 11, а також повітряний потік сприяють переміщенню маси зернового матеріалу та його домішок до заднього кінця збиральної машини. За допомогою уступу перепаду 34 великі та легкі домішки підхоплюються повітряним потоком, перш ніж вони досягнуть верхнього решета 10, і виносяться із зернозбирального комбайна 1. Менші та важчі складові частини збираної сільськогосподарської продукції із підготовчого днища 27 через уступ перепаду 34 потрапляють на верхнє решето 10. Залежно від настройки просвітів отворів верхнього решета окремі зерна та інші складові частини збираної сільськогосподарської продукції випадають крізь це решето і потрапляють таким чином на нижнє решето 11. Солома та необмолочені колоски коливально відштовхуються передньою частиною решета і падають у задній частині верхнього решета 10 крізь верхнє решето 10 безпосередньо у так званий схід. Нижнє решето 11 має, як правило, дрібнішу структуру пластинок решета, ніж верхнє решето 10, і звичайно встановлюється з меншими просвітами отворів порівняно з верхнім решетом 10. Більші та легші складові частини збираної сільськогосподарської продукції, такі як не повністю вимолочене зерно з половою, колосові частинки або стеблові частинки, якщо вони крізь верхнє решето 10 потрапили на нижнє решето 11, за допомогою коливального руху та повітряного потоку передаються у схід. Очищений зерновий матеріал сам випадає безпосередньо крізь нижнє решето 11 і за допомогою подавального гвинтового шнека та зерновим елеватором 13 транспортується до зернового бункера 33. Відеокамера 20 та джерело світла для освітлення поля огляду відеокамери 20 встановлені на шляху зерна у підхожому місці по ходу вниз від нижнього решета 11. Вони можуть бути встановлені, наприклад, під нижнім решетом 11 і орієнтованими на простягнену під нижнім решетом 11, нахилену до зернового елеватора 13, струшувальну дошку 21, для того, щоб знімати зображення зернового матеріалу, що струменем спадає на неї; так само враховується розміщення на самому зерновому елеваторі 13. Перероблювана зернова маса, що потрапляє у схід з решета, подається за допомогою постачального гвинтового шнека та сходового елеватора 12 над попередньо прискорювальним барабаном 5 знов у молотильний процес. Зернозбиральний комбайн 1 обладнаний кабіною 35 водія, у якій розташований керуючий та відеоконтрольний пристрій 29, який функціонує як інтерфейс з користувачем бортового комп'ютера 30. Фіг.2 показує блок-схему способу, виконану з'єднаним з відеокамерою 20 бортовим комп'ютером 30. Кожного разу на початку процесу збирання врожаю бортовий комп'ютер 30 у кроці S1 вимагає від водія повідомити вид збираної сільськогосподарської рослинної культури. Бортовий комп'ютер 30 має у своєму розпорядженні базу даних, в якій зберігаються необхідні для описаної у подальшому обробки норми параметрів для різних можливих збираних культур. Ця база даних завантажена виробником комбайна під час його виготовлення належними значеннями параметрів для різних видів збираних сільськогосподарських культур, але у міру потреби може коригуватися оператором для приведення у відповідність до нових вимог. Згідно з переважною формою винаходу, введені у кроці S2 параметри містять як ті, що стосуються у подальшому більш детально описаної обробки зроблених відеокамерою 20 зображень, так і регулювання ступенів молотьби та очищення зернового комбайна 1, як, наприклад, швидкості обертання барабанів, ширини отворів решіт, продуктивності повітродувки і т.п., які справляють вплив на якість та чистоту одержуваного зернового матеріалу та можуть настроюватися бортовим комп'ютером 30 за допомогою підхожих виконавчих елементів (не показані) до ступенів молотьби та очищення. Ці значення параметрів зазвичай встановлені такими, що за нормальних умов праці у місці розташування відеокамери 20 одержують потік зернового матеріалу доброї якості. Згідно з більш простою формою винаходу, введені у кроці S2 параметри стосуються тільки обробки зображень відеокамери 20 бортовим комп'ютером 30, а в обов'язок водія входить попереднє встановлення ступеня молотьби та очищення з поправкою до відповідної збираної сільськогосподарської продукції. Як тільки безперервний потік оброблюваного зернового матеріалу проходить повз відеокамери 20, бортовий комп'ютер 30 видає їй у кроці S3 команду зробити знімок цього зернового матеріалу. Для підготовки обробки зображення у вузькому розумінні спочатку у кроці S4 на цьому знімку проводиться вирівнювання освітленості, тобто ділянок зображення, які через розтягнення, що є значно більшим, ніж частинка бажаного зернового матеріалу, бувають світлішими або темнішими порівняно з середнім значенням відзнятого зображення, комп'ютеризовано затушовуються або відповідно освітлюються, щоб вирівняти випадкові відхилення освітленості, які, наприклад, випливають із локально різних товщин шарів 4 UA 98616 C2 5 10 15 20 25 30 35 40 45 50 55 оброблюваного зернового матеріалу, - і, тим самим, різних віддалень його від джерела світла, або локальних затемнень. Одержане таким чином зображення піддається сегментації. Вона може бути орієнтована по областях або по контурних краях; якщо бортовий комп'ютер 30 має достатню обчислювальну потужність, то можуть проводитися також різні сегментації на одному і тому ж зображенні. Тут насамперед повинна розглядатися орієнтована по областях сегментація S5. У такій сегментації зображення розбивається на велику кількість областей, причому кожна область позначається значенням світлості або кольору, яке відрізняє її від сусідніх областей та підтверджує припущення, що в області наявний саме той об'єкт. Способи для орієнтованої по областях сегментації відомі під ключовими словами: нарощування областей, розбивка на групи, зв'язування за принципом піраміди, а також розбивка та злиття, і не потребують тут окремого пояснення. Після виконання сегментації у кроці 6 вибирається область зображення, а у кроці S7 перевіряється, чи має вона яскравість, що достатньо відрізняється від заданого значення або середнього значення зображення, так щоб останнє могло б бути досліджуваною областю, наприклад, відображенням битої площини зерна. У випадку, якщо ні, то у кроці S6 вибирається нова область. Якщо яскравість відрізняється достатньо, то спосіб переходить до кроку S8, в якому з'ясовується площа даної області, наприклад, шляхом підрахунку пікселів зображення, що їй належать. Одержана таким способом площа, крім того, у кроці S9 додається до встановленого раніше у кроці S5 на нуль числового значення площі(і) незернового матеріалу (NKFläche(i)), яке на площині зображення являє собою порогову величину для частки відображень незернового матеріалу і-типу, тут площин пошкоджень битих зерен. Повторення кроків S7-S9, беручи за основу розпізнані параметри, можуть додаватися для незернового матеріалу інших типів. При цьому у кроці S6 вибирається нова область, а саме до тих пір, поки будуть оброблені всі області. Тоді спосіб переходить до кроку S10, в якому числове значення площі(і) незернового матеріалу (NKFläche(i)) помножується на специфічний для виду збираної сільськогосподарської продукції та типу незернового матеріалу поправочний коефіцієнт q(i) для того, щоб одержати оціночне значення для частки маси(і) незернового матеріалу (NKMasse(i)) битих зерен до загальної маси збираного матеріалу. Поправочний коефіцієнт q(i) є емпіричною величиною, яка належить до введених у кроці S2 параметрів. Наступну важливу категорію небажаних частинок нарівні з битими зернами становить дрібна солома. її колір або світлість не суттєво відрізняється від кольору або світлості зерна, так що переважною для її розпізнавання є сама по собі орієнтована по контурних краях сегментація (S11). Але щоб мінімізувати обчислювальні витрати бортового комп'ютера 30, можна також, як позначено за допомогою штрихованої стрілки у блок-схемі способу, відмовитися від орієнтованої по краях сегментації, сприймаючи як край кожну з границь контурів ідентифікованих у кроці S5 областей. Тепер у кроці S12 вибирається кожен з одержаних таким чином контурних країв, а у кроці S13 спочатку оцінюється його довжина. Якщо вона вкладається у задане граничне значення, тоді вважається, що край обмежує зображення зерна, і спосіб повертається до кроку S12, щоб вибрати новий контурний край. Коли ж край досить видовжений, тоді у кроці S14 оцінюється площа обмеженої цим краєм області або також її ширина, тобто її розтягування поперечно до контурного краю, що розглядається, і при достатній величині вважається, що йдеться про частинку дрібної соломи. її площа додається у кроці S15 до так само встановленого при сегментації на нуль числового значення площі(і) незернового матеріалу (NKFläche(j)). Наступні контурні краї площі, що додається, виключаються з множини ще підлягаючих обробці, вибираних у кроці S12 країв, щоб уникнути багаторазового обчислення однієї і тієї ж частинки соломи. Після того, як всі контурні краї будуть оброблені у такий спосіб, частка маси(і) незернового матеріалу (NKMasse(j)) дрібної соломи обчислюється у кроці S16 шляхом помноження числового значення площі незернового матеріалу (NKFläche(j)) на відповідний поправочний коефіцієнт q(j). У кроці S17 бортовий комп'ютер 30 показує на екрані дисплея керуючо-/відеоконтрольного пристрою 29 одержане у кроці S3 зображення, в якому виділено всі розпізнані як відображення незернових складових частин області зображення, а також обчислені частки маси(і) незернового матеріалу (NKMasse(i)) битого зерна та масив незернового матеріалу (NKMasse(j)) дрібної соломи. Водій одержує таким чином аналіз дійсної на поточний час якості збираної сільськогосподарської продукції і водночас він може переконатися в якості оцінки, перевіряючи, чи всі відмічені області зображення фактично містять незернові складові частини або чи всі 5 UA 98616 C2 5 10 15 20 25 30 35 40 45 50 55 незернові складові частини, які він розпізнає на зображенні, були розпізнані також бортовим комп'ютером 30. У кроці S18 бортовий комп'ютер 30 перевіряє, чи не перевищує вміст однієї з цих контрольованих незернових складових частин задане граничне значення. Якщо так, то у кроці S19 застосовується контрзахід. Він може полягати у тому, що бортовий комп'ютер 30 сам вибирає робочий параметр ступеня молотіння і/або очищення, який має вплив на згадуваний вміст незернового матеріалу, і регулює його так, щоб скоротити вміст незернового матеріалу. Альтернативно контрзахід кроку S19 також може обмежуватися тим, щоб повідомляти водієві попередження, яке змушує того самотужки проводити необхідні кореляції параметрів. Якщо водій на основі показаного у кроці S17 зображення помітить значущу динаміку зростання помилок розпізнавання, він більш доцільно через керуючий-/відеоконтрольний пристрій 29 змінить те чи інше досліджуване у кроках S7, S8, S13, S14 порогове значення параметрів. Якщо це відбувається, спосіб кроком S20 повертається назад до сегментації кроку S5 або S11 і повторює її та розпізнавання незернових складових частин продукції на основі того ж самого зображення, що й раніше. Коли зображення, що обробляється, знов показується у кроці S17, водій може безпосередньо бачити, кращим чи гіршим стало розпізнавання незернових складових частин продукції, і проведена зміна параметра відповідно до цього залишається або знову відхиляється. Фіг.3 показує приклад індикаторного зображення на екрані дисплея керуючого та відеоконтрольного пристрою 29. Текстове вікно у верхній частині екрана дисплея показує типи незернового матеріалу, що розпізнається: бите зерно, полову і дрібну солому. Сусідні позначенням типу діалогові поля 36 можуть бути заповнені водієм значеннями 0, 1, 2, які відповідають кожному з робочих режимів - "вимкнене розпізнавання", "включене розпізнавання" з параметрами розпізнавання, що зберігаються у пам'яті комп'ютера, та, відповідно, "змінити параметри розпізнавання". Для типу незернового матеріалу "дрібна солома" активізований режим "змінити параметри розпізнавання" і показані підлягаючі зміні параметри довжини та площі, а також їхні дійсні на даний час значення. Нижня частина екрана дисплея показує відзняте відеокамерою 20 зображення. Розпізнана на зображенні частинка соломи виділена висвічуваною рамкою 37. Посилальні позначення 1. Зернозбиральний комбайн 2. Жатка для злакових культур 3. Живильник 4. Ланцюговий транспортер живильника 5. Попередньо прискорювальний барабан 6. Молотильний барабан 7. Реверсивний барабан 8. Підбарабання 9. Соломотряс 10. Верхнє решето 11. Нижнє решето 12. Елеватор для сходового продукту 13. Зерновий елеватор 20. Відеокамера 21. Струшувальна дошка 24. Очищувальна повітродувка 27. Підготовче днище 28. Зворотна дошка 29. Керуючий та відеоконтрольний пристрій 30. Бортовий комп'ютер 33. Зерновий бункер 34. Уступ перепаду 35. Кабіна водія 36. Діалогове поле 37. Рамка. ФОРМУЛА ВИНАХОДУ 60 1. Спосіб оцінки вмісту небажаних частинок у зерновому матеріалі, який включає наступні етапи: 6 UA 98616 C2 5 10 15 20 25 30 35 40 a) знімання на відеокамеру зображення оброблюваного зернового матеріалу (S3); b) розпізнавання відображень як мінімум одного типу небажаних частинок на відзнятому зображенні (S5-S8; S11-S14); c) вимірювання площі (S8; S14), покритої відображенням кожної зареєстрованої частинки на зображенні; d) визначення вмісту небажаних частинок пропорційно до площі зареєстрованих відображень (S9; S15), який відрізняється тим, що етап розпізнавання b) здійснюють на основі щонайменше одного настроюваного параметра, з наступним етапом; f) погодження вибраного оператором значення параметра (S20). 2. Спосіб за п. 1, який відрізняється тим, що у операції d) зареєстровану площу помножують на поправочний коефіцієнт (S10; S16), щоб одержати частку чужорідних домішок, виражену як співвідношення маси чужорідних домішок до маси збираної сільськогосподарської продукції. 3. Спосіб за п. 1 або 2, який відрізняється тим, що включає подальші етапи: e) розпізнавання зареєстрованих у операції с) відображень небажаних частинок у зображенні та відтворення на екрані дисплея (S17) одержаного таким способом зображення. 4. Спосіб за будь-яким з попередніх пунктів, який відрізняється тим, що після здійснення кожного етапу f) (S20) етапи с) (S8; S14) та e) (S17) повторюють на одному і тому ж відзнятому зображенні. 5. Спосіб за будь-яким з попередніх пунктів, який відрізняється тим, що включає подальший етап: g) створення попереджувального сигналу (S19), якщо зафіксований вміст небажаних частинок перевищує граничне значення. 6. Спосіб за будь-яким з попередніх пунктів, який відрізняється тим, що етап e) проводять спільно для кожних кількох відзнятих зображень. 7. Спосіб за будь-яким з попередніх пунктів, який відрізняється тим, що збирана сільськогосподарська продукція, яка відзнята на відеокамеру на етапі а), являє собою потік зернового матеріалу у збиральній машині. 8. Спосіб за будь-яким з попередніх пунктів, який відрізняється тим, що категорію небажаних частинок становлять биті зерна і що на етапі b) відображення битого зерна розпізнається, якщо розтягування світлої зони у зображенні перебуває у заданому діапазоні. 9. Спосіб за будь-яким з попередніх пунктів, який відрізняється тим, що зображення розбивається на орієнтовані по областях сегменти (S5) і на основі яскравості кожної окремо одержаної області (S7) визначається, чи є вона відображенням небажаної частинки чи ні. 10. Спосіб за будь-яким з попередніх пунктів, який відрізняється тим, що категорію небажаних частинок становить дрібна солома і що у операції b) частинка дрібної соломи (S14, S15) розпізнається, якщо розтягування зони на зображенні у поздовжньому напрямку знаходиться у першому діапазоні, а у поперечному напрямку - в іншому, другому діапазоні. 11. Спосіб за будь-яким з попередніх пунктів, який відрізняється тим, що зображення розбивають на орієнтовані по контурних краях сегменти (S11) і на основі довжини одержаного краю (S13) визначають, чи є він відображенням небажаної частинки чи ні. 7 UA 98616 C2 8 UA 98616 C2 9 UA 98616 C2 Комп’ютерна верстка А. Рябко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod to control the quality of harvested farm produce
Автори англійськоюBehnke Willi
Назва патенту російськоюСпособ контроля качества убранной сельскохозяйственной продукции
Автори російськоюБенке Вилли
МПК / Мітки
МПК: A01D 34/412, A01D 41/00
Мітки: контролю, збираної, спосіб, якості, сільськогосподарсько, продукції
Код посилання
<a href="https://ua.patents.su/12-98616-sposib-kontrolyu-yakosti-zbirano-silskogospodarsko-produkci.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю якості збираної сільськогосподарської продукції</a>
Спосіб контролю якості плодоовочевої продукції
Номер патенту: 64569
Опубліковано: 16.02.2004
Автори: Сабо Андрій Георгійович, Сабо Ольга Борисівна, Стручаєв Микола Іванович, Стручаєв Костянтин Миколайович
МПК: G01N 33/02
Мітки: плодоовочевої, спосіб, якості, продукції, контролю
Формула / Реферат:
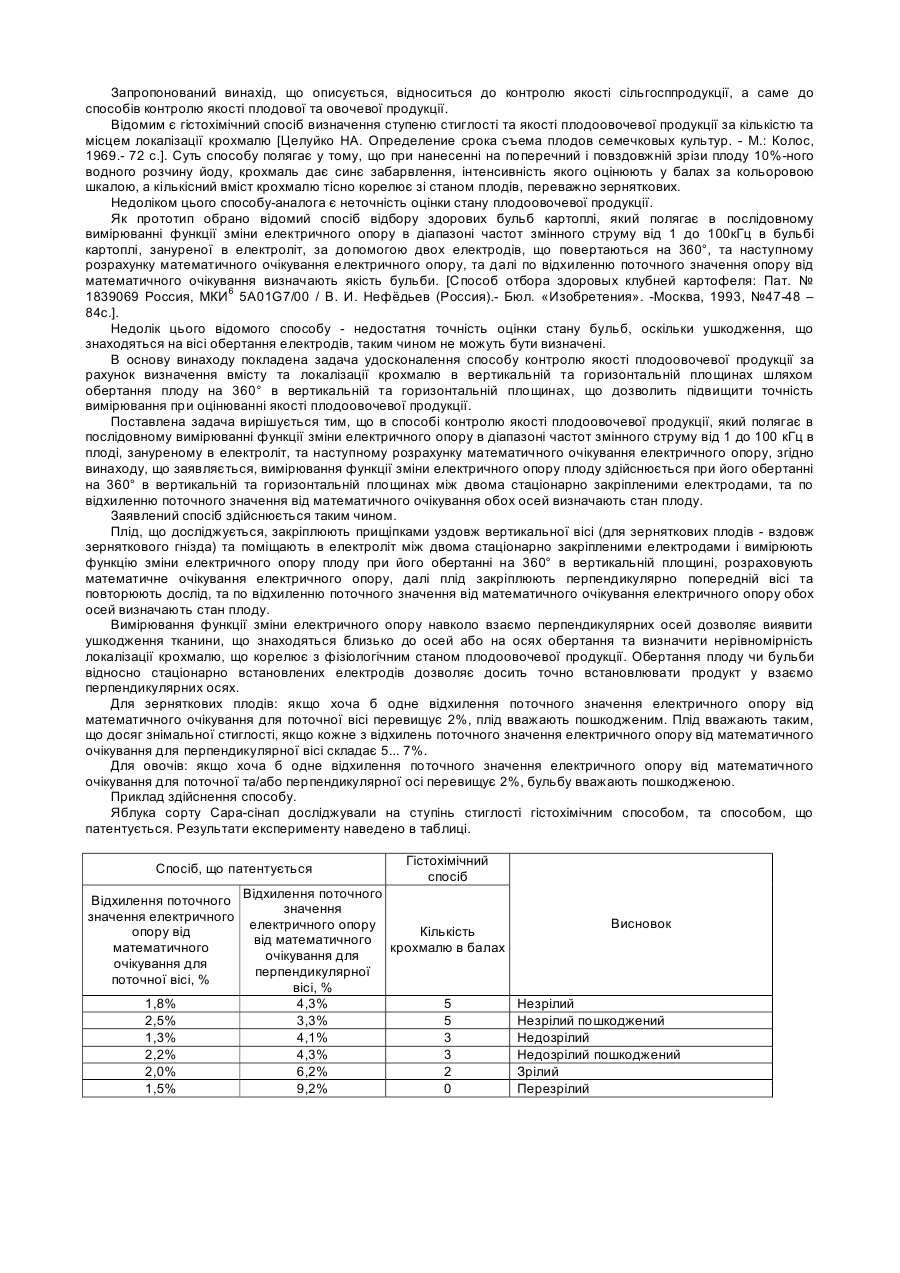
Спосіб контролю якості плодоовочевої продукції, що полягає у послідовному вимірюванні функції зміни електричного опору у діапазоні частот змінного струму від 1 до 100 кГц в плоді, зануреному в електроліт, та наступному розрахунку математичного очікування електричного опору, який відрізняється тим, що вимірювання функції зміни електричного опору плоду здійснюють при його обертанні на 360° в вертикальній та горизонтальній площинах між двома...
Спосіб контролю якості плодоовочевої продукції
Номер патенту: 95793
Опубліковано: 12.09.2011
Автори: Ялпачик Володимир Федорович, Стручаєв Микола Іванович
МПК: G01N 7/00
Мітки: плодоовочевої, якості, контролю, спосіб, продукції
Формула / Реферат:
Спосіб контролю якості плодоовочевої продукції, що полягає у визначенні строків знімання плодів, який включає відбір плодів перед зніманням їх на зберігання, проведення аналізу на виділення продуктів життєдіяльності, який відрізняється тим, що плід, який досліджують, закріплюють та стискають порожнистим еластичним здавлюючим елементом, в якому як компенсуючий газ використовують повітря або азот високої чистоти, який виконаний з можливістю...
Пристрій визначення тиску для контролю якості плодоовочевої продукції
Номер патенту: 41466
Опубліковано: 25.05.2009
Автори: Стручаєв Микола Іванович, Ялпачик Володимир Федорович, Стручаєв Костянтин Миколаєвич
МПК: G01N 7/00
Мітки: плодоовочевої, пристрій, визначення, тиску, продукції, якості, контролю
Формула / Реферат:
Пристрій визначення тиску для контролю якості плодоовочевої продукції, що включає здавлюючий елемент, з'єднаний з повітряним насосом, трубкою з розташованим на ній манометром, який відрізняється тим, що він додатково оснащений сталевою трубкою з отворами по всій довжині й діаметру та шомполом.
Спосіб збереження сільськогосподарської продукції
Номер патенту: 69320
Опубліковано: 16.08.2004
Автори: Тенденко Сергій Олександрович, Жабер Мохамед Абдалак, Кансо Виссам Али, Шапорев Валерій Павлович
МПК: A01F 25/00
Мітки: спосіб, збереження, продукції, сільськогосподарсько
Формула / Реферат:
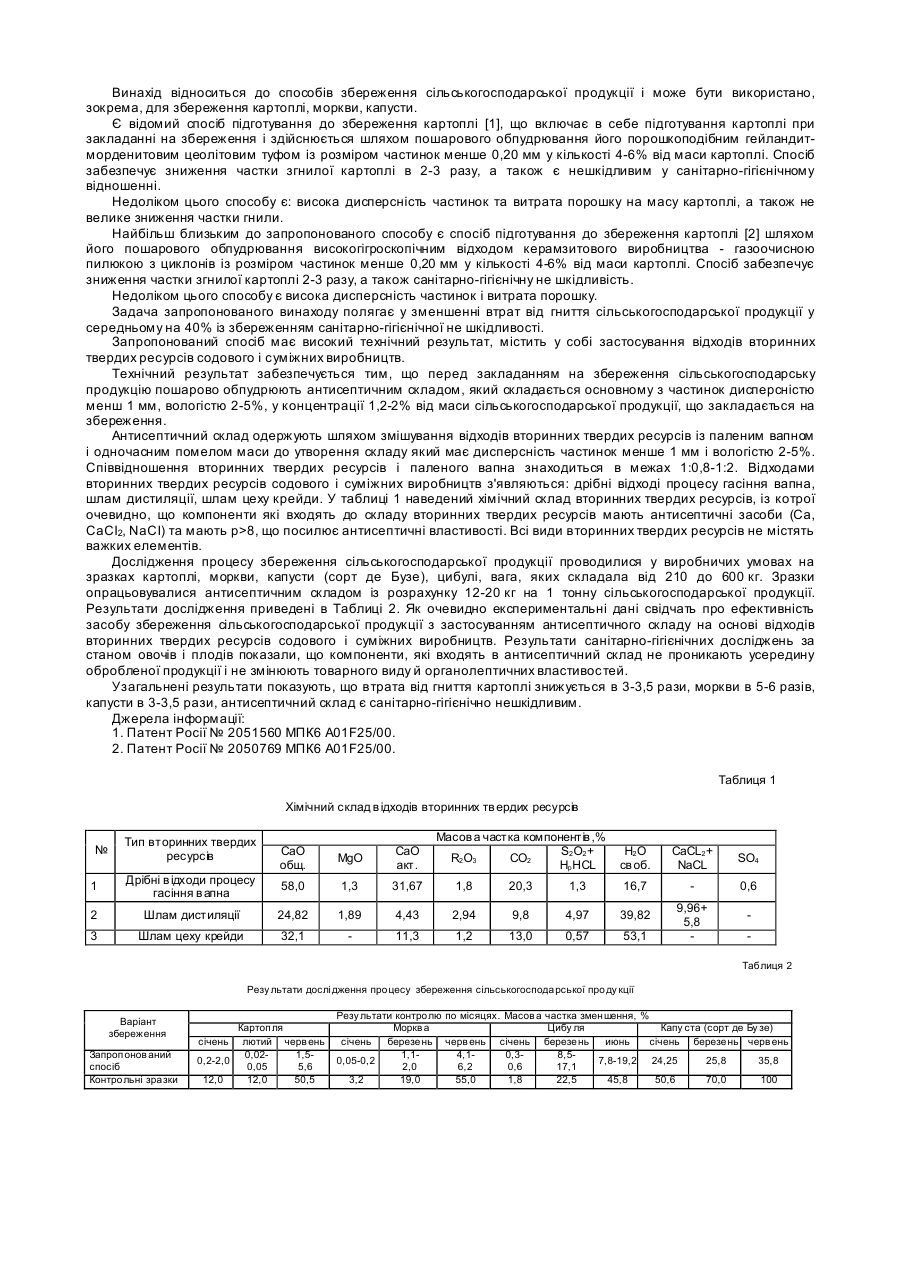
Спосіб збереження сільськогосподарської продукції, що включає пошарове обпудрювання сільськогосподарської продукції відходами виробництва перед закладанням на збереження, який відрізняється тим, що як відходи виробництва використовують антисептичний склад на основі відходів вторинних твердих ресурсів содового і суміжних виробництв змішаного з паленим вапном у співвідношенні 1:0,8 - 1:2 з одночасним помелом до дисперсності частинок менше 1 мм...
Скануючий пристрій для контролю якості плодової та овочевої продукції

Номер патенту: 68041
Опубліковано: 15.07.2004
Автори: Сабо Ольга Борисівна, Стручаєв Микола Іванович, Сабо Андрій Георгійович, Стручаєв Костянтин Миколайович
МПК: G01N 33/02
Мітки: овочевої, плодової, пристрій, скануючий, якості, продукції, контролю
Формула / Реферат:
Скануючий пристрій для контролю якості плодової та овочевої продукції, що має генератор, міст опору, омметр, вимірювальне середовище, який відрізняється тим, що вимірювальне середовище виконано у вигляді ємності, наповненої електролітом з зануреними в нього стаціонарно закріпленими електродами, яка закривається кришкою, причому кришку, дно та бокові стінки середовища обладнано пазами з встановленими в них прищіпками у двох взаємно...
Попередній патент: Спосіб одержання складного ефіру органічних кислот і 5-гідроксиметилфурфуролу
Наступний патент: Спосіб одержання модифікованого активованого вугілля та сигарета, що його містить
Випадковий патент: Спосіб підігріву агломераційної шихти