Пристрій суміщення вершини алмазного різця з віссю обертання вала аеростатичної шпиндельної опори
Номер патенту: 36956
Опубліковано: 16.04.2001
Автори: Шепелєв Анатолій Олександрович, Зіненко Володимир Миколайович

Текст
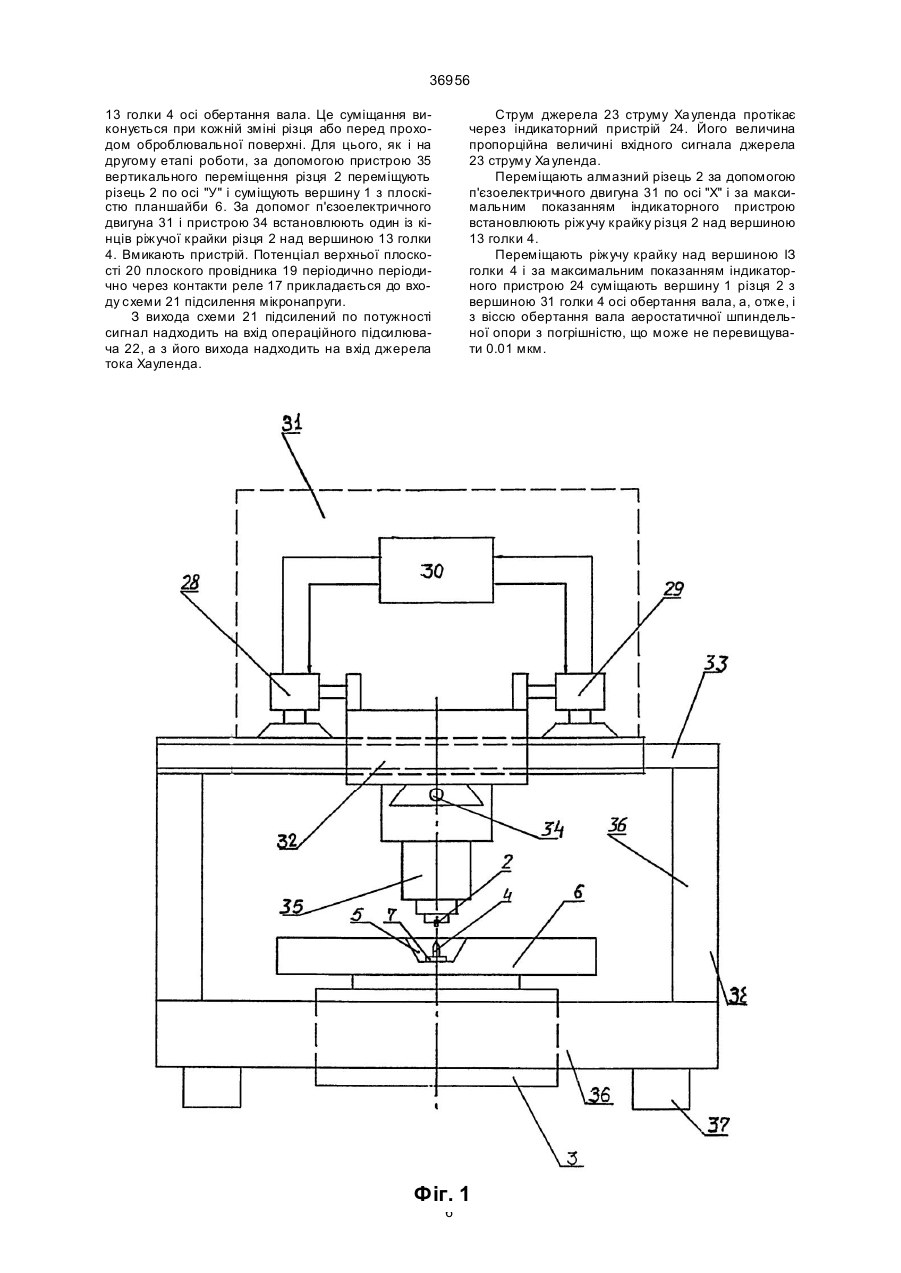
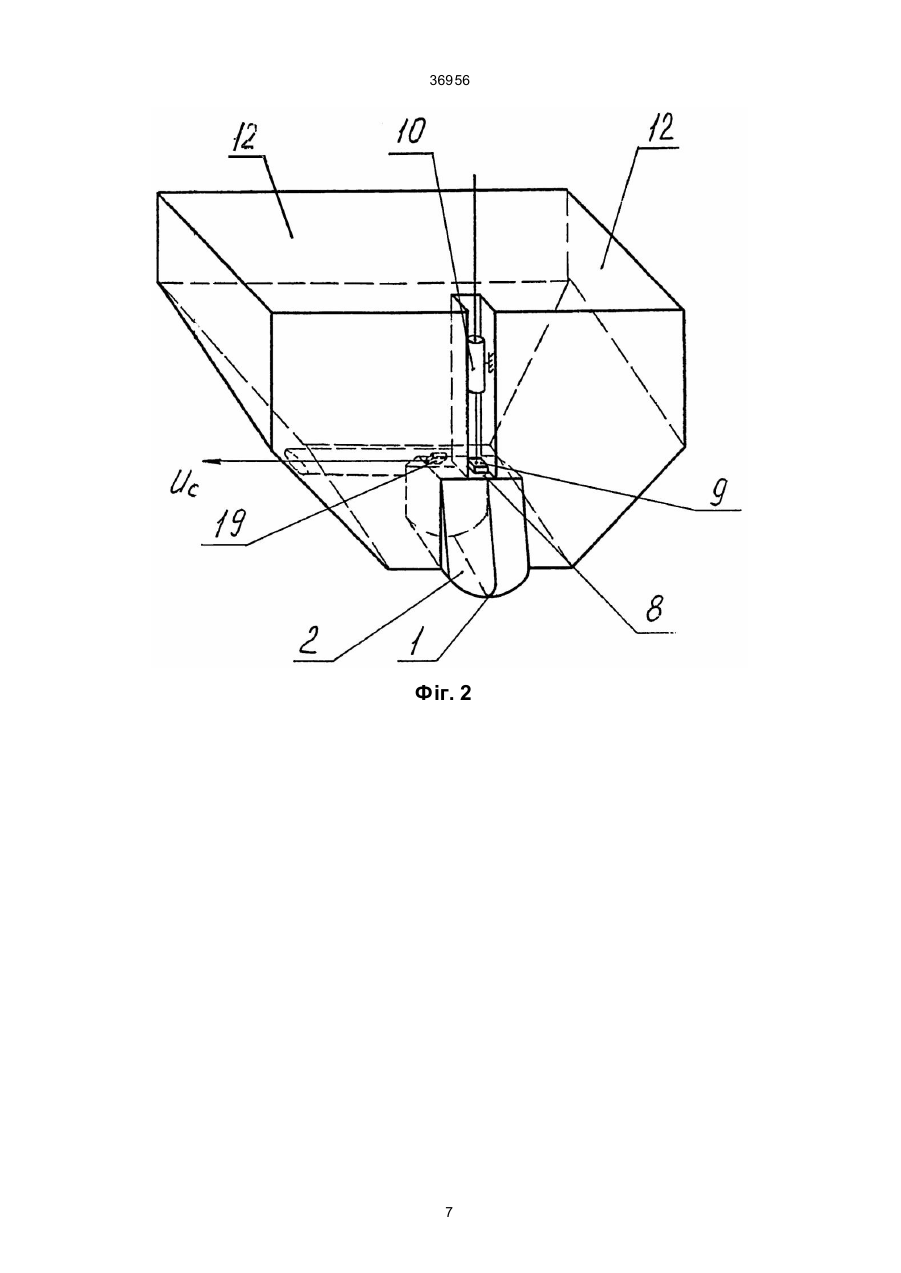
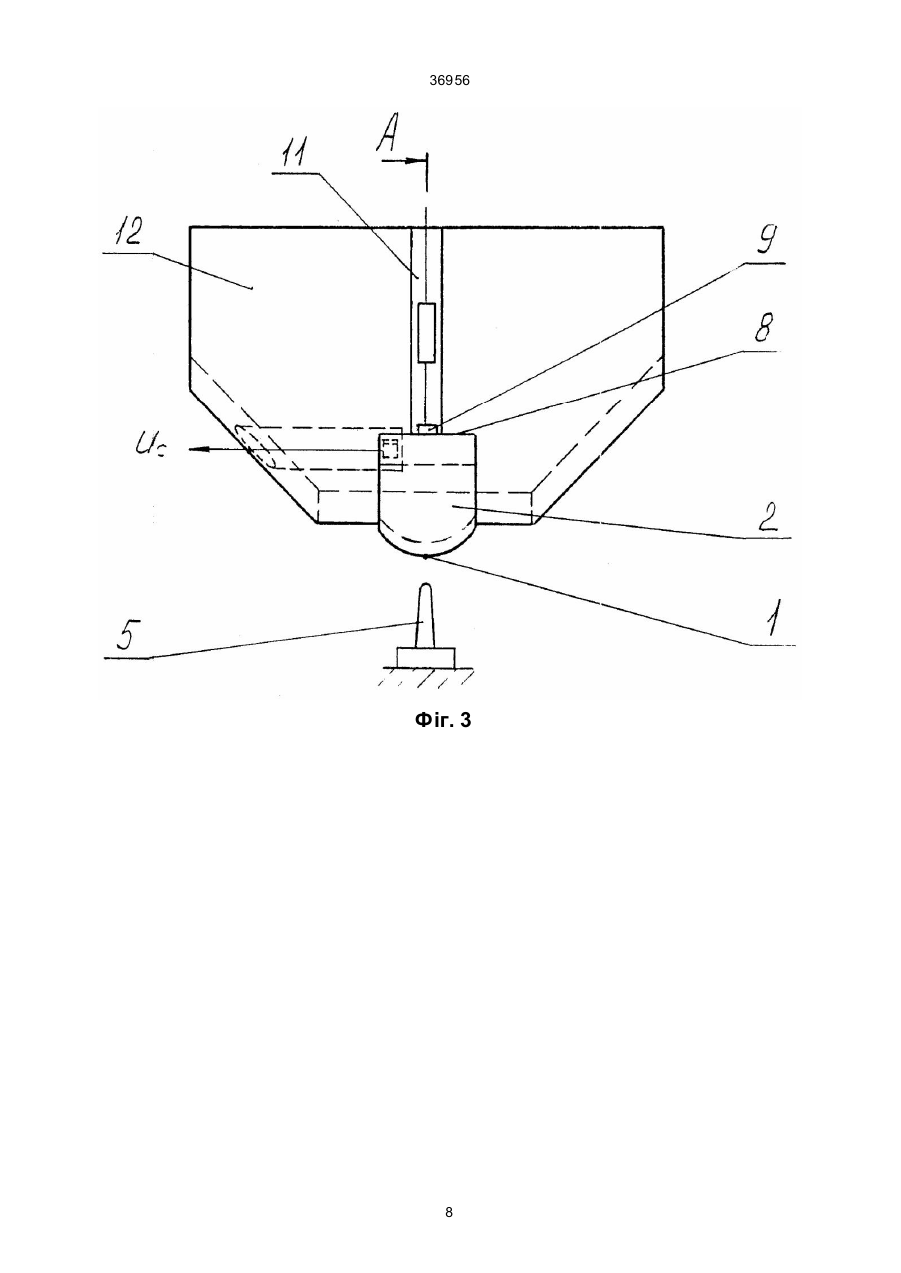
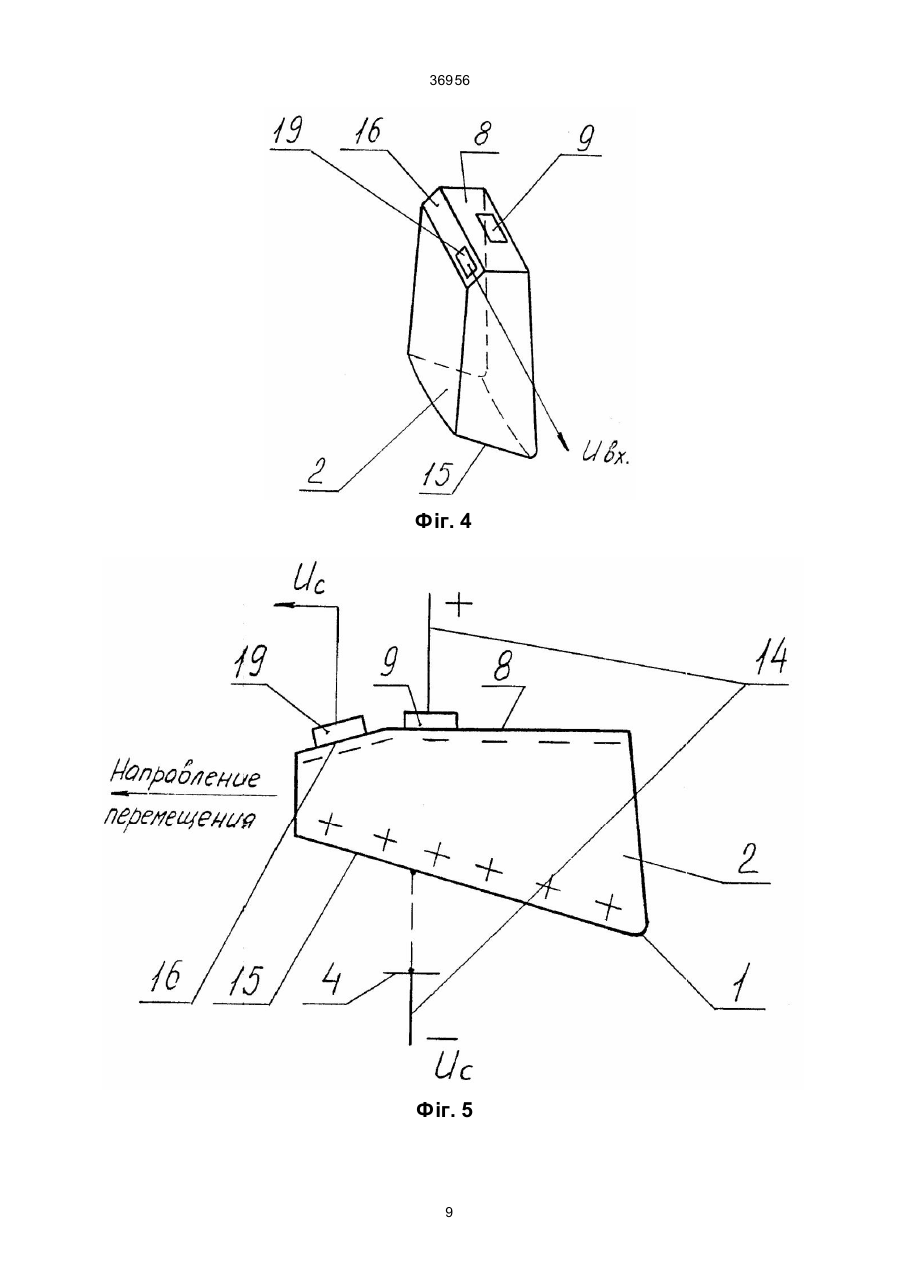
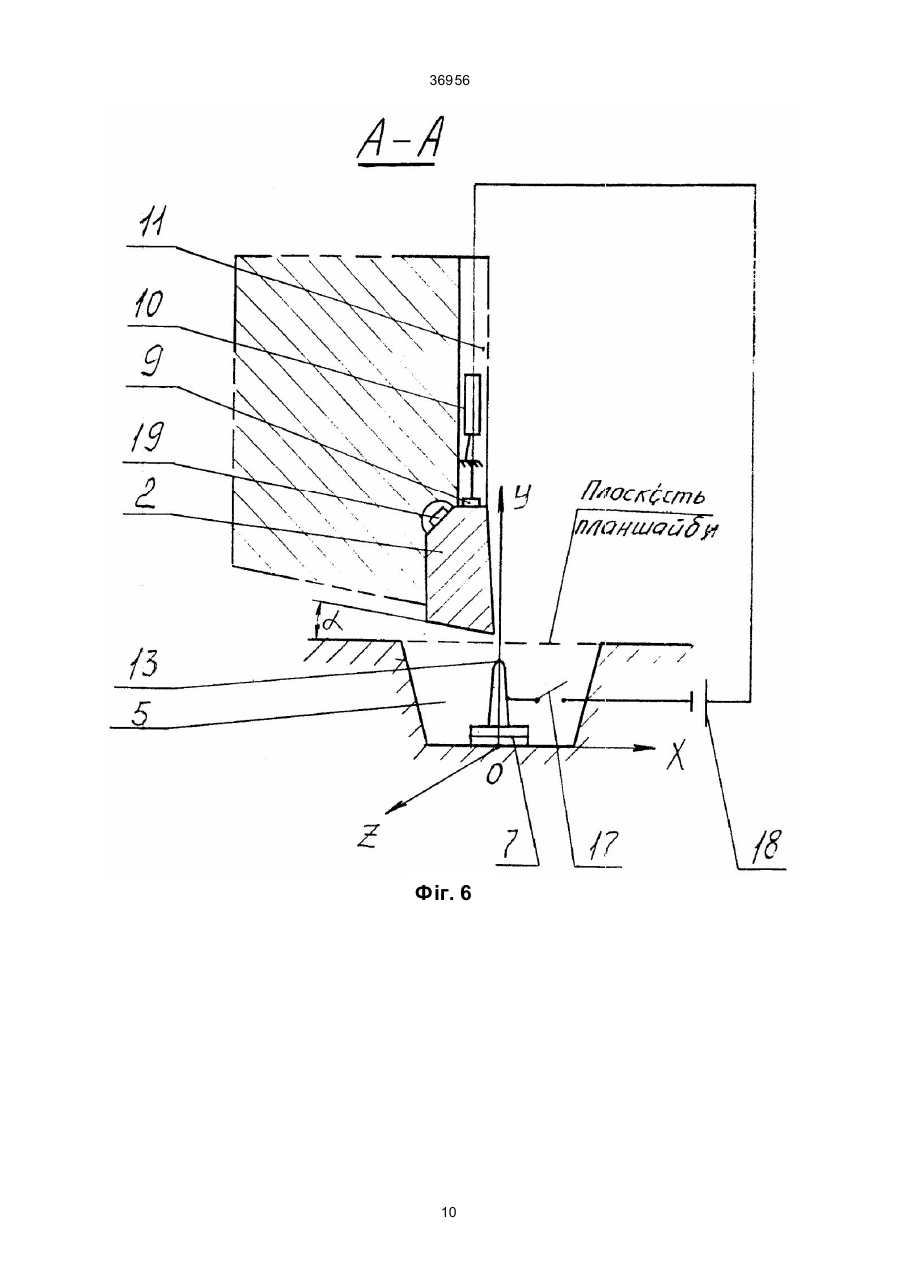
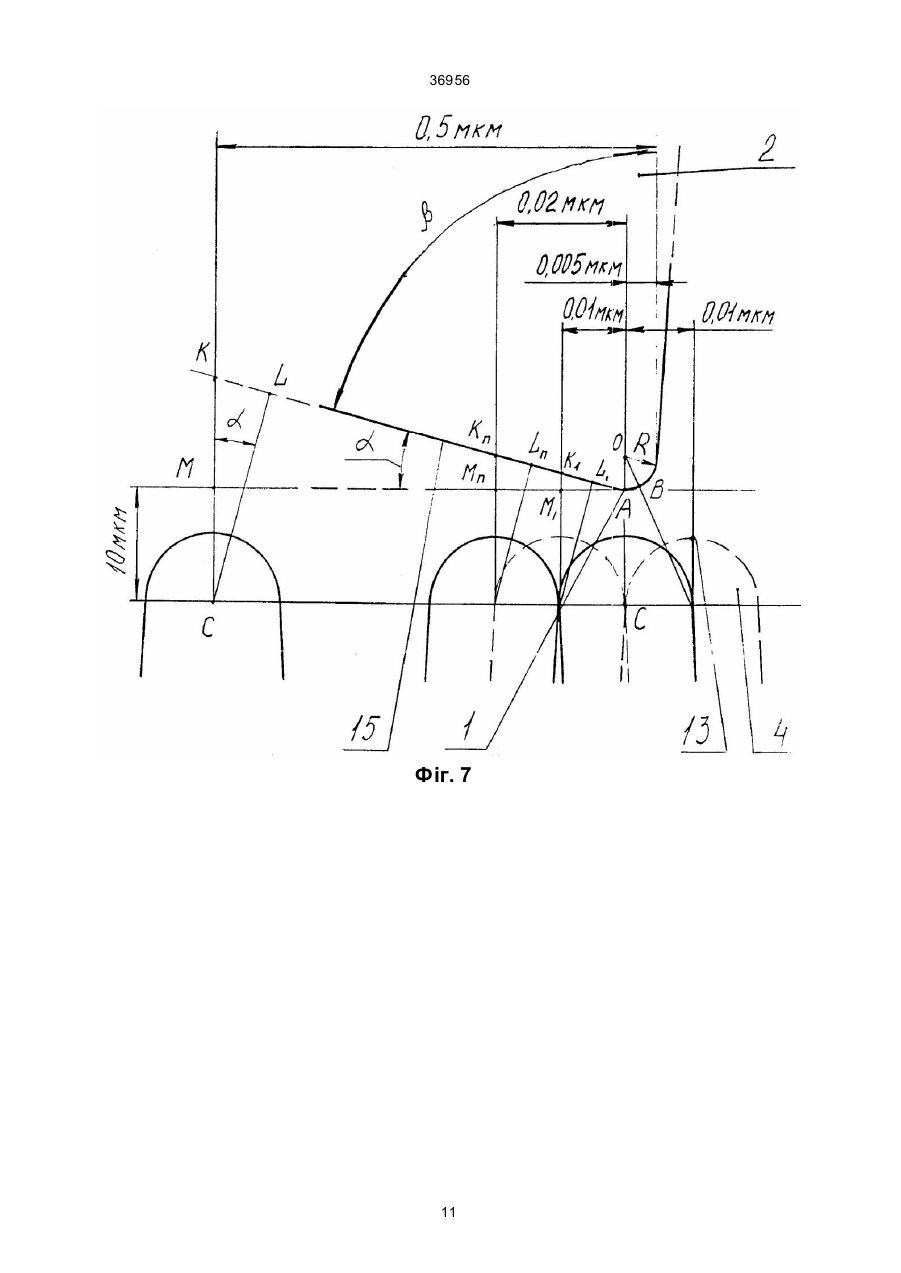
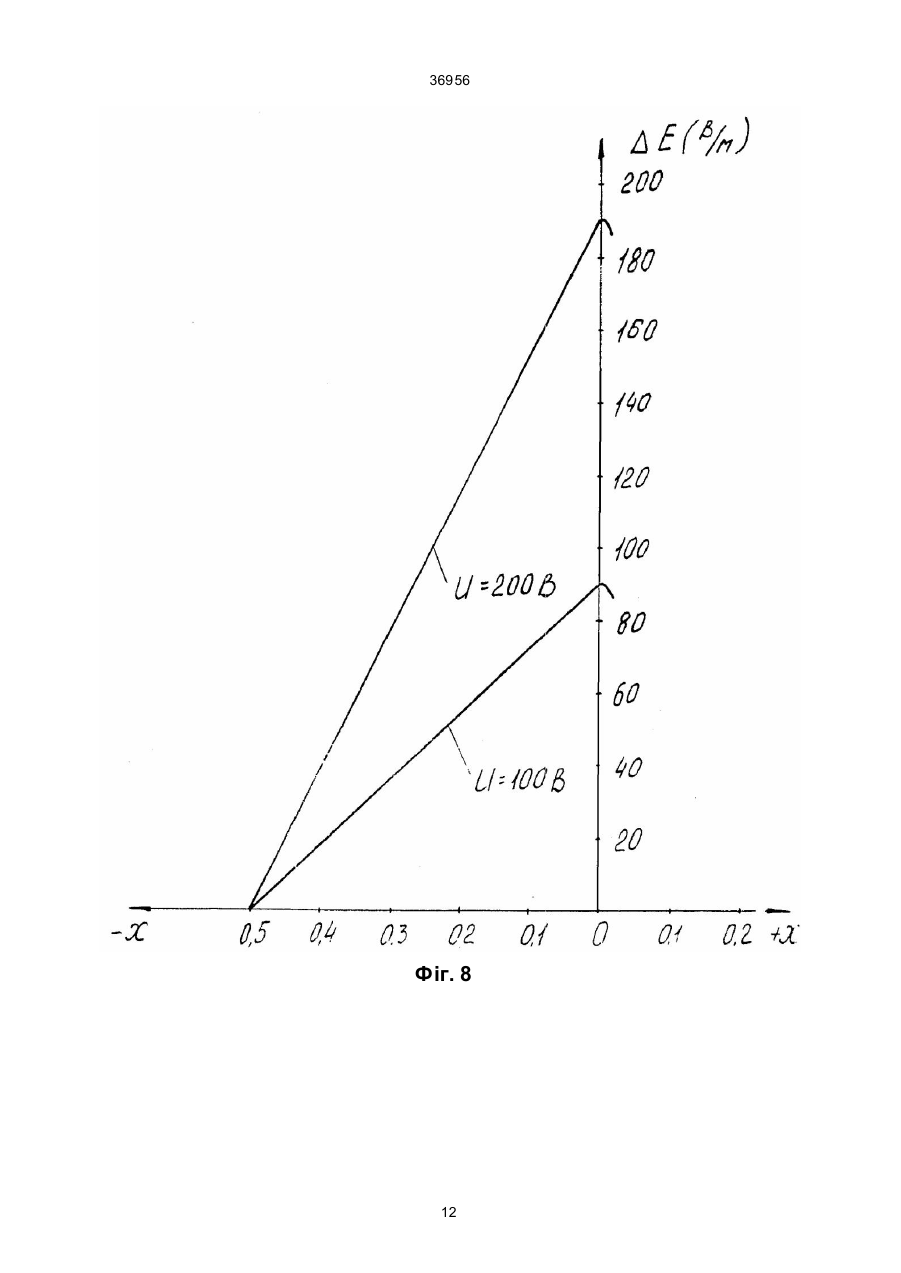
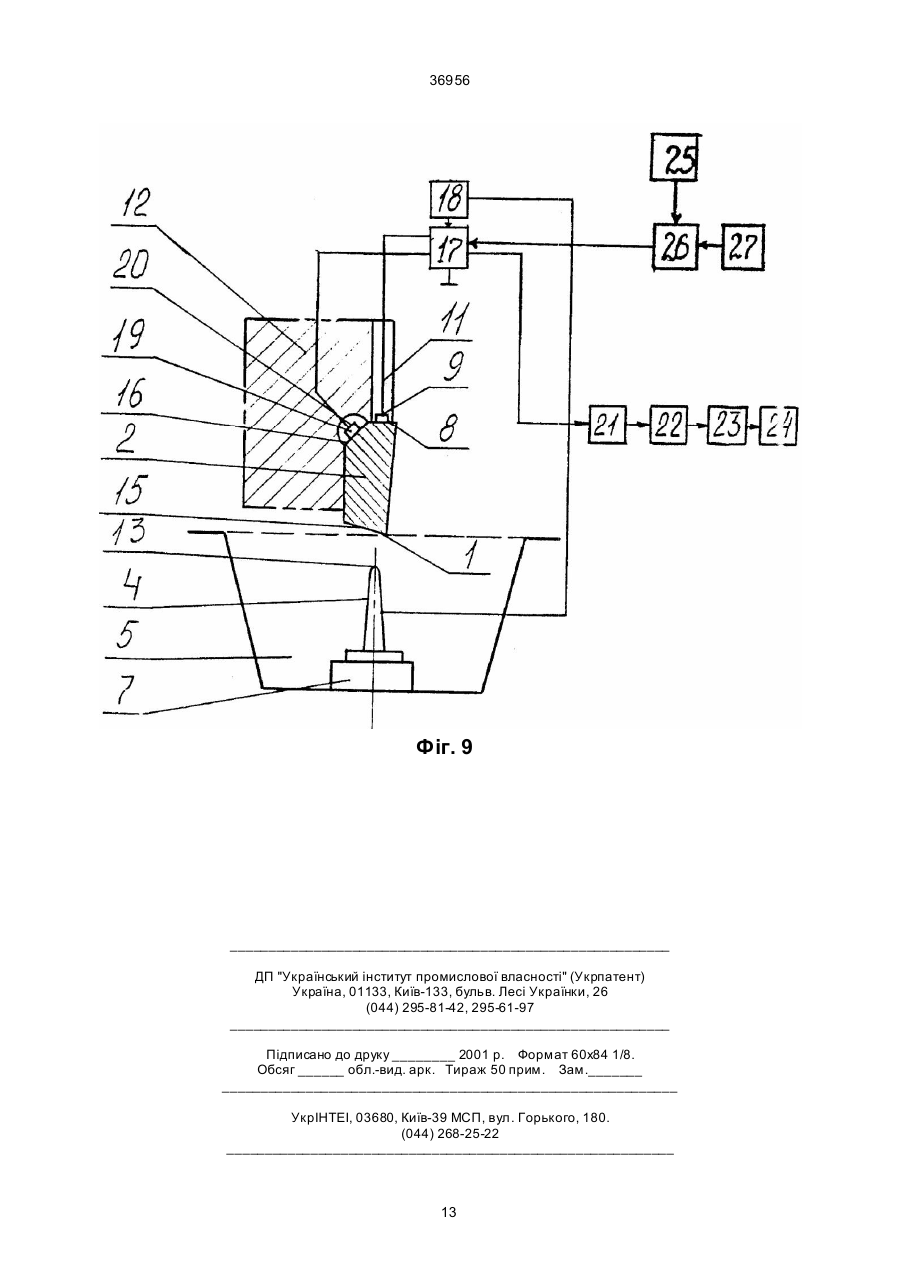
Пристрій суміщeння вершини алмазного різця з віссю обертання вала аеростатичної шпиндельної опори, який містить аеростатичну шпиндельну опору, планшайбу і пристрій переміщення алмазного різця, який відрізняється тим, що додатково містить розташовану у порожнині планшайби голку осі обертання вала аеростатичної шпиндельної опори, встановлену на платформі з можливістю зміщення у дво х взаємоперпендикулярних напрямках, причому, вершина голки осі обертання вала аеростатичної шпиндельної опори суміщена з віссю обертання вала аеростатичної шпиндельної опори, на алмазному різці над його вершиною виконана верхня грань алмазного різця, на яку напилений плоский провідник верхньої грані алмазного різця, у безпосередній близькості від верхньої грані алмазного різця виконана сигнальна грань алмазного різця, на яку напилений плоский провідник сигнальної грані алмазного різця, джерело постійної напруги, реле, схему підсилення мікронапруги, операційний підсилювач, джерело тока Хауленда, індикаторний пристрій, джерело живлення релє, мультивібратор, електронний ключ, причому, перший ви хід джерела постійної напруги з'єднаний з голкою вісі обертання вала аеростатичної шпиндельної опори, а його другий вихід через контакти реле з‘єднаний з плоским провідником верхньої грані алмазного різця плоский провідник сигнальної грані алмазного різця через контакти релє з'єднаний з входом схеми підсилення мікронапруги, а її вихід з'єднаний з входом операційного підсилювача, ви хід операційного підсилювача з'єднаний з джерелом тока Хауленда, а його вихід з'єднаний з індикаторним пристроєм, вихід мультивібратора з'єднаний з першим входом електронного ключа, джерело живлення релє з'єднано з другим входом електронного ключа, вихід електронного ключа з'єднаний з входом реле. Винахід відноситься до верстатобудування і може бути використаний для суміщення вершини алмазного різця з віссю обертання вала аеростатичної шпиндельної опори в процесі підготовки прецизійного верстака до роботи. Найбільш близьким за технічною суттю до винаходу є пристрій суміщення вершини різця з віссю обертання вала шпиндельної опори (див. а.с. СРСР №1324769, М.кл4. В23В 25/06, опубл. 23.07.87р., Бюл. №27), якій містить аеростатичну шпиндельну опору, планшайбу, пристрій переміщення алмазного різця, а також закріплений на планшайбі екран і проектор. Цей пристрій не відрізняється високою точністю тому, що центр перехрестя, з яким суміщується вершина різця і який проектується на екран, має розміри, які перевищують припустиму похибку. Крім того в цій конструкції алмазний різець заломлює світло, завдяки чому його проекція на екран буде зміщена відносно оптичної осі проектора. В основу винаходу поставлено задачу такого вдосконалення пристрою суміщення вершини алмазного різця з віссю обертання вала аеростатичної шпиндельної опори, при якому за рахунок введення у пристрій голки вісі обертання вала аеростатичної шпиндельної опори зміни конструкції різця і створення нового електронного устатк ування забезпечується можливість зменшити похибку при суміщенні вершини алмазного різця з віссю обертання вала аеростатичної шпиндельної опори і, як A ДЕРЖАВНИЙ Д ЕПАРТАМЕНТ ІНТЕЛ ЕКТУАЛЬНОЇ ВЛАСНОСТІ A (13) МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ (13) 36956 (11) (11) UA UA (19) (19) УКРАЇНА 36956 наслідок, підвищити точність суміщення в цілому, крім того процес суміщення відбувається в напівавтоматичному режимі. Рішення цієї задачі досягається тим, що пристрій суміщання вершини алмазного різця з віссю обертання вала аеростатичної шпиндельної опори, який містить аеростатичну шпиндельну опору, планшайбу і пристрій переміщення алмазного різця, згідно винаходу, пристрій додатково включає розташовану у порожнині планшайби голку вісі обертання вала аеростатичної шпиндельної опори, встановлену на платформі з можливістю зміщення у двох взаємноперпендикулярних напрямках, причому, вершина голки вісі обертання вала аеростатичної шпиндельної опори суміщена з віссю обертання вала аеростатичної шпиндельної опори, на алмазному різці над його вершиною виконана верхня грань алмазного різця, на яку напилений плоский провідник верхньої грані алмазного різця, у безпосередній близькості від верхньої грані алмазного різця виконана сигнальна грань алмазного різця, не яку напилений плоский провідник сигнальної грані алмазного різця, джерело постійної напруги, реле, схему підсилення мікронапруги, операційний підсилювач, джерело тока Хауленда, індикаторний пристрій, джерело живлення реле, мультивібратор, електронний ключ, причому, перший вихід джерела постійної напруги з'єднаний з голкою вісі обертання вала аеростатичної шпиндельної опори, а його другий ви хід через контакти реле з'єднаний з плоским провідником верхньої грані алмазного різця, плоский провідник сигнальної грані алмазного різця через контакти реле з'єднаний з входом схемі підсилення мікронапруги, а її ви хід з'єднаний з входом операційною підсилювача, вихід операційного підсилювача з'єднаний з джерелом а Xa уленда, а його вихід з'єднаний з індикаторним пристроєм, вихід мультивібратора з'єднаний з першим входом електронного ключа, джерело живлення реле з'єднаний з другим входом електронного ключа, вихід електронного ключа з'єднаній з входом реле. Причинно-наслідковий зв'язок суттєви х ознак пристрою, що заявляється, з досягаємими технічними результатами полягає у наступному. На Фіг. 1 представлена схема прецизійного верстата алмазного мікроточіння. Формоутворюючу систему цього верстата утворюють наступні елементи. Станина 37, у якості якої використовується гранитна плита. Станина встановлюється на віброкомпенсуючі опори 38, які гасять коливання Земної поверхні. На двох стойках 36, встановлених на станині, лежить аеростатична напрямна, яка включає основу 33 і рухомий елемент 32. Рухомий елемент 32 переміщується кроковим п‘єзоелектричним двигуном 31 з регульованим кроком переміщення, який включає штовхач 28 прямого хода, штовхач 29 зворотного хода, пристрій 30 управління переміщенням (а.с. СРСР "П‘єзоелектричний двигун", №1676417, від 08.12.1991р.) До нижньої основи рухомого елемента 32 прикріплюється пристрій 4 поперечного переміщення різця, у якості якого використовується диференційний гвинт. До пристрою 34 прикріпляється пристрій 35 вертикального переміщення різця. Отже забезпечується переміщення алмазного різця по ям тривимірної системи координат ОХУZ. Названі пристрої у загальному випадку утворюють пристрій переміщення алмазного різця. В порожнині 5 планшайби 6 встановлена голка 4 вісі обертання вала аеростатичної шпиндельної опори. Діаметр верхньої полусфери голки не перевищує 0.02 мкм (Шермегор Т., Новолин В. "Новые професии тунельного микроскопа", "Наука и жизнь", №11, 1990г.). Причому, вершина голки осі обертання суміщена з віссю обертання вала шпиндельної опори. Нехай у плоскості перерізу по А-А (Фіг.2,3) алмазного різця 2 і тримачки 12, яка проходить через вершину 1 різця 2 у тримачці 12 виконаний прямокутний паз II. У пазу II на верхню грань 8 різця напилений плоский провідник 9 (Фіг. 4), який разом з вершиною 13 голки 4 утворює конденсатор 14, еквівалентна схема якого приведена на Фіг. 5, а діелектриком цього конденсатора 14 служить кристал алмазного різця 2. При підключенні джерела 18 постійної напруги (Фіг.6) до плоского провідника 9 і до голки 4,голка 4 і плоский провідник 9 заряджаються позитивно і негативно, відповідно. Заряди, що з'являються на голлці 4 і плоскому провіднику 9 завжди рівні по величині, але мають протилежні знаки (Калашников С.Г. "Электричество", М., Наука, 1970г.) Заряджаються лише зовнішні поверхні цих елементів. Платність s наряда залежить від кривизни поверхні, причому заряди концентруються на вістрях, якщо вони є на поверхнях (див. там же). Тому максимальна кількість зарядів розташується на вершині голки 4 осі обертання. У безпосередній близькості від вершини 13 голки 4 виникає електричне поле великої напруги E=q/r2 (1) де q - величина заряда на вершині 13 голки 4. На кристалі алмаза різця 2 виконують сигнальну грань 16. Сигналmна .грань 16 служить для з‘йома сигнала, пропорційного величині поверхневого заряда, який індуцірується на цій поверхні електричним полем конденсатора 14, утвореного плоским провідником 9 і вершиною 13 голки 4 осі обертання вала. Для з‘йома сигнала з сигнальної грані на неї напиляється плоский провідник 19 (Фіг. 4). Сигнал, пропорційний величині поверхневого заряда, індуцированого електричним полем конденсатора 14 на сигнальній грані 16 різця 2 знімають з зовнішньої плоскості 20 плоского провідника 19. Нехай рухомий елемент 32 напрямної встановлений так, що вісь симетрії голки 4 лежить у площині перерізу тримачки 12 по А-А, яка проходить через вершину 1 різця 2. Крім того, нехай різець 2 зміщений так, що вершина різця знаходиться перед голкою 4 (Фіг. 6). Радіус загострення ріжучої крайки різця 2R=0.005 мкм. Як вгадувалося раніше, діаметр напівсфери на вершині голки 4 дорівнює 0.02 мкм. Вершина 1 різця 2 буде з високою точністю суміщена з віссю обертання вала, якщо в результаті суміщання вершина 1 не вийде за межі напівсфери голки 4. Погрішність суміщення при цьому не перевищить 0.01 мкм. 2 36956 Ітак, підключим плоский провідник 9 і голку 4 до джерела 18 постійної напруги, на клемах якого різність потенціалів: V=vс-Va, (2) де Vс - потенціал вершини голки 4 вісі обертання вала: Va - потенціал плоского провідника 9. В результаті конденсатор 14, утворений плоским провідником 9 і голкою 4 вісі обертання заряджається і в ньому виникає електричне поле. Причому, напруженість електричного поля максимальна у безпосередній близькості від вершини 13 голки 4 і рівна плотності заряда на її поверхні (Калашніков С.Г. "Электричество", М., Наука, 1970г.): E=s/e0 , (3) де s - поверхнева плотність зарядів на вершині 13 голки 4. Із цього витікає, що навіть при малих змінах відстані від вершини 13 голки 4 оci обертання (Фіг. 7) до нижньої герані 15 різця 2 напруженнicть електричного поля на нижній грані 15 суттєво змінюється. Під дією електричного поля конденсатора 14, еквівалентна схема якого представлена на Фіг. 5, відбувається поляризація алмазного різця 2. У тому випадку, якщо до голки 4 осі обертання підключена негативна і лема джерела постійної напруги, а до плоского провідника 9 - позитивна, на верхній грані 8 і сигнальній грані 16 різця виникають негативні заряди поверхневої поляризації (Фіг. 5), а на нижній грані 15 - позитивні заряди поверхневої поляризації. Розглянемо як буде змінюватися поверхнева плотність зарядів поляризації на сигнальній грані 16 різця 2 при його переміщенні над голкою 4. Для оцінки зміни плотності заряда на сигнальній грані 16 необхідно попередньо розрахувати величину заряда на вершині 13 голки 4. Ітак, різниця потенціалів між плоским провідником 9 і вершиною 13 голки 4 дорівнює V. Оскільки напрямок силової лінії електричного поля співпадає з напрямком напруженості електричного поля, то величина напруженості поля дорівнює падінню напруги на одиницю довжини силової лінії. Тому завжди можно визначити напруженість поля, вимірюючи напругу V між двома провідниками. У даному випадку стоїть задача визначення величини заряда на вершині голки 4, яка визначається різницею потенціалів V на клемах джерела 18 постійної напруги і не залижіть від того, якого рода електричне поле виникає у просторі між плоским провідником 9 і голкою 4. Нехай вершина 13 голки 4 має форму напівсфери з радіусом "а". Крім того, відстань "r" між плоским провідником 9 і вершиною 13 голки 4r»a. У цьому випадку можно нехтува ти індукційним впливом плоского провідника 9 і вершини 13 друг на друга і вважати, що заряди на напівсфер і розподіляються рівномірно (Калашников С.Г. "Электричество", М. Наука, 1970г., стр.145). Якщо заряд на напівсфери дорівнює - q, то її потенціал відносно нескінченості виражається співвідношенням 1 q, (4) V¥ = 2pee 0 a де V∞ - потенціал клеми джерела постійної напруги. Із (4) величина заряда "q" на напівсфері голки 4 дорівнює: (5) q = 2 pee 0 aV¥ , Нехай різець 2 встановлений над голкою 4 так, що вісь симетрії голки 4 лежить у площині, яка перерізає різець по А-А (Фіг. 3) і горизонтально переміщується у цій площині у напрямку напівмасі ОХ (Фіг. 7). Прийому, центр напівсфери вершини 13 (точка "С" на Фіг. 7) знаходиться на відстані CM від відрізка прямої AM, по якій переміщується вершина 1 різня 2 (точка А на Фіг. 7). Кут L AM нахилу задньої грані алмазного різця 2 дорівнює . Перед початком переміщення різця 2 вершина 13 голки 4 знаходиться по горизонталі від вершини 1 різця 2 (точка А), наприклад, на .відстані 0.5 мкм. Нагадаємо, що діаметр напівсфери вершини голки 4 dг=0.02 мкм. Тоді напруженність електричного поля на задній грані 15 різця 2 у точці L, найближчої до вершини голки 4 перед початком переміщення різця 2 розраховується по формулі (Калашников С.Г. "электричество", М., Наука, 1970г., стр. 145): EL = 1 q , 2pee 0 (LC)2 (6) Із геометричних побудов, наведених на Фіг. 7, визначається відстань від центра "С" напівсфери вершини 13 до найближчої точки на задній грані 15 алмазного різця 2 (точка L): KM=0,5 мкм×tga (7) KC=10 мкм+0,5 мкм×tga Причому, ÐMAK=a і дорівнює ÐLCK, як кути з взаємно перпендикулярними сторонами. Тоді із DKCL визначається LC: LC=KC-cosa=(10 мкм+0,5 мкм×tga)×cosa (9) При дискретному переміщенні алмазного різця уліво з кроком 0.02 мкм напруженість електричного поля на задній грані різця у точках L n , найближчих до вершини голки 4 розраховується у відповідності з співвідношенням: E Ln = 1 q , × 2pee 0 (Ln C )2 (10) де LnC=[10 мкм+(0,5-0,02×n)×tga]×cosa. Як відмічалося раніше, для суміщення вершини 1 різця 2 з віссю обертання вала шпиндельної опори, вершину 1 (точка А, Фіг. 7) відносно вершини 13 голки 4 достатньо зміщувати на відстань, наприклад, у 20-30 разів більше діаметра dг=0.02 мкм. Це значить, що контрольована величина зміщення різця складає 0.5 мкм. При такій величині зміщення зміною відстані між плоским провідником 9 і вершиною 13 голки можно нехтувати. Тому вершина 13 і плоский провідник 9 у еквівалентній схемі вважаються нерухомими. Тоді рухомим елементом у еквівалентній схемі вважається алмазний різець (кристал алмаза). Причому, точки задньої грані 15 різця в силу близкості до вершини 13 лежать в області сильного електричної о поля. Отже навіть незначна зміна відстані між точкою на задній гран: 15 і вершиною 13 голки призводить до значної зміни напруженості електричного поля у цій точці. На Фіг. 8 наведена залежність збільшення напруженості електричного поля на задній грані 15 3 36956 різця в [B/M], створеного зарядами на вершині 13 при потенціалі голки 4 V=100 В і V=200 В відносно потенціалу Землі для відстаней, наведених на Фіг.7. Як видно із наведених на Фіг. 8 залежностей вона лінійна. Її крутизна визначається напругою на клемах джерела 18 постійної напруги. Зміщення різця на 0.01 мкм викликає значне підвищення напруженості поля у точках на задній грані 15 різця (Фіг. 7) Відомо (Кашин Н.Б. "Курс физики", т.2, М., Высшая школа, 1962г , стр. 67), що на кордоні двох діелектриків (у данному випадку на кордоні між повітрям і заднею гранью 15 різця) співвідношення між нормальною складовою зовнішнього поля Еn1, створеного зарядами вершини 13 голки 4 і нормальною складовою поля поляризації En1, що виникає у діелектрику, має вигляд: e1Еn1=e2E n2, (11) де e1 – діелектична проникність повітря (e1=1) e2 – діелектична проникність алмаза (e2=16) Звідти e1E n1 , (12) E n2 = e2 По мірі наближення задньої грані 15 різця до вершини голки 4 En1 зростає. Отже зростає і En2. Зріст напруженості поля поляризації обумовлений зростанням поверхневої густини зарядів поляризації на нижній грані алмазного різця. Отже зростає поверхнева густина заряда поляризації на сигнальній грані 16 алмазного різця. Як показано на Фіг. 7 при горизонтальному переміщенні різця над голкою 4 вісі обертання вала аеростатичної шпиндельної опори 3, найближчою точкою різця до вершини 13 голки 4 являється вершина 1 різця 2 (точка "А"). Тому положение різця, коли в процесі переміщення його вершина знаходиться над вершиною 13 голки, відповідає максимальній плотності s зарядів поляризації на сигнальній грані 16 алмазного різця. Звідси витікає, що вершина І алмазного різця суміщена з віссю обертання вала аеростатичної шпиндельної опори, якщо на сигнальній грані 16 буде максимальна поверхнева плотність зарядів поляризації. При цьому погрішність суміщення не перевищує 0.01 мкм. Винахід пояснюється кресленнями. Фіг. 1 - верстат алмазного мікроточіння (загальний вигляд). Фіг. 2 - алмазний різець з тримачкою. Фіг. 3 - алмазний різець з тримачкою і голкою у плані. Фіг. 4 - алмазний різець з сигнальною гранью і плоским провідником. Фіг. 5 - еквівалентна електрична схема конденсатора "голка вісі обертання вала - алмазний різець- плоский провідник". Фіг. 6 - переріз Фіг. 3 по А-А. Фіг. 7 - положения вершини алмазного різця відносно вершини голки осі обертання вала аеростатичної шпіндельної опори у процесі суміщання з віссю обертання. Фіг. 8 - залежність величини поверхневої плотності зарядів поляризації на сигнальній грані алмазного різця від відстані між вершиною різця і вершиною :сі обертання вала. Фіг. 9 - пристрій суміщення вершини алмазного різця з віссю обертання вала аеростатичної шпиндельної опори (без елементів верстата). Пристрій напівавтоматичного суміщання вершини 1 алмазного різця 2 з віссю обертання вала аеростатичної шпиндельної опори 3 включає голку 4 осі обертання вала аеростатичної шпиндельної опори 3, яка встановлена у порожнині 5 планшайби 6 на платформі 7 (Фіг.9). Платформа 7 забезпечує переміщення голки 4 у площині, яка паралельна площині планшайби 6. На кристалі алмазного різця 2 виконана верхня грань 8, на яку напилений плоский провідник 9 верхньої грані алмазного різця 2. Плоский провідник 9 має екранірованний вивід 10, який розміщений у прямокутному пазу II, виконаному у тримачці 12. Причому, плоский провідник 9 і вершина 13 голки 4 утворюють конденсатор 14 (Фіг. 5) електриком якого являється алмазний різець 2. Напруженість електричного поля конденсатора 14 визначається взаємним розміщенням точок нижньої грані 15 алмазного різця 2 і вершини 13 голки 4 (вершина І алмазного різця 2 належить до нижньої грані 15. Електричне поле конденсатора 14 індуцірує поверхневі заряди полярізації на сигнальній грані 16 алмазного різця 2 (Фіг.5). Так як напруженість електричного поля конденсатора 14 визначається взаємним розташуванням вершини І алмазного різця 2 і вершини 13 голки 4, величина поверхневого заряда поляризації на сигнальній грані 16 також визначається взаємним розташуванням цих елементів і де сягає максимального значення, коли вершина алмазного різця 2 буде розташована над вершиною 13 голки 4. Для заряда конденсатора 14 і створення електричного поля контактами реле 17 плоский провідник 9 і голка 4 періодично підключаються де джерела 18 постійної напруги. Джерело 18 постійної напруги включає випрямляч і стабілізатор напруги, принципова схема якого наведена у книжці (Хоровец П., Хилл У. "Искуство схемотехники", т.І, М., Мир). На сигнальну грань 16 (Фіг. 4) напилюють плоский провідник 19 сигнальної грані. Під дією зовнішнього електричного поля, яке створюється зарядами, сконцентрованими на вершині 13 голки 4 і зарядами плоского провідника 9, виникають заряди поляризації на сигнальній грані 16, які у свою чергу викликаєть поляризацію плоского провідника 19 через вплив (Кашин Н.В. "Курс физики", т.2, М., Высшая школа, стр. 81). Причому, голку 4 підключають до негативної клеми джерела постійної напруги, а плоский провідник 9 - до позитивної клеми джерела 18. Верхня плоскість 20 плоского провідника 19 заряджається негативно. Потенціал верхньої плоскості 20 плоского провідника19, який вимірюється відносно потенціала Землі, через контакти реле 17 періодично прикладається до входу схеми 21 підсилення мікронапруги і закорочується на Землю. Отже реле 17 служить для сінхронного підключення джерела 13 д плоского провідника 9 верхньої грані 8 і верхньої плоскості 20 плоского провідника 19 сигнальної грані 16 до входу схеми 21 підсилення мікронапруги, а також відключення джерела 18 від плоского 4 36956 провідника з одночасним підключенням плоского провідника 19 до Землі. Необхідність такого перемикання пояснюється тим, що із-за стікання зарядів через опір витоку ізоляції і попадання заряджених часток ва кристал алмаза із повітря, заряди поляризації алмазного різця 2 постійно нейтралізується. Тому потенціал верхньої плоскоті 20 знижується і пристрій може згубити чутливість. Для відновлення потенціала верхньої плоскості 20 контактами релє 17 періодично відключають джерело 18 постійної напруги від голки 4 і плоского провідника 9, а плоский провідник 19 підключавсь до Землі. В результаті заряди поляризації на граням алмазного різця 2 зникають, а нейтралізуючі заряди стікають на Землю. Схема 2I підсилення мікронапруги, яка знімається з верхньої плоскості 20 плоского провідника 19, це схема щупа для підсилення напруги нервового кінця клітини, який використовується в біології (Хорошей Н., Хилл У. ""Искусство схемотехники". т.2, М. Мир, стр. 358–359). ' цій схемі вихідний опір електродів, як джерел сигнала, складає 100 МоМ і вище. У данному випадку вихідний опір плоского провідника 19, як джерела напруги, відносно Землі також складає сотні МоМ. Ця схема задовольняє усім вимогам до підсилювача малих напруг, тобто має високий вхідній імпеданс, малий вхідний шум, також нечутлива до синфазних сигналів. Підсилений по потужності сигнал з вихода схеми 21 надходить на }хід операційного підсилювача 22 (Хоровиц П., Хил У. "Искусство схемотожики" T.I, М., Мир 1984г., стр.159). 3 ви хода операційного підсилювача 2.! сигнал надходить на вхід джерела 23 тока Хауленда, ток навантаження якого І=-Uвх/R тобто пропорційний вхідній напрузі (Хоровец П., Хилл У. "Искусство схемотехники", М., Мир, т.1, стр.162). У якості навантаження джерела 23 тока Хауленда використовують індикаторний пристрій 24, у якості якого може використовува тися, наприклад, міліамперметр, показання якого пропорційні величині зарядів поляризації на сигнальній грані 16 різця 2 і досягають максимального значення при суміщенні вершини 1 алмазного різця 2 з вершиною 13 голки 4. Живлення релє 17 здійснюється від джерела 25 живлення релє через електронний ключ 26. Електронним ключем керує мультивібратор 27. Накресленнях також показані: 28 - штовхач прямого хода: 29 - штовхач зворотного хода: 30- пристрій керування штовхачами. 28, 29, 30 утворюють п'єзоелектричний двигун 31. П‘єзоелектичний двигун 31 забезпечує дискретне з рагульованим кроком переміщення рухомого елемента 32 аеростатичної напрямної по її основі 33 (по оci "X", Фіг. 6). Переміщення різця по осі "Z" здійснюється за допомогою пристрою 34 поперечного зміщення з диференціальним гвинтом. Пристрій 35 вертикального переміщення служить для переміщення алмазного різця 2по вісі “У” (Фіг. 6) і, отже для установки зазора між вершиною 1 різця 2 і вершино. 13 голки 4. На Фіг. 1 також показані станина 36, віброкомпенсуючі опори 3, стойки 38. Елементи 28-38 утворюють пристрій переміщення алмазного різця 2. Причому, перший вихід джерела 18 постійної напруги з'єднаний з голкою 4 вісі обертання вала аеростатичної шпиндельної опори, а його другий вихід через контакти реле 17 з'єднаний з плоским провідником 9, верхня плоскість 20 плоского провідника 19 через контакти релє 17 з'єднана з входом схеми 21 підсилення мікронапруги, а її ви хід з'єднаний з входом операційного підсилювача 22, а його вихід з'єднаний з входом джерела 23 тока Ха уленда, вихід джерела тока Хауленда з'єднаний з індикаторним пристроєм 24, вихід мультивібратора 23 з'єднаний з першим входом електронного ключа 26, джерело 25 живлення реле 17 з'єднано з другим входом електронного ключа 26, вихід електронного ключа 26 з'єднаний з релє 17. Роботу пристрою напівавтоматичного суміщання вершини І алмазного різця 2 з віссю обертання вала аеростатичної шпіндельної опори 3 модно розділити на три незалежних етапи. На першому етапі за допомогою п'єзоелектричного двигуна 31, пристрою 34 поперечного переміщення різця 2 і пристрою 35 вертикального переміщення різця 2 у процесі точіння плоскої поверхні по способу прототипа суміщують вершину 1 різця 2 з віссю обертання вала аеростатичної шпиндельної опори 3. Зафіксовують вершину 1 різця 2 на осі обертання, дли чого зафіксовують положення рухомого елемента 32 на основі 33 штовхачем 28 або штовхачем 29. На другому етапі суміщують вершину 13 голки 4 з вершиною 1 різця 2. Для цього за допомогою пристрою 35 вертикального переміщення різця 2 переміщують різець 2 по осі "У" і суміщують її з плоскістю планшайби 6, а також за допомогою платформи 7 встановлюють вершину 13 голки 4 гід одним з кінців ріжучої крайки алмазного різця 2. Включають пристрій. Гід дією зовнішнього електричного поля на сигнальній грані 16 різця 2 виникають заряди поляризації. Під дією електричного поля, яке створюється згаданими зарядами поляризації, відбувається поляризація через вплив плоского провідника 19. Потенціал верхньої плоскості 20 плоского провідника 19 прикладається до входу схеми 21 підсилення мікронапруги (Фіг. 9). З вихода схеми 21 підсилений по потужності сигнал надходить на вхід операційного підсилювача 22, а з його вихода на вхід джерела 23 ток і Хауленда струм джерела тока 23 Хауленда протікає крізь індикаторний пристрій 24. Переміщують голку 4 за допомогою платформи 7 по осі "X" і по максимуму показання індикаторного пристрою встановлюють вершину 13 голки 4 під ріжучу крайку різця 2. Переміщують вершину 13 уздовж ріжучої крайки різця 2 і по максимуму показання індикаторного пристрою 24 суміщають вершину 13 голки 4 осі обертання вала з вершиною 1 алмазного різ 2, а отже, і з віссю обертання вала аеростатичної шпиндельної опори 3. Зафіксовують голку 4 на весь період часу експлуатації цієї аеростатачної шпиндельної опори 3. Третій етап роботи пристрою полягає у суміщанні вершини 1 алмазного різця 2 з віссю обертання вала аеростатичної шпиндельної опори 3 шляхом суміщання вершини 1 різця 2 з вершиною 5 36956 13 голки 4 осі обертання вала. Це суміщання виконується при кожній зміні різця або перед проходом оброблювальної поверхні. Для цього, як і на другому етапі роботи, за допомогою пристрою 35 вертикального переміщення різця 2 переміщують різець 2 по осі "У" і суміщують вершину 1 з плоскістю планшайби 6. За допомог п'єзоелектричного двигуна 31 і пристрою 34 встановлюють один із кінців ріжучої крайки різця 2 над вершиною 13 голки 4. Вмикають пристрій. Потенціал верхньої плоскості 20 плоского провідника 19 періодично періодично через контакти реле 17 прикладається до входу схеми 21 підсилення мікронапруги. З вихода схеми 21 підсилений по потужності сигнал надходить на вхід операційного підсилювача 22, а з його вихода надходить на вхід джерела тока Хауленда. Струм джерела 23 cтруму Ха уленда протікає через індикаторний пристрій 24. Його величина пропорційна величині вхідного сигнала джерела 23 струму Ха уленда. Переміщають алмазний різець 2 за допомогою п'єзоелектричного двигуна 31 по осі "X" і за максимальним показанням індикаторного пристрою встановлюють ріжучу крайку різця 2 над вершиною 13 голки 4. Переміщають ріжучу крайку над вершиною ІЗ голки 4 і за максимальним показанням індикаторного пристрою 24 суміщають вершину 1 різця 2 з вершиною 31 голки 4 осі обертання вала, а, отже, і з віссю обертання вала аеростатичної шпиндельної опори з погрішністю, що може не перевищувати 0.01 мкм. Фіг. 1 6 36956 Фіг. 2 7 36956 Фіг. 3 8 36956 Фіг. 4 Фіг. 5 9 36956 Фіг. 6 10 36956 Фіг. 7 11 36956 Фіг. 8 12 36956 Фіг. 9 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 13
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for alignment of diamond tool point with rotation axis of shaft of aerostatic spindle bearing
Автори англійськоюShepeliev Anatolii Oleksandrovych, Zinenko Volodymyr Mykolaiovych
Назва патенту російськоюУстройство совмещения вершины алмазного резца с осью вращения вала аэростатической шпиндельной опоры
Автори російськоюШепелев Анатолий Александрович, Зиненко Владимир Николаевич
МПК / Мітки
МПК: B23B 25/00
Мітки: алмазного, обертання, суміщення, шпиндельної, вершини, опори, віссю, пристрій, різця, аеростатичної, вала
Код посилання
<a href="https://ua.patents.su/13-36956-pristrijj-sumishhennya-vershini-almaznogo-rizcya-z-vissyu-obertannya-vala-aerostatichno-shpindelno-opori.html" target="_blank" rel="follow" title="База патентів України">Пристрій суміщення вершини алмазного різця з віссю обертання вала аеростатичної шпиндельної опори</a>
Пристрій компенсації гіроскопічного моменту обертового елемента, наприклад, вала аеростатичної шпиндельної опори
Номер патенту: 25540
Опубліковано: 30.10.1998
Автори: Зіненко Володимир Миколайович, Шепелев Анатолій Олександрович
МПК: F16C 32/06
Мітки: опори, вала, обертового, пристрій, моменту, шпиндельної, аеростатичної, гіроскопічного, компенсації, елемента, наприклад
Формула / Реферат:
1. Устройство компенсации гироскопического момента вращающегося элемента, например, вала аэростатической шпиндельной опоры, содержащее датчики величины смещения оси вращающегося элемента по оси "X" и по оси "Y", измерители величины смещения оси вращения вращающегося элемента по оси "X" и по оси "Y", объединенные в группы по меньшей мере из двух, регуляторы давления, образующие компенсаторы смещения оси...
Пристрій суміщення нижньої точки шліфувального круга з дугоподібною шліфувальною поверхнею з віссю обертання вала шпиндельного вузла
Номер патенту: 20907
Опубліковано: 07.10.1997
Автори: Зіненко Володимир Миколайович, Шепелев Анатолій Олександрович
МПК: B23Q 17/00
Мітки: вала, поверхнею, дугоподібною, віссю, нижньої, обертання, шліфувального, суміщення, шпиндельного, точки, шліфувальною, пристрій, круга, вузла
Формула / Реферат:
1. Устройство совмещения нижней точки шлифовального круга с дугообразной шлифующей поверхностью с осью вращения вала шпиндельного узла, содержащее устройство перемещения шлифовального круга и индикаторное устройство, отличающееся тем, что оно снабжено связанной с пьезоэлементом подвижной пластиной с закрепленной в центре ее верхней плоскости индикаторной иглой, кроме того устройство включает также блок коммутации и усилитель, причем...
Пристрій компенсації радіальних навантажень на вал радіальної аеростатичної опори
Номер патенту: 25727
Опубліковано: 30.10.1998
Автори: Зіненко Володимир Миколайович, Шепелев Анатолій Олександрович
МПК: B23B 19/00, F16C 32/06
Мітки: радіальної, пристрій, опори, аеростатичної, радіальних, компенсації, навантажень, вал
Формула / Реферат:
Устройство компенсации радиальных нагрузок на вал радиальной аэростатической опоры, включающее электрически связанные между собой датчики величин зазоров, измерители величин зазоров, дифференциальные усилители сигналов рассогласования, регуляторы давления, отличающееся тем, что оно снабжено компенсаторами радиального смещения оси вращения вала радиальной аэростатической опоры, расположенными по внешним сторонам системы питающих сопел...
Пристрій стабілізації положення рухомого елемента плоскої аеростатичної опори
Номер патенту: 17152
Опубліковано: 18.03.1997
Автори: Шепелев Анатолій Олександрович, Зіненко Володимир Миколайович
МПК: F16C 32/06
Мітки: положення, рухомого, плоскої, аеростатичної, пристрій, опори, елемента, стабілізації
Формула / Реферат:
Устройство стабилизации положения подвижного элемента плоской аэростатической опоры, включающей подвижный и неподвижный элементы плоской аэростатической опоры и регуляторы положения подвижного элемента плоской аэростатической опоры, отличающееся тем, что неподвижный элемент плоской аэростатической опоры состоит из двух оснований со встроенными в них жиклерами подачи газа в зазоре между этими основаниями и размещенным между ними подвиж-ным...
Пристрій управління частотою обертання колінчастого вала двигуна внутрішнього згоряння

Номер патенту: 23917
Опубліковано: 31.08.1998
Автори: Щербіна Андрій Григорович, Солоха Олег Олексійович, Зотов Олександр Олександрович, Білогуб Олександр Віталійович
Мітки: пристрій, згоряння, управління, внутрішнього, колінчастого, обертання, двигуна, частотою, вала
Формула / Реферат:
Пристрій управління частотою обертання колінчастого вала двигуна внутрішнього згоряння, що містить кроковий електродвигун, кінематично зв'язаний гвинтовим виконавчим механізмом з підпружиненою рейкою паливного насоса, та механізм аварійного відключення подачі палива, який відрізняється тим, що гвинтовий виконавчий механізм виконаний у вигляді барабана, який насаджений на вал електродвигуна, з гвинтовою канавкою, створеною на його зовнішній...