Космічний маніпулятор
Номер патенту: 734
Опубліковано: 15.03.2001
Автори: Бойченко Тамара Михайлівна, Пуриш Валентин Захарович
Формула / Реферат
Космічний маніпулятор, що складається із опорного каркаса , побудованого із шарнірних слідкуючих приводів з мікропроцесорним керуванням у м'якому гідроскафандрі, навішаної портативної пневмостанції, центрального комп'ютера програмного керування, систем гіростабілізації та супервізорного керування по кабельному каналу, який відрізняється тим, що його опорний каркас побудовано із шарнірних слідкуючих пневмоприводів, система гіростабілізації доповнена двома форсунками, які встановлені на ногах, а суперві-зорна система керування оснащена радіоканалом, м'який скафандр оснащено розгалуженою системою тактильних датчиків і системою пожежогасіння.
Текст
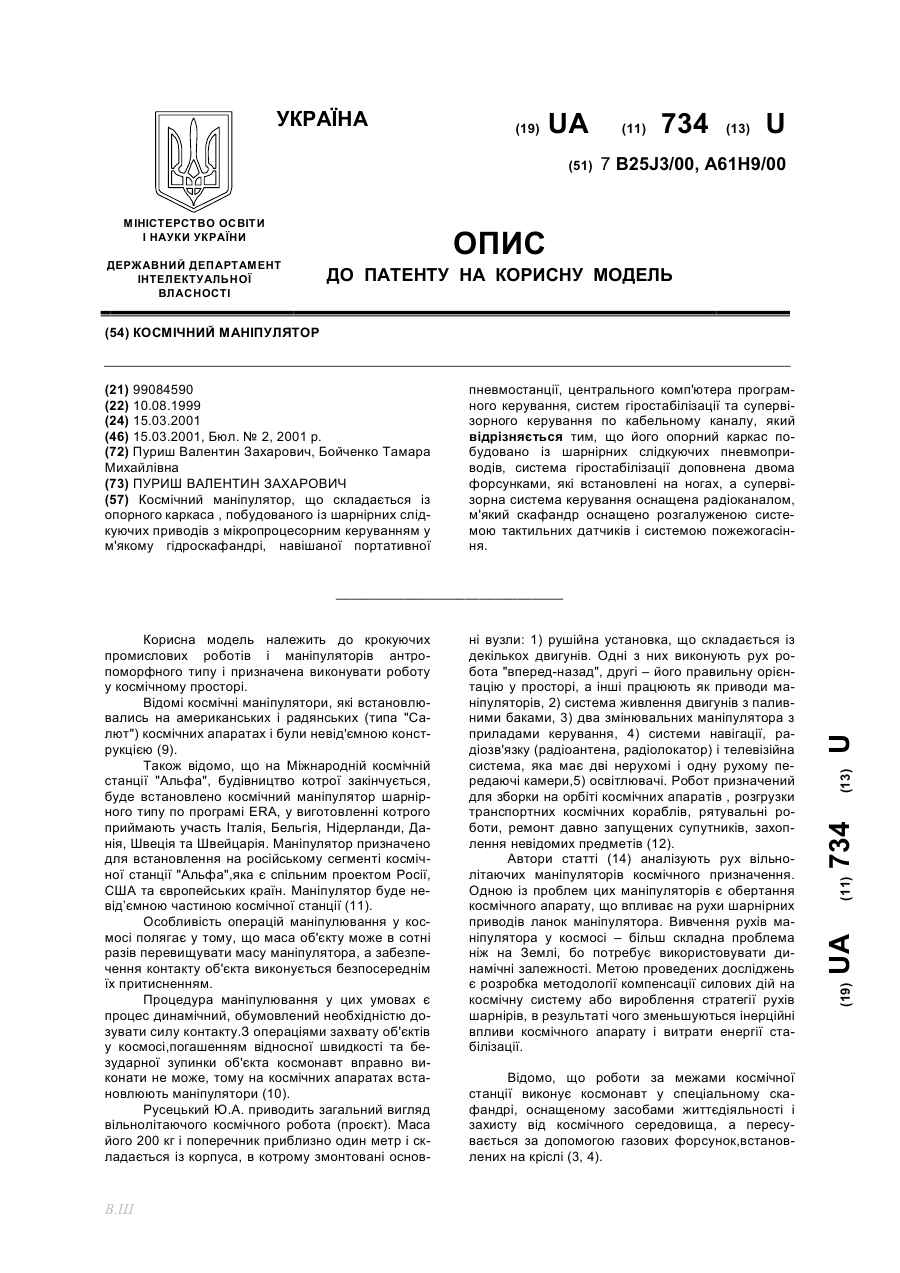
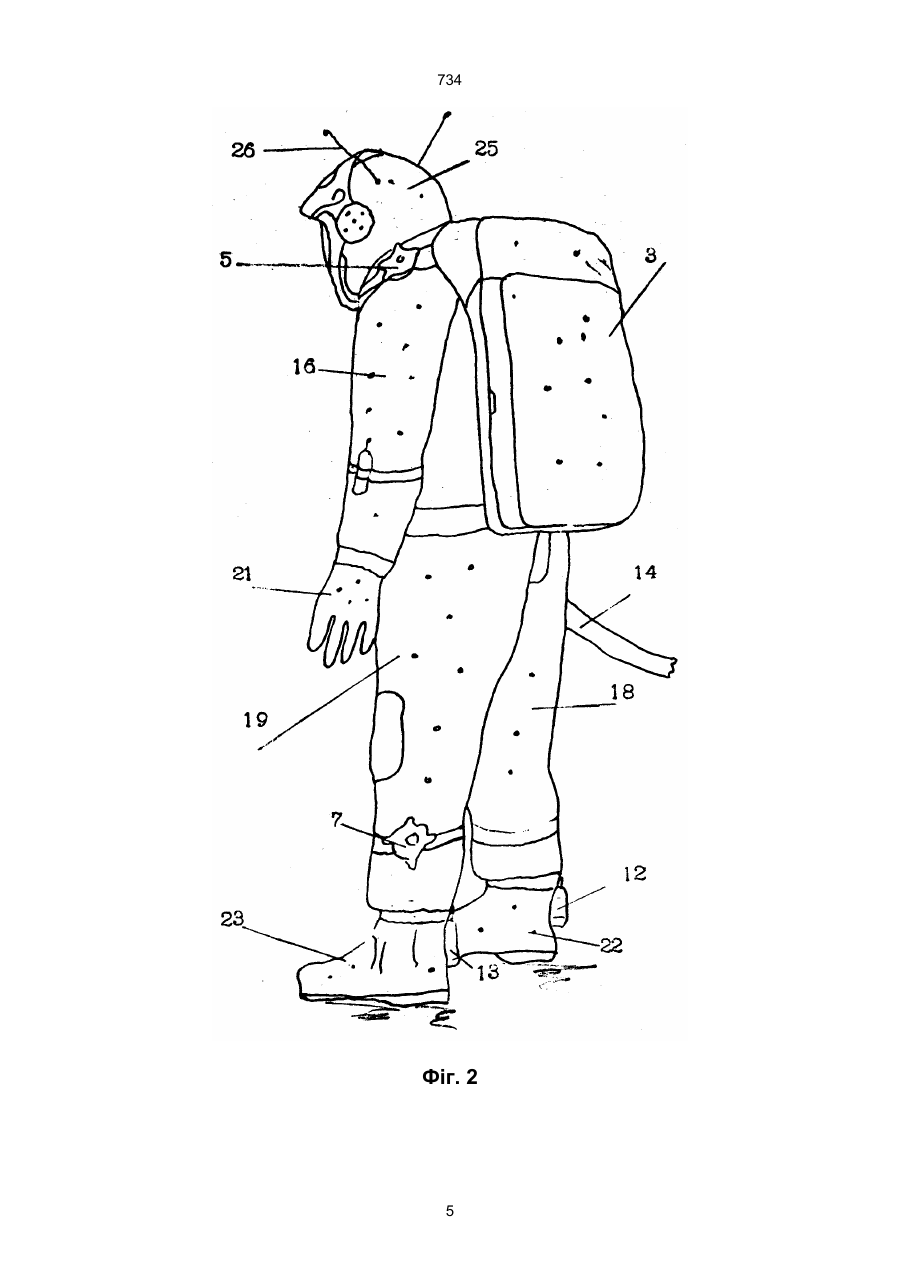
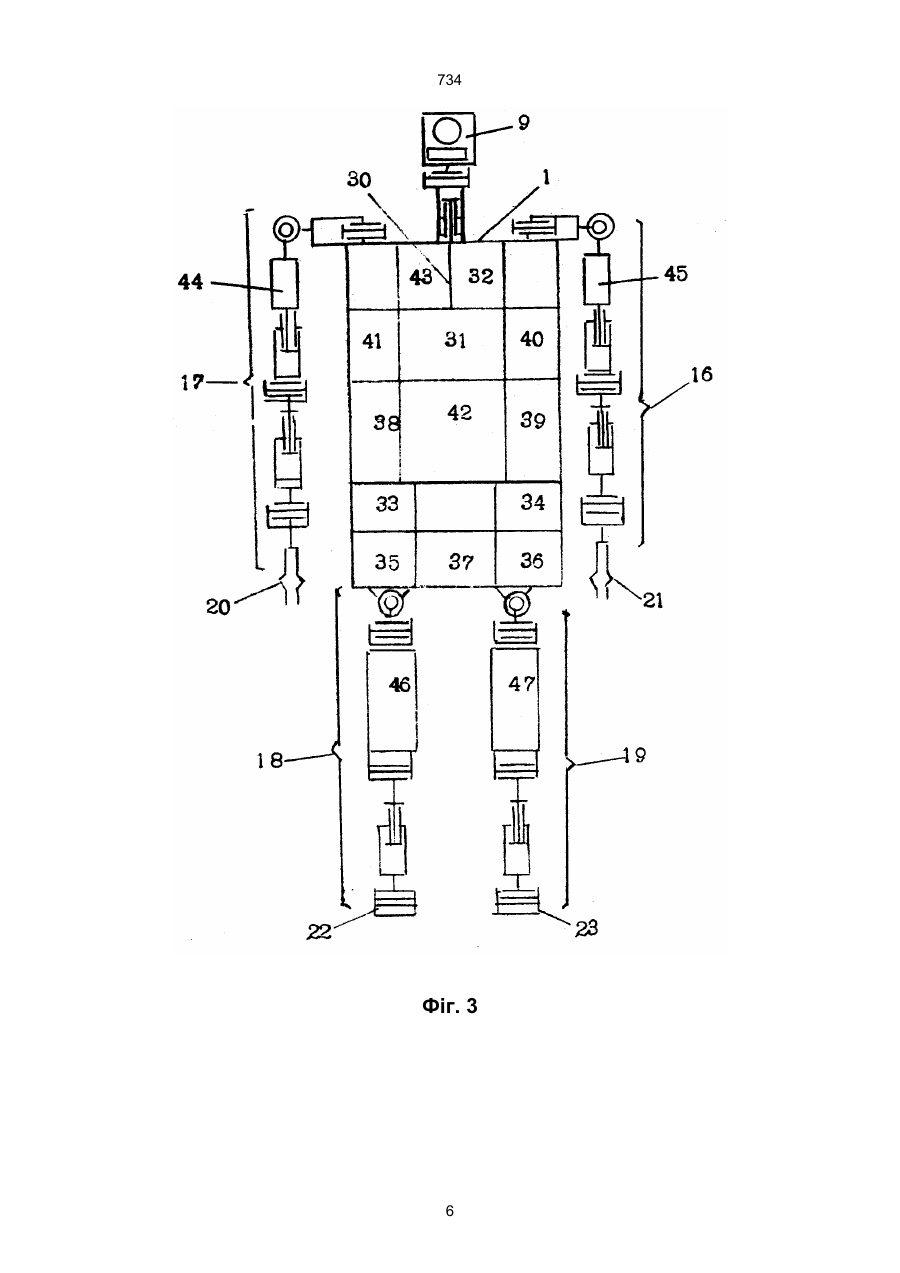
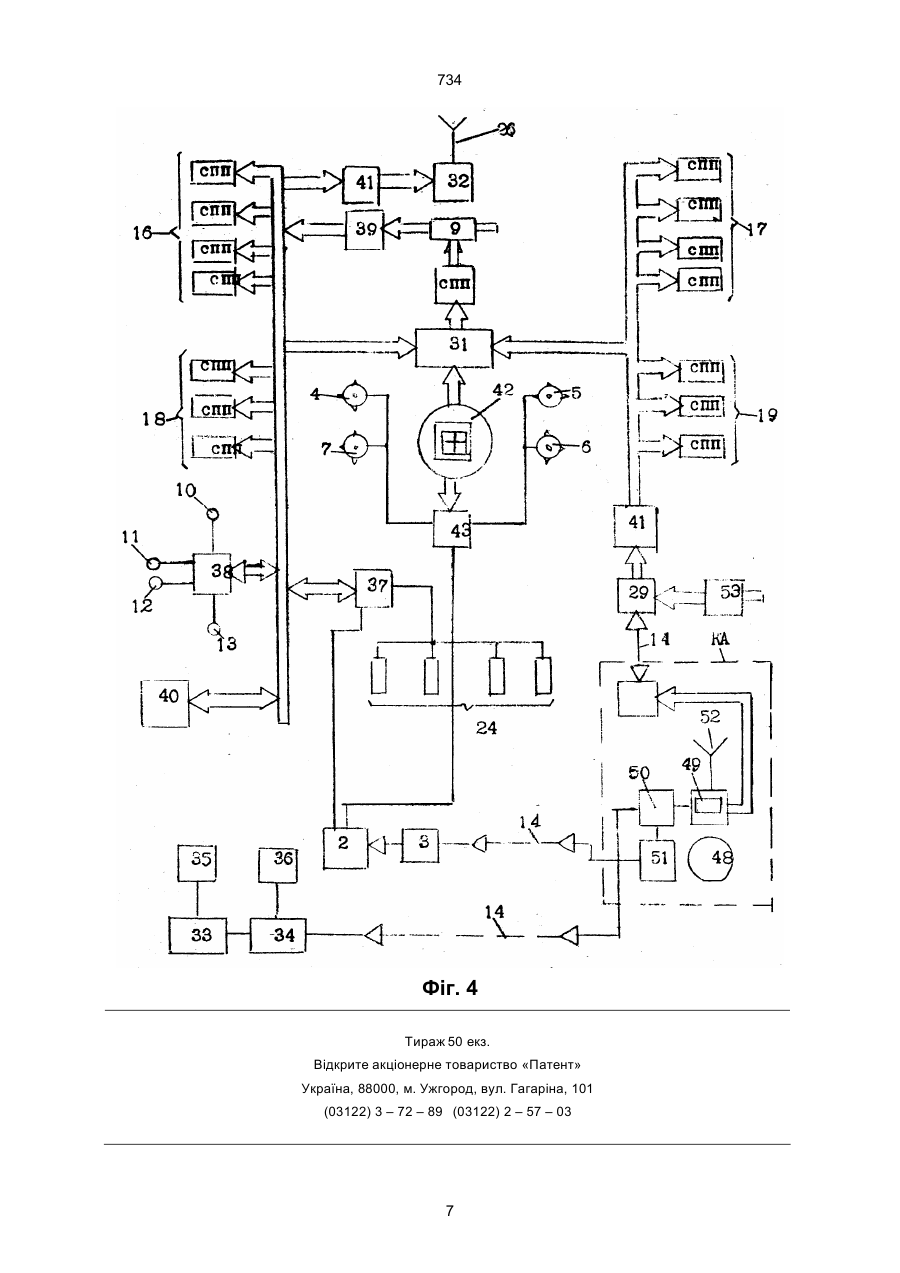
Космічний маніпулятор, що складається із опорного каркаса , побудованого із шарнірних слідкуючих приводів з мікропроцесорним керуванням у м'якому гідроскафандрі, навішаної портативної пневмостанції, центрального комп'ютера програмного керування, систем гіростабілізації та супервізорного керування по кабельному каналу, який відрізняється тим, що його опорний каркас побудовано із шарнірних слідкуючих пневмоприводів, система гіростабілізації доповнена двома форсунками, які встановлені на ногах, a супервізорна система керування оснащена радіоканалом, м'який скафандр оснащено розгалуженою системою тактильних датчиків і системою пожежогасіння. В.Ш Відомо, що роботи за межами космічної станції виконує космонавт у спеціальному скафандрі, оснащеному засобами життєдіяльності і захисту від космічного середовища, а пересувається за допомогою газових форсунок,встановлених на кріслі (3, 4). (13) 734 (11) UA ні вузли: 1) рушійна установка, що складається із декількох двигунів. Одні з них виконують рух робота "вперед-назад", другі – його правильну орієнтацію у просторі, а інші працюють як приводи маніпуляторів, 2) система живлення двигунів з паливними баками, 3) два змінювальних маніпулятора з приладами керування, 4) системи навігації, радіозв'язку (радіоантена, радіолокатор) і телевізійна система, яка має дві нерухомі і одну рухому передаючі камери,5) освітлювачі. Робот призначений для зборки на орбіті космічних апаратів , розгрузки транспортних космічних кораблів, рятувальні роботи, ремонт давно запущених супутників, захоплення невідомих предметів (12). Автори статті (14) аналізують рух вільнолітаючих маніпуляторів космічного призначення. Одною із проблем цих маніпуляторів є обертання космічного апарату, що впливає на рухи шарнірних приводів ланок маніпулятора. Вивчення рухів маніпулятора у космосі – більш складна проблема ніж на Землі, бо потребує використовувати динамічні залежності. Метою проведених досліджень є розробка методології компенсації силових дій на космічну систему або вироблення стратегії рухів шарнірів, в результаті чого зменьшуються інерційні впливи космічного апарату і витрати енергії стабілізації. (19) Корисна модель належить до крокуючих промислових роботів і маніпуляторів антропоморфного типу і призначена виконувати роботу у космічному просторі. Відомі космічні маніпулятори, які встановлювались на американських і радянських (типа "Салют") космічних апаратах і були невід'ємною конструкцією (9). Також відомо, що на Міжнародній космічній станції "Альфа", будівництво котрої закінчується, буде встановлено космічний маніпулятор шарнірного типу по програмі ERA, у виготовленні котрого приймають участь Італія, Бельгія, Нідерланди, Данія, Швеція та Швейцарія. Маніпулятор призначено для встановлення на російському сегменті космічної станції "Альфа",яка є спільним проектом Росії, США та європейських країн. Маніпулятор буде невід’ємною частиною космічної станції (11). Особливість операцій маніпулювання у космосі полягає у тому, що маса об'єкту може в сотні разів перевищувати масу маніпулятора, а забезпечення контакту об'єкта виконується безпосереднім їх притисненням. Процедура маніпулювання у цих умовах є процес динамічний, обумовлений необхідністю дозувати силу контакту.З операціями захвату об'єктів у космосі,погашенням відносної швидкості та безударної зупинки об'єкта космонавт вправно виконати не може, тому на космічних апаратах встановлюють маніпулятори (10). Русецький Ю.А. приводить загальний вигляд вільнолітаючого космічного робота (проєкт). Маса його 200 кг і поперечник приблизно один метр і складається із корпуса, в котрому змонтовані основ U ______________________________ 734 Найбільш близьким до заявляємої корисної моделі може бути "Підводний маніпулятор", запропонований по заявці N99031284/K, котрий приймаємо за прототип (1). "Підводний маніпулятор" містить опірний каркас із шарнірних елементів, виконаних у вигляді слідкуючих гідроприводів у м'якому гідроскафандрі, крім того оснащений навішаною пневмогідростанцією, центральним комп’ютером програмного управління, системами гіростабілізації і супервізорного управління по кабельному та акустичному каналам. Використати його у космосі неможливо з таких причин: а) наявність у ньому гідроприводів при аварійному пошкодженні гідроскафандра призведе до значного забруднення середовища космічного апарату, б) гіростабілізація і політ за допомогою двох форсунок на плечах неможливі, в) відсутня власна система пожежотушіння, г) можливі зіткнення з апаратурою і космонавтами може призвести до значних пошкоджень з обох сторін, д) в разі обриву кабеля супервізорного управління або його пошкодженні, повернення із вільного польоту неможливе. В основу корисної моделі поставлено задачу удосконалення підводного маніпулятора, в якому шляхом додаткового оснащення спеціальними функціональними системами і приладами забезпечується розширення функціональних можливостей та меж застосування, наприклад, у космосі. Поставлена задача вирішується таким чином, що у космічному маніпуляторі, який складається із опірного каркаса, побудованого із слідкуючих приводів з мікропроцесорним управлінням у м'якому гідроскафандрі портативної пневмостанції, центрального комп’ютера програмного управління, систем гіростабілізації та супервізорного управління по кабельному каналу опірний каркас побудовано із шарнірних слідкуючих пневмоприводів, система гіростабілізації доповнена ще двома форсунками на ногах,а супервізорна система управління–радіоканалом, м'який скафандр оснащено розгалуженою системою тактильних датчиків і системою пожежотушіння. Наявність у заявляємому космічному маніпуляторі слідкуючих пневмоприводів з мікропроцесорним управлінням дозволяє в разі пошкодження м'якого гідроскафандра уникнути забруднення внутрішнього середовища космічного апарату або станції. Вказані пневмоприводи утворюють ланки маніпуляторів рук і ніг і мають такіж можливості як гідроприводи. Доповнення системи гіростабілізації двома форсунками на ногах дозволяє виконувати вільний політ космічного маніпулятора у трьох напрямах декартової системи координат, а також обертатись навкруги цих вісей, що вкрай необхідно, бо космічний апарат має теж свої рухи у космосі. Радіоканал супервізорного управління дозволяє деякий час керувати космічним маніпулятором із космічної станції без кабельного каналу , тривалість дії якого обмежені запасами пневмо- та електроживлення. Доповнення космічного маніпулятора сонячними джерелами живлення та іонними двигунами може зробити його автономним більш тривалий час. Розгалужена система тактильних датчиків дозволяє реагувати космічному маніпуляторові на зіткнення, бо тактильні датчики розташовані на зовнішній поверхні гідроскафандра і пневмостанції. Кожне зіткнення обробляється центральним комп’ютером і видаються команди на протилежний рух від зіткнення. Оснащення гідроскафандра датчиками, які реагують на наближення, може зовсім не допустити зіткнення. Система пожежотушіння реагує на небезпечне підвищення температури у середині м'якого скафандра і заповнювати його інертним газом, а також попереджає оператора. На фіг. 1 зображено космічний маніпулятор, вид з переду, на фіг.2 – вид збоку, на фіг.5 – кінематична схема і розташування блоків, на фіг. 4 – структурна схема управління. Космічний маніпулятор (фіг.1,2) складається із опірного каркаса 1, побудованого із шарнірних слідкуючих пневмоприводів з мікропроцесорним управлінням, м'якого гідроскафандра 2, навішаної портативної пневмостанції 3, форсунок гіростабілізації з чотирма соплами 4,5,6,7, електроосвітлювача 8, головної телекамери 9, лазерних вимірювачей відстані 10,11,12,13, кабель-шлангу електропневможивлення 14, фала фіксації положення 15, маніпуляторів рук 16,17, маніпуляторів ніг 18,19, захватів 20,21, ботів з тактильними датчиками та магнітною підошвою 22, 23, розгалуженої мережі тактильних датчиків 24, шлема 25, антени 26 , регулятора швидкості пересування 27, пульта аварійного управління 28, з'єднувача з оглядовою телекамерою 29. У корпусі 50 опірного каркаса (фіг.3) розташовані функціональні блоки: центрального комп’ютера 31, радіоканалу супервізорного управління 32, електроживлення 33, 34, акумуляторів 35,36, системи обробки тактильних датчиків 37,обробки лазерних вимірювачей відстані 38, обробки відеокадрів 39, аварійного стану 40, телеуправління 41, гіростабілізації 42, клапанів форсунок 43. Маніпулятори рук 16,17 мають пневмоакумулятори 44,45, а маніпулятори ніг 18,19 - пневмоакумулятори 46,47. За межами космічного маніпулятора , а саме у космічному апараті чи станції, знаходиться оператор супервізорного управління 48, з пультом управління 49, станцією електроживлення 50, станцією пневможивлення 51, радіоантеною 52. Пульт управління 49 з'єднано кабель-шлангом 14 з космічним маніпулятором. Оглядова телекамера 53 , що слідкує за поведінкою космічного маніпулятора по команді оператора 48, кріпиться на конструкціях космічного апарату у зоні роботи (таке розташування має безліч варіантів тому не показане). Космічний маніпулятор працює у таких режимах: підготовка, вихід із космічного апарату,космічний політ, фіксація на робочому місці, встановлення оглядової телекамери, виконання роботи, аварійний стан,повернення до космічного апарату, взаємодія з космонавтом (фіг.4). У режимі підготовки проводиться перевірка всій систем і рухів. По команді оператора 48 з пульта управління 49 подається електроживлення на космічний маніпулятор до блоків 33,34 по кабель-шлангу 14 від станції електроживлення 50. 2 734 Пневможивлення подається від станції пневможивлення 51 через кабель-шланг 14 у внутрішній простір скафандра космічного маніпулятора через регулюючий клапан. Пневмостанція 3 своїм компресором зтискує поданий газ до 10-15 МПа і подає на систему гіростабілізації 42 а саме до блока клапанів форсунок 45 і до слідкуючих пневмоприводів маніпуляторів рук 16,17, та ніг 18,19. Газова суміш, що подається до скафандра, складається із вуглекислого газу та аргону і виконує ще і функцію пожежобезпечного середовища у скафандрі. Відпрацьований газ у пневмоприводах повертається у внутрішнє середовище скафандра, проходячи через фільтри. Тиск газу у скафандрі регулюється автоматично в залежності від витрат його на політ і гіростабілізацію через форсунки 4,5,6,7. Регулятором 27 можна змінювати робочий тиск газу, що іде на пневмоприводи і цим уповільнювати рухи (це може зробити космонавт-наглядач при роботі в парі). Пульт аварійного управління 28 призначений для корекції положення космічного маніпулятора на робочому місці. При перевірці космічний маніпулятор знаходиться у полі зору оператора 48, який і спостерігає виконання діагностичної програми рухів. У режимі виходу із космічного апарату космічний маніпулятор переходить до шлюзової камери, а звідти вже в космос, беручи з собою оглядову телекамеру 53 і необхідний інструмент для роботи. Вихід виконується по супервізорному каналу оператором 48 через головну телекамеру 9 у шлемі 25. У режимі польоту оператор керує дією форсунок 4,5,6,7, спостерігаючи за космічним маніпулятором у свій ілюмінатор, а також орієнтуючись на показання лазерних вимірювачей відстані 10,11,12,13. У режимі фіксації на робочому місці космічний маніпулятор фіксується за конструкцію космічного апарату за допомогою фала 15 і оператор 48 вибирає позицію робочого стану за допомогою системи гіростабілізації 42. У режимі встановлення оглядової телекамери 53 космічний маніпулятор закріплює її на конструкції космічного апарату для спостереження за роботою з пульта управління 49. У режимі виконання роботи передбачається застосування спеціального космічного інструмента, який використовує космонавт, по відпрацьованій програмі. Можлива робота по програмі самонавчання, коли оператор 48 корегує використанням інструмента. У режимі аварійного стану передбачено повернення космічного маніпулятора при обриві кабель-шлангу 14 або відмові якогось функціонального блоку у корпусі 55. При цьому електроживлення автоматично переходить від акумуляторів 35,36, а пневможивлення від резервного балона газу, а супервізорне управління оператор 48 виконує по радіоканалу. У режимі повернення до шлюзової камери оператор 48 включає програму зняття фала 15, перевірки стану інструменту, зняття оглядової телекамери 53, політ до шлюзової камери космічного апарату. У режимі взаємодії з космонавтом або другим подібним космічним маніпулятором нема пот реби у застосуванні оглядової телекамери 53, тому що оператору 48 є можливість спостерігати на пульті управління 49 за поведінкою обох через головні телекамери у шлемі 25. Робота у парі космічний маніпулятор-космонавт, або два космічних маніпулятора найбільш продуктивна і вимагає простих програм, але більше операторів. Безпечна взаємодія (можливе зіткнення) космічного маніпулятора з навколишнім середовищем в разі помилки оператора гарантує розгалужена система тактильних датчиків на скафандрі 24 зі своїм блоком обробки 37, котрий зупиняє рухи космічного маніпулятора в разі зіткнення. Лазерні вимірювачі відстані 10,11,12,13 теж задіяні в систему попередження зіткнення. Космічний маніпуляор призначено для виконання оглядових і ремонтних робіт у зоні космічного апарату-станції (сонячні панелі, антени, стикуючий вузол, причалювання космічних апаратів до космічної станції "Альфа", роботи на поверхні Місяця) коли перебування у відкритому космосі потребує багато часу і це стає неможливим для космонавта. Орієнтовна вартість космічного маніпулятора становить 50 тисяч доларів без програмного забезпечення. Використана інформація 1.Підводний маніпулятор. Заявка на корисну модель. Реєстраційний номер 99031284/К від 09.03.1999. Держпатенту України (прототип). 2. Двохкоординатний модуль шарніра. Реєстраційний номер 99031283/К. Заявка від 09.03.1999 (експерт Н.Г.Брагіна) - пневмоприводи маніпуляторів рук і ніг заявляємого космічного маніпулятора. 3. Скафандр космонавта. Авиация и космонавтика. 1972, № 4, с.32. 4.Алексеев С.М.,Уманский С.П. Высотные и космические скафандры. М.,1973. 5.Космический инструмент. Авиация и космонавтика.1980, N2. 6.Иерархическое управление интеллектуальными устройствами в приложении к телероботам космических станций. Робототехника. Экспресс-информация. N20, c.10-17, 1990. 7. Робототехника и искусственный интеллект в проекте космической станции. Робототехника. Экспресс-информация. N25, 1987, с.7-10. 8.Комбинированный видеосенсор с возможностью измерения дальности. Робототехника. Экспресс-информация. N18, 1987,с.9-15. 9.Космическая станция "Салют-6". Авиация и космонавтика. N5, 1978, с.24-25. 10.Карендясев А.И. др. Манипуляционные системы роботов.-Машиностроение. 1989,с.42-43. 11. Современные технологии автоматизации. 1997, N1, с.106. 12. Русецкий А. Ю. В мире роботов. М., Просвещение, 1990,с.105-107. 13. Робот в космическом пространстве – помощник астронавтов. Roboter im Weltraum - Helfer der Astronauten (Richter Fred//Techn. Rdsch.-1999.91,N9,-c. 34-38.-Нем. 14. Разработка проблем динамики свободно летающих манипуляторов космического назначения.A contribution to the dunamics of tree-flying space //Mech. and Mach.Theory.-1999.-34, N3.-359-372. 3 734 Фіг. 1 4 734 Фіг. 2 5 734 Фіг. 3 6 734 Фіг. 4 Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122) 3 – 72 – 89 (03122) 2 – 57 – 03 7
ДивитисяДодаткова інформація
Назва патенту англійськоюSpace manipulator
Автори англійськоюPurish Valentyn Zakharovych, Purysh Valentyn Zakharovych, Boichenko Tamara Mykhailivna
Назва патенту російськоюКосмический манипулятор
Автори російськоюПуриш Валентин Захарович, Бойченко Тамара Михайловна
МПК / Мітки
Мітки: космічний, маніпулятор
Код посилання
<a href="https://ua.patents.su/7-734-kosmichnijj-manipulyator.html" target="_blank" rel="follow" title="База патентів України">Космічний маніпулятор</a>
Підводний маніпулятор

Номер патенту: 706
Опубліковано: 15.02.2001
Автори: Пуриш Валентин Захарович, Корольов Сергій Михайлович, Корольова Галина Валентинівна
МПК: B25J 3/00
Мітки: підводний, маніпулятор
Формула / Реферат:
Підводний .маніпулятор, що містить опорний каркас із шарнірних елементів, покритий оболонкою, який відрізняється тим, що шарнірні елементи обладані слідкуючими гідроприводами з мікропроцесорним управлінням, оболонка виконана у вигляді м'якого гідроскафандра, крім того маніпулятор обладнано навішаною портативною пневмо-гідростанцією, центральним комп'ютером програмного управління та системами гіростабілізації і супервізорного телеуправління по...
Маніпулятор
Номер патенту: 188
Опубліковано: 30.04.1993
Автори: Кравчун Степан Іванович, Шумейко Дмитро Іванович, Мілушин Тимофій Тимофійович
МПК: B25J 9/00
Мітки: маніпулятор
Формула / Реферат:
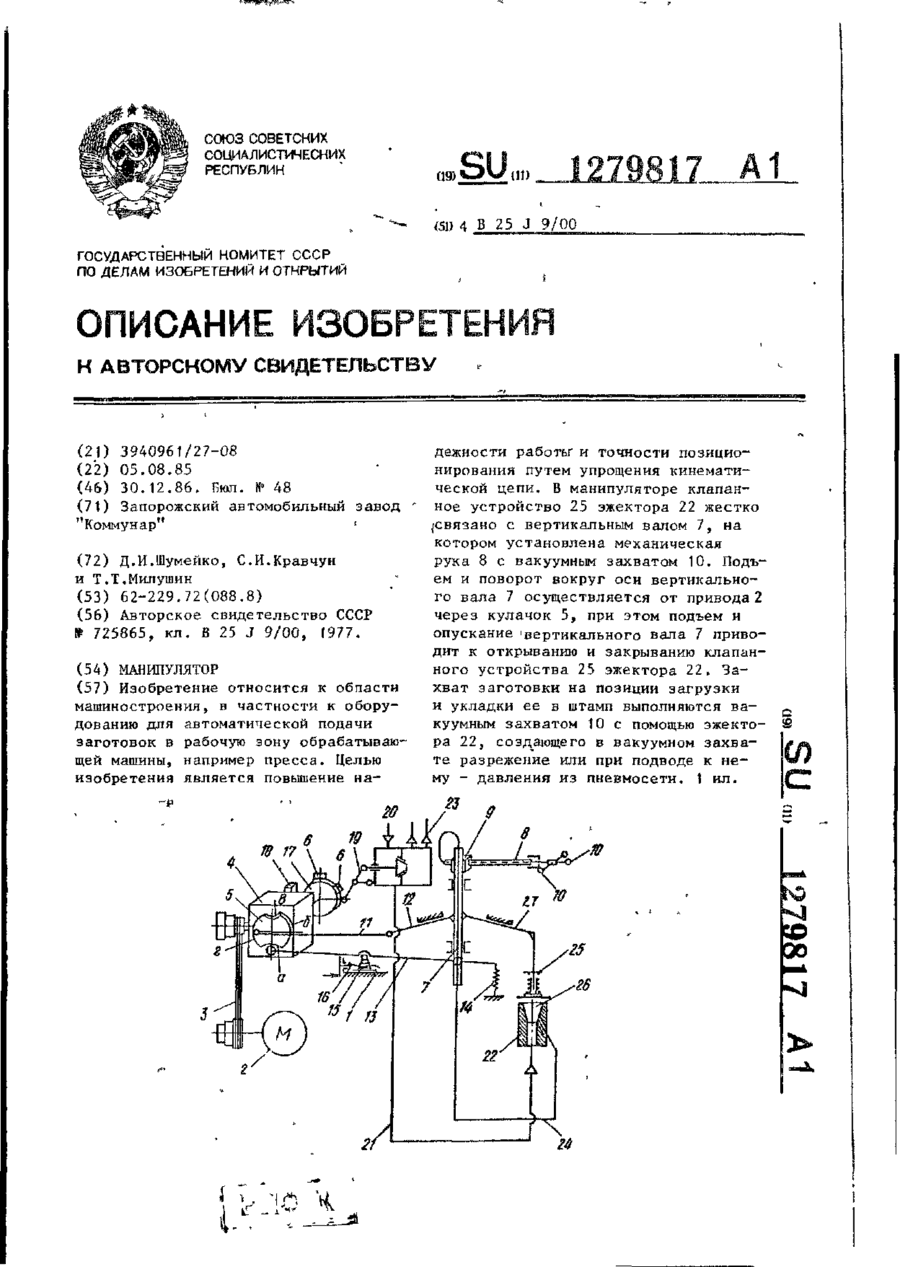
Формула изобретенияМанипулятор, содержащий механическую руку с пневматическими захватными органами, установленную на вертикальном валу, связанном посредством рычажной системы, с приводом ее подъема и поворота, кулачки, закрепленные на валу редуктора и взаимодействующие с пневмоклапаном, связанным трубопроводом с пневматическими механизмами, и эжектор с клапанным устройством, связанный трубопроводом с пневматическими захватными...
Маніпулятор інженера м.в.лєонєнко
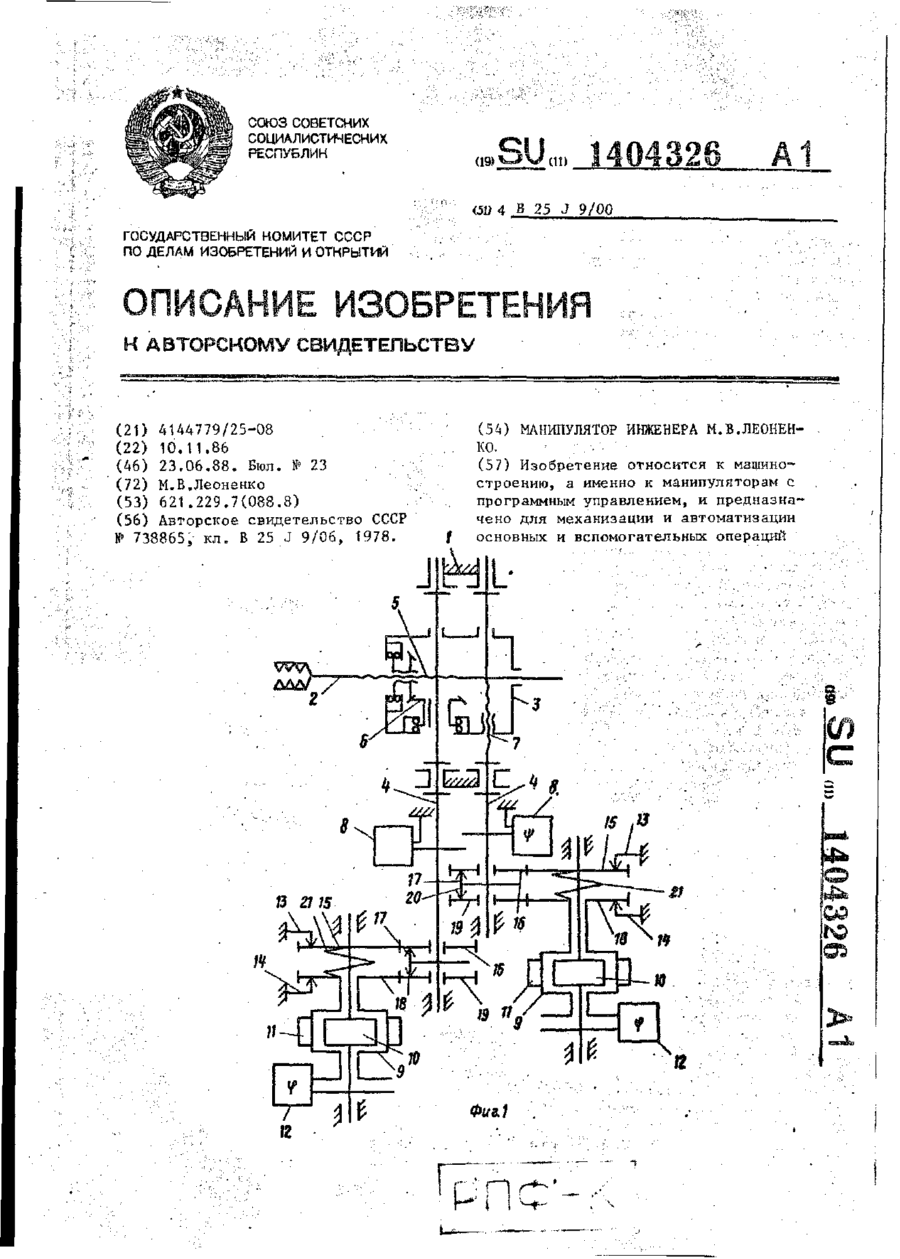
Номер патенту: 9003
Опубліковано: 30.09.1996
Автор: Лєонєнко Михайло Васильович
МПК: B25J 9/00
Мітки: м.в.лєонєнко, інженера, маніпулятор
Формула / Реферат:
1. Манипулятор, содержащий установленный на основании исполнительный орган с приводами его перемещения, каждый из которых включает двигатель, кинематическую цепь для связи двигателя с исполнительным органом, упругий элемент и систему управления, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения возможности позиционирования исполнительного органа в любой точке рабочей зоны манипулятора и повышения...
Маніпулятор
Номер патенту: 6962
Опубліковано: 31.03.1995
Автори: Валюх Володимир Федорович, Саленко Світлана Василівна, Свистун Віталій Леонідович
МПК: B25J 9/02, B25J 11/00
Мітки: маніпулятор
Формула / Реферат:
(57) 1. Манипулятор, содержащий основание, на котором смонтирован вал с механической рукой, в корпусе которой размещен приводной захват, имеющий индивидуальный корпус, а также механизмы подъема и поворота механической руки, отличающийся тем, что он снабжен механизмом автоматической ориентации захвата, выполненным в виде регулируемой тяги, кольца с рычагом и рычага, жестко связанного с корпусом захвата, причем оба рычага шарнирно соединены...
Маніпулятор для внутрішнього контролю циліндричних резервуарів
Номер патенту: 6087
Опубліковано: 29.12.1994
Автори: Ханс Кастль, Райнер Бауер
МПК: G21C 17/003, F22B 37/00, B25J 9/02, B25J 11/00
Мітки: циліндричних, маніпулятор, резервуарів, контролю, внутрішнього
Формула / Реферат:
1. Манипулятор для внутреннего контроля цилиндрических резервуаров, содержащий трубообразную мачту с расположенными на ее нижнем конце пятой и на ее верхнем конце центровочным подшипниковым узлом, выполненный с возможностью перемещения вдоль мачты и охватывающий мачту суппорт для установки на нем контрольного, измерительного или смотрового устройства и связанный с центровочным подшипниковым узлом узел привода поднятия и опускания суппорта,...
Попередній патент: Пристрій для технічного обслуговування газотурбінного двигуна з реверсором тяги у вентиляторному контурі
Наступний патент: Виноградна опора с.а.сидоренка
Випадковий патент: Спосіб профілактики та лікування невиношування вагітності у жінок з інфекціями урогенітальних органів та антифосфоліпідним синдромом