Система підтримання форми надувного матраца
Номер патенту: 92161
Опубліковано: 11.10.2010
Автори: Слімпін Пол Д., Робсон Годфрі Чарльз Александер, Гонсалес Хуан Л., Бірд Марк Стівен Джеймс, Бенделе Кевін В., Оліва Майкл Р., Паркер Джеффрі С., Сміт Кеннет Р., Філліп Брюс Л., Ліна Сізар З., Врзалік Джон Г.

Формула / Реферат
1. Система підтримання пацієнта з контролем цього підтримання, яка включає матрац, що містить множину надувних камер; множину передавачів, розташованих поблизу поверхні множини надувних камер; множину приймачів, розташованих поблизу поверхні множини надувних камер; і мережу, яка містить множину контролерів як вузлів локальної мережі (CAN), які мають зв'язок один з одним і з множиною передавачів і приймачів, причому у системі множина надувних камер матраца має секцію для голови, яка має першу надувну камеру; секцію для тіла, яка має другу надувну камеру, переміжну з третьою надувною камерою; секцію для ніг, яка має четверту надувну камеру, переміжну з п'ятою надувною камеру, а кожна з секцій для голови, для тіла і для ніг має приєднаний до неї щонайменше один контрольний клапан, крім того, у системі множина передавачів утворює пару з однією множиною приймачів, причому щонайменше одна пара з'єднана з щонайменше однією надувною камерою, а кожна пара виконана з можливістю передавати і приймати світлову енергію у східчастому порядку, за яким кожна пара передає і приймає світлову енергію по суті одночасно у поперемінних камерах так, що пари у суміжних камерах не здійснюють передачу і прийом світлової енергії у той же час.
2. Система за п. 1, яка відрізняється тим, що включає джерело постачання під тиском текучого середовища, яке має зв'язок з множиною надувних камер матраца та мережею, причому джерело виконане з можливістю контрольованого наповнення множини надувних камер згідно з даними, прийнятими щонайменше одним з множини приймачів.
Текст
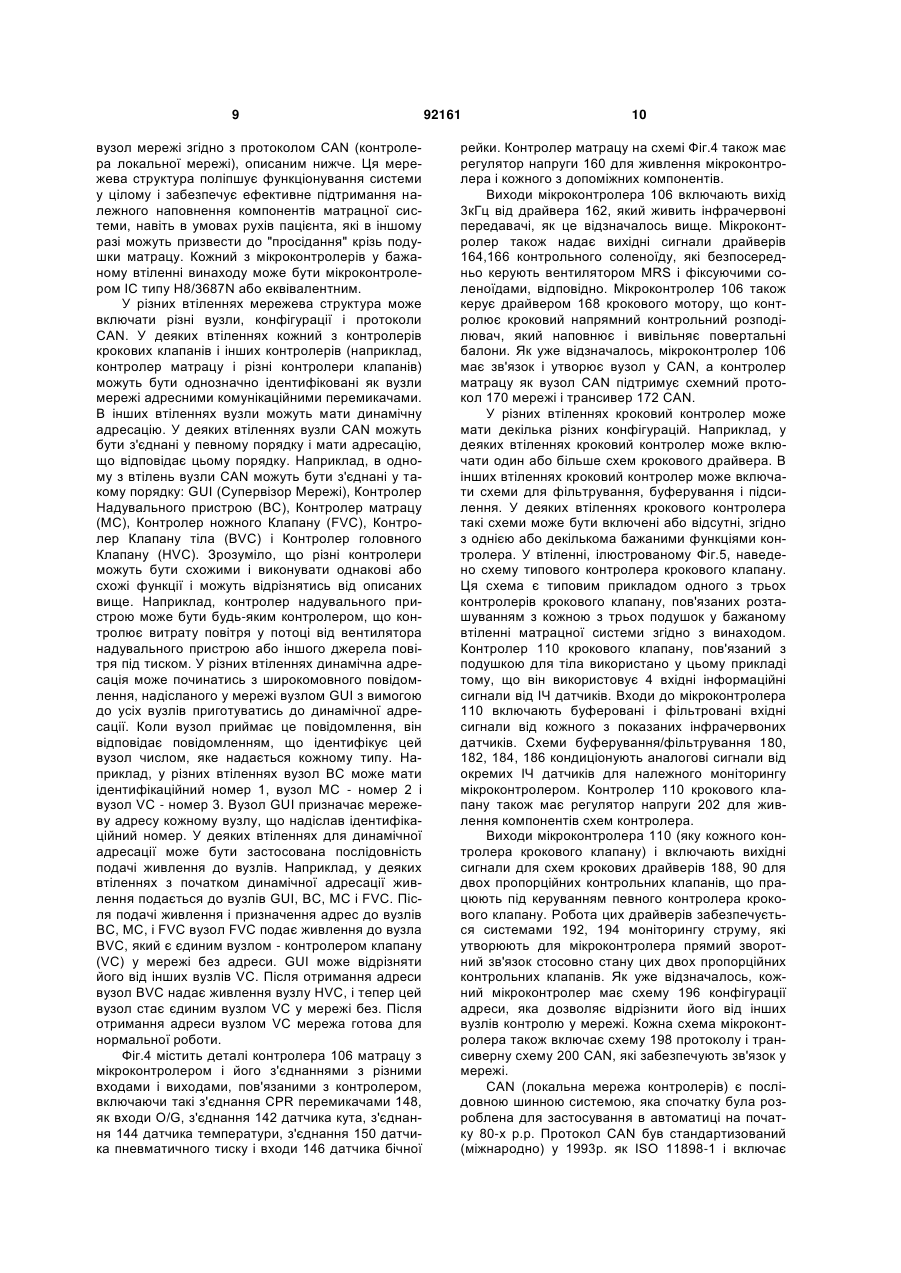
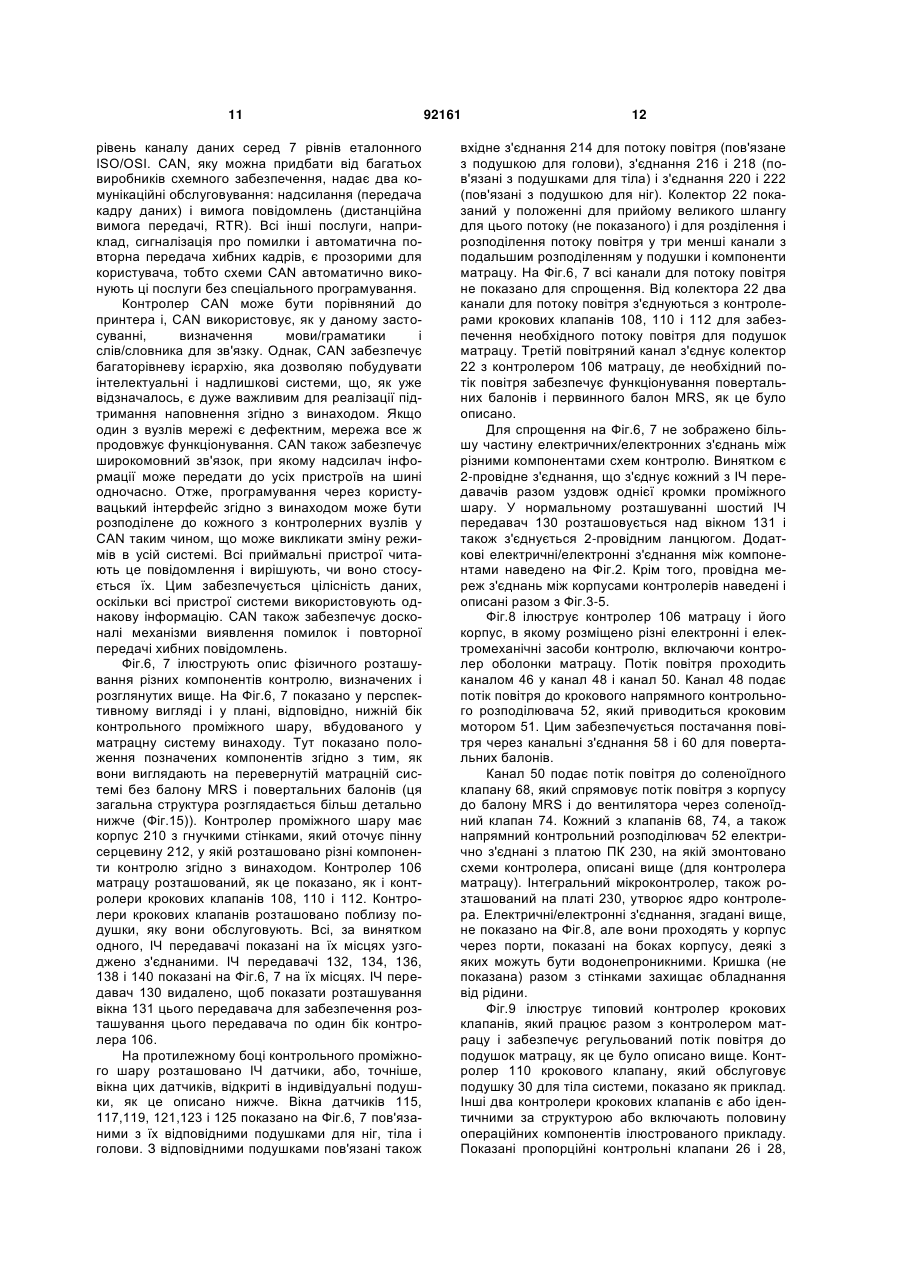
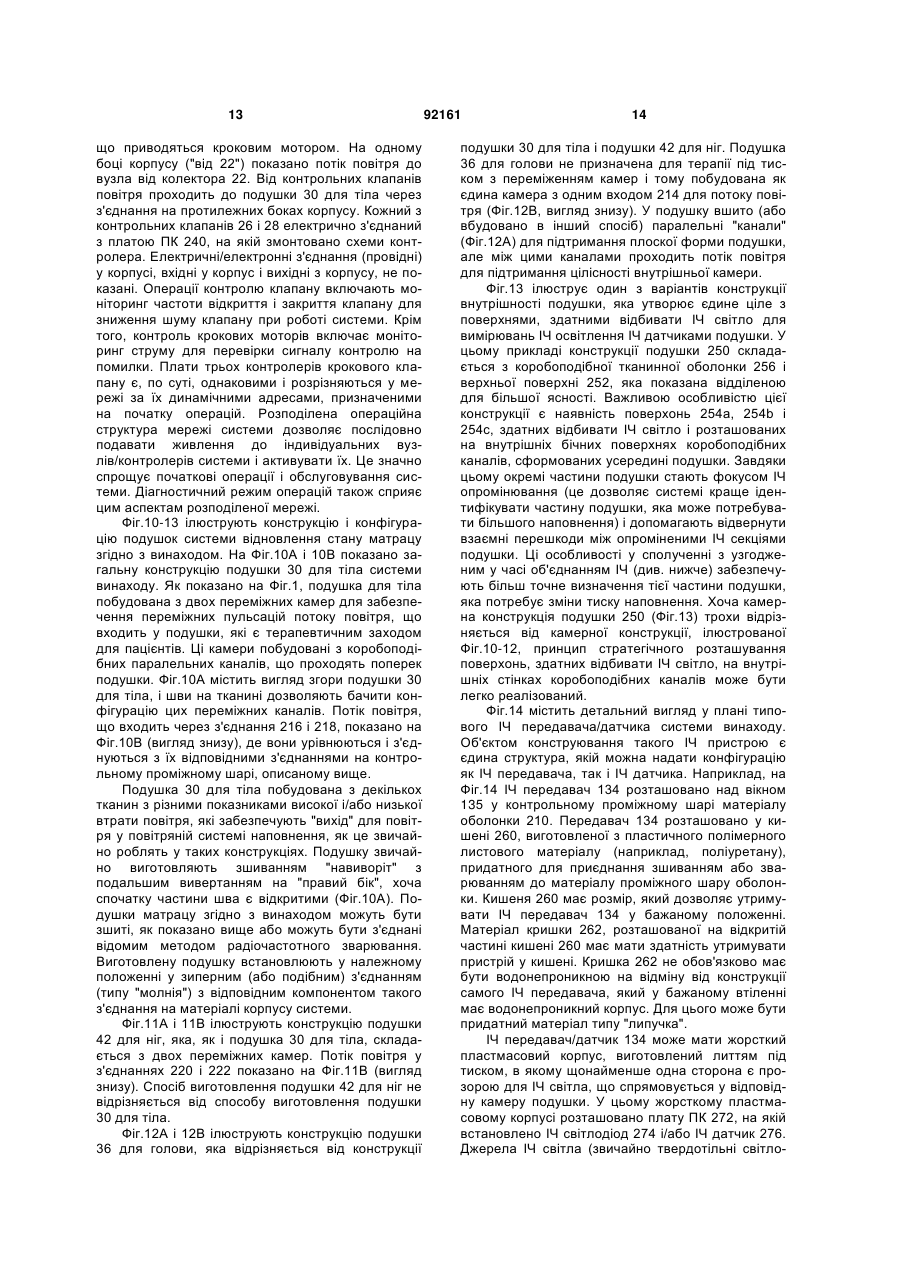
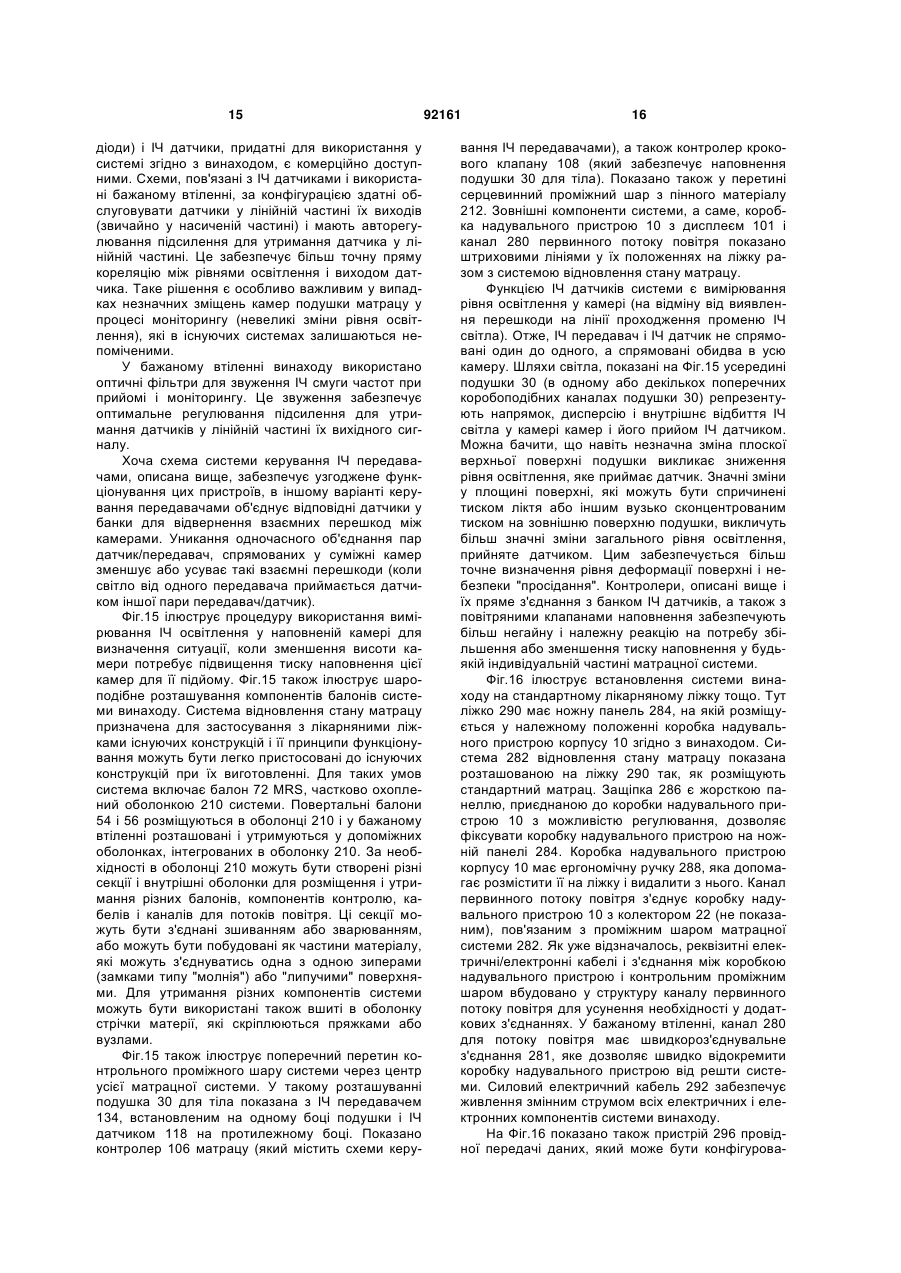
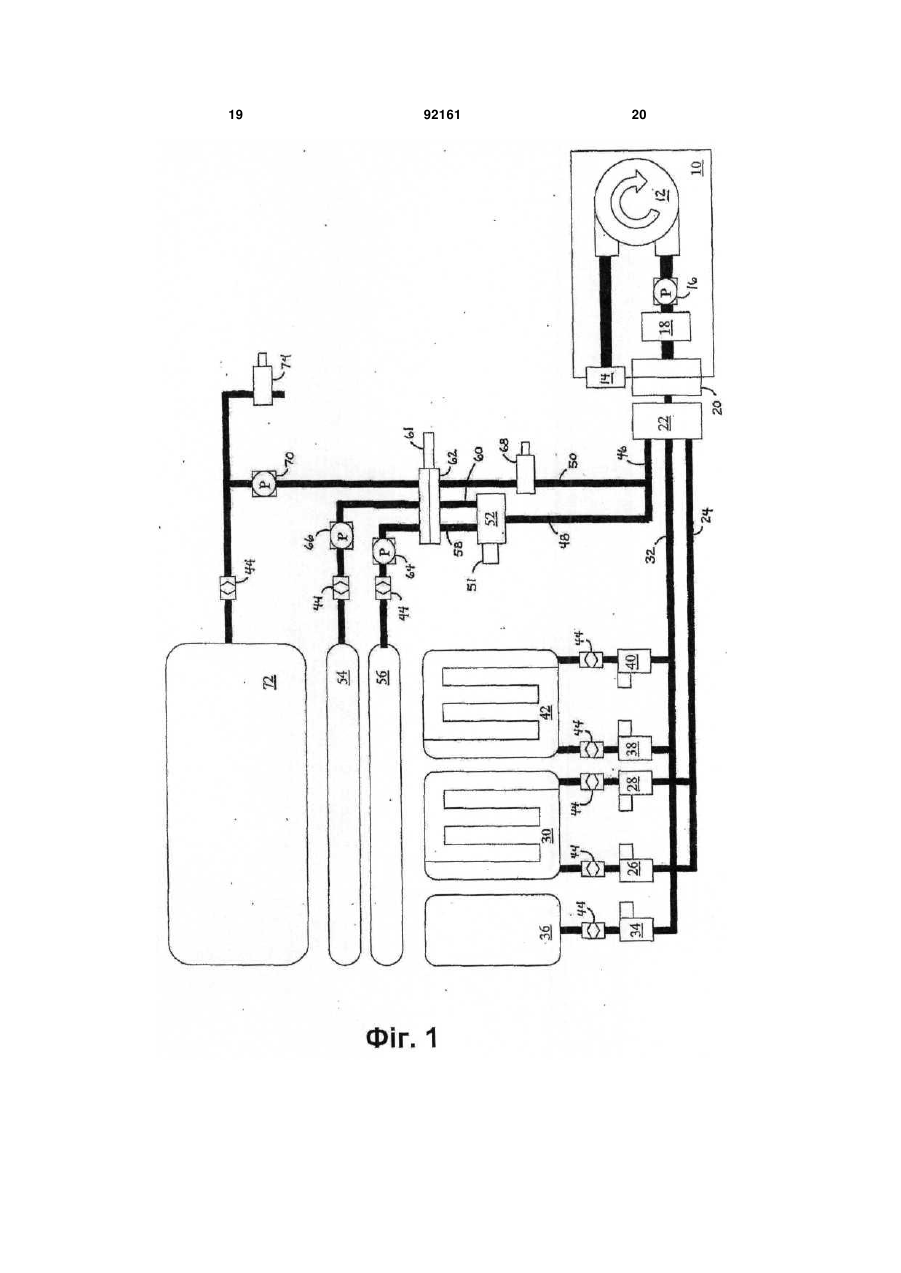
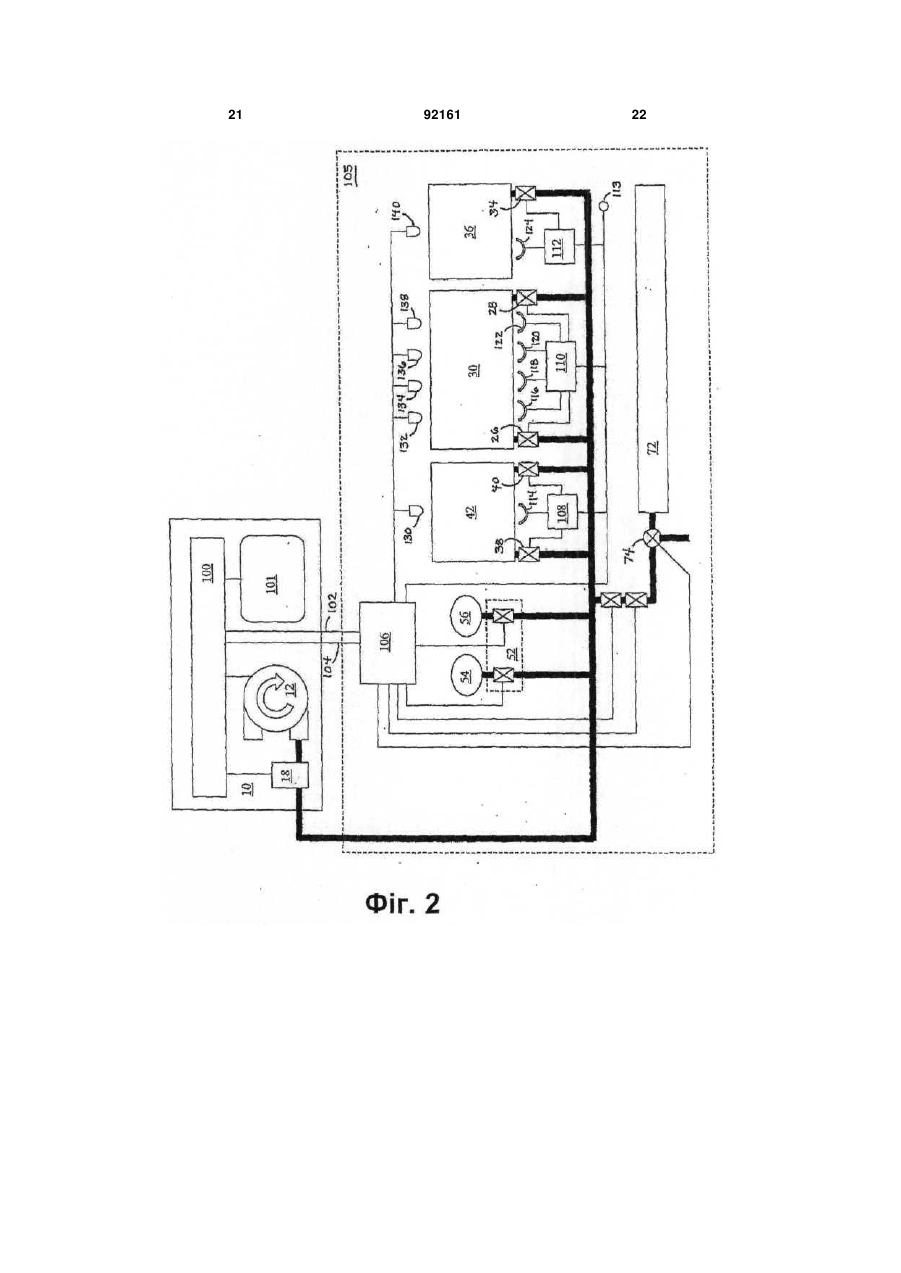
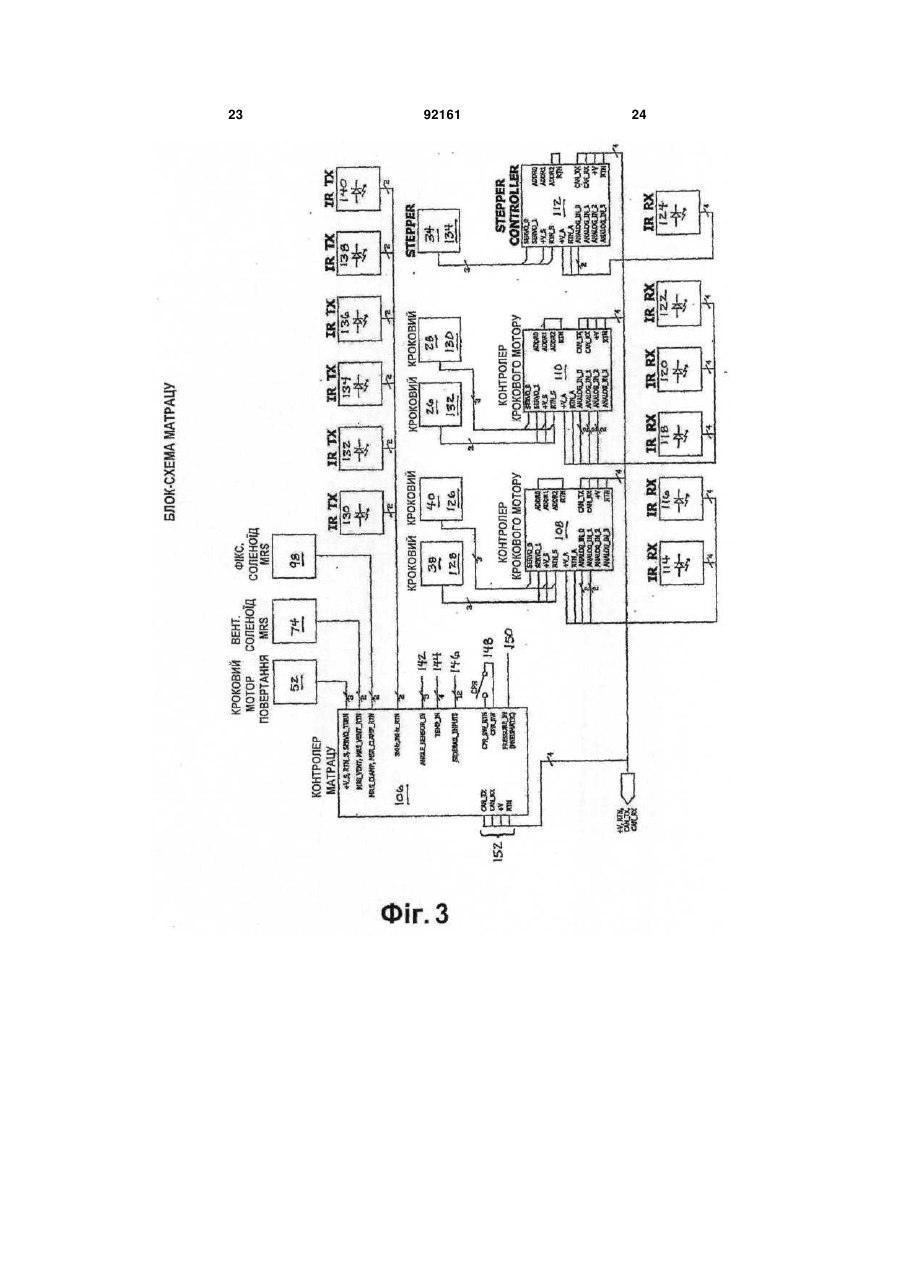
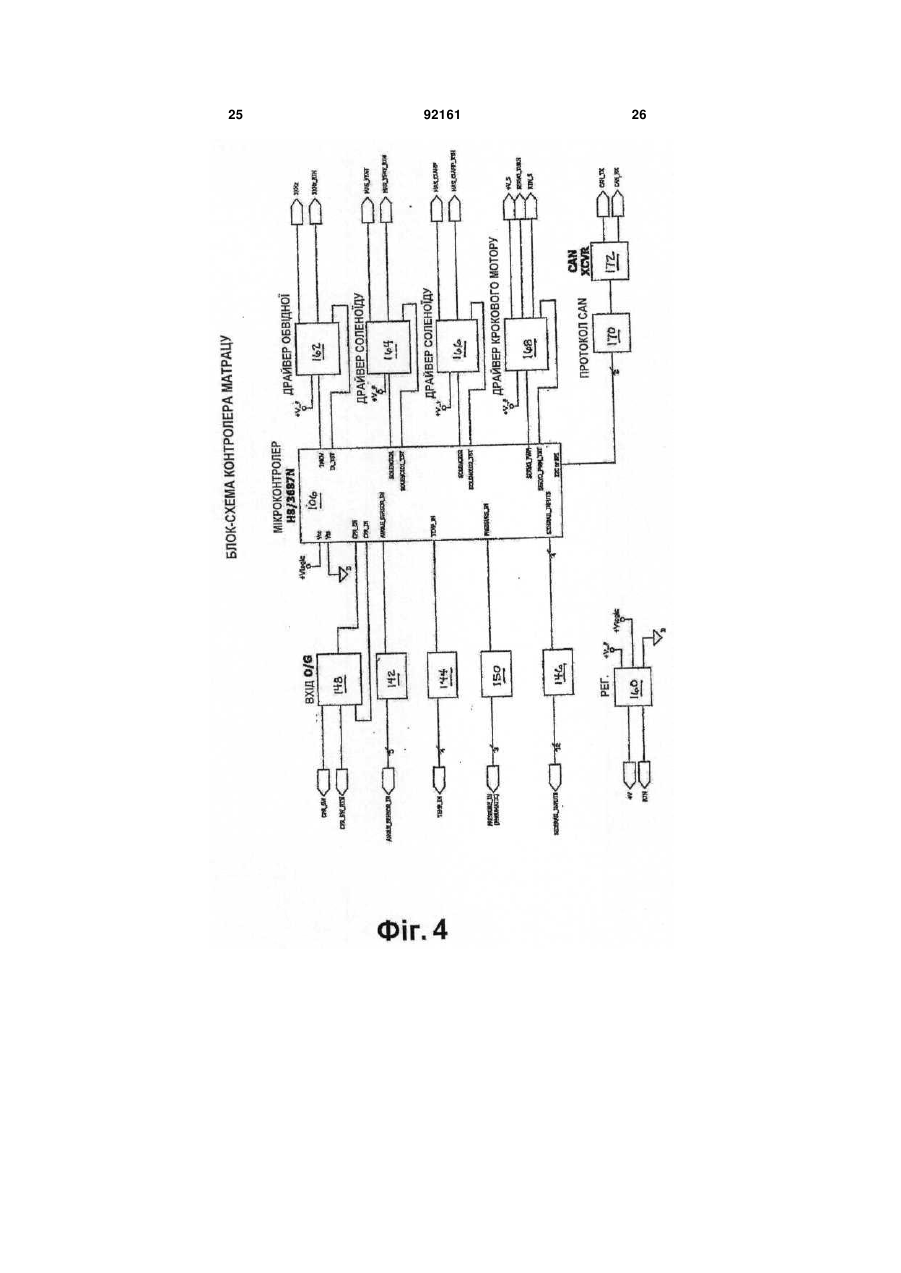
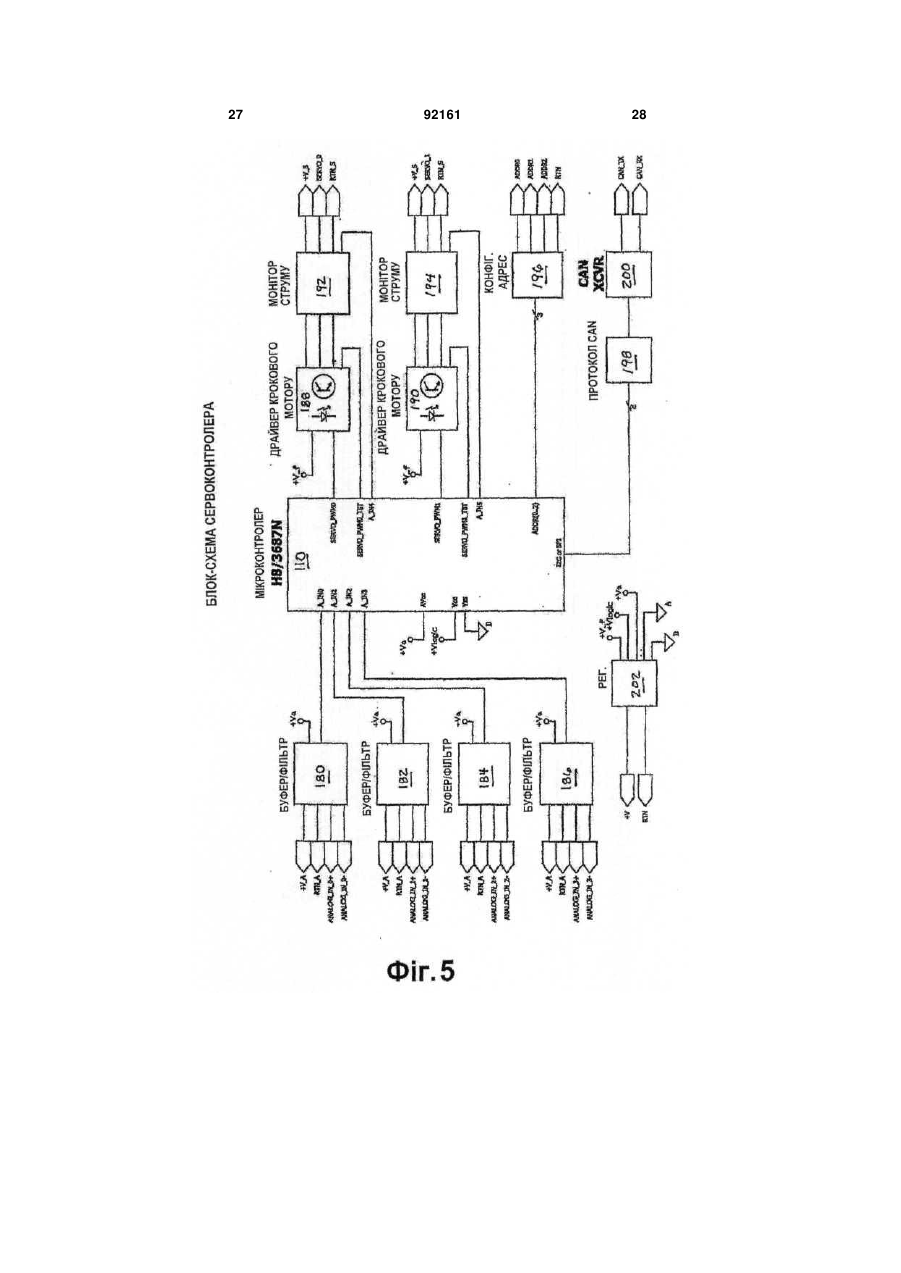
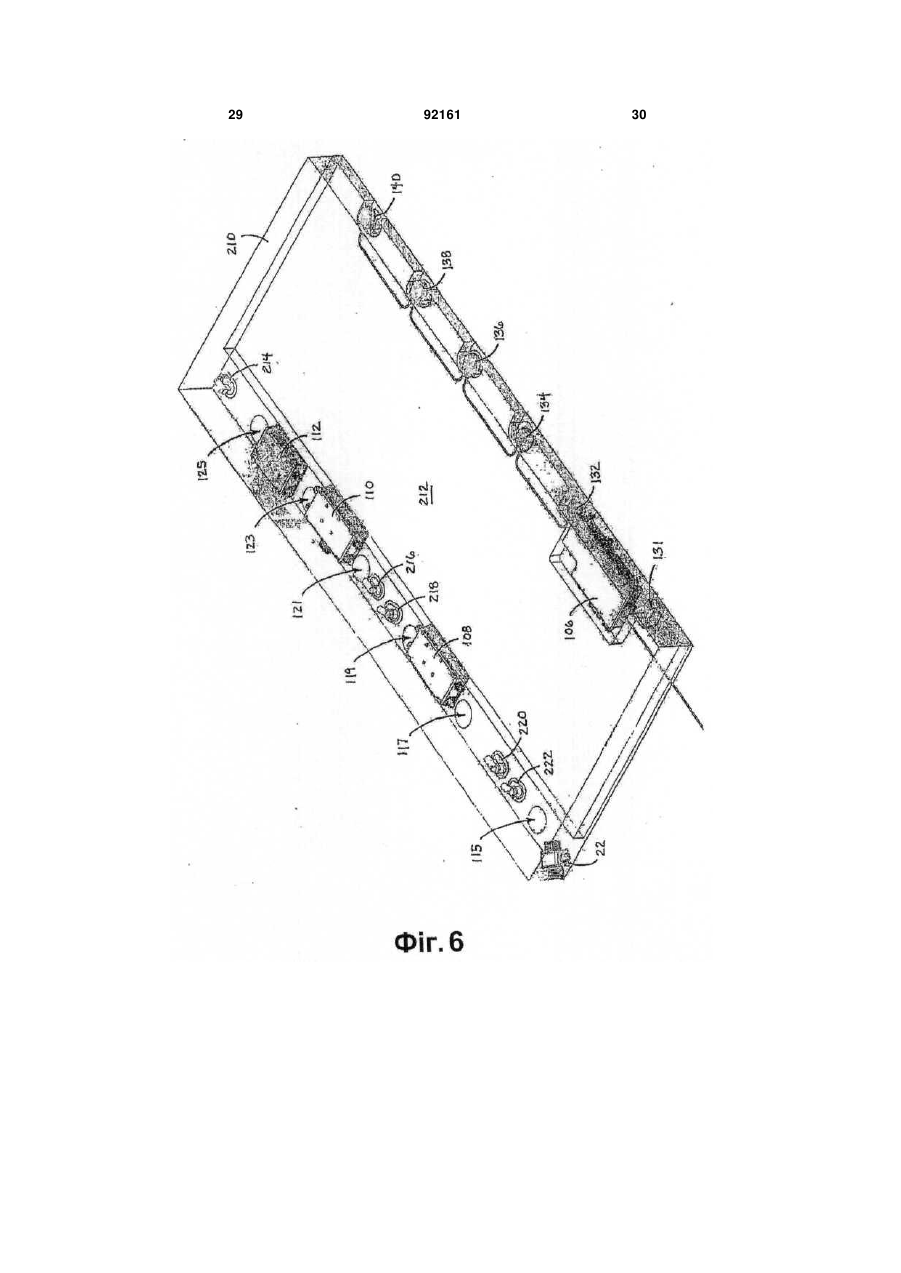
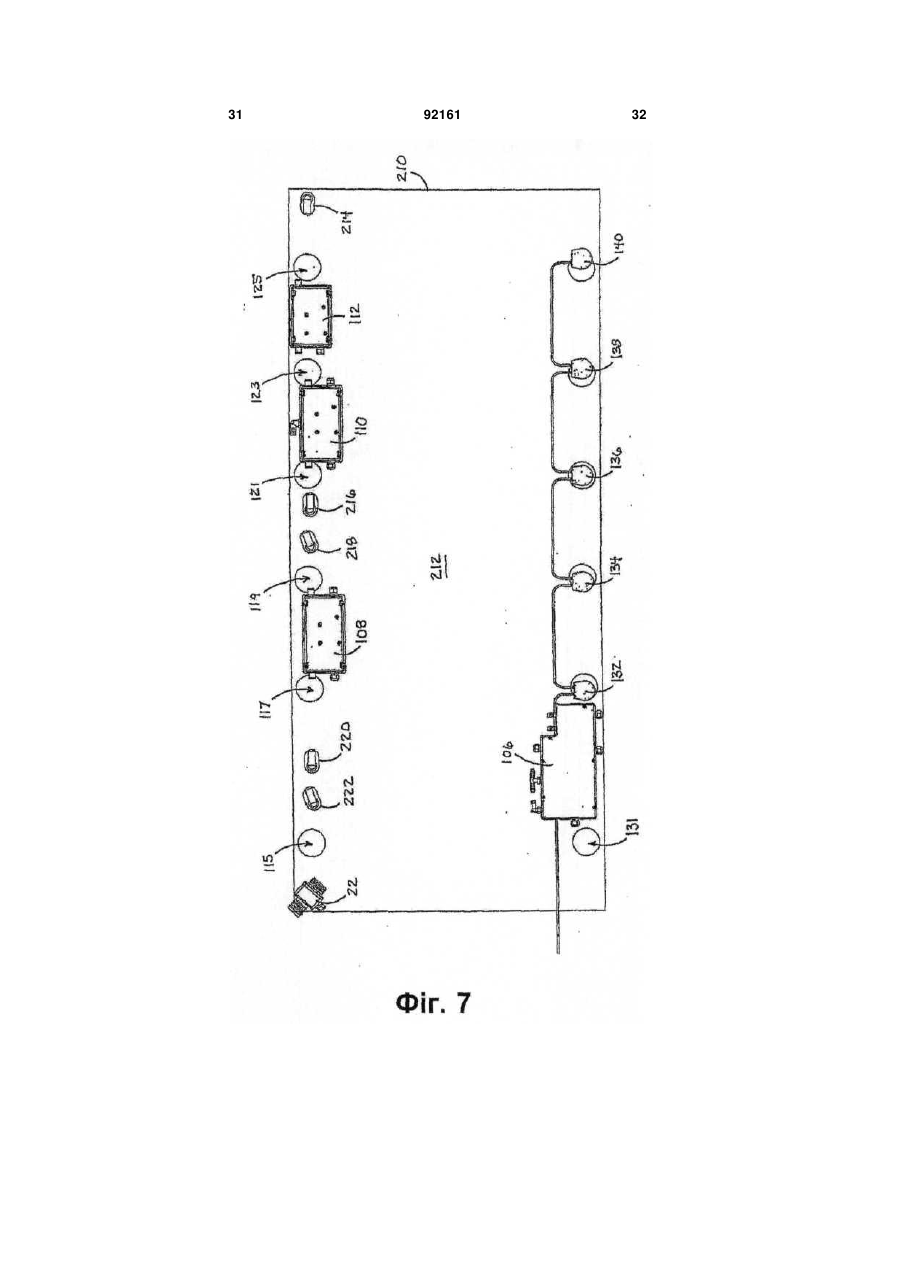
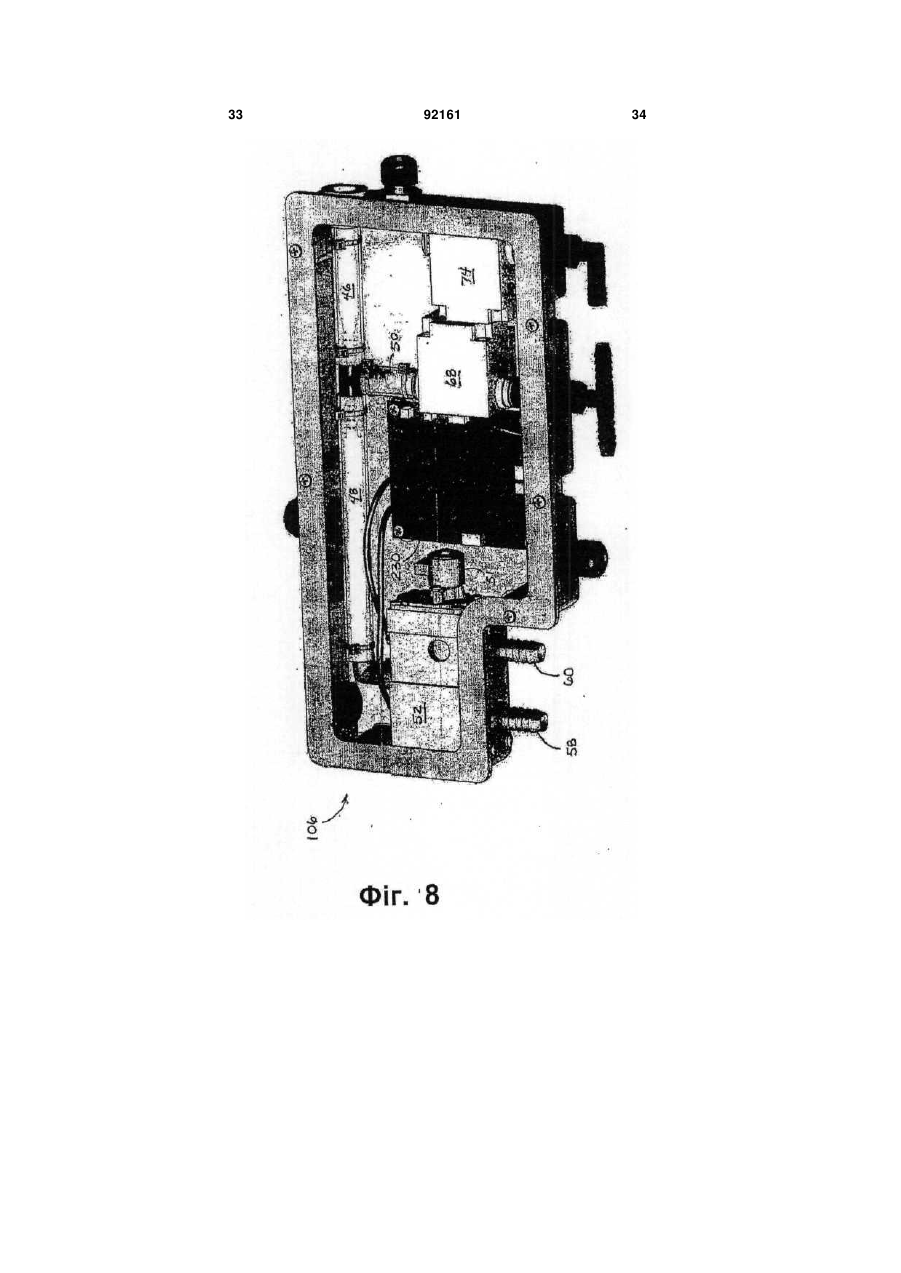
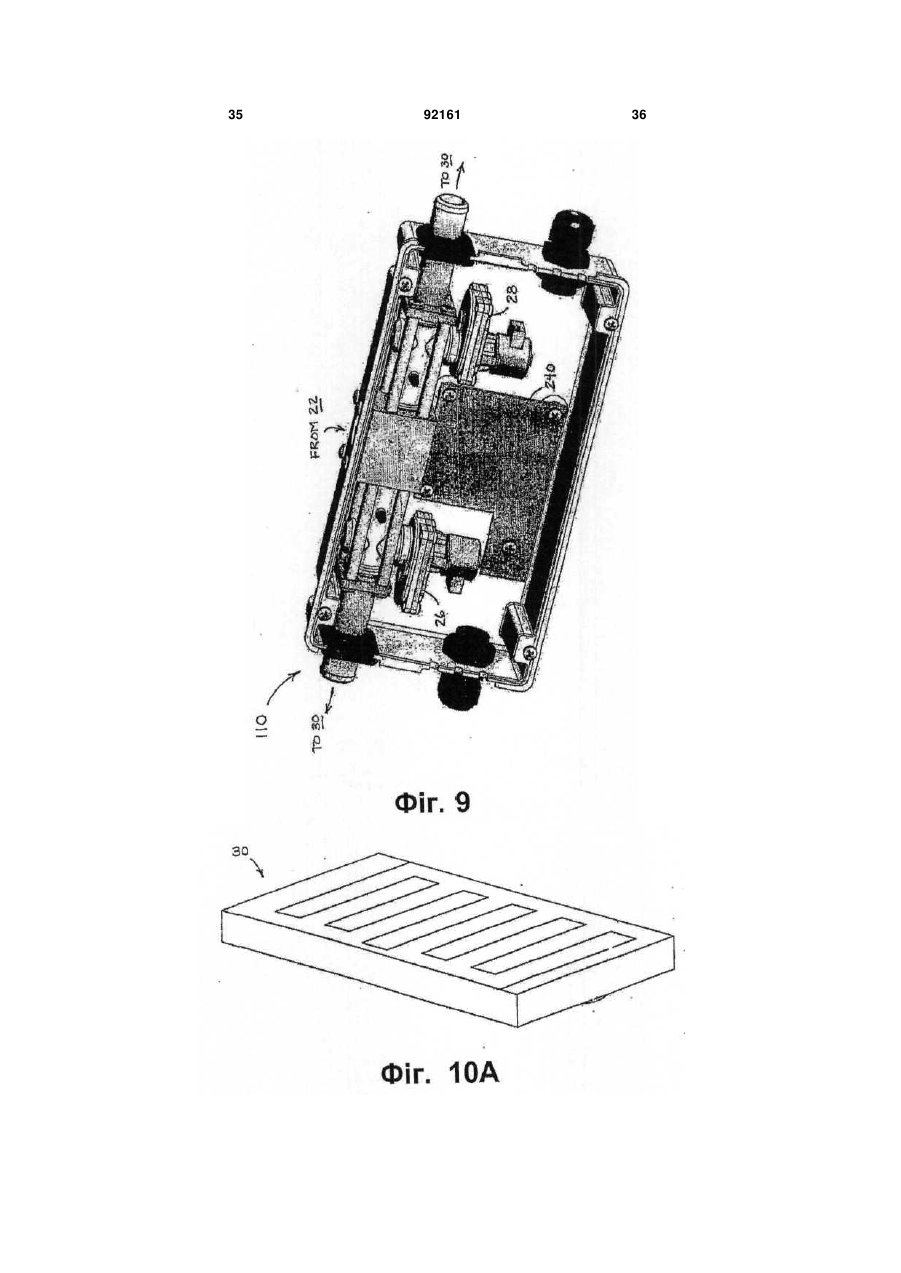
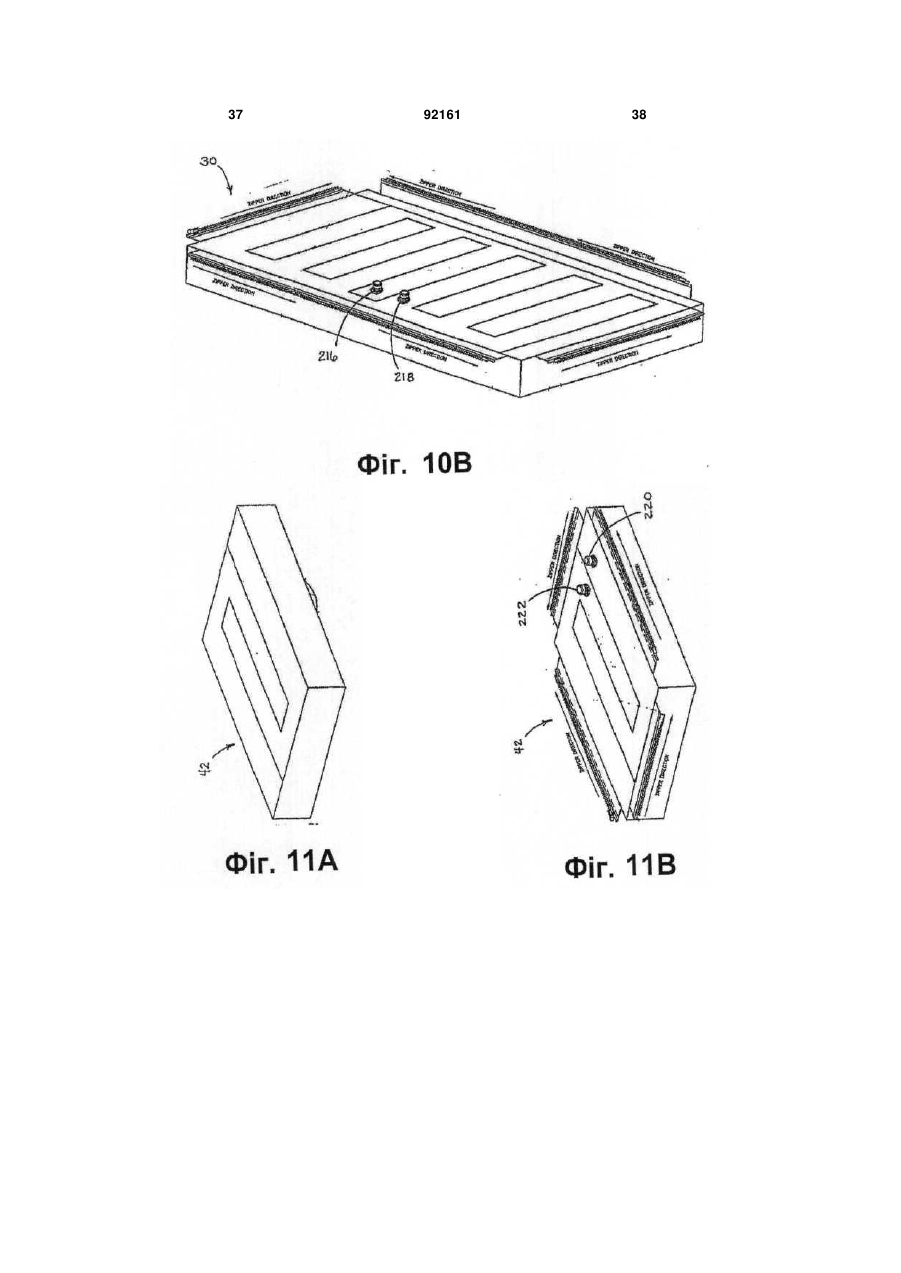
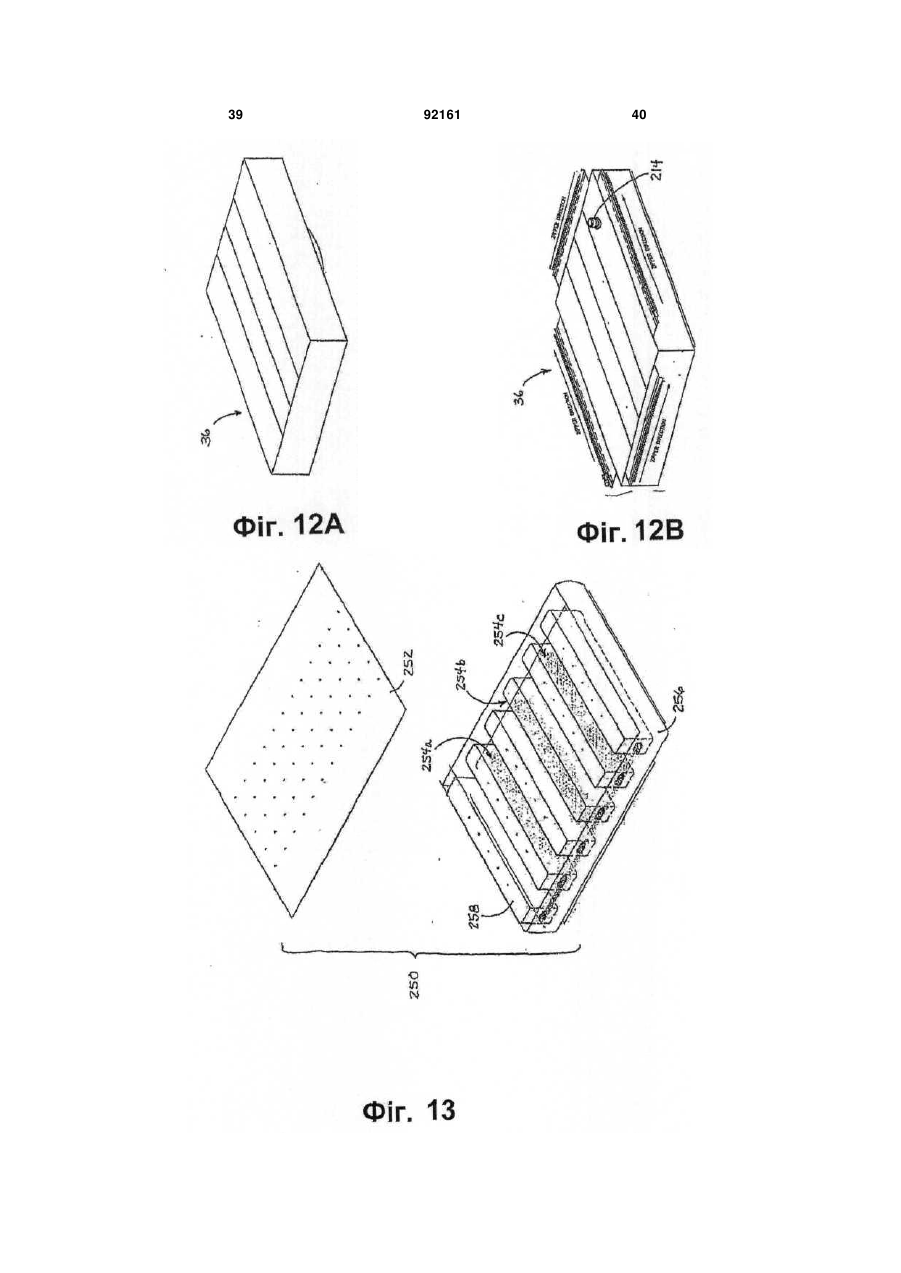
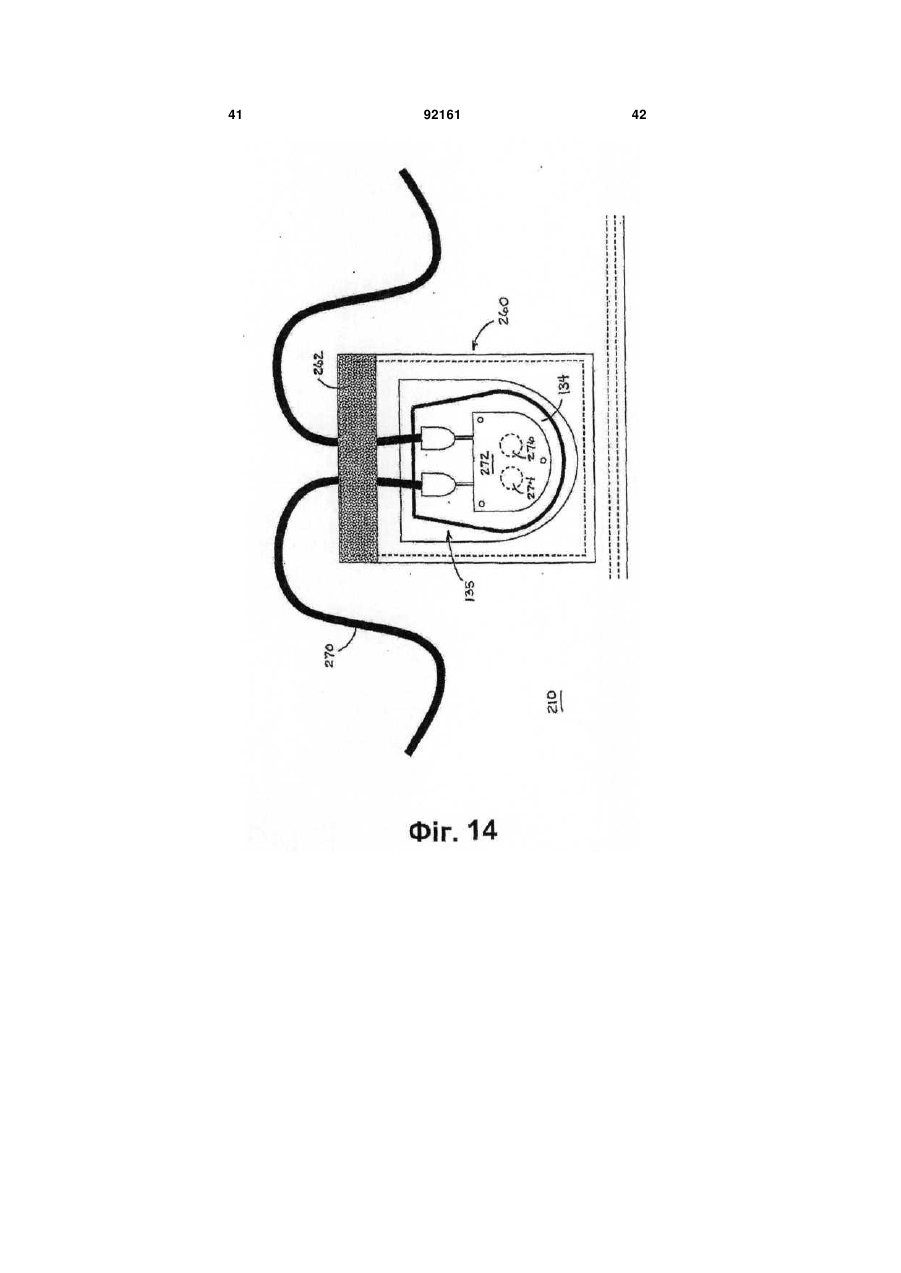
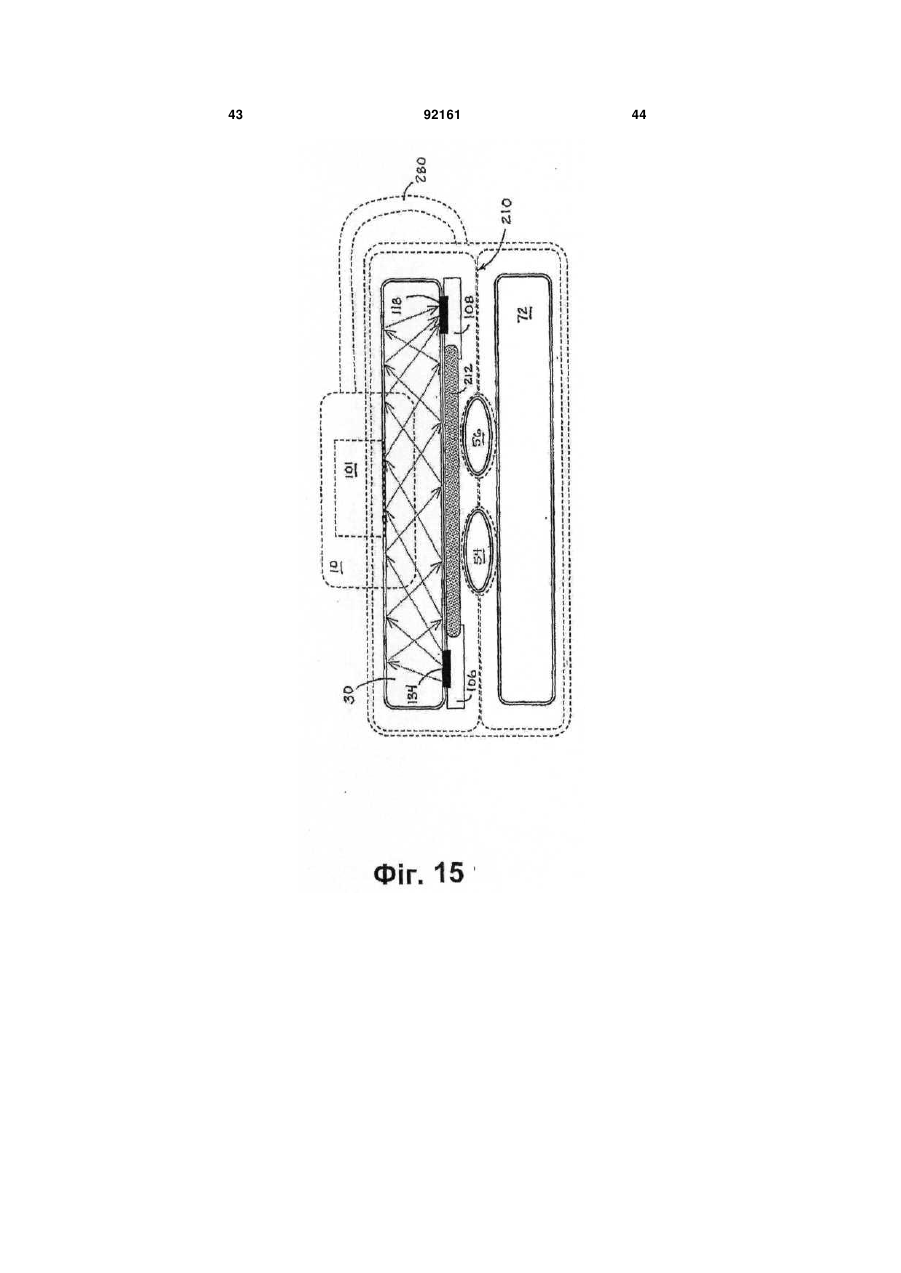
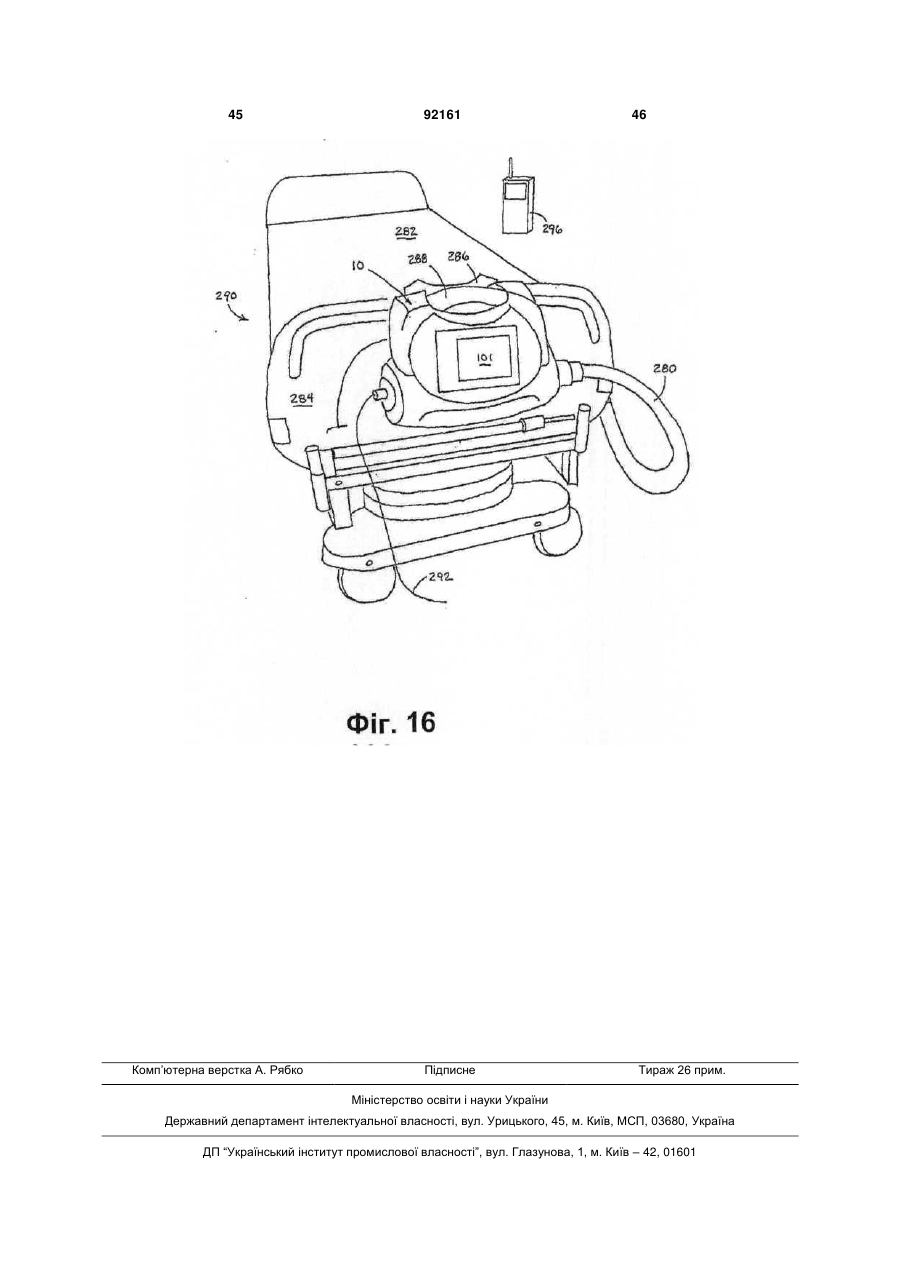
1. Система підтримання пацієнта з контролем цього підтримання, яка включає матрац, що містить множину надувних камер; множину передавачів, розташованих поблизу поверхні множини надувних камер; множину приймачів, розташованих поблизу поверхні множини надувних камер; і мережу, яка містить множину контролерів як вузлів локальної мережі (CAN), які мають зв'язок один з C2 2 (19) 1 3 єнт лягає у ліжко або залишає його, спираючись при цьому руками і ногами або ступнями, ліктями або колінами на матрац в одному місці. Взагалі системи контролю, що базуються лише на вимірюваннях тиск у надувному матраці не здатні відвернути "просідання" пацієнта у багатьох ситуаціях. Було зроблено ряд удосконалень, спрямованих на збереження форми матрацу, які включали збільшення кількості індивідуальних надуваних комірок; будь-яка з них може витримувати значну локальну силу і разом з суміжними комірками підтримувати пацієнта і відвертати "просідання". Вадою матраців з збільшеною кількістю індивідуальних комірок є необхідність індивідуально приєднувати кожну комірку до системи наповнення і вести індивідуальний моніторинг за допомогою вмонтованої контролюючої електроніки. Такі матраци звичайно мають широку і доволі складну систему повітряних і електричних каналів, що проходять уздовж і поперек матрацу і обслуговують індивідуально кожне наповнення, і системи контролю, пов'язані з надувною платформою. Це значно підвищує розміри, складність і вартість таких систем. У патенті US 6 560 804, включеному у даний документ посиланням, описано систему і спосіб визначення і моніторингу відстані між пацієнтом і певною точкою надуваного повітряного матрацу і керування подачею повітря, базоване на зміні цієї відстані Пристрої для моніторингу відстані пацієнта включають гетеродинний детектор близькості і чутливі до сили і освітлення датчики відстані. Хоча у патенті US 6 560 804 не йдеться про матрац, який має множину надувних камер, в іншому патенті US 4 745 647 описано саме такий матрац, що має, крім того, систему контролю, яка забезпечує автоматизоване регулювання робочими параметрами подання повітря і установлення положення клапанів надувних камер. Були запропоновані і інші рішення, спрямовані на підтримання повітряного надувного матрацу на певній висоті для забезпечення комфортності для пацієнта. Але жоден з відомих джерел інформації не дозволяє реалізувати високий рівень комфортності одночасно з високою надійністю оптимального регулювання підтримання форми надувного матрацу. Система згідно з винаходом включає декілька унікальних системних ознак і індивідуальні елементи, які разом утворюють загальну систему і дозволяють реалізувати спосіб підтримання форми наповненого повітрям матрацу, достатньої для забезпечення підтримання пацієнта і створення для нього комфортних умов. Хоча система згідно з винаходом є унікальною, існують додаткові індивідуальні компоненти, елементи і методології, пов'язані з цією, які також є унікальними і вирішують певні проблеми, пов'язані з існуючими рішеннями. Взагалі подальший опис стосується таких унікальних ознак і елементів винаходу: (1) Застосування інфрачервоного освітлення в індивідуальних камерах або групах камер. 92161 4 (2) Зміщене освітлення і моніторинг переміжних камер або секцій для зниження перехресних перешкод між інфрачервоними датчиками. (3) Застосування мережевої конфігурації розподілених мікропроцесорних контролерів з використанням мережевих протоколів для зниження кількості провідних з'єднань. (4) Застосування різних способів виготовлення подушок і балонів, наприклад, зшивання і/або радіочастотне зварювання для створення індивідуальних камер з спеціальних напівпрозорих, прозорих і відбивних для ІЧ матеріалів. (5) Застосування певних тканин типу Gortex(R) з низькою втратою повітря при виготовленні різних компонентів матрацної системи. (6) Загальна конструкція матрацу, що включає системи контролю, і методології, пов'язані з такими системами контролю з загальною здатністю поліпшувати збереження належного профілю наповнення. (7) Застосування ручного безпровідного пристрою зв'язку для передачі і прийому даних, програмування системи і завантаження інформації стосовно операцій системи. (8) Спеціальна конструкція компонентів подушки для голови, тіла і ніг, які забезпечують функціонування датчиків і компонентів контролера системи. У кресленнях: Фіг.1 - блок-схема потоків повітря, каналів і з'єднань, пов'язаних з реалізацією винаходу. Фіг.2 - блок-схема первинних з'єднань для потоку повітря і первинних з'єднань для електронних сигналів системи згідно з винаходом. Фіг.3 - детальна (на системному рівні) електронна схема згідно з блок-схемою матрацу і сигнальними компонентами датчиків згідно з винаходом. Фіг.4 - детальна (на рівні контролера) блоксхема електроніки контролера матрацу згідно з винаходом і пов'язаних з ними драйверів і входів. Фіг.5 - детальна (на рівні контролера) блоксхема електронних компонентів контролера крокового клапану (контроль подушки) згідно з винаходом. Фіг.6 - перспективний вигляд нижнього боку проміжного шару контролера матрацної системи згідно з винаходом. Фіг.7 - вигляд знизу нижнього боку проміжного шару контролера матрацної системи згідно з винаходом. Фіг.8 - детальний перспективний вигляд корпусу контролера системи згідно з винаходом. Фіг.9 - крокового клапану (подушка) системи згідно з винаходом. Фіг.10А, 10В - перспективні вигляди (згори і знизу) подушки для тіла у матраці системи згідно з винаходом. Фіг.11А, 11В - перспективні вигляди (згори і знизу) подушки для ніг матрацу системи згідно з винаходом. Фіг.12А, 12В - перспективні вигляди (згори і знизу) подушки для голови матрацу системи згідно з винаходом. 5 Фіг.13 - збільшений перспективний вигляд іншого втілення подушки для тіла у матраці системи згідно з винаходом, з розташуванням відбивних ІЧ поверхонь, Фіг.14 - детальний вигляд згори приймача/передавача (датчика/випромінювача) ІЧ світла як компонента системи згідно з винаходом. Фіг.15 - схематичний вигляд поперечного перетину матрацу, датчика і компонентів контролю системи згідно з винаходом. Фіг.16 - перспективний вигляд встановлення системи згідно з винаходом на рамі типового лікарняного ліжка. Загальний вигляд системи згідно з винаходом ілюструється схемою Фіг.1. Тут компоненти матрацу показані у відношенні до різних компонентів контролю системи і з зв'язками з ними. У різних втіленнях коробка надувального пристрою 10 може містити вентилятор 12 надувального пристрою, який має пиловий фільтр 14 на вхідному отворі і вихідний отвір з датчиком 16 тиску і проходить через нагрівальний вузол 18 перед надходженням у канали системи. Вихідна коробка надувального пристрою 10 приєднана через шлангове з'єднання 20, яка містить колектор повітряних каналів, а також електричні з'єднання (не показані) у тому ж з'єднувальному вузлі (детально описаному нижче). У різних втіленнях шлангове з'єднання 20 може бути цільним або бути багатокомпонентним з'єднанням і може включати такі компоненти, як пружини, защіпки тощо. Шлангове з'єднання 20 комплектоване і з'єднане з розподілювальним блоком 22, який розподіляє потік повітря від коробки надувального пристрою 10 через три окремі канали. Перший канал 24 приєднано до двох пропорційних контрольних клапанів 26 і 28, пов'язаних з подушкою 20 для тіла. Другий канал 32 приєднано до пропорційного контрольного клапану 34, пов'язаного з подушкою 36 для голови, а також до пропорційних контрольних клапанів 38 і 40, пов'язаних з подушкою 42 для ніг. Кожний з згаданих пропорційних контрольних клапанів приєднано до відповідної подушки швидкороз'єднувальним з'єднанням 44. Подушка 36 для голови одиночним камерним вузлом (наприклад, одною надувною камерою), описаним нижче. Ця одиночна камера з'єднана швидкороз'єднувальним з'єднанням 44 з пропорційним контрольним клапаном 34. Подушка 30 для тіла є багатокамерним вузлом (наприклад, двома надувними камерами) з переміжними камерами для переміжування герметизованих повітряних камер з терапевтичними цілями. Кожна з двох окремих камер приєднана до відповідних пропорційних контрольних клапанів 26 і 28. Подушка 42 для ніг є багатокамерним вузлом (наприклад, двома надувними камерами) такої ж структури, як і подушка 30 для тіла і має дві переміжні камери, індивідуально приєднані швидкороз'єднувальним з'єднанням 44 до їх відповідних пропорційних контрольних клапанів 38 і 40. Конструкції компонентів подушки системи згідно з винаходом детально розглядаються нижче. Контроль тиску повітря у подушці 36 для голови, подушці 30 для тіла і подушці 42 для ніг, опи 92161 6 саний нижче, є частиною основної структури і функцій винаходу. Взагалі ці три компоненти підтримуються у наповненому стані електронним контролем пропорційних контрольних клапанів і/або контролем швидкості роботи надувального пристрою під керуванням мікропроцесорів або мікроконтролерів, які містять придатні для виконання комп'ютером інструкції, наприклад, інструкції програми і/або алгоритми, які визначають тиск для терапевтичного наповнення і режими, і, крім того, вони приєднані в один або інший спосіб до цифрової сигнальної мережі. У різних втіленнях може бути передбачений третій повітряний канал. У втіленнях з третім повітряним каналом, наприклад, у втіленні Фіг.3, повітряний канал відходить від розподілювального блоку 22 для проведення повітря до балонів, пов'язаних з матрацною системою винаходу. Повітряний канал 46 розділяється на два канали 48 і 50. Канал 48 проходить до напрямного контрольного розподілювача 52 з кроковим приводом, який переміжно наповнює і випорожнює балони 54 і 56. Напрямний контрольний розподілювач 52 приводиться кроковим мотором 51. Повітря розподіляється від контрольного розподілювача 52 у два канали 58 і 60, які проходять через ручний блок 62 вивільнення CPR, який знаходиться під моніторингом перемикача CPR 61. У кожному з каналів 58 і 60 встановлено датчики тиску 64 і 66 і швидкороз'єднувальне з'єднання 44, де вони проходять у їх відповідні повертальні балони 54 і 56. Наповнення повертальних балонів 54 і 56 виконується переміжно і контролюється напрямним контрольним розподілювачем 52 для наповнення одного повертального балону і вивільнення другого повертального балону таким чином, щоб повертати пацієнта на один або інший бік. Орієнтація повертальних балонів уздовж матрацної системи (див. нижче) уможливлює процедуру повертання. У різних втіленнях (Фіг.1) повітряний канал 50 відходячи від розподілювального блоку 22 через повітряний канал 46, може пройти через привідний соленоїд 68 і потім через блок 62 вивільнення CPR. Від блоку 62 повітряний канал 50 проходить через датчик тиску 70 і через швидкороз'єднувальне з'єднання 44, після чого слугує для наповнення балону 72 MRS (системи підтримання стану матрацу). Балон 72 MRS може отримувати вихід в атмосферу за допомогою соленоїду 74. У різних втіленнях можуть бути використані пінні подушки або матраци, які можуть заміняти MRS 72 і пов'язані з нею компоненти. У таких втіленнях такі компоненти, як, наприклад, повітряний канал 50 можуть бути вилучені. Коробка 10 надувального пристрою, описана вище, вбудована у користувацький інтерфейсний вузол, встановлений на ножній частині ліжка, на яке укладають матрацну систему. Цей інтерфейсний вузол містить частину електроніки, пов'язану з програмуванням і роботою системи, наприклад, вузли контролера локальної мережі (CAN) і інші схеми. Фіг.2 ілюструє компоненти контролю, пов'язані з системою винаходу і частково повторює загальну схему пневматики, ілюстровану Фіг.1. На Фіг.2, коробка 10 надувального пристрою 10 має 7 вентилятор 12 надувального пристрою, який (через декілька інших приєднаних колекторів, не показаних на схемі) слугує для забезпечення повітря для наповнення лівого повертального балону 54, правого повертального балону 56, подушки 42 для ніг, подушки 30 для тіла, подушки 36 для голови і балону 72 MRS. Електричні з'єднання, показані у коробці 10 надувального пристрою, включають подачу електричної потужності для нагрівача 18, який слугує для підігрівання повітря, яке виходить від вентилятора 12 надувального пристрою, а також з'єднання з пристроями 101 входу/виходу, наприклад, з користувацьким інтерфейсом даних (UDI), графічним користувацьким інтерфейсом (GUI), який, між іншим, у бажаному втіленні включає дисплей LCD з сенсорним екраном. В іншому варіанті, електричні/електронні з'єднання від користувацького інтерфейсу 100 включають силове з'єднання 102 і комунікаційні з'єднання 104. Ці електричні/електронні з'єднання здійснюються через той ж шланговий з'єднувальний вузол 20, згаданий вище, і, таким чином, утворюють електричні/електронні з'єднання від коробки надувального пристрою до компонентів матрацу. Матрацний вузол 105 має контролер 106 матрацу, який отримує живлення і сигнали від користувацького інтерфейсу 100. Ті ж силові і комунікаційні лінії обслуговують контролери крокових клапанів, пов'язаних з кожної з трьох подушок матрацної системи винаходу. Ці контролери встановлені як "вузли мережі" і включають контролер 108 крокового клапану (пов'язаного з подушкою 42 для ніг), контролер 110 крокового клапану (пов'язаний з подушкою 30 для тіла) і контролер 112 крокового клапану (пов'язаного з подушкою 36 для голови). Кожний з цих контролерів крокових клапанів має прямий зв'язок з обома приймачами інфрачервоного світла, пов'язаними з подушками, до яких вони приєднані, а також з контрольними клапанами прямого наповнення відповідної подушки. Контролер 108 крокового клапану, наприклад, приймає сигнал від інфрачервоного приймача 114 і, отже, контролює клапани 38 і 40, підтримуючи належне наповнення подушки 42 для ніг. Подібним чином контролер 110 крокового клапану має зв'язок з інфрачервоними приймачами 116, 118, 120 і 122 і з контрольними клапанами 26 і 28, пов'язаними з подушкою 30 для тіла. Контролер 112 крокового клапану має зв'язок з інфрачервоним приймачем 124 і контрольним клапаном 34, пов'язаними з подушкою 36 для голови. Мережева структура цієї сукупності контролерів дозволяє приєднувати додаткові контролери через з'єднання 113, яке може бути розташоване у різних місцях, включаючи контролери 108, 110 і 112 крокових клапанів, якщо цього потребують інші структура і функції подушок. Лівий повертальний балон 54 і правий повертальний балон 56 (Фіг.2) контролюються контролером 106 матрацу через виконання програмованих операцій напрямним контрольним розподілювачем 52, показаним у розділеній конфігурації (Фіг.2). Наповнення балону 72 MRS контролюється контролером 106 матрацу через програмовані операції MRS фіксуючого соленоїду 68 92161 8 MRS і вентиляційного соленоїду 74 MRS. У бажаному втіленні наповнення балону MRS можна варіювати для отримання жорсткості усієї матрацної системи, а повертальні балони можна варіювати для отримання повертальних функцій, описаних вище. Як уже відзначалось, у деяких втіленнях можуть бути використані пінні подушки або матраци, і у таких втіленнях контролер матрацу не використовується. У різних втіленнях контролер матрацу може мати декілька різних конфігурацій. Наприклад, контролер матрацу може включати вентиляційний соленоїд MRS у втіленнях, де використовується балон MRS, згаданий вище. Фіг.3 детально ілюструє мережу контролерів контрольного проміжного шару для матрацної системи винаходу. Контролер 106 матрацу має прямий контрольний зв'язок з кроковим напрямним контрольним розподілювачем 52, пов'язаним з повертальними балонами, з вентиляційним соленоїдом 74 MRS і фіксуючим соленоїдом 68 MRS. Контролер 106 матрацу живить (і освітлює) кожний з інфрачервоних передавачів (6 у бажаному втіленні) 130, 132, 134, 136, 138 і 140. Ці ІЧ передавачі у бажаному втіленні є ІЧ світлодіодами (LED), які працюють узгоджено з частотою сигналів 3кГц. Припустимими є і інші частоти. Контролер 106 матрацу приймає вхідний сигнал даних від входу 142 датчика кута, входу 144 датчика температури і входів датчиків 146 положення бічних рейок. Ручний перемикач 148 CPR з'єднано з блоком 62 вивільнення CPR, згаданим вище. Упресоване з'єднання 150 приймає пневматичний тиск повітря, виміряний датчиком 16 тиску. У різних втіленнях контролер 106 матрацу утворює базовий вузол мережі з'єднань 152, яка включає мережу сигнальних прийомних і передавальних ліній, а також лінії живлення і зворотні лінії. Ця мережа 152 з'єднань розподілена між контролерами крокових клапанів, згаданих вище, як вузлами 108, 110 і 112 мережі. Ці мікроконтролери, діючи як вузли локальної мережі, індивідуально приймають вхідні сигнали від інфрачервоних приймачів 114,116, 118,120, 122 і 124, пов'язаних з подушкою 42 для ніг, подушкою 30 для тіла і подушкою 36 для голови, відповідно. У свою чергу кожний з цих контролерів працює і контролює крокові мотори, з'єднані з пропорційними контрольними клапанами, описаними вище. Ці крокові мотори включають кроковий мотор 126, пов'язаний з контрольним клапаном 40 подушки 42 для ніг, кроковий мотор 128, пов'язаний з контрольним клапаном 38 подушки 42 для ніг, кроковий мотор 130, пов'язаний з контрольним клапаном 28 подушки 30 для тіла, кроковий мотор 132, пов'язаний з контрольним клапаном 26 подушки 30 для тіла і кроковий мотор 134, пов'язаний з контрольним клапаном 34 подушки 36 для голови. Кожний з контролерів крокових клапанів 108,110 і 112 є програмованим контролером, здатним незалежно підтримувати належне наповнення їх відповідних подушок без допомоги мережі з'єднань з контролером 106 матрацу або зворотних з'єднань з вузлом 100 користувацького інтерфейсу. Кожний контролер крокового клапану діє як 9 вузол мережі згідно з протоколом CAN (контролера локальної мережі), описаним нижче. Ця мережева структура поліпшує функціонування системи у цілому і забезпечує ефективне підтримання належного наповнення компонентів матрацної системи, навіть в умовах рухів пацієнта, які в іншому разі можуть призвести до "просідання" крізь подушки матрацу. Кожний з мікроконтролерів у бажаному втіленні винаходу може бути мікроконтролером ІС типу H8/3687N або еквівалентним. У різних втіленнях мережева структура може включати різні вузли, конфігурації і протоколи CAN. У деяких втіленнях кожний з контролерів крокових клапанів і інших контролерів (наприклад, контролер матрацу і різні контролери клапанів) можуть бути однозначно ідентифіковані як вузли мережі адресними комунікаційними перемикачами. В інших втіленнях вузли можуть мати динамічну адресацію. У деяких втіленнях вузли CAN можуть бути з'єднані у певному порядку і мати адресацію, що відповідає цьому порядку. Наприклад, в одному з втілень вузли CAN можуть бути з'єднані у такому порядку: GUI (Супервізор Мережі), Контролер Надувального пристрою (ВС), Контролер матрацу (МС), Контролер ножного Клапану (FVC), Контролер Клапану тіла (BVC) і Контролер головного Клапану (HVC). Зрозуміло, що різні контролери можуть бути схожими і виконувати однакові або схожі функції і можуть відрізнятись від описаних вище. Наприклад, контролер надувального пристрою може бути будь-яким контролером, що контролює витрату повітря у потоці від вентилятора надувального пристрою або іншого джерела повітря під тиском. У різних втіленнях динамічна адресація може починатись з широкомовного повідомлення, надісланого у мережі вузлом GUI з вимогою до усіх вузлів приготуватись до динамічної адресації. Коли вузол приймає це повідомлення, він відповідає повідомленням, що ідентифікує цей вузол числом, яке надається кожному типу. Наприклад, у різних втіленнях вузол ВС може мати ідентифікаційний номер 1, вузол МС - номер 2 і вузол VC - номер 3. Вузол GUI призначає мережеву адресу кожному вузлу, що надіслав ідентифікаційний номер. У деяких втіленнях для динамічної адресації може бути застосована послідовність подачі живлення до вузлів. Наприклад, у деяких втіленнях з початком динамічної адресації живлення подається до вузлів GUI, ВС, МС і FVC. Після подачі живлення і призначення адрес до вузлів ВС, МС, і FVC вузол FVC подає живлення до вузла BVC, який є єдиним вузлом - контролером клапану (VC) у мережі без адреси. GUI може відрізняти його від інших вузлів VC. Після отримання адреси вузол BVC надає живлення вузлу HVC, і тепер цей вузол стає єдиним вузлом VC у мережі без. Після отримання адреси вузлом VC мережа готова для нормальної роботи. Фіг.4 містить деталі контролера 106 матрацу з мікроконтролером і його з'єднаннями з різними входами і виходами, пов'язаними з контролером, включаючи такі з'єднання CPR перемикачами 148, як входи O/G, з'єднання 142 датчика кута, з'єднання 144 датчика температури, з'єднання 150 датчика пневматичного тиску і входи 146 датчика бічної 92161 10 рейки. Контролер матрацу на схемі Фіг.4 також має регулятор напруги 160 для живлення мікроконтролера і кожного з допоміжних компонентів. Виходи мікроконтролера 106 включають вихід 3кГц від драйвера 162, який живить інфрачервоні передавачі, як це відзначалось вище. Мікроконтролер також надає вихідні сигнали драйверів 164,166 контрольного соленоїду, які безпосередньо керують вентилятором MRS і фіксуючими соленоїдами, відповідно. Мікроконтролер 106 також керує драйвером 168 крокового мотору, що контролює кроковий напрямний контрольний розподілювач, який наповнює і вивільняє повертальні балони. Як уже відзначалось, мікроконтролер 106 має зв'язок і утворює вузол у CAN, а контролер матрацу як вузол CAN підтримує схемний протокол 170 мережі і трансивер 172 CAN. У різних втіленнях кроковий контролер може мати декілька різних конфігурацій. Наприклад, у деяких втіленнях кроковий контролер може включати один або більше схем крокового драйвера. В інших втіленнях кроковий контролер може включати схеми для фільтрування, буферування і підсилення. У деяких втіленнях крокового контролера такі схеми може бути включені або відсутні, згідно з однією або декількома бажаними функціями контролера. У втіленні, ілюстрованому Фіг.5, наведено схему типового контролера крокового клапану. Ця схема є типовим прикладом одного з трьох контролерів крокового клапану, пов'язаних розташуванням з кожною з трьох подушок у бажаному втіленні матрацної системи згідно з винаходом. Контролер 110 крокового клапану, пов'язаний з подушкою для тіла використано у цьому прикладі тому, що він використовує 4 вхідні інформаційні сигнали від ІЧ датчиків. Входи до мікроконтролера 110 включають буферовані і фільтровані вхідні сигнали від кожного з показаних інфрачервоних датчиків. Схеми буферування/фільтрування 180, 182, 184, 186 кондиціонують аналогові сигнали від окремих ІЧ датчиків для належного моніторингу мікроконтролером. Контролер 110 крокового клапану також має регулятор напруги 202 для живлення компонентів схем контролера. Виходи мікроконтролера 110 (яку кожного контролера крокового клапану) і включають вихідні сигнали для схем крокових драйверів 188, 90 для двох пропорційних контрольних клапанів, що працюють під керуванням певного контролера крокового клапану. Робота цих драйверів забезпечується системами 192, 194 моніторингу струму, які утворюють для мікроконтролера прямий зворотний зв'язок стосовно стану цих двох пропорційних контрольних клапанів. Як уже відзначалось, кожний мікроконтролер має схему 196 конфігурації адреси, яка дозволяє відрізнити його від інших вузлів контролю у мережі. Кожна схема мікроконтролера також включає схему 198 протоколу і трансиверну схему 200 CAN, які забезпечують зв'язок у мережі. CAN (локальна мережа контролерів) є послідовною шинною системою, яка спочатку була розроблена для застосування в автоматиці на початку 80-х p.p. Протокол CAN був стандартизований (міжнародно) у 1993р. як ISO 11898-1 і включає 11 рівень каналу даних серед 7 рівнів еталонного ISO/OSI. CAN, яку можна придбати від багатьох виробників схемного забезпечення, надає два комунікаційні обслуговування: надсилання (передача кадру даних) і вимога повідомлень (дистанційна вимога передачі, RTR). Всі інші послуги, наприклад, сигналізація про помилки і автоматична повторна передача хибних кадрів, є прозорими для користувача, тобто схеми CAN автоматично виконують ці послуги без спеціального програмування. Контролер CAN може бути порівняний до принтера і, CAN використовує, як у даному застосуванні, визначення мови/граматики і слів/словника для зв'язку. Однак, CAN забезпечує багаторівневу ієрархію, яка дозволяю побудувати інтелектуальні і надлишкові системи, що, як уже відзначалось, є дуже важливим для реалізації підтримання наповнення згідно з винаходом. Якщо один з вузлів мережі є дефектним, мережа все ж продовжує функціонування. CAN також забезпечує широкомовний зв'язок, при якому надсилач інформації може передати до усіх пристроїв на шині одночасно. Отже, програмування через користувацький інтерфейс згідно з винаходом може бути розподілене до кожного з контролерних вузлів у CAN таким чином, що може викликати зміну режимів в усій системі. Всі приймальні пристрої читають це повідомлення і вирішують, чи воно стосується їх. Цим забезпечується цілісність даних, оскільки всі пристрої системи використовують однакову інформацію. CAN також забезпечує досконалі механізми виявлення помилок і повторної передачі хибних повідомлень. Фіг.6, 7 ілюструють опис фізичного розташування різних компонентів контролю, визначених і розглянутих вище. На Фіг.6, 7 показано у перспективному вигляді і у плані, відповідно, нижній бік контрольного проміжного шару, вбудованого у матрацну систему винаходу. Тут показано положення позначених компонентів згідно з тим, як вони виглядають на перевернутій матрацній системі без балону MRS і повертальних балонів (ця загальна структура розглядається більш детально нижче (Фіг.15)). Контролер проміжного шару має корпус 210 з гнучкими стінками, який оточує пінну серцевину 212, у якій розташовано різні компоненти контролю згідно з винаходом. Контролер 106 матрацу розташований, як це показано, як і контролери крокових клапанів 108, 110 і 112. Контролери крокових клапанів розташовано поблизу подушки, яку вони обслуговують. Всі, за винятком одного, ІЧ передавачі показані на їх місцях узгоджено з'єднаними. ІЧ передавачі 132, 134, 136, 138 і 140 показані на Фіг.6, 7 на їх місцях. ІЧ передавач 130 видалено, щоб показати розташування вікна 131 цього передавача для забезпечення розташування цього передавача по один бік контролера 106. На протилежному боці контрольного проміжного шару розташовано ІЧ датчики, або, точніше, вікна цих датчиків, відкриті в індивідуальні подушки, як це описано нижче. Вікна датчиків 115, 117,119, 121,123 і 125 показано на Фіг.6, 7 пов'язаними з їх відповідними подушками для ніг, тіла і голови. З відповідними подушками пов'язані також 92161 12 вхідне з'єднання 214 для потоку повітря (пов'язане з подушкою для голови), з'єднання 216 і 218 (пов'язані з подушками для тіла) і з'єднання 220 і 222 (пов'язані з подушкою для ніг). Колектор 22 показаний у положенні для прийому великого шлангу для цього потоку (не показаного) і для розділення і розподілення потоку повітря у три менші канали з подальшим розподіленням у подушки і компоненти матрацу. На Фіг.6, 7 всі канали для потоку повітря не показано для спрощення. Від колектора 22 два канали для потоку повітря з'єднуються з контролерами крокових клапанів 108, 110 і 112 для забезпечення необхідного потоку повітря для подушок матрацу. Третій повітряний канал з'єднує колектор 22 з контролером 106 матрацу, де необхідний потік повітря забезпечує функціонування повертальних балонів і первинного балон MRS, як це було описано. Для спрощення на Фіг.6, 7 не зображено більшу частину електричних/електронних з'єднань між різними компонентами схем контролю. Виняткомє 2-провідне з'єднання, що з'єднує кожний з ІЧ передавачів разом уздовж однієї кромки проміжного шару. У нормальному розташуванні шостий ІЧ передавач 130 розташовується над вікном 131 і також з'єднується 2-провідним ланцюгом. Додаткові електричні/електронні з'єднання між компонентами наведено на Фіг.2. Крім того, провідна мереж з'єднань між корпусами контролерів наведені і описані разом з Фіг.3-5. Фіг.8 ілюструє контролер 106 матрацу і його корпус, в якому розміщено різні електронні і електромеханічні засоби контролю, включаючи контролер оболонки матрацу. Потік повітря проходить каналом 46 у канал 48 і канал 50. Канал 48 подає потік повітря до крокового напрямного контрольного розподілювача 52, який приводиться кроковим мотором 51. Цим забезпечується постачання повітря через канальні з'єднання 58 і 60 для повертальних балонів. Канал 50 подає потік повітря до соленоїдного клапану 68, який спрямовує потік повітря з корпусу до балону MRS і до вентилятора через соленоїдний клапан 74. Кожний з клапанів 68, 74, а також напрямний контрольний розподілювач 52 електрично з'єднані з платою ПК 230, на якій змонтовано схеми контролера, описані вище (для контролера матрацу). Інтегральний мікроконтролер, також розташований на платі 230, утворює ядро контролера. Електричні/електронні з'єднання, згадані вище, не показано на Фіг.8, але вони проходять у корпус через порти, показані на боках корпусу, деякі з яких можуть бути водонепроникними. Кришка (не показана) разом з стінками захищає обладнання від рідини. Фіг.9 ілюструє типовий контролер крокових клапанів, який працює разом з контролером матрацу і забезпечує регульований потік повітря до подушок матрацу, як це було описано вище. Контролер 110 крокового клапану, який обслуговує подушку 30 для тіла системи, показано як приклад. Інші два контролери крокових клапанів є або ідентичними за структурою або включають половину операційних компонентів ілюстрованого прикладу. Показані пропорційні контрольні клапани 26 і 28, 13 що приводяться кроковим мотором. На одному боці корпусу ("від 22") показано потік повітря до вузла від колектора 22. Від контрольних клапанів повітря проходить до подушки 30 для тіла через з'єднання на протилежних боках корпусу. Кожний з контрольних клапанів 26 і 28 електрично з'єднаний з платою ПК 240, на якій змонтовано схеми контролера. Електричні/електронні з'єднання (провідні) у корпусі, вхідні у корпус і вихідні з корпусу, не показані. Операції контролю клапану включають моніторинг частоти відкриття і закриття клапану для зниження шуму клапану при роботі системи. Крім того, контроль крокових моторів включає моніторинг струму для перевірки сигналу контролю на помилки. Плати трьох контролерів крокового клапану є, по суті, однаковими і розрізняються у мережі за їх динамічними адресами, призначеними на початку операцій. Розподілена операційна структура мережі системи дозволяє послідовно подавати живлення до індивідуальних вузлів/контролерів системи і активувати їх. Це значно спрощує початкові операції і обслуговування системи. Діагностичний режим операцій також сприяє цим аспектам розподіленої мережі. Фіг.10-13 ілюструють конструкцію і конфігурацію подушок системи відновлення стану матрацу згідно з винаходом. На Фіг.10А і 10В показано загальну конструкцію подушки 30 для тіла системи винаходу. Як показано на Фіг.1, подушка для тіла побудована з двох переміжних камер для забезпечення переміжних пульсацій потоку повітря, що входить у подушки, які є терапевтичним заходом для пацієнтів. Ці камери побудовані з коробоподібних паралельних каналів, що проходять поперек подушки. Фіг.10А містить вигляд згори подушки 30 для тіла, і шви на тканині дозволяють бачити конфігурацію цих переміжних каналів. Потік повітря, що входить через з'єднання 216 і 218, показано на Фіг.10В (вигляд знизу), де вони урівнюються і з'єднуються з їх відповідними з'єднаннями на контрольному проміжному шарі, описаному вище. Подушка 30 для тіла побудована з декількох тканин з різними показниками високої і/або низької втрати повітря, які забезпечують "вихід" для повітря у повітряній системі наповнення, як це звичайно роблять у таких конструкціях. Подушку звичайно виготовляють зшиванням "навиворіт" з подальшим вивертанням на "правий бік", хоча спочатку частини шва є відкритими (Фіг.10А). Подушки матрацу згідно з винаходом можуть бути зшиті, як показано вище або можуть бути з'єднані відомим методом радіочастотного зварювання. Виготовлену подушку встановлюють у належному положенні у зиперним (або подібним) з'єднанням (типу "молнія") з відповідним компонентом такого з'єднання на матеріалі корпусу системи. Фіг.11А і 11В ілюструють конструкцію подушки 42 для ніг, яка, як і подушка 30 для тіла, складається з двох переміжних камер. Потік повітря у з'єднаннях 220 і 222 показано на Фіг.11В (вигляд знизу). Спосіб виготовлення подушки 42 для ніг не відрізняється від способу виготовлення подушки 30 для тіла. Фіг.12А і 12В ілюструють конструкцію подушки 36 для голови, яка відрізняється від конструкції 92161 14 подушки 30 для тіла і подушки 42 для ніг. Подушка 36 для голови не призначена для терапії під тиском з переміженням камер і тому побудована як єдина камера з одним входом 214 для потоку повітря (Фіг.12В, вигляд знизу). У подушку вшито (або вбудовано в інший спосіб) паралельні "канали" (Фіг.12А) для підтримання плоскої форми подушки, але між цими каналами проходить потік повітря для підтримання цілісності внутрішньої камери. Фіг.13 ілюструє один з варіантів конструкції внутрішності подушки, яка утворює єдине ціле з поверхнями, здатними відбивати ІЧ світло для вимірювань ІЧ освітлення ІЧ датчиками подушки. У цьому прикладі конструкції подушки 250 складається з коробоподібної тканинної оболонки 256 і верхньої поверхні 252, яка показана відділеною для більшої ясності. Важливою особливістю цієї конструкції є наявність поверхонь 254а, 254b і 254с, здатних відбивати ІЧ світло і розташованих на внутрішніх бічних поверхнях коробоподібних каналів, сформованих усередині подушки. Завдяки цьому окремі частини подушки стають фокусом ІЧ опромінювання (це дозволяє системі краще ідентифікувати частину подушки, яка може потребувати більшого наповнення) і допомагають відвернути взаємні перешкоди між опроміненими ІЧ секціями подушки. Ці особливості у сполученні з узгодженим у часі об'єднанням ІЧ (див. нижче) забезпечують більш точне визначення тієї частини подушки, яка потребує зміни тиску наповнення. Хоча камерна конструкція подушки 250 (Фіг.13) трохи відрізняється від камерної конструкції, ілюстрованої Фіг.10-12, принцип стратегічного розташування поверхонь, здатних відбивати ІЧ світло, на внутрішніх стінках коробоподібних каналів може бути легко реалізований. Фіг.14 містить детальний вигляд у плані типового ІЧ передавача/датчика системи винаходу. Об'єктом конструювання такого ІЧ пристрою є єдина структура, якій можна надати конфігурацію як ІЧ передавача, так і ІЧ датчика. Наприклад, на Фіг.14 ІЧ передавач 134 розташовано над вікном 135 у контрольному проміжному шарі матеріалу оболонки 210. Передавач 134 розташовано у кишені 260, виготовленої з пластичного полімерного листового матеріалу (наприклад, поліуретану), придатного для приєднання зшиванням або зварюванням до матеріалу проміжного шару оболонки. Кишеня 260 має розмір, який дозволяє утримувати ІЧ передавач 134 у бажаному положенні. Матеріал кришки 262, розташованої на відкритій частині кишені 260 має мати здатність утримувати пристрій у кишені. Кришка 262 не обов'язково має бути водонепроникною на відміну від конструкції самого ІЧ передавача, який у бажаному втіленні має водонепроникний корпус. Для цього може бути придатний матеріал типу "липучка". ІЧ передавач/датчик 134 може мати жорсткий пластмасовий корпус, виготовлений литтям під тиском, в якому щонайменше одна сторона є прозорою для ІЧ світла, що спрямовується у відповідну камеру подушки. У цьому жорсткому пластмасовому корпусі розташовано плату ПК 272, на якій встановлено ІЧ світлодіод 274 і/або ІЧ датчик 276. Джерела ІЧ світла (звичайно твердотільні світло 15 діоди) і ІЧ датчики, придатні для використання у системі згідно з винаходом, є комерційно доступними. Схеми, пов'язані з ІЧ датчиками і використані бажаному втіленні, за конфігурацією здатні обслуговувати датчики у лінійній частині їх виходів (звичайно у насиченій частині) і мають авторегулювання підсилення для утримання датчика у лінійній частині. Це забезпечує більш точну пряму кореляцію між рівнями освітлення і виходом датчика. Таке рішення є особливо важливим у випадках незначних зміщень камер подушки матрацу у процесі моніторингу (невеликі зміни рівня освітлення), які в існуючих системах залишаються непоміченими. У бажаному втіленні винаходу використано оптичні фільтри для звуження ІЧ смуги частот при прийомі і моніторингу. Це звуження забезпечує оптимальне регулювання підсилення для утримання датчиків у лінійній частині їх вихідного сигналу. Хоча схема системи керування ІЧ передавачами, описана вище, забезпечує узгоджене функціонування цих пристроїв, в іншому варіанті керування передавачами об'єднує відповідні датчики у банки для відвернення взаємних перешкод між камерами. Уникання одночасного об'єднання пар датчик/передавач, спрямованих у суміжні камер зменшує або усуває такі взаємні перешкоди (коли світло від одного передавача приймається датчиком іншої пари передавач/датчик). Фіг.15 ілюструє процедуру використання вимірювання ІЧ освітлення у наповненій камері для визначення ситуації, коли зменшення висоти камери потребує підвищення тиску наповнення цієї камер для її підйому. Фіг.15 також ілюструє шароподібне розташування компонентів балонів системи винаходу. Система відновлення стану матрацу призначена для застосування з лікарняними ліжками існуючих конструкцій і її принципи функціонування можуть бути легко пристосовані до існуючих конструкцій при їх виготовленні. Для таких умов система включає балон 72 MRS, частково охоплений оболонкою 210 системи. Повертальні балони 54 і 56 розміщуються в оболонці 210 і у бажаному втіленні розташовані і утримуються у допоміжних оболонках, інтегрованих в оболонку 210. За необхідності в оболонці 210 можуть бути створені різні секції і внутрішні оболонки для розміщення і утримання різних балонів, компонентів контролю, кабелів і каналів для потоків повітря. Ці секції можуть бути з'єднані зшиванням або зварюванням, або можуть бути побудовані як частини матеріалу, які можуть з'єднуватись одна з одною зиперами (замками типу "молнія") або "липучими" поверхнями. Для утримання різних компонентів системи можуть бути використані також вшиті в оболонку стрічки матерії, які скріплюються пряжками або вузлами. Фіг.15 також ілюструє поперечний перетин контрольного проміжного шару системи через центр усієї матрацної системи. У такому розташуванні подушка 30 для тіла показана з ІЧ передавачем 134, встановленим на одному боці подушки і ІЧ датчиком 118 на протилежному боці. Показано контролер 106 матрацу (який містить схеми керу 92161 16 вання ІЧ передавачами), а також контролер крокового клапану 108 (який забезпечує наповнення подушки 30 для тіла). Показано також у перетині серцевинний проміжний шар з пінного матеріалу 212. Зовнішні компоненти системи, а саме, коробка надувального пристрою 10 з дисплеєм 101 і канал 280 первинного потоку повітря показано штриховими лініями у їх положеннях на ліжку разом з системою відновлення стану матрацу. Функцією ІЧ датчиків системи є вимірювання рівня освітлення у камері (на відміну від виявлення перешкоди на лінії проходження променю ІЧ світла). Отже, ІЧ передавач і ІЧ датчик не спрямовані один до одного, а спрямовані обидва в усю камеру. Шляхи світла, показані на Фіг.15 усередині подушки 30 (в одному або декількох поперечних коробоподібних каналах подушки 30) репрезентують напрямок, дисперсію і внутрішнє відбиття ІЧ світла у камері камер і його прийом ІЧ датчиком. Можна бачити, що навіть незначна зміна плоскої верхньої поверхні подушки викликає зниження рівня освітлення, яке приймає датчик. Значні зміни у площині поверхні, які можуть бути спричинені тиском ліктя або іншим вузько сконцентрованим тиском на зовнішню поверхню подушки, викличуть більш значні зміни загального рівня освітлення, прийняте датчиком. Цим забезпечується більш точне визначення рівня деформації поверхні і небезпеки "просідання". Контролери, описані вище і їх пряме з'єднання з банком ІЧ датчиків, а також з повітряними клапанами наповнення забезпечують більш негайну і належну реакцію на потребу збільшення або зменшення тиску наповнення у будьякій індивідуальній частині матрацної системи. Фіг.16 ілюструє встановлення системи винаходу на стандартному лікарняному ліжку тощо. Тут ліжко 290 має ножну панель 284, на якій розміщується у належному положенні коробка надувального пристрою корпусу 10 згідно з винаходом. Система 282 відновлення стану матрацу показана розташованою на ліжку 290 так, як розміщують стандартний матрац. Защіпка 286 є жорсткою панеллю, приєднаною до коробки надувального пристрою 10 з можливістю регулювання, дозволяє фіксувати коробку надувального пристрою на ножній панелі 284. Коробка надувального пристрою корпусу 10 має ергономічну ручку 288, яка допомагає розмістити її на ліжку і видалити з нього. Канал первинного потоку повітря з'єднує коробку надувального пристрою 10 з колектором 22 (не показаним), пов'язаним з проміжним шаром матрацної системи 282. Як уже відзначалось, реквізитні електричні/електронні кабелі і з'єднання між коробкою надувального пристрою і контрольним проміжним шаром вбудовано у структуру каналу первинного потоку повітря для усунення необхідності у додаткових з'єднаннях. У бажаному втіленні, канал 280 для потоку повітря має швидкороз'єднувальне з'єднання 281, яке дозволяє швидко відокремити коробку надувального пристрою від решти системи. Силовий електричний кабель 292 забезпечує живлення змінним струмом всіх електричних і електронних компонентів системи винаходу. На Фіг.16 показано також пристрій 296 провідної передачі даних, який може бути конфігурова 17 ний для передачі на невелику відстань (малопотужних) радіочастотних сигналів різних контролюючих пристроїв, вбудованих у систему. Оскільки може виникнути потреба у програмуванні різних калібраційних, режимних, параметричних тощо установках у мікроконтролерах системи, таке тісне розташування є зручним для надання засобів зміни установок у різних контролерах. Плати ПК для корпусів контролерів (Фіг.8 і 9) можуть містити необхідні схеми безпровідного трансивера зв'язку для обміну даними з розташованим на невеликій відстані ручним пристроєм. Мережевий протокол, використаний у бажаному втіленні винаходу (протокол CAN) може бути також використаний для забезпечення безпровідного зв'язку з цим ручним пристроєм, який у цьому випадку розглядатиметься як вузол мережі. Цей ручний вузол може бути також використаний для перевстановлення пара 92161 18 метрів, запрограмованих в індивідуальних контролерах, і/або може приймати і завантажувати дані передісторії, пов'язаної з функціонуванням контролеру протягом певного часу при різних змінах тиску і температури під час їх моніторингу, а також з вимірюваннями змін стану подушки ІЧ датчиками. Хоча винахід був описаний для бажаних втілень, цей опис слід розглядати лише як пояснення без жодних обмежень винаходу. Фахівець зможе зробити необхідні модифікації винаходу для пристосування до конкретних конструкцій, призначених утримувати пацієнта, або до конструкцій лікарняних ліжок. Такі модифікації, а також такі, що випадково збігаються з існуючими конструкціями ліжок, відповідають концепціям і входять в об'єм винаходу. 19 92161 20 21 92161 22 23 92161 24 25 92161 26 27 92161 28 29 92161 30 31 92161 32 33 92161 34 35 92161 36 37 92161 38 39 92161 40 41 92161 42 43 92161 44 45 Комп’ютерна верстка А. Рябко 92161 Підписне 46 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for maintaining an air inflation mattress configuration
Автори англійськоюFillip Bruys L., US); Vrazalik Jon H., US); Parker Jeffri C., US); Smit Kennet R., US); Honsales Huan L., US); Bendele Kevin B., US); Oliva Maykl R., US); Slimpin Pol D., US); Lina Sizar Z., US); Bird Mark Stiven Jeyms, US); Robson Hodfri Charl'z Aleksandr
Назва патенту російськоюСистема поддержания формы надувного матраса
Автори російськоюФиллип Брюс Л., US); Врзалик Джон Г., US); Паркер Джеффри С., US); Смит Кеннет Р., US); Гонсалес Хуан Л., US); Бенделе Кевин В., US); Олива Майкл Р., US); Слимпин Пол Д., US); Лина Сизар З., US); Бирд Марк Стивен Джеймс, US); Робсон Годфри Чарльз Александер
МПК / Мітки
МПК: A47C 27/10
Мітки: форми, матраца, підтримання, надувного, система
Код посилання
<a href="https://ua.patents.su/23-92161-sistema-pidtrimannya-formi-naduvnogo-matraca.html" target="_blank" rel="follow" title="База патентів України">Система підтримання форми надувного матраца</a>
Система підтримання екологічної рівноваги водоймища-охолоджувача переважно теплових або атомної електростанції

Номер патенту: 8527
Опубліковано: 30.09.1996
Автори: Каднікова Маргарита Глєбовна, Ільєвський Альберт Вікторович, Васенко Олександр Георгієвич, Сотніков Василь Миколайович
МПК: C02F 3/32
Мітки: електростанції, підтримання, теплових, рівноваги, система, атомної, екологічної, водоймища-охолоджувача, переважно
Клапан наповнення для надувного балона
Номер патенту: 48442
Опубліковано: 10.03.2010
Автор: Борисенко Віталій Миколайович
МПК: F17B 1/00
Мітки: надувного, наповнення, балона, клапан
Формула / Реферат:
Клапан наповнення для надувного балона, що включає зовнішній корпус, сполучений за допомогою різьбового з'єднання з внутрішнім корпусом, ущільнювальний елемент, розташований між зовнішнім і внутрішнім корпусами, підпружинений клапанний механізм, який розташований у внутрішньому корпусі і складається з штока, пружини і герметизатора штока, а також кришку з елементом ущільнювача, який відрізняється тим, що герметизатор виконаний з додатковим...
Спосіб та вузол дозування резервуарного або експедиційного лікеру в потік купажу або ігристого вина, спосіб підтримання величини витрати резервуарного лікеру та спосіб підтримання вмісту цукру в потоці ігристог

Номер патенту: 84182
Опубліковано: 25.09.2008
Автори: Ковальов Микола Миколайович, Бекасова Алла Василівна, Лензіон Валентин Йосипович, Горбачов Петро Юрійович, Безкоровайний Микола Іванович, Мацко Олександр Петрович, Михайленко Василь Григорович
МПК: C12G 1/06
Мітки: вузол, ігристого, експедиційного, дозування, купажу, ігристог, спосіб, лікеру, підтримання, вмісту, вина, резервуарного, витрати, цукру, потік, потоці, величини
Формула / Реферат:
1. Спосіб дозування резервуарного або експедиційного лікеру в потік купажу або ігристого вина, який включає дозовану подачу резервуарного або експедиційного лікеру в потік купажу або ігристого вина, витрату якого встановлюють, з подальшою подачею суміші в приймальну ємність, який відрізняється тим, що тиск потоків купажу або ігристого вина і резервуарного або експедиційного лікеру, які подаються на змішування, підтримують постійним за...
Система і спосіб автоматичного керування польотом енергетичних літальних пристроїв крилоподібної форми та їх застосування
Номер патенту: 89001
Опубліковано: 10.12.2009
Автор: Массімо Іпполіто
МПК: F03D 5/00, F03D 7/00, F03D 3/00, F03D 7/06
Мітки: літальних, пристроїв, енергетичних, застосування, автоматичного, спосіб, крилоподібної, система, польотом, керування, форми
Формула / Реферат:
1. Система для автоматичного керування польотом щонайменше одного крилоподібного літального пристрою (2), в якій вищезгаданий крилоподібний літальний пристрій (2) управляється блоком механічного приводу (9), оснащеним двома лебідками, з якими вищезгаданий крилоподібний літальний пристрій (2) з'єднується за допомогою двох відповідних приводних тросів (21), яка відрізняється тим, що включає перші засоби детектування (3), розміщені на борту...
Спосіб одержання кристалічного дегідрату габапентину форми в, кристалічні дегідрати габапентину форми а та форми в
Номер патенту: 77021
Опубліковано: 16.10.2006
Автори: Калвітт Клод Джеффрі, Тобаєс Браян, Чен Лінна Р., Бабу Суреш Р.
МПК: C07C 227/00, C07C 229/28
Мітки: кристалічного, форми, спосіб, габапентину, кристалічні, дегідрати, дегідрату, одержання
Формула / Реферат:
1. Спосіб одержання кристалічного дегідрату габапентину форми В, що включає:(а) дегідратацію моногідрату габапентину з утворенням кристалічного дегідрату габапентину форми А, і(б) витримування дегідрату габапентину форми А при кімнатній температурі з утворенням кристалічного дегідрату габапентину форми В.2. Спосіб за п.1, де стадію дегідратації (а) проводять шляхом використання вакууму, десиканту або нагрівання.3....
Попередній патент: Пристрій для нанесення розділювальних смуг на шляхове полотно
Наступний патент: Упаковка
Випадковий патент: Спосіб віброобробки деталей