Підводний маніпулятор
Номер патенту: 706
Опубліковано: 15.02.2001
Автори: Корольов Сергій Михайлович, Корольова Галина Валентинівна, Пуриш Валентин Захарович

Формула / Реферат
Підводний .маніпулятор, що містить опорний каркас із шарнірних елементів, покритий оболонкою, який відрізняється тим, що шарнірні елементи обладані слідкуючими гідроприводами з мікропроцесорним управлінням, оболонка виконана у вигляді м'якого гідроскафандра, крім того маніпулятор обладнано навішаною портативною пневмо-гідростанцією, центральним комп'ютером програмного управління та системами гіростабілізації і супервізорного телеуправління по кабельному та акустичному каналах.
Текст
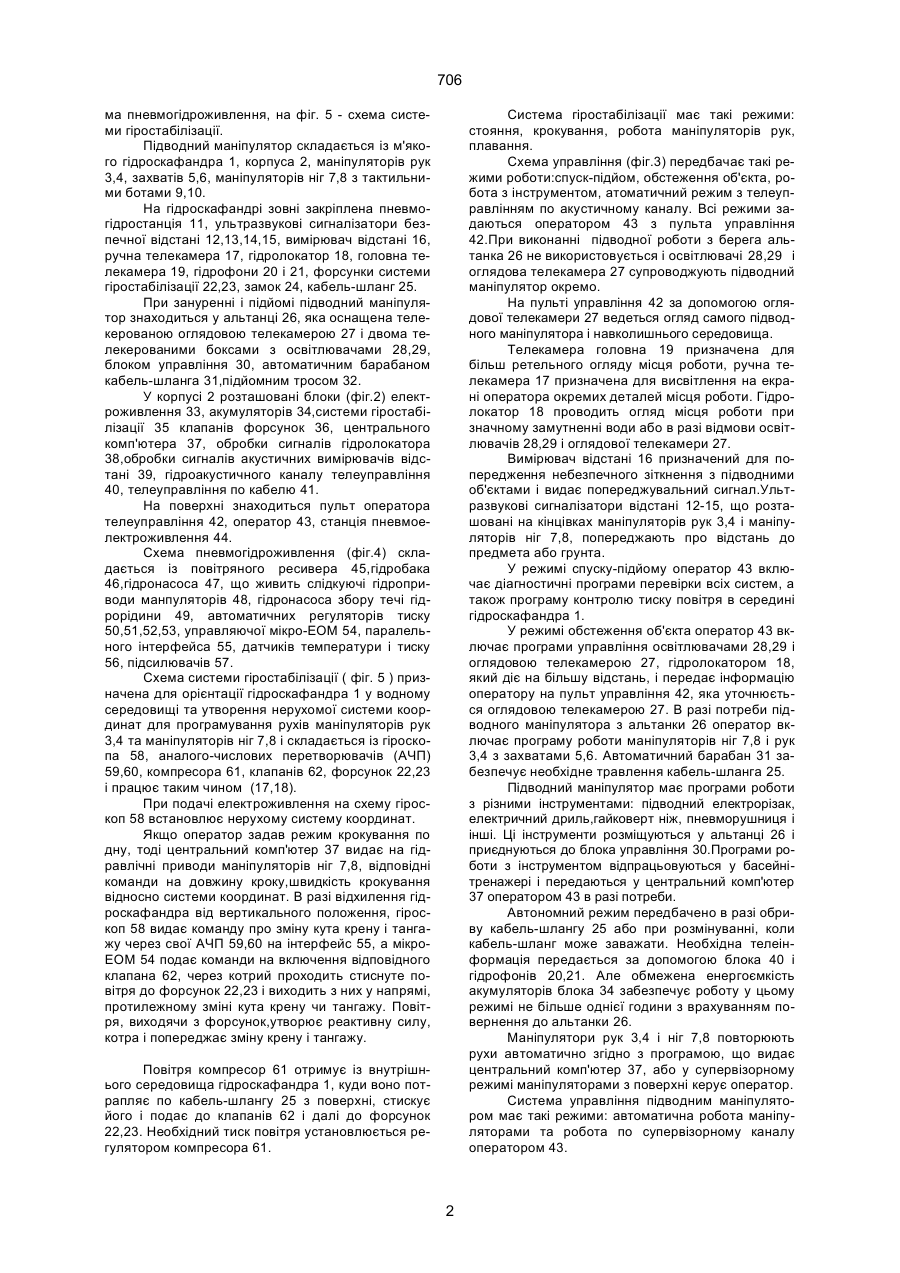
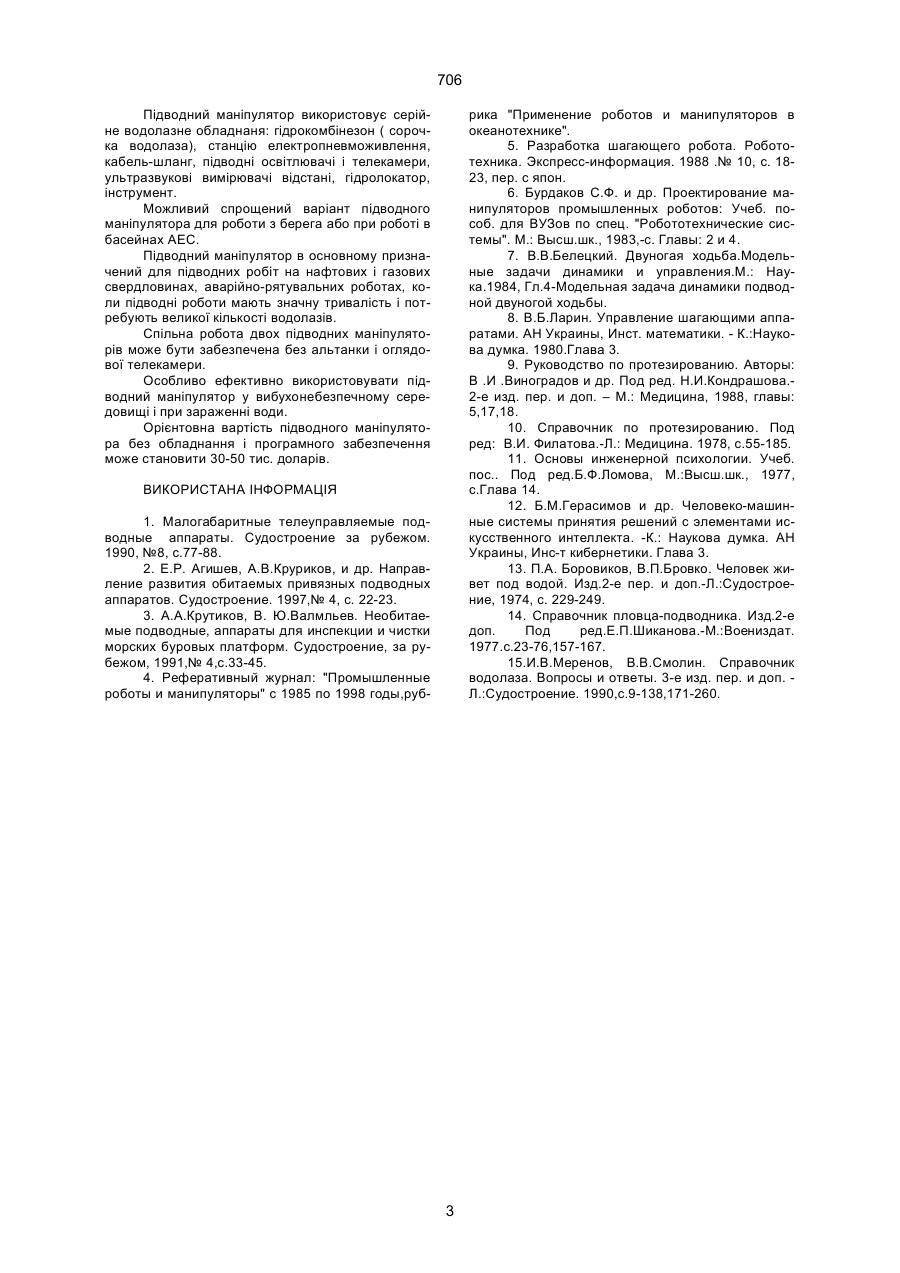
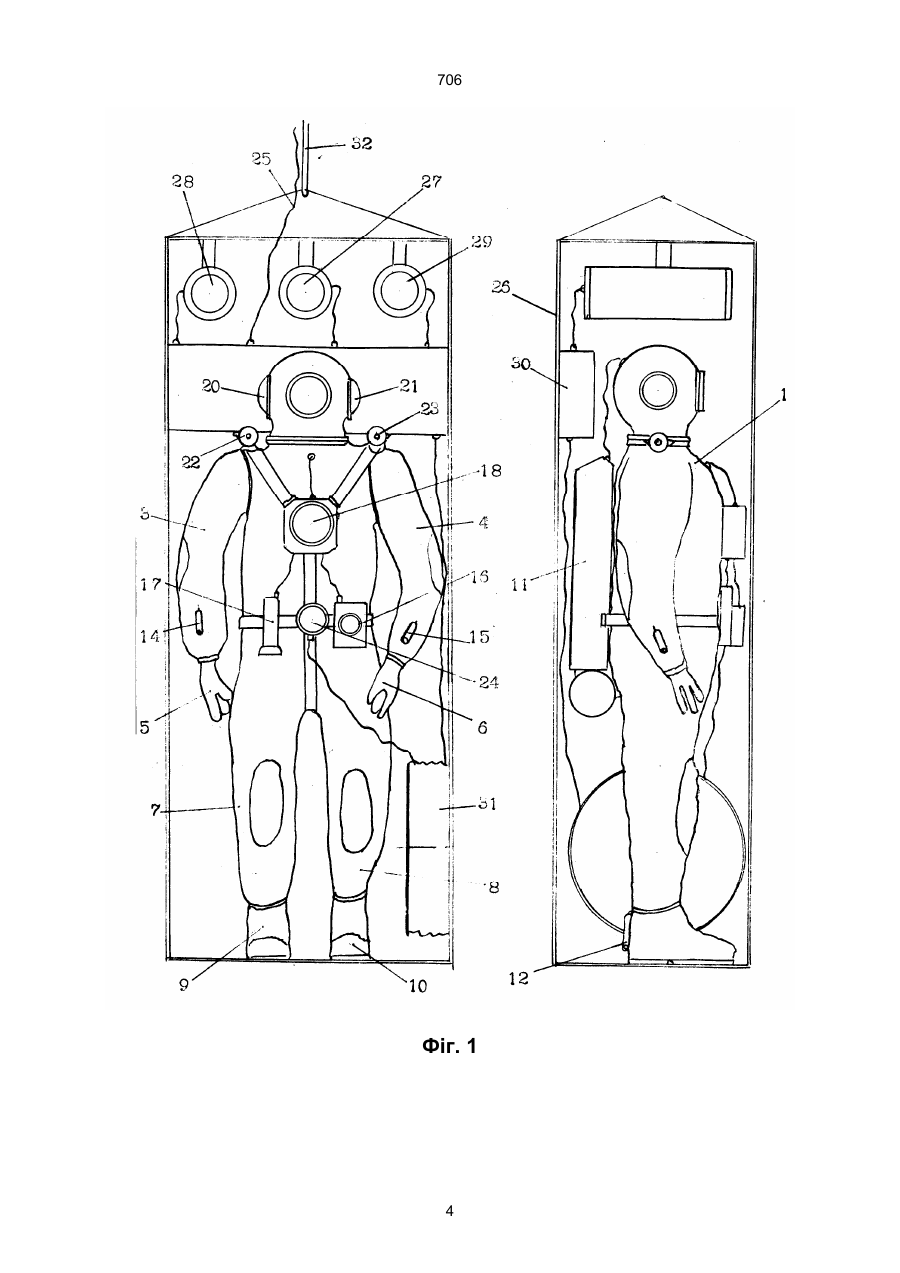
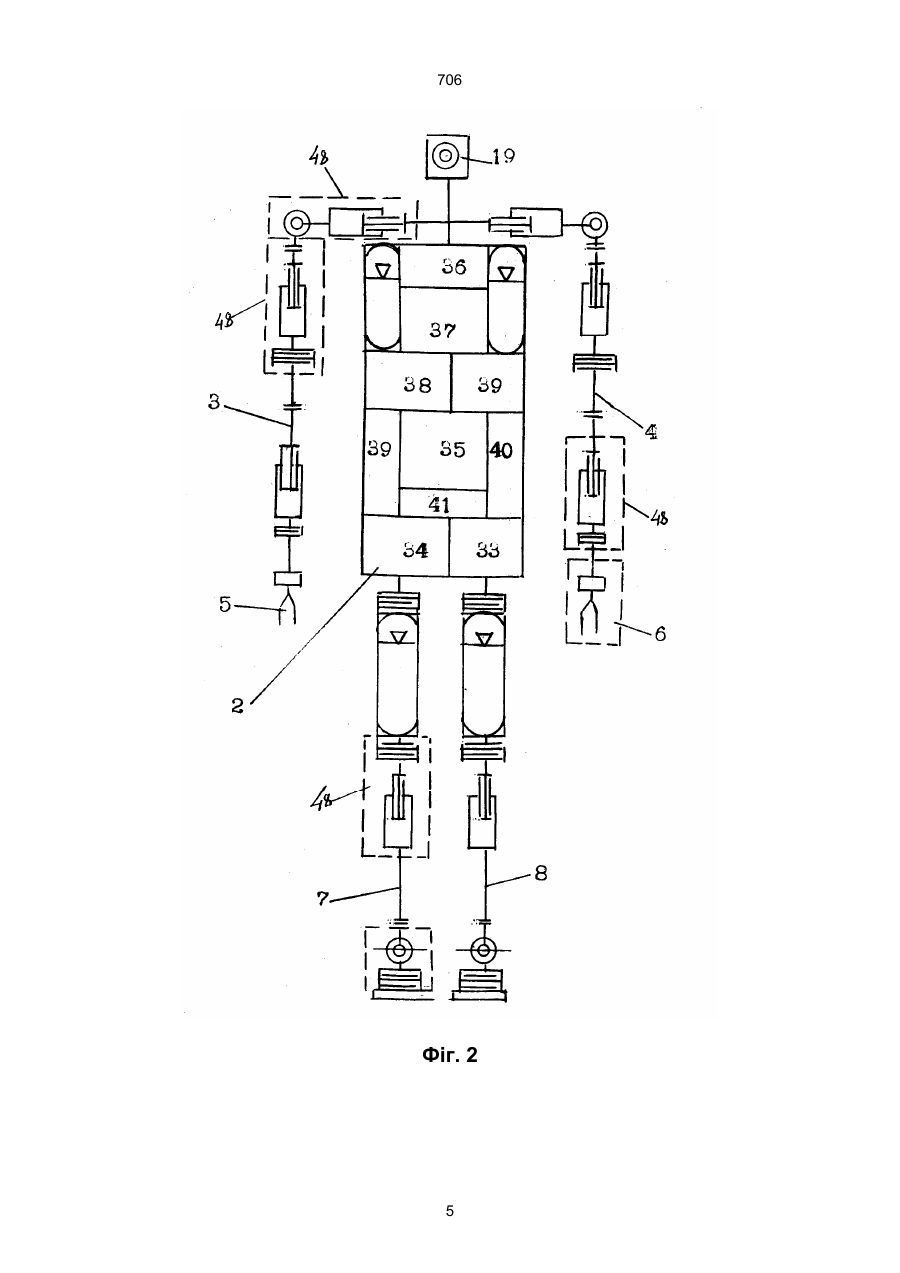
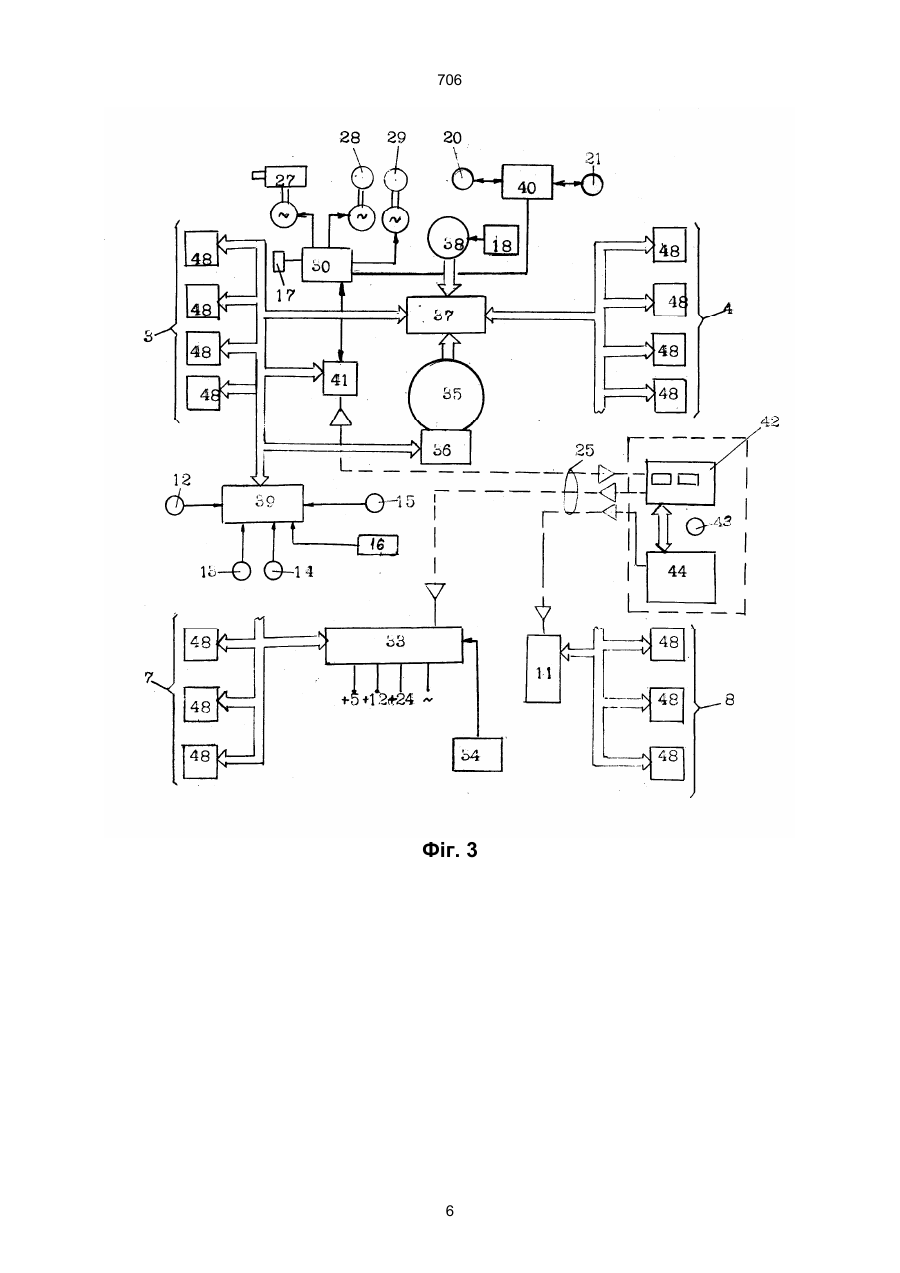
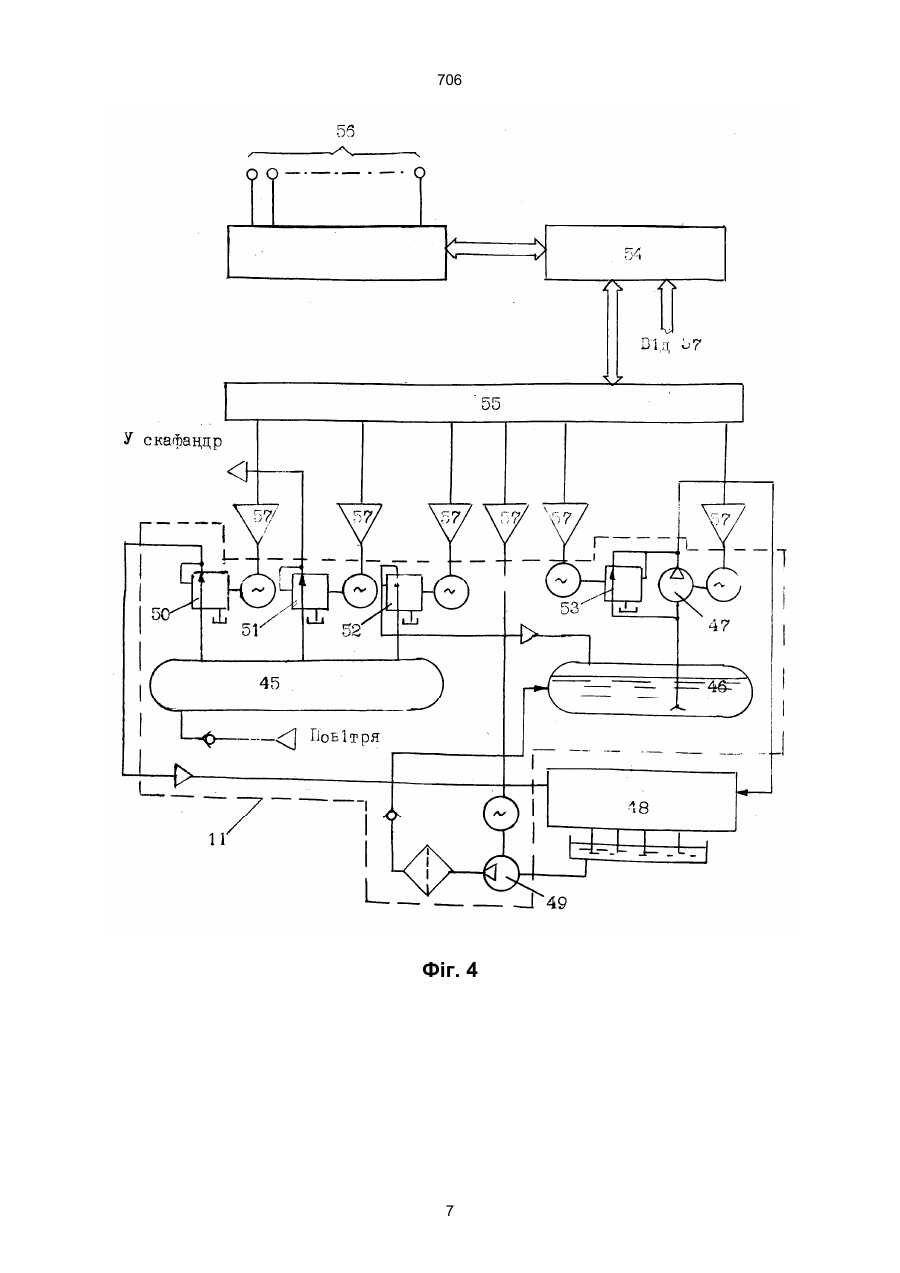
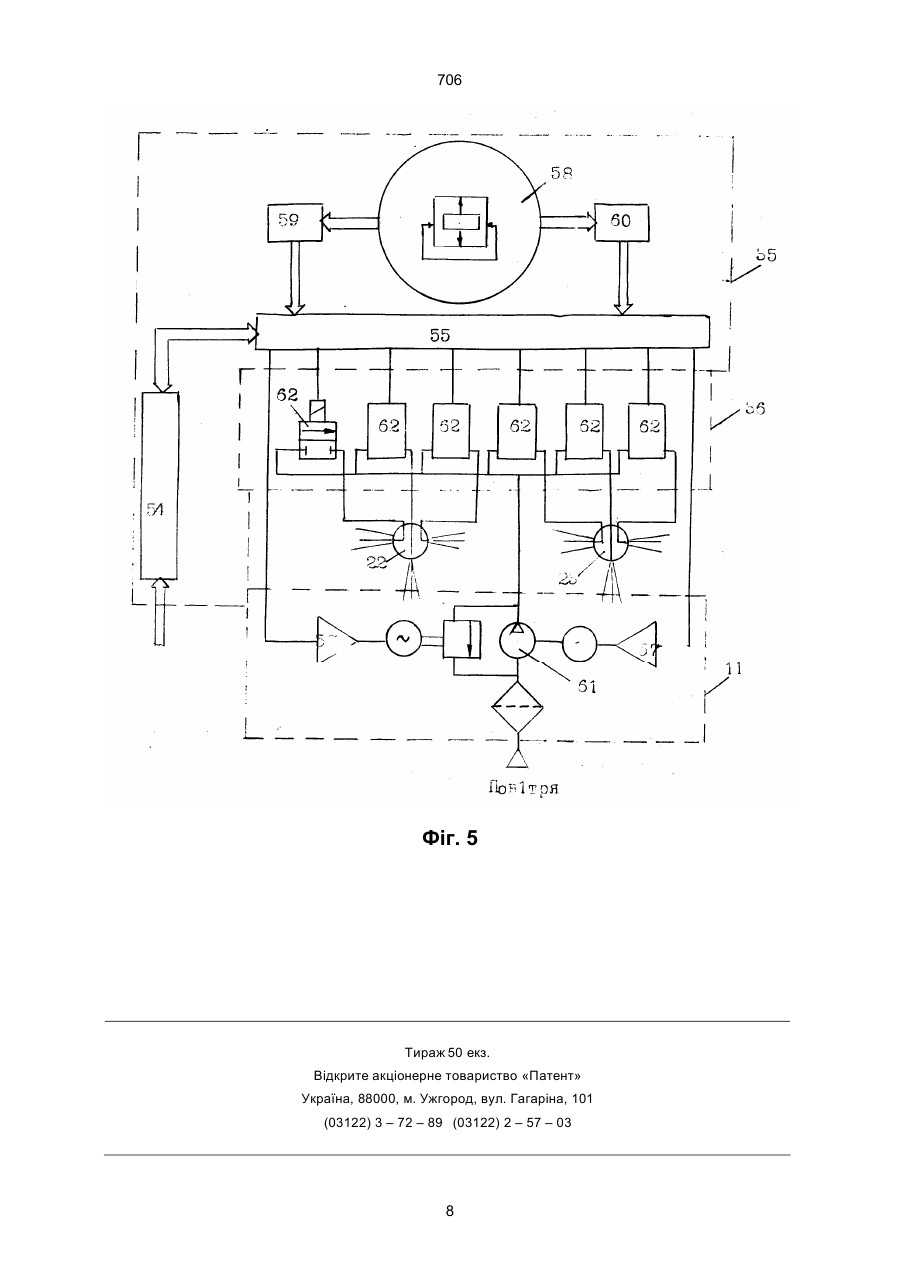
Підводний маніпулятор, що містить опорний каркас із шарнірних елементів, покритий оболон кою, який відрізняється тим, що шарнірні елементи обладані слідкуючими гідроприводами з мікропроцесорним управлінням, оболонка виконана у вигляді м'якого гідроскафандра, крім того маніпулятор обладнанo навішаною портативною пневмогідростанцією, центральним комп'ютером програмного управління та системами гіростабілізації і супервізорного телеуправління по кабельному та акустичному каналах. Ю На фіг.1. представлено загальний вигляд підводного маніпулятора, на фіг.2 - кінематична схема, на фіг. 3 - схема управління, на фіг.4 - схе (13) 706 (11) UA Побудова ланок маніпуляторів рук і ніг із слідкуючих гідроприводів з мікропроцесорним управлінням дозволяє дистанційно по команді оператора або автоматично по програмі центрального комп'ютера виконувати необхідні рухи, а за допомогою захватів утримувати різні інструменти і маніпулювати ними. За допомогою ланок маніпуляторів ніг, які теж побудовані з слідкуючих гідроприводів з мікропроцесорним управлінням. Підводний маніпулятор може крокувати по дну. Центральний комп'ютер програмного управління керує всіма слідкуючими гідроприводами і системами, а також веде обмін інформацією з оператором, котрий задає режими роботи. Система гіростабілізації виконує роль гіровертикалі, забезпечуючи точну фіксацію Підводного маніпулятора, компенсуючи вплив підводних течій і реакцій від рухів маніпуляторів рук і ніг. Система супервізорного телеуправління по кабельному каналу забезпечує зв'язок оператора з центральним комп'ютером та передає телевізійне зображення навколишнього середовища під водою. Акустичний канал телеуправління виконує роль аварійного або короткотермінового в разі відмови кабельного каналу. Пневмогідростанція забезпечує автономне живлення гідроприводів та подачу повітря на форсунки гіростабілізації і автоматичну підтримку тиску у середині гідроскафандра пропорційно глибині занурення. (19) Корисна модель належить до промислових роботів і маніпуляторів, а також до підводних безлюдних апаратів, оснащених програмованими маніпуляторами. Відомі безлюдні підводні апарати, оснащені маніпуляторами з дистанційним керуванням, але вони мають обмежені маніпуляційні можливості під водою і спеціалізоване призначення (2). Також відомі м’які і тверді водолазні гідроскафандри, призначені для виконання підводних робіт людиною у ньому, але вони небезпечні для перебування людини під водою тривалий час (3). Відома "Модель тіла людини" (А. с. СРСР № 952250) з каркасом із шарнірних елементів у оболонці,яка призначена для проведення гідро- і аеродинамічних випробувань (прототип). "Модель тіла людини" - прилад з пасивними шарнірними елементами, котрий не може виконувати маніпуляційні рухи по команді. Маніпулятори рук і ніг мають фіксатори у шарнірних елементах рук і ніг, за допомогою котрих оператор перед випробуванням механічно встановлює бажану конфігурацію їх. Задача корисної моделі полягає у тому, щоб "Модель тіла людини" перетворити у "Підводний маніпулятор", здатний виконувати програмовану роботу з телеуправлінням по супервізорному каналу. Поставлена задача вирішується таким чином, що згідно корисною моделлю опорний каркас побудовано із шарнірних слідкуючих гідроприводів з мікропроцесорним управлінням у м'якому гідроскафандрі,крім того його оснащено навішаною портативною пневмогідростанцією,центральним комп’ютером програмного управління та системами гіростабілізації і супервізорного телеуправління по кабельному та акустичному каналах. U ______________________________ 706 ма пневмогідроживлення, на фіг. 5 - схема системи гіростабілізації. Підводний маніпулятор складається із м'якого гідроскафандра 1, корпуса 2, маніпуляторів рук 3,4, захватів 5,6, маніпуляторів ніг 7,8 з тактильними ботами 9,10. На гідроскафандрі зовні закріплена пневмогідростанція 11, ультразвукові сигналізатори безпечної відстані 12,13,14,15, вимірювач відстані 16, ручна телекамера 17, гідролокатор 18, головна телекамера 19, гідрофони 20 і 21, форсунки системи гіростабілізації 22,23, замок 24, кабель-шланг 25. При зануренні і підйомі підводний маніпулятор знаходиться у альтанці 26, яка оснащена телекерованою оглядовою телекамерою 27 і двома телекерованими боксами з освітлювачами 28,29, блоком управління 30, автоматичним барабаном кабель-шланга 31,підйомним тросом 32. У корпусі 2 розташовані блоки (фіг.2) електроживлення 33, акумуляторів 34,системи гіростабілізації 35 клапанів форсунок 36, центрального комп'ютера 37, обробки сигналів гідролокатора 38,обробки сигналів акустичних вимірювачів відстані 39, гідроакустичного каналу телеуправління 40, телеуправління по кабелю 41. На поверхні знаходиться пульт оператора телеуправління 42, оператор 43, станція пневмоелектроживлення 44. Схема пневмогідроживлення (фіг.4) складається із повітряного ресивера 45,гідробака 46,гідронасоса 47, що живить слідкуючі гідроприводи манпуляторів 48, гідронасоса збору течі гідрорідини 49, автоматичних регуляторів тиску 50,51,52,53, управляючої мікро-ЕОМ 54, паралельного інтерфейса 55, датчиків температури і тиску 56, підсилювачів 57. Схема системи гіростабілізації ( фіг. 5 ) призначена для орієнтації гідроскафандра 1 у водному середовищі та утворення нерухомої системи координат для програмування рухів маніпуляторів рук 3,4 та маніпуляторів ніг 7,8 і складається із гіроскопа 58, аналого-числових перетворювачів (АЧП) 59,60, компресора 61, клапанів 62, форсунок 22,23 і працює таким чином (17,18). При подачі електроживлення на схему гіроскоп 58 встановлює нерухому систему координат. Якщо оператор задав режим крокування по дну, тоді центральний комп'ютер 37 видає на гідравлічні приводи маніпуляторів ніг 7,8, відповідні команди на довжину кроку,швидкість крокування відносно системи координат. В разі відхилення гідроскафандра від вертикального положення, гіроскоп 58 видає команду про зміну кута крену і тангажу через свої АЧП 59,60 на інтерфейс 55, а мікроЕОМ 54 подає команди на включення відповідного клапана 62, через котрий проходить стиснуте повітря до форсунок 22,23 і виходить з них у напрямі, протилежному зміні кута крену чи тангажу. Повітря, виходячи з форсунок,утворює реактивну силу, котра і попереджає зміну крену і тангажу. Система гіростабілізації має такі режими: стояння, крокування, робота маніпуляторів рук, плавання. Схема управління (фіг.3) передбачає такі режими роботи:спуск-підйом, обстеження об'єкта, робота з інструментом, атоматичний режим з телеуправлінням по акустичному каналу. Всі режими задаються оператором 43 з пульта управління 42.При виконанні підводної роботи з берега альтанка 26 не використовується і освітлювачі 28,29 і оглядова телекамера 27 супроводжують підводний маніпулятор окремо. На пульті управління 42 за допомогою оглядової телекамери 27 ведеться огляд самого підводного маніпулятора і навколишнього середовища. Телекамера головна 19 призначена для більш ретельного огляду місця роботи, ручна телекамера 17 призначена для висвітлення на екрані оператора окремих деталей місця роботи. Гідролокатор 18 проводить огляд місця роботи при значному замутненні води або в разі відмови освітлювачів 28,29 і оглядової телекамери 27. Вимірювач відстані 16 призначений для попередження небезпечного зіткнення з підводними об'єктами і видає попереджувальний сигнал.Ультразвукові сигналізатори відстані 12-15, що розташовані на кінцівках маніпуляторів рук 3,4 і маніпуляторів ніг 7,8, попереджають про відстань до предмета або грунта. У режимі спуску-підйому оператор 43 включає діагностичні програми перевірки всіх систем, а також програму контролю тиску повітря в середині гідроскафандра 1. У режимі обстеження об'єкта оператор 43 включає програми управління освітлювачами 28,29 і оглядовою телекамерою 27, гідролокатором 18, який діє на більшу відстань, і передає інформацію оператору на пульт управління 42, яка уточнюється оглядовою телекамерою 27. В разі потреби підводного маніпулятора з альтанки 26 оператор включає програму роботи маніпуляторів ніг 7,8 і рук 3,4 з захватами 5,6. Автоматичний барабан 31 забезпечує необхідне травлення кабель-шланга 25. Підводний маніпулятор має програми роботи з різними інструментами: підводний електрорізак, електричний дриль,гайковерт ніж, пневморушниця і інші. Ці інструменти розміщуються у альтанці 26 і приєднуються до блока управління 30.Програми роботи з інструментом відпрацьовуються у басейнітренажері і передаються у центральний комп'ютер 37 оператором 43 в разі потреби. Автономний режим передбачено в разі обриву кабель-шлангу 25 або при розмінуванні, коли кабель-шланг може заважати. Необхідна телеінформація передається за допомогою блока 40 і гідрофонів 20,21. Але обмежена енергоємкість акумуляторів блока 34 забезпечує роботу у цьому режимі не більше однієї години з врахуванням повернення до альтанки 26. Маніпулятори рук 3,4 і ніг 7,8 повторюють рухи автоматично згідно з програмою, що видає центральний комп'ютер 37, або у супервізорному режимі маніпуляторами з поверхні керує оператор. Система управління підводним маніпулятором має такі режими: автоматична робота маніпуляторами та робота по супервізорному каналу оператором 43. Повітря компресор 61 отримує із внутрішнього середовища гідроскафандра 1, куди воно потрапляє по кабель-шлангу 25 з поверхні, стискує його і подає до клапанів 62 і далі до форсунок 22,23. Необхідний тиск повітря установлюється регулятором компресора 61. 2 706 рика "Применение роботов и манипуляторов в океанотехнике". 5. Разработка шагающего робота. Робототехника. Экспресс-информация. 1988 .№ 10, с. 1823, пер. с япон. 6. Бурдаков С.Ф. и др. Проектирование манипуляторов промышленных роботов: Учеб. пособ. для ВУЗов по спец. "Робототехнические системы". М.: Высш.шк., 1983,-с. Главы: 2 и 4. 7. В.В.Белецкий. Двуногая ходьба.Модельные задачи динамики и управления.М.: Наука.1984, Гл.4-Модельная задача динамики подводной двуногой ходьбы. 8. В.Б.Ларин. Управление шагающими аппаратами. АН Украины, Инст. математики. - К.:Наукова думка. 1980.Глава 3. 9. Руководство по протезированию. Авторы: В .И .Виноградов и др. Под ред. Н.И.Кондрашова.2-е изд. пер. и доп. – М.: Медицина, 1988, главы: 5,17,18. 10. Справочник по протезированию. Под ред: В.И. Филатова.-Л.: Медицина. 1978, с.55-185. 11. Основы инженерной психологии. Учеб. пос.. Под ред.Б.Ф.Ломова, М.:Высш.шк., 1977, с.Глава 14. 12. Б.М.Герасимов и др. Человеко-машинные системы принятия решений с элементами искусственного интеллекта. -К.: Наукова думка. АН Украины, Инс-т кибернетики. Глава 3. 13. П.А. Боровиков, В.П.Бровко. Человек живет под водой. Изд.2-е пер. и доп.-Л.:Судостроение, 1974, с. 229-249. 14. Справочник пловца-подводника. Изд.2-е доп. Под ред.Е.П.Шиканова.-М.:Воениздат. 1977.с.23-76,157-167. 15.И.В.Меренов, В.В.Смолин. Справочник водолаза. Вопросы и ответы. 3-е изд. пер. и доп. Л.:Судостроение. 1990,с.9-138,171-260. Підводний маніпулятор використовує серійне водолазне обладнаня: гідрокомбінезон ( сорочка водолаза), станцію електропневможивлення, кабель-шланг, підводні освітлювачі і телекамери, ультразвукові вимірювачі відстані, гідролокатор, інструмент. Можливий спрощений варіант підводного маніпулятора для роботи з берега або при роботі в басейнах АЕС. Підводний маніпулятор в основному призначений для підводних робіт на нафтових і газових свердловинах, аварійно-рятувальних роботах, коли підводні роботи мають значну тривалість і потребують великої кількості водолазів. Спільна робота двох підводних маніпуляторів може бути забезпечена без альтанки і оглядової телекамери. Особливо ефективно використовувати підводний маніпулятор у вибухонебезпечному середовищі і при зараженні води. Орієнтовна вартість підводного маніпулятора без обладнання і програмного забезпечення може становити 30-50 тис. доларів. ВИКОРИСТАНА ІНФОРМАЦІЯ 1. Малогабаритные телеуправляемые подводные аппараты. Судостроение за рубежом. 1990, №8, с.77-88. 2. Е.Р. Агишев, А.В.Круриков, и др. Направление развития обитаемых привязных подводных аппаратов. Судостроение. 1997,№ 4, с. 22-23. 3. А.А.Крутиков, В. Ю.Валмльев. Необитаемые подводные, аппараты для инспекции и чистки морских буровых платформ. Судостроение, за рубежом, 1991,№ 4,с.33-45. 4. Реферативный журнал: "Промышленные роботы и манипуляторы" с 1985 по 1998 годы,руб 3 706 Фіг. 1 4 706 Фіг. 2 5 706 Фіг. 3 6 706 Фіг. 4 7 706 Фіг. 5 Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122) 3 – 72 – 89 (03122) 2 – 57 – 03 8
ДивитисяДодаткова інформація
Назва патенту англійськоюUnderwater manipulator
Автори англійськоюPurish Valentyn Zakharovych, Purysh Valentyn Zakharovych, Koroliov Serhii Mykhailovych, Koroliova Halyna Valentynivna
Назва патенту російськоюПодводный манипулятор
Автори російськоюПуриш Валентин Захарович, Королев Сергей Михайлович, Королева Галина Валентиновна
МПК / Мітки
МПК: B25J 3/00
Мітки: підводний, маніпулятор
Код посилання
<a href="https://ua.patents.su/8-706-pidvodnijj-manipulyator.html" target="_blank" rel="follow" title="База патентів України">Підводний маніпулятор</a>
Маніпулятор
Номер патенту: 188
Опубліковано: 30.04.1993
Автори: Шумейко Дмитро Іванович, Кравчун Степан Іванович, Мілушин Тимофій Тимофійович
МПК: B25J 9/00
Мітки: маніпулятор
Формула / Реферат:
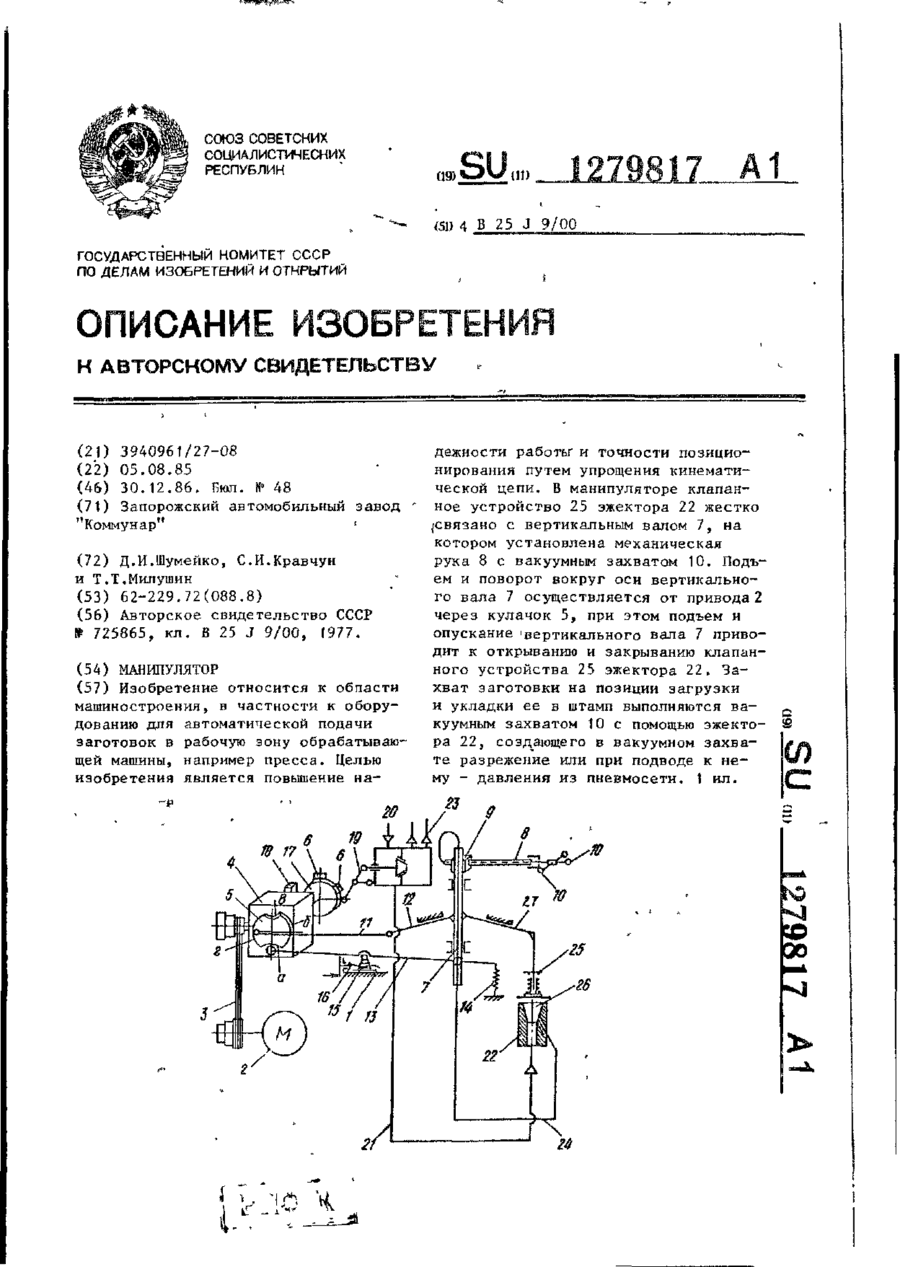
Формула изобретенияМанипулятор, содержащий механическую руку с пневматическими захватными органами, установленную на вертикальном валу, связанном посредством рычажной системы, с приводом ее подъема и поворота, кулачки, закрепленные на валу редуктора и взаимодействующие с пневмоклапаном, связанным трубопроводом с пневматическими механизмами, и эжектор с клапанным устройством, связанный трубопроводом с пневматическими захватными...
Маніпулятор
Номер патенту: 6962
Опубліковано: 31.03.1995
Автори: Валюх Володимир Федорович, Саленко Світлана Василівна, Свистун Віталій Леонідович
МПК: B25J 9/02, B25J 11/00
Мітки: маніпулятор
Формула / Реферат:
(57) 1. Манипулятор, содержащий основание, на котором смонтирован вал с механической рукой, в корпусе которой размещен приводной захват, имеющий индивидуальный корпус, а также механизмы подъема и поворота механической руки, отличающийся тем, что он снабжен механизмом автоматической ориентации захвата, выполненным в виде регулируемой тяги, кольца с рычагом и рычага, жестко связанного с корпусом захвата, причем оба рычага шарнирно соединены...
Підводний планер

Номер патенту: 28282
Опубліковано: 16.10.2000
Автори: Поліщук Сергій Володимирович, Коробов Віталій Ілліч, Бабенко Віктор Вітальович
МПК: B63B 3/13
Формула / Реферат:
Подводный планер, содержащий корпус аппарата и крылья, отличающийся тем, что последние имеют в своем теле бобины с гибким пленочным материалом, представляющим собой дополнительные поверхности крыльев, закрепленных на общем фигурным рычаге, проходящем через прорези, расположенные с боковых поверхностей корпуса планера перпендикулярно его продольной оси, и имеющем пальцы, входящие в отверстия направляющих и соединенные с бобышками, которые...
Підводний буксирований апаратурний носій

Номер патенту: 14168
Опубліковано: 25.04.1997
Автори: Блінков Віктор Олександрович, Сафонов Георгій Олександрович, Ком'ягін Юрій Васильович, Старков Костянтин Олександрович, Іваненко Михайло Іванович, Гайскій Віталій Олександрович
МПК: B63B 21/56
Мітки: носій, буксирований, апаратурний, підводний
Формула / Реферат:
1. Подводный буксируемый аппаратурный носитель, содержащий корпус с хвостовым оперением, выполненный в виде центрального и боковых цилиндров, жестко соединенных между собой при помощи основания обтекаемого профиля, на котором установлен кронштейн для крепления грузонесущего кабеля; выполненный в виде двух параллельных планок с отверстиями, при этом на внешней боковой поверхности каждого бокового цилиндра установлена пластина, на которой...
Маніпулятор інженера м.в.лєонєнко
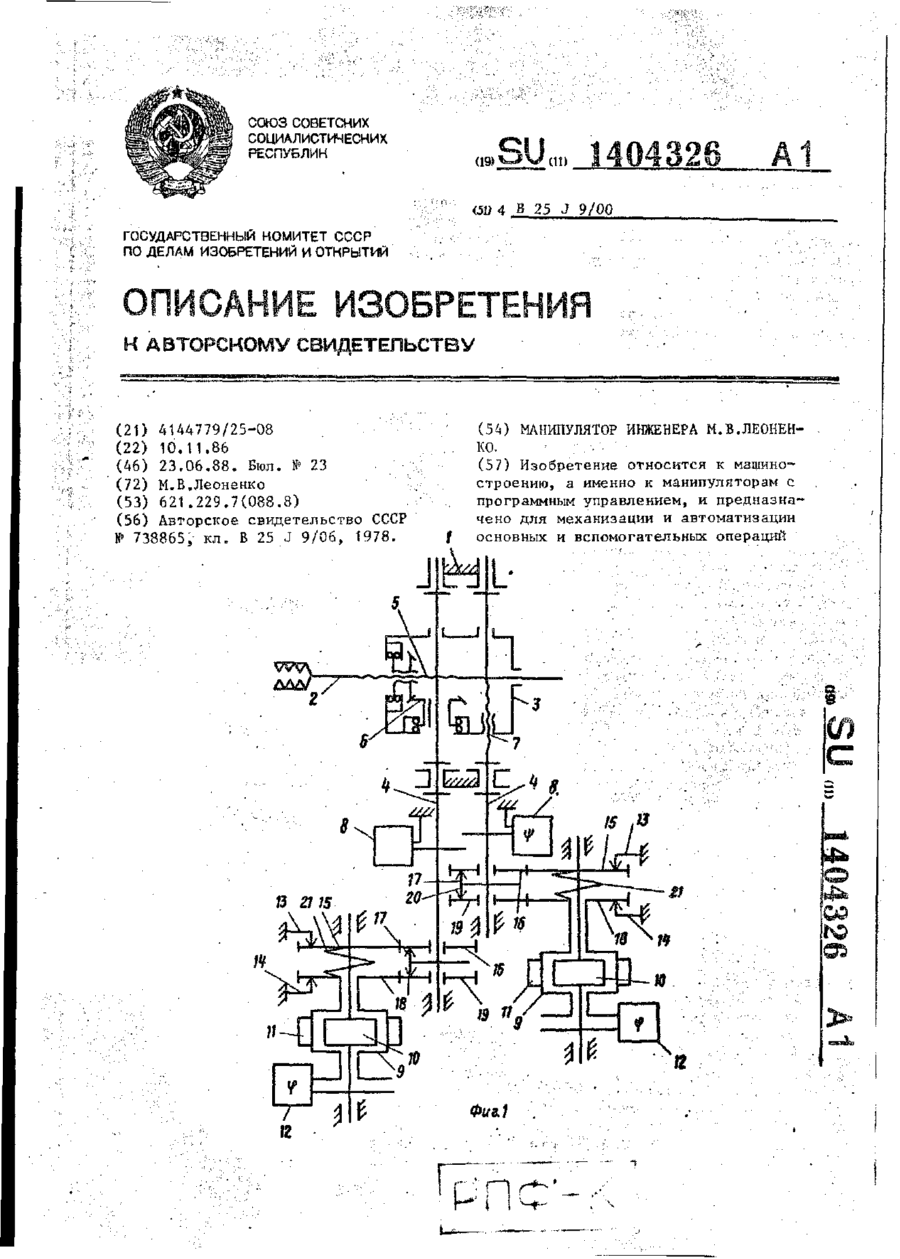
Номер патенту: 9003
Опубліковано: 30.09.1996
Автор: Лєонєнко Михайло Васильович
МПК: B25J 9/00
Мітки: м.в.лєонєнко, інженера, маніпулятор
Формула / Реферат:
1. Манипулятор, содержащий установленный на основании исполнительный орган с приводами его перемещения, каждый из которых включает двигатель, кинематическую цепь для связи двигателя с исполнительным органом, упругий элемент и систему управления, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения возможности позиционирования исполнительного органа в любой точке рабочей зоны манипулятора и повышения...
Попередній патент: Спосіб закладання вертикальних стволів шахт, що закриваються
Наступний патент: Сопло електрозварювального пальника
Випадковий патент: Спосіб відпалу монокристалів ортосилікату гадолінію