Ексцентриковий механізм підйому-опускання рухомої рами крокуючого конвеєра
Номер патенту: 24056
Опубліковано: 31.08.1998
Автори: Міславський Олександр Михайлович, Шмуклер Йосип Срулевіч, Чепенко Анатолій Іванович, Родякін Ігор Олександрович
Формула / Реферат
1. Эксцентриковый механизм подъема-опускания подвижной рамы шагающего конвейера, содержащий установленный с возможностью поворота в опорах на основании вал с эксцентриковой частью, расположенный на эксцентриковой части вала основной опорный каток для подвижной рамы шагающего конвейера и привод вала, отличающийся тем, что он снабжен расположенной на эксцентриковой части вала с возможностью поворота относительно последнего обоймой и двумя установленными на обойме посредством вертикальных осей направляющими катками для подвижной рамы, размещенными по обе стороны от торцов основного опорного катка.
2. Эксцентриковый механизм по п.1, отличающийся тем, что он имеет два дополнительных опорных катка для подвижной рамы установленных на обойме посредством осей и расположенных в ряд с основным опорным катком, но по разные стороны от последнего, параллельно ему.
Текст
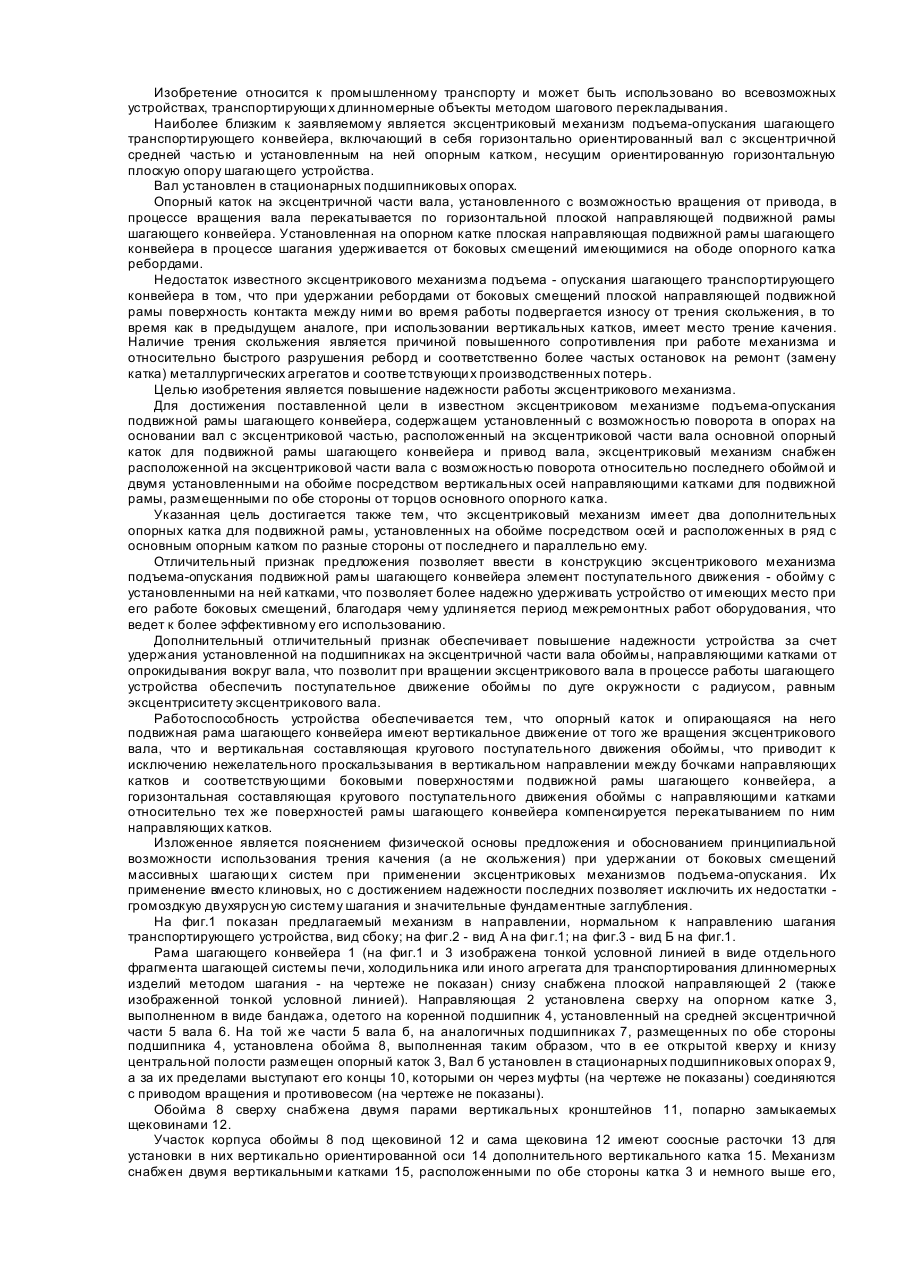
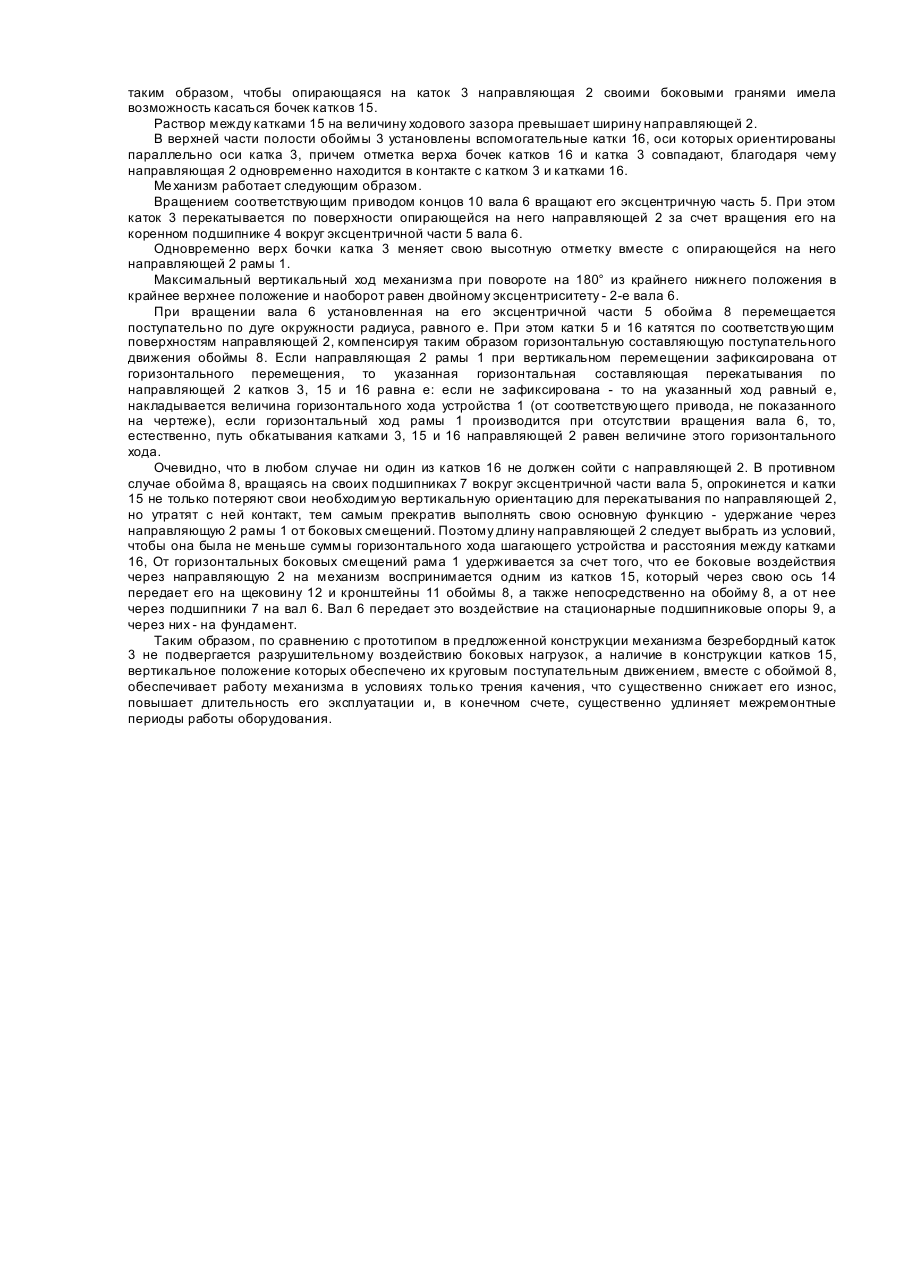
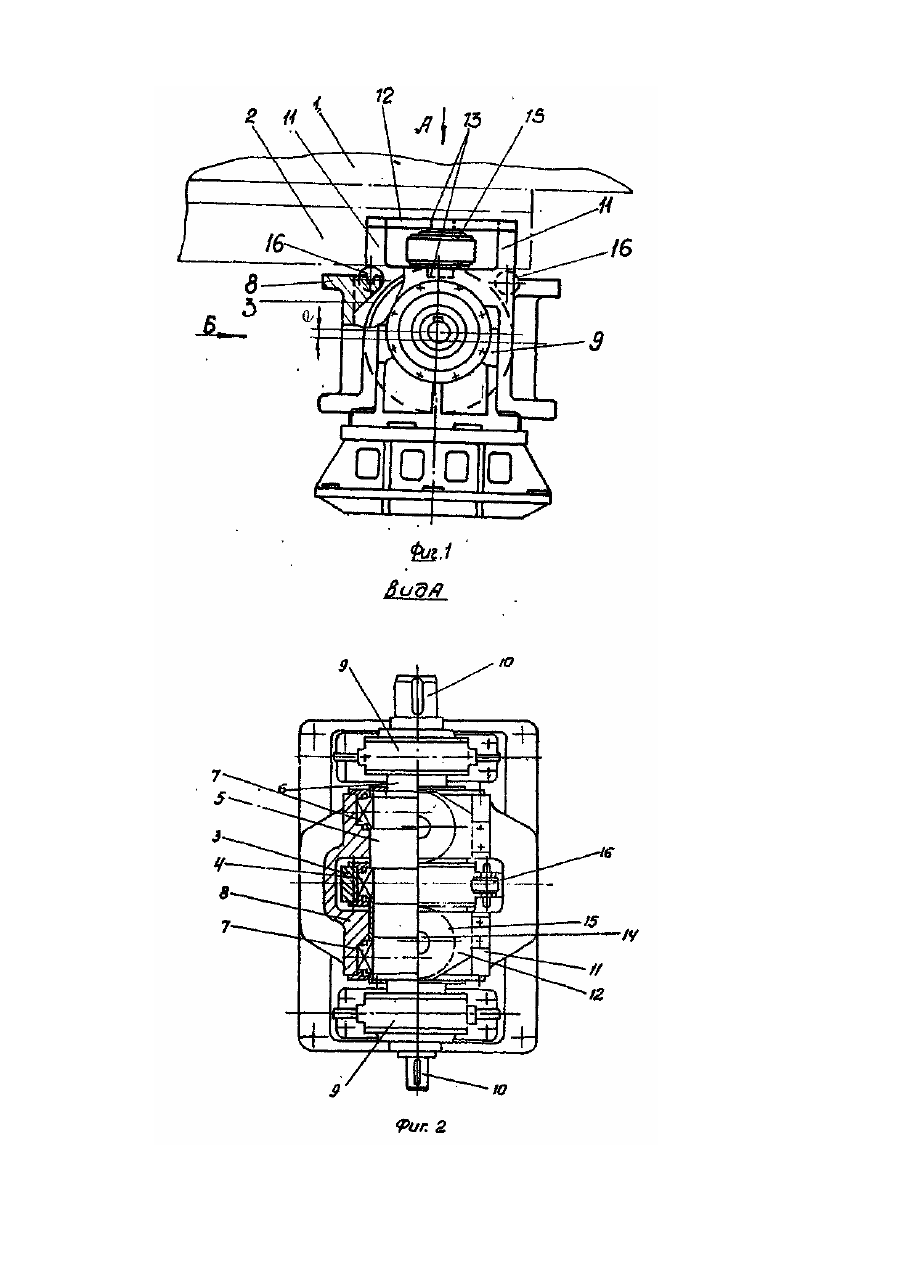
Изобретение относится к промышленному транспорту и может быть использовано во всевозможных устройствах, транспортирующи х длинномерные объекты методом шагового перекладывания. Наиболее близким к заявляемому является эксцентриковый механизм подъема-опускания шагающего транспортирующего конвейера, включающий в себя горизонтально ориентированный вал с эксцентричной средней частью и установленным на ней опорным катком, несущим ориентированную горизонтальную плоскую опору шагающего устройства. Вал установлен в стационарных подшипниковых опорах. Опорный каток на эксцентричной части вала, установленного с возможностью вращения от привода, в процессе вращения вала перекатывается по горизонтальной плоской направляющей подвижной рамы шагающего конвейера. Установленная на опорном катке плоская направляющая подвижной рамы шагающего конвейера в процессе шагания удерживается от боковых смещений имеющимися на ободе опорного катка ребордами. Недостаток известного эксцентрикового механизма подъема - опускания шагающего транспортирующего конвейера в том, что при удержании ребордами от боковых смещений плоской направляющей подвижной рамы поверхность контакта между ними во время работы подвергается износу от трения скольжения, в то время как в предыдущем аналоге, при использовании вертикальных катков, имеет место трение качения. Наличие трения скольжения является причиной повышенного сопротивления при работе механизма и относительно быстрого разрушения реборд и соответственно более частых остановок на ремонт (замену катка) металлургических агрегатов и соотве тствующи х производственных потерь. Целью изобретения является повышение надежности работы эксцентрикового механизма. Для достижения поставленной цели в известном эксцентриковом механизме подъема-опускания подвижной рамы шагающего конвейера, содержащем установленный с возможностью поворота в опорах на основании вал с эксцентриковой частью, расположенный на эксцентриковой части вала основной опорный каток для подвижной рамы шагающего конвейера и привод вала, эксцентриковый механизм снабжен расположенной на эксцентриковой части вала с возможностью поворота относительно последнего обоймой и двумя установленными на обойме посредством вертикальных осей направляющими катками для подвижной рамы, размещенными по обе стороны от торцов основного опорного катка. Указанная цель достигается также тем, что эксцентриковый механизм имеет два дополнительных опорных катка для подвижной рамы, установленных на обойме посредством осей и расположенных в ряд с основным опорным катком по разные стороны от последнего и параллельно ему. Отличительный признак предложения позволяет ввести в конструкцию эксцентрикового механизма подъема-опускания подвижной рамы шагающего конвейера элемент поступательного движения - обойму с установленными на ней катками, что позволяет более надежно удерживать устройство от имеющих место при его работе боковых смещений, благодаря чему удлиняется период межремонтных работ оборудования, что ведет к более эффективному его использованию. Дополнительный отличительный признак обеспечивает повышение надежности устройства за счет удержания установленной на подшипниках на эксцентричной части вала обоймы, направляющими катками от опрокидывания вокруг вала, что позволит при вращении эксцентрикового вала в процессе работы шагающего устройства обеспечить поступательное движение обоймы по дуге окружности с радиусом, равным эксцентриситету эксцентрикового вала. Работоспособность устройства обеспечивается тем, что опорный каток и опирающаяся на него подвижная рама шагающего конвейера имеют вертикальное движение от того же вращения эксцентрикового вала, что и вертикальная составляющая кругового поступательного движения обоймы, что приводит к исключению нежелательного проскальзывания в вертикальном направлении между бочками направляющих катков и соответствующими боковыми поверхностями подвижной рамы шагающего конвейера, а горизонтальная составляющая кругового поступательного движения обоймы с направляющими катками относительно тех же поверхностей рамы шагающего конвейера компенсируется перекатыванием по ним направляющих катков. Изложенное является пояснением физической основы предложения и обоснованием принципиальной возможности использования трения качения (а не скольжения) при удержании от боковых смещений массивных шагающи х систем при применении эксцентриковых механизмов подъема-опускания. Их применение вместо клиновых, но с достижением надежности последних позволяет исключить их недостатки громоздкую двухярусн ую систему шагания и значительные фундаментные заглубления. На фиг.1 показан предлагаемый механизм в направлении, нормальном к направлению шагания транспортирующего устройства, вид сбоку; на фиг.2 - вид А на фи г.1; на фиг.3 - вид Б на фиг.1. Рама шагающего конвейера 1 (на фиг.1 и 3 изображена тонкой условной линией в виде отдельного фрагмента шагающей системы печи, холодильника или иного агрегата для транспортирования длинномерных изделий методом шагания - на чертеже не показан) снизу снабжена плоской направляющей 2 (также изображенной тонкой условной линией). Направляющая 2 установлена сверху на опорном катке 3, выполненном в виде бандажа, одетого на коренной подшипник 4, установленный на средней эксцентричной части 5 вала 6. На той же части 5 вала б, на аналогичных подшипниках 7, размещенных по обе стороны подшипника 4, установлена обойма 8, выполненная таким образом, что в ее открытой кверху и книзу центральной полости размещен опорный каток 3, Вал б установлен в стационарных подшипниковых опорах 9, а за их пределами выступают его концы 10, которыми он через муфты (на чертеже не показаны) соединяются с приводом вращения и противовесом (на чертеже не показаны). Обойма 8 сверху снабжена двумя парами вертикальных кронштейнов 11, попарно замыкаемых щековинами 12. Участок корпуса обоймы 8 под щековиной 12 и сама щековина 12 имеют соосные расточки 13 для установки в них вертикально ориентированной оси 14 дополнительного вертикального катка 15. Механизм снабжен двумя вертикальными катками 15, расположенными по обе стороны катка 3 и немного выше его, таким образом, чтобы опирающаяся на каток 3 направляющая 2 своими боковыми гранями имела возможность касаться бочек катков 15. Раствор между катками 15 на величину ходового зазора превышает ширину направляющей 2. В верхней части полости обоймы 3 установлены вспомогательные катки 16, оси которых ориентированы параллельно оси катка 3, причем отметка верха бочек катков 16 и катка 3 совпадают, благодаря чему направляющая 2 одновременно находится в контакте с катком 3 и катками 16. Ме ханизм работает следующим образом. Вращением соответствующим приводом концов 10 вала 6 вращают его эксцентричную часть 5. При этом каток 3 перекатывается по поверхности опирающейся на него направляющей 2 за счет вращения его на коренном подшипнике 4 вокруг эксцентричной части 5 вала 6. Одновременно верх бочки катка 3 меняет свою высотную отметку вместе с опирающейся на него направляющей 2 рамы 1. Максимальный вертикальный ход механизма при повороте на 180° из крайнего нижнего положения в крайнее верхнее положение и наоборот равен двойному эксцентриситету - 2-е вала 6. При вращении вала 6 установленная на его эксцентричной части 5 обойма 8 перемещается поступательно по дуге окружности радиуса, равного е. При этом катки 5 и 16 катятся по соответствующим поверхностям направляющей 2, компенсируя таким образом горизонтальную составляющую поступательного движения обоймы 8. Если направляющая 2 рамы 1 при вертикальном перемещении зафиксирована от горизонтального перемещения, то указанная горизонтальная составляющая перекатывания по направляющей 2 катков 3, 15 и 16 равна е: если не зафиксирована - то на указанный ход равный е, накладывается величина горизонтального хода устройства 1 (от соответствующего привода, не показанного на чертеже), если горизонтальный ход рамы 1 производится при отсутствии вращения вала 6, то, естественно, путь обкатывания катками 3, 15 и 16 направляющей 2 равен величине этого горизонтального хода. Очевидно, что в любом случае ни один из катков 16 не должен сойти с направляющей 2. В противном случае обойма 8, вращаясь на своих подшипниках 7 вокруг эксцентричной части вала 5, опрокинется и катки 15 не только потеряют свои необходимую вертикальную ориентацию для перекатывания по направляющей 2, но утратят с ней контакт, тем самым прекратив выполнять свою основную функцию - удержание через направляющую 2 рамы 1 от боковых смещений. Поэтому длину направляющей 2 следует выбрать из условий, чтобы она была не меньше суммы горизонтального хода шагающего устройства и расстояния между катками 16, От горизонтальных боковых смещений рама 1 удерживается за счет того, что ее боковые воздействия через направляющую 2 на механизм воспринимается одним из катков 15, который через свою ось 14 передает его на щековину 12 и кронштейны 11 обоймы 8, а также непосредственно на обойму 8, а от нее через подшипники 7 на вал 6. Вал 6 передает это воздействие на стационарные подшипниковые опоры 9, а через них - на фундамент. Таким образом, по сравнению с прототипом в предложенной конструкции механизма безребордный каток 3 не подвергается разрушительному воздействию боковых нагрузок, а наличие в конструкции катков 15, вертикальное положение которых обеспечено их круговым поступательным движением, вместе с обоймой 8, обеспечивает работу механизма в условиях только трения качения, что существенно снижает его износ, повышает длительность его эксплуатации и, в конечном счете, существенно удлиняет межремонтные периоды работы оборудования.
ДивитисяДодаткова інформація
Назва патенту англійськоюEccentric mechanism of lifting-lowering mobile frame of walking conveyor
Автори англійськоюChepenko Anatolii Ivanovych, Shmukler Yosyp Srulevych, Rodiakyn Ihor Oleksandrovych, Mislavskyi Oleksandr Mykhailovych
Назва патенту російськоюЭксцентриковый механизм подъема-опускания подвижной рамы шагающего конвейера
Автори російськоюЧепенко Анатолий Иванович, Шмуклер Иосиф Срулевич, Родякин Игорь Александрович, Миславский Александр Михайлович
МПК / Мітки
МПК: B65G 25/00
Мітки: ексцентриковий, конвеєра, рухомої, підйому-опускання, крокуючого, механізм, рами
Код посилання
<a href="https://ua.patents.su/4-24056-ekscentrikovijj-mekhanizm-pidjjomu-opuskannya-rukhomo-rami-krokuyuchogo-konveehra.html" target="_blank" rel="follow" title="База патентів України">Ексцентриковий механізм підйому-опускання рухомої рами крокуючого конвеєра</a>
Механізм піднімання та опускання піляльної рамки стрічкопиляльного верстата
Номер патенту: 187
Опубліковано: 31.08.1998
Автор: Марічев Юрій Володимирович
МПК: B27B 15/00
Мітки: верстата, механізм, опускання, піляльної, стрічкопиляльного, піднімання, рамки
Формула / Реферат:
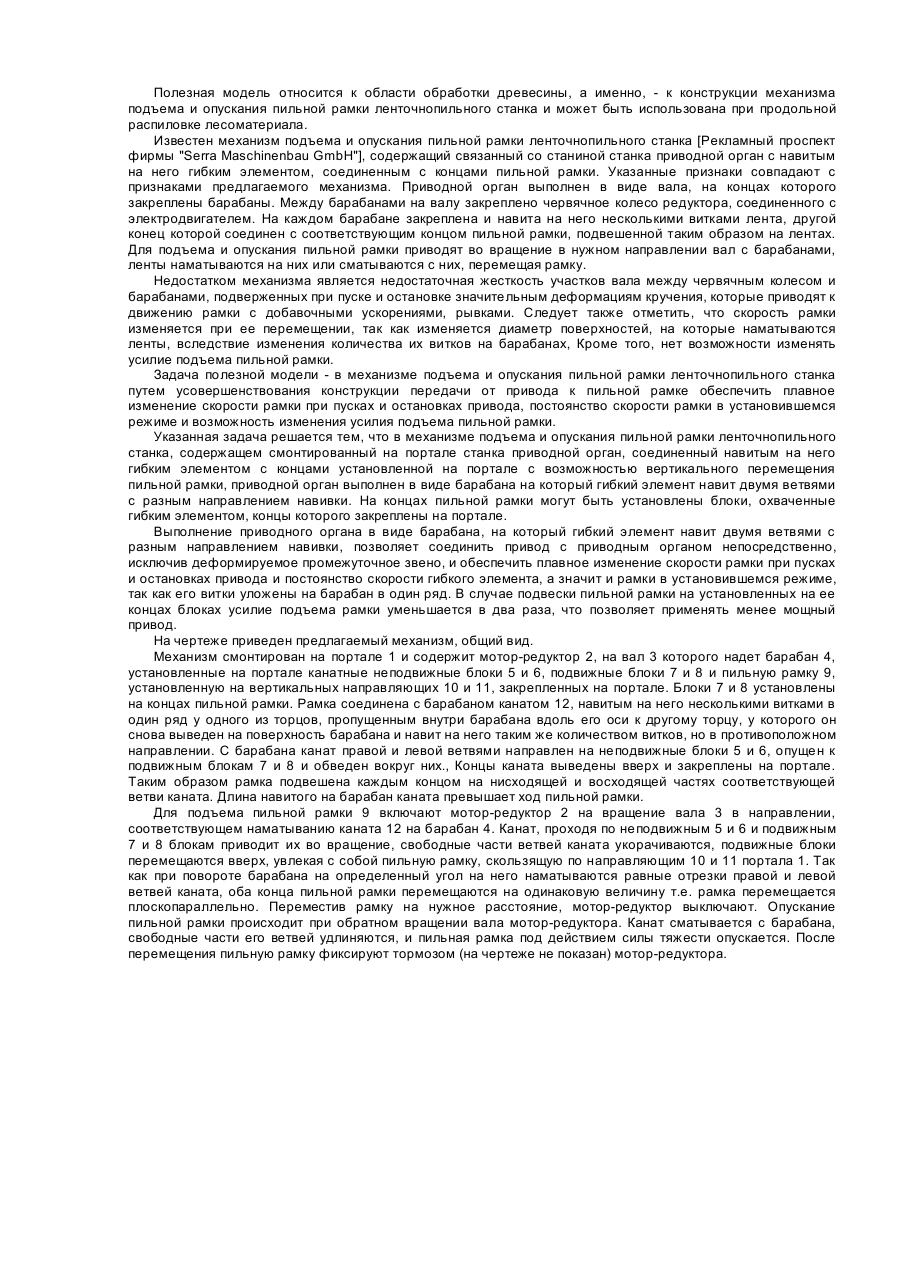
1. Механизм подъема и опускания пильной рамки ленточнопильного станка, содержащий смонтированный на портале станка приводной орган, соединенный навитым на него гибким элементом с концами установленной на портале с возможностью вертикального перемещения пильной рамки, отличающийся тем, что приводной орган выполнен в виде барабана, на который гибкий элемент навит двумя ветвями с разным направлением навивки.2. Механизм по п.1,...
Механізм подачі виїмкового комбайна
Номер патенту: 20575
Опубліковано: 15.07.1997
Автори: Дьяченко Костянтин Іванович, Андреєв Георгій Володимирович, Романов Костянтин Філоретович, Косарєв Іван Васильович, Гриценко Віталй Петрович
МПК: E21C 29/00
Мітки: подачі, виїмкового, механізм, комбайна
Формула / Реферат:
Механизм подачи добычного комбайна, работающего с рамы конвейера, включающий привод, звёздочку, трубчатую направляющую, состоящую из шарнирно соединённых между собой звеньев с элементами зацепления в виде пальцев с полусферическими концами, входящих в зацепление со звёздочкой, закреплённую на головках конвейера и свободно расположенную в жёлобе, жёстко связанном с рамой конвейера, отличающийся тем, что между каждой парой звеньев...
Переносний пристрій для підйому і опускання деталей на контактній мережі при ремонтних роботах

Номер патенту: 5389
Опубліковано: 28.12.1994
Автор: Чеботарьов Григорій Аврамович
МПК: B66D 1/26
Мітки: мережі, пристрій, підйому, переносний, контактний, роботах, ремонтних, опускання, деталей
Формула / Реферат:
Переносное приспособление для подъема и опускания деталей на контактной сети при ремонтных работах, содержащее корпус, крюк, канатный барабан и храповое колесо с собачкой, отличающееся тем, что оно снабжено фрикционными накладками на ребордах канатного барабана, упорным диском с управляющей рукояткой, закрепленным резьбовым соединением на указанном корпусе с возможностью перемещения и взаимодействия с подпружиненными нажимными...
Приводний механізм гідромашини
Номер патенту: 23672
Опубліковано: 02.06.1998
Автор: Садлаєв Олег Османович
МПК: F16H 21/18
Мітки: приводний, гідромашини, механізм
Формула / Реферат:
Приводной механизм гидромашины, содержащий кривошип, соединенный с пальцем ползуна, установленного в направляющей, отличающийся тем, что палец расположен в пазу, выполненном в ползуне перпендикулярно направляющей.
Двошарнірний катковий ланцюг
Номер патенту: 15123
Опубліковано: 30.06.1997
Автор: Рахманов Микола Миколайович
МПК: F16G 13/00, B65G 17/30
Мітки: ланцюг, катковий, двошарнірний
Формула / Реферат:
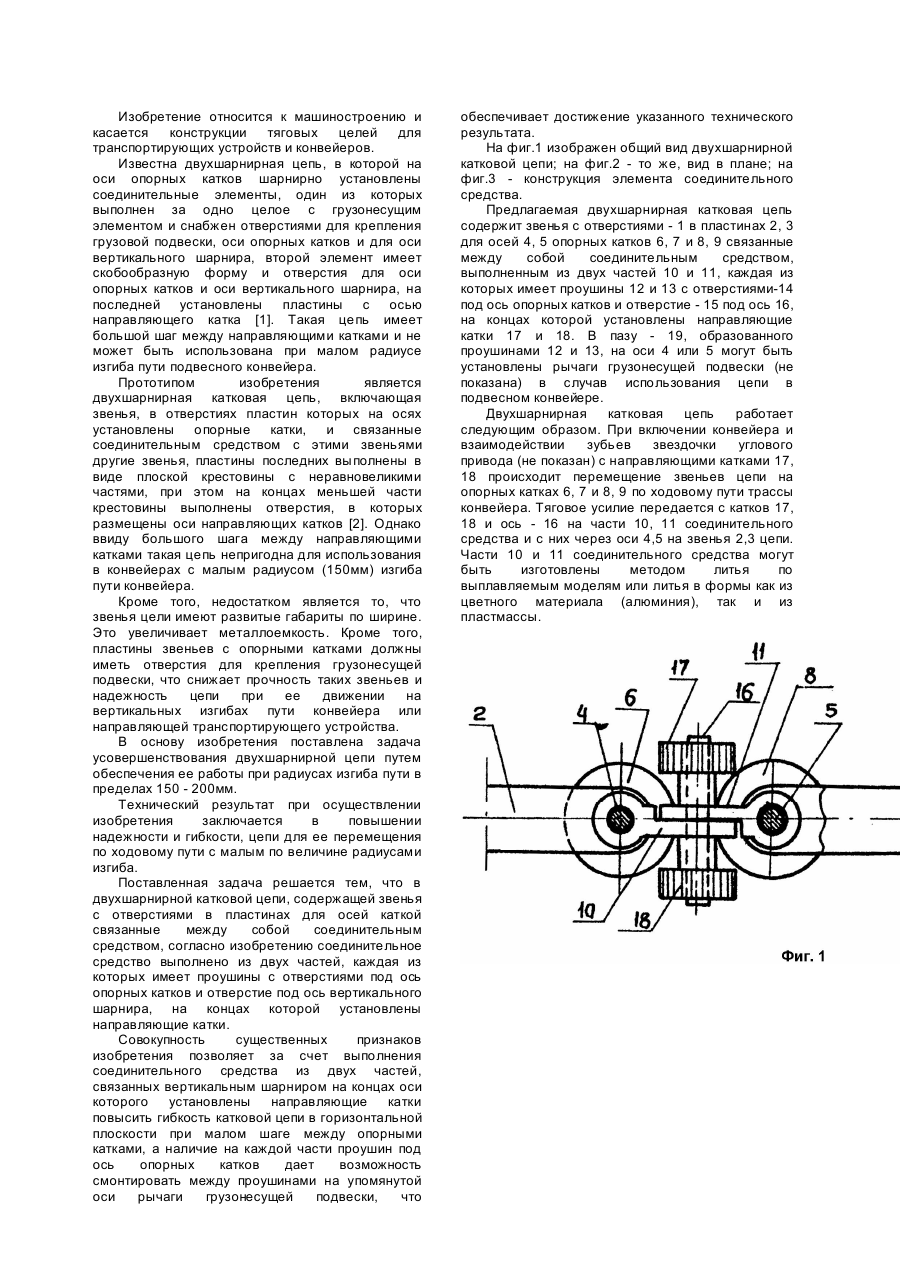
Двухшарнирная катковая цепь, содержащая звенья с отверстиями в пластинах для осей катков связанные между собой соединительным средством, отличающаяся тем, что соединительное средство выполнено из двух частей, каждая из которых имеет проушины с отверстиями под ось опорных катков и отверстие под ось вертикального шарнира, на концах которой установлены направляющие катки.
Попередній патент: Пристрій для вимірювання середнього діаметра круглих виробів
Наступний патент: Вертикальна перегородка
Випадковий патент: Спосіб отримання 1-алкіл-2-аміно-3-гетарил-4(5н)-кетопіролів