Захватний пристрій промислового робота
Номер патенту: 24280
Опубліковано: 25.06.2007
Автори: Мажара Віталій Анатолійович, Годунко Максим Олегович, Павленко Іван Іванович
Завантажити PDF файл.
Формула / Реферат
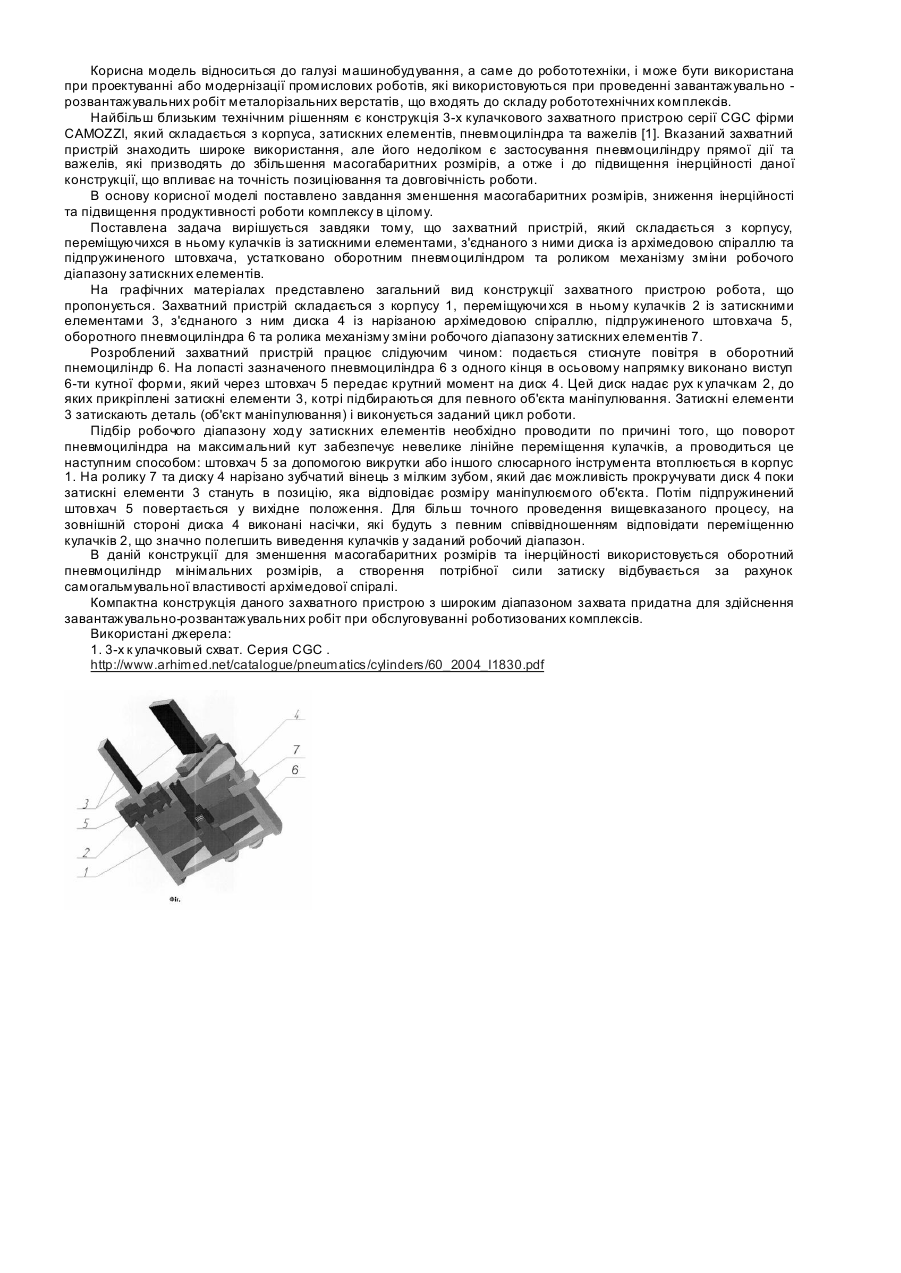
Захватний пристрій промислового робота, який складається з корпусу, кулачків із затискними елементами, що переміщуються в корпусі з'єднаного з ними диска із архімедовою спіраллю, та підпружиненого штовхача, який відрізняється тим, що його устатковано оборотним пневмоциліндром та роликом механізму зміни робочого діапазону затискних елементів.
Текст
Корисна модель відноситься до галузі машинобудування, а саме до робототехніки, і може бути використана при проектуванні або модернізації промислових роботів, які використовуються при проведенні завантажувально розвантажувальних робіт металорізальних верстатів, що входять до складу робототехнічних комплексів. Найбільш близьким технічним рішенням є конструкція 3-х кулачкового захватного пристрою серії CGC фірми CAMOZZI, який складається з корпуса, затискних елементів, пневмоциліндра та важелів [1]. Вказаний захватний пристрій знаходить широке використання, але його недоліком є застосування пневмоциліндру прямої дії та важелів, які призводять до збільшення масогабаритних розмірів, а отже і до підвищення інерційності даної конструкції, що впливає на точність позиціювання та довговічність роботи. В основу корисної моделі поставлено завдання зменшення масогабаритних розмірів, зниження інерційності та підвищення продуктивності роботи комплексу в цілому. Поставлена задача вирішується завдяки тому, що захватний пристрій, який складається з корпусу, переміщуючихся в ньому кулачків із затискними елементами, з'єднаного з ними диска із архімедовою спіраллю та підпружиненого штовхача, устатковано оборотним пневмоциліндром та роликом механізму зміни робочого діапазону затискних елементів. На графічних матеріалах представлено загальний вид конструкції захватного пристрою робота, що пропонується. Захватний пристрій складається з корпусу 1, переміщуючи хся в ньому кулачків 2 із затискними елементами 3, з'єднаного з ним диска 4 із нарізаною архімедовою спіраллю, підпружиненого штовхача 5, оборотного пневмоциліндра 6 та ролика механізму зміни робочого діапазону затискних елементів 7. Розроблений захватний пристрій працює слідуючим чином: подається стиснуте повітря в оборотний пнемоциліндр 6. На лопасті зазначеного пневмоциліндра 6 з одного кінця в осьовому напрямку виконано виступ 6-ти кутної форми, який через штовхач 5 передає крутний момент на диск 4. Цей диск надає рух к улачкам 2, до яких прикріплені затискні елементи 3, котрі підбираються для певного об'єкта маніпулювання. Затискні елементи 3 затискають деталь (об'єкт маніпулювання) і виконується заданий цикл роботи. Підбір робочого діапазону ходу затискних елементів необхідно проводити по причині того, що поворот пневмоциліндра на максимальний кут забезпечує невелике лінійне переміщення кулачків, а проводиться це наступним способом: штовхач 5 за допомогою викрутки або іншого слюсарного інструмента втоплюється в корпус 1. На ролику 7 та диску 4 нарізано зубчатий вінець з мілким зубом, який дає можливість прокручувати диск 4 поки затискні елементи 3 стануть в позицію, яка відповідає розміру маніпулюємого об'єкта. Потім підпружинений штовхач 5 повертається у вихідне положення. Для більш точного проведення вищевказаного процесу, на зовнішній стороні диска 4 виконані насічки, які будуть з певним співвідношенням відповідати переміщенню кулачків 2, що значно полегшить виведення кулачків у заданий робочий діапазон. В даній конструкції для зменшення масогабаритних розмірів та інерційності використовується оборотний пневмоциліндр мінімальних розмірів, а створення потрібної сили затиску відбувається за рахунок самогальмувальної властивості архімедової спіралі. Компактна конструкція даного захватного пристрою з широким діапазоном захвата придатна для здійснення завантажувально-розвантажувальних робіт при обслуговуванні роботизованих комплексів. Використані джерела: 1. 3-х к улачковый схват. Серия CGC . http://www.arhimed.net/catalogue/pneumatics/cylinders/60_2004_l1830.pdf
ДивитисяДодаткова інформація
Назва патенту англійськоюGripping device of industrial robot
Автори англійськоюPavlenko Ivan Ivanovych, Hodunko Maksym Olehovych, Mazhara Vitalii Anatoliiovych
Назва патенту російськоюЗахватное устройство промышленного робота
Автори російськоюПавленко Иван Иванович, Годунко Максим Олегович, Мажара Виталий Анатольевич
МПК / Мітки
МПК: B23Q 7/04, B23B 15/00
Мітки: пристрій, захватний, промислового, робота
Код посилання
<a href="https://ua.patents.su/1-24280-zakhvatnijj-pristrijj-promislovogo-robota.html" target="_blank" rel="follow" title="База патентів України">Захватний пристрій промислового робота</a>
Двозахватний пристрій промислового робота

Номер патенту: 15774
Опубліковано: 17.07.2006
Автори: Павленко Іван Іванович, Мажара Віталій Анатолійович
МПК: F16S 5/00
Мітки: робота, пристрій, двозахватний, промислового
Формула / Реферат:
1. Двозахватний пристрій промислового робота для одночасного затиску двох деталей, що складається з важелів з губками, вилки та тяги, які приєднані до кронштейна, обертового пневмоциліндра та пневмоциліндра розтиску, який відрізняється тим, що пневмоциліндр розтиску винесений за межі захватного пристрою.2. Двозахватний пристрій промислового робота за п. 1, який відрізняється тим, що розтиск захвату можливий лише в робочій...
Двозахоплювальний пристрій промислового робота

Номер патенту: 18300
Опубліковано: 15.11.2006
Автори: Мажара Віталій Анатолійович, Павленко Іван Іванович
МПК: B65H 09/00
Мітки: промислового, пристрій, двозахоплювальний, робота
Формула / Реферат:
Двозахоплювальний пристрій промислового робота для одночасного затискання двох деталей, що складається з корпусу, в якому розміщені шток-рейка, з поршнем всередині, та рейкове колесо, пневмоциліндра, важеля, фланця та захоплювачів, який відрізняється тим, що його устатковано рейковим механізмом, а один із захоплювачів виконано підпружиненим.
Адаптивний захватний пристрій інтелектуального робота

Номер патенту: 14569
Опубліковано: 15.05.2006
Автори: Кондратенко Юрій Пантелійович, Швець Едуард Анатолійович
МПК: B25J 15/00
Мітки: робота, пристрій, адаптивний, захватний, інтелектуального
Формула / Реферат:
Адаптивний захватний пристрій інтелектуального робота, що містить кінематично зв'язані з приводом губки, принаймні на одній з яких встановлено перший і другий датчики стискального зусилля, зв'язані з блоком керування приводом губок, інтерфейс якого містить чотири входи і чотири виходи, у губках виконані напрямні пази, у яких з можливістю переміщення встановлені пружно зв'язані з відповідною губкою рухливі елементи, які мають можливість...
Двозахватний пристрій промислового робота

Номер патенту: 18720
Опубліковано: 15.11.2006
Автори: Мажара Віталій Анатолійович, Годунко Максим Олегович, Павленко Іван Іванович
МПК: B25J 18/00, B23Q 3/06
Мітки: промислового, двозахватний, робота, пристрій
Формула / Реферат:
1. Двозахватний пристрій промислового робота для одночасного затиску двох деталей, який складається з механізму зміни захватів місцями, фланця, кисті та захватів, який відрізняється тим, що його устатковано гальмівним механізмом, а вісь захвату виконано паралельно осі руки робота.2. Двозахватний пристрій промислового робота за п. 1, який відрізняється тим, що як гальмівний механізм використано гідравлічні демпфери.
Захоплювач промислового робота
Номер патенту: 18644
Опубліковано: 15.11.2006
Автори: Марченко Юрій Олексійович, Ткачук Юрій Якович
МПК: B25J 15/04
Мітки: промислового, захоплювач, робота
Формула / Реферат:
1. Захоплювач промислового робота, що містить корпус, губки захоплювача, виконані у вигляді встановлених із можливістю поздовжнього переміщення підпружинених елементів із робочою частиною у вигляді загостреної голки, який відрізняється тим, що загострена голка виконана розрізною по міделеву перерізу, при цьому одна з половин голки виконана нерухомою і жорстко скріплена з корпусом перпендикулярно його поверхні, а друга половина - шарнірно...
Попередній патент: Спосіб отримання утфелю першої кристалізації
Наступний патент: Процес виготовлення бочки
Випадковий патент: Спосіб прогнозування функціональних порушень у стані здоров'я дітей із регіонів екологічного неблагополуччя