Мехатронний привод системи автоматичного керування положенням шпинделя
Номер патенту: 90629
Опубліковано: 10.06.2014
Автори: Сапон Сергій Петрович, Федориненко Дмитро Юрійович, Бойко Сергій Васильович

Формула / Реферат
1. Мехатронний привод системи автоматичного керування положенням шпинделя, встановленого на регульовані гідростатичні опори, який містить нерухому конічну втулку, гідростатичну втулку з різзю на хвостовій частині, зубчасте колесо, який відрізняється тим, що схема приводу містить кроковий двигун, який дозволяє повертати зубчасте колесо з урахуванням компенсації люфту в зубчастій передачі і мікропроцесорний пристрій керування, який збільшує швидкодію системи і виключає появу автоколивань.
2. Мехатронний привод системи автоматичного керування положенням шпинделя за п. 1, який відрізняється тим, що містить безконтактні вимірювачі, які не потребують підсилювально-перетворюючих пристроїв та мають можливість виводу вихідного сигналу як в аналоговій, так і цифровій формі.
3. Мехатронний привод системи автоматичного керування положенням шпинделя за п. 1, який відрізняється тим, що в алгоритмі керування передбачене повернення системи у вихідне положення, що відповідає реверсу зазору в регульованій гідростатичній опорі.
Текст
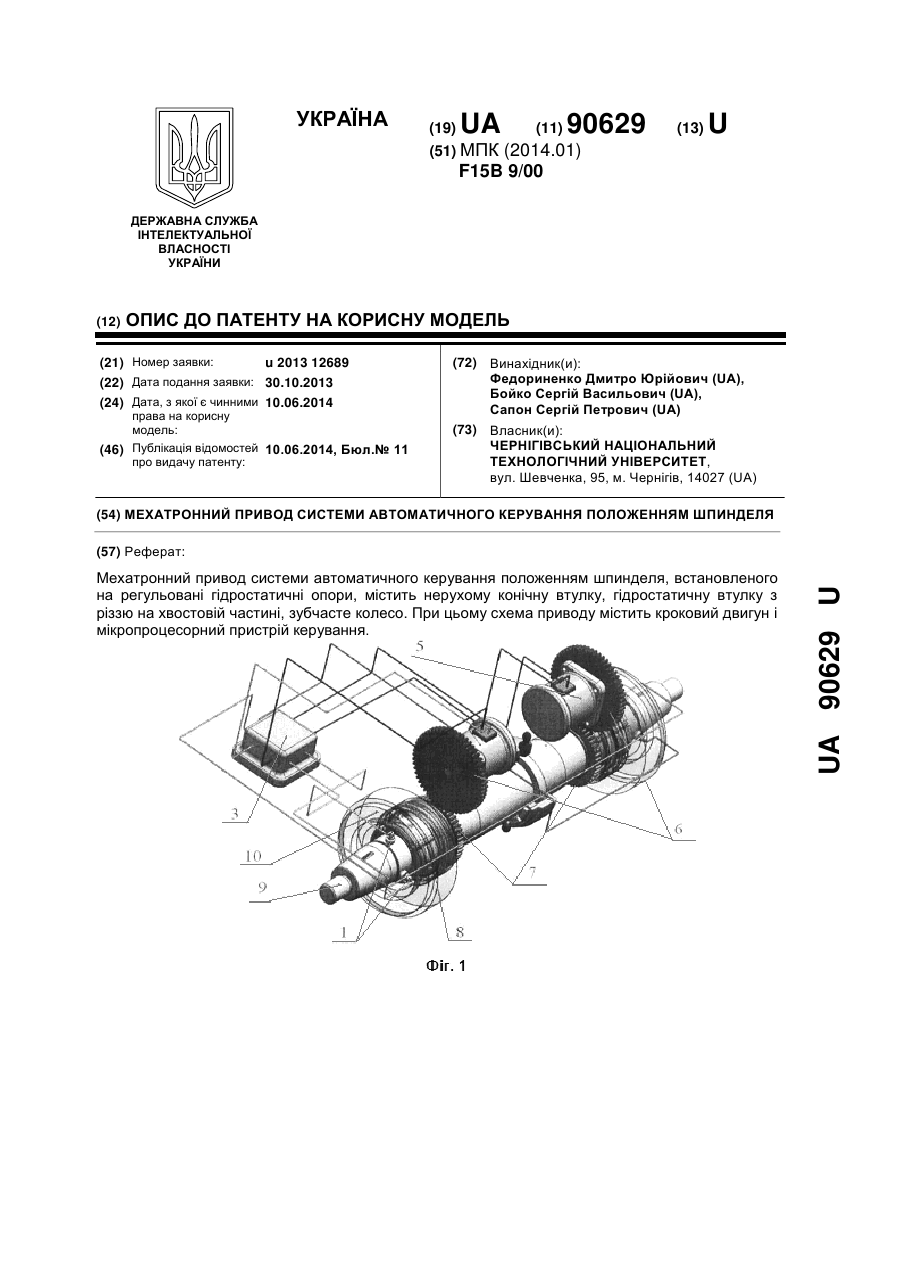
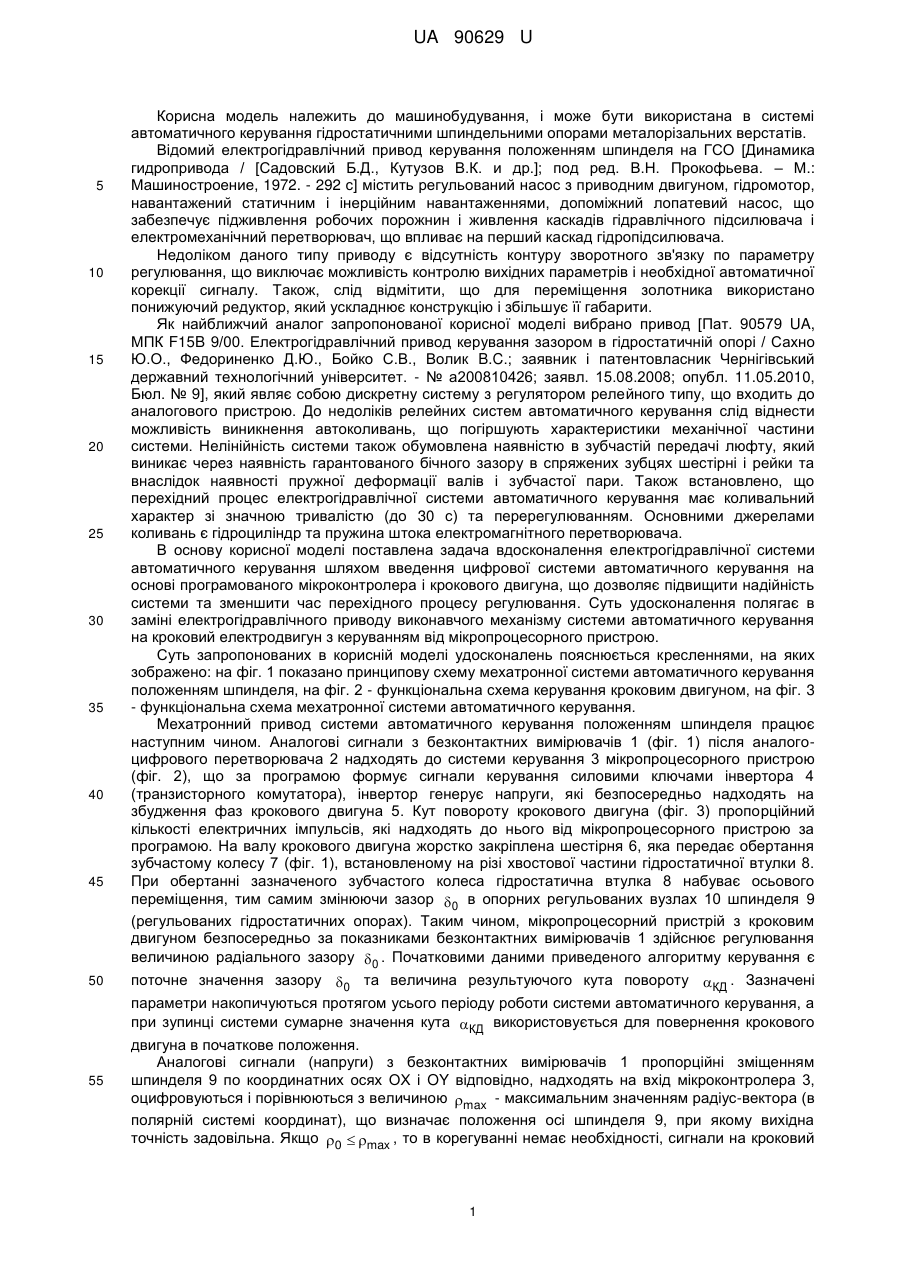
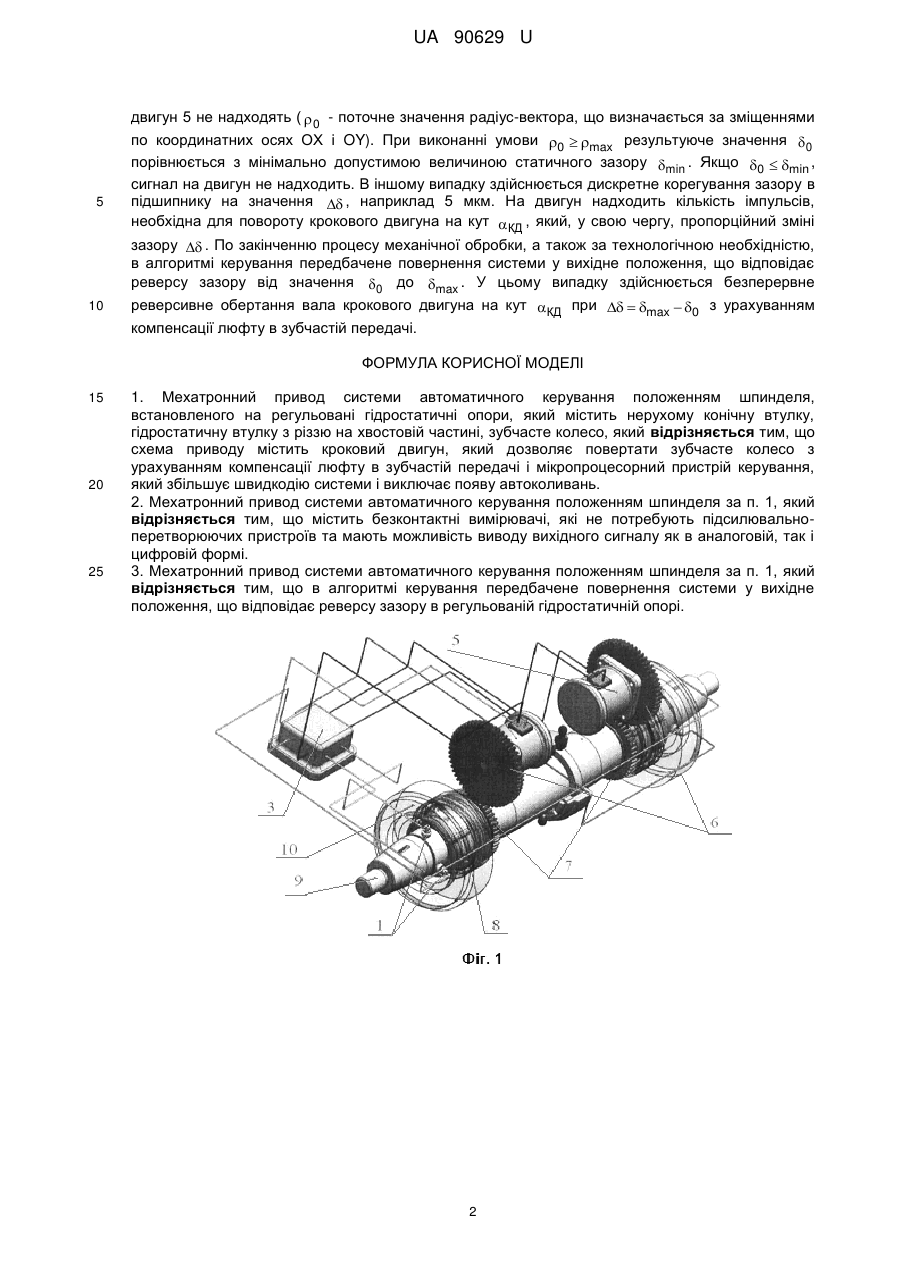
Реферат: UA 90629 U UA 90629 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до машинобудування, і може бути використана в системі автоматичного керування гідростатичними шпиндельними опорами металорізальних верстатів. Відомий електрогідравлічний привод керування положенням шпинделя на ГСО [Динамика гидропривода / [Садовский Б.Д., Кутузов В.К. и др.]; под ред. В.Н. Прокофьева. – М.: Машиностроение, 1972. - 292 с] містить регульований насос з приводним двигуном, гідромотор, навантажений статичним і інерційним навантаженнями, допоміжний лопатевий насос, що забезпечує підживлення робочих порожнин і живлення каскадів гідравлічного підсилювача і електромеханічний перетворювач, що впливає на перший каскад гідропідсилювача. Недоліком даного типу приводу є відсутність контуру зворотного зв'язку по параметру регулювання, що виключає можливість контролю вихідних параметрів і необхідної автоматичної корекції сигналу. Також, слід відмітити, що для переміщення золотника використано понижуючий редуктор, який ускладнює конструкцію і збільшує її габарити. Як найближчий аналог запропонованої корисної моделі вибрано привод [Пат. 90579 UA, МПК F15B 9/00. Електрогідравлічний привод керування зазором в гідростатичній опорі / Сахно Ю.О., Федориненко Д.Ю., Бойко С.В., Волик B.C.; заявник і патентовласник Чернігівський державний технологічний університет. - № а200810426; заявл. 15.08.2008; опубл. 11.05.2010, Бюл. № 9], який являє собою дискретну систему з регулятором релейного типу, що входить до аналогового пристрою. До недоліків релейних систем автоматичного керування слід віднести можливість виникнення автоколивань, що погіршують характеристики механічної частини системи. Нелінійність системи також обумовлена наявністю в зубчастій передачі люфту, який виникає через наявність гарантованого бічного зазору в спряжених зубцях шестірні і рейки та внаслідок наявності пружної деформації валів і зубчастої пари. Також встановлено, що перехідний процес електрогідравлічної системи автоматичного керування має коливальний характер зі значною тривалістю (до 30 с) та перерегулюванням. Основними джерелами коливань є гідроциліндр та пружина штока електромагнітного перетворювача. В основу корисної моделі поставлена задача вдосконалення електрогідравлічної системи автоматичного керування шляхом введення цифрової системи автоматичного керування на основі програмованого мікроконтролера і крокового двигуна, що дозволяє підвищити надійність системи та зменшити час перехідного процесу регулювання. Суть удосконалення полягає в заміні електрогідравлічного приводу виконавчого механізму системи автоматичного керування на кроковий електродвигун з керуванням від мікропроцесорного пристрою. Суть запропонованих в корисній моделі удосконалень пояснюється кресленнями, на яких зображено: на фіг. 1 показано принципову схему мехатронної системи автоматичного керування положенням шпинделя, на фіг. 2 - функціональна схема керування кроковим двигуном, на фіг. 3 - функціональна схема мехатронної системи автоматичного керування. Мехатронний привод системи автоматичного керування положенням шпинделя працює наступним чином. Аналогові сигнали з безконтактних вимірювачів 1 (фіг. 1) після аналогоцифрового перетворювача 2 надходять до системи керування 3 мікропроцесорного пристрою (фіг. 2), що за програмою формує сигнали керування силовими ключами інвертора 4 (транзисторного комутатора), інвертор генерує напруги, які безпосередньо надходять на збудження фаз крокового двигуна 5. Кут повороту крокового двигуна (фіг. 3) пропорційний кількості електричних імпульсів, які надходять до нього від мікропроцесорного пристрою за програмою. На валу крокового двигуна жорстко закріплена шестірня 6, яка передає обертання зубчастому колесу 7 (фіг. 1), встановленому на різі хвостової частини гідростатичної втулки 8. При обертанні зазначеного зубчастого колеса гідростатична втулка 8 набуває осьового переміщення, тим самим змінюючи зазор 0 в опорних регульованих вузлах 10 шпинделя 9 (регульованих гідростатичних опорах). Таким чином, мікропроцесорний пристрій з кроковим двигуном безпосередньо за показниками безконтактних вимірювачів 1 здійснює регулювання величиною радіального зазору 0 . Початковими даними приведеного алгоритму керування є поточне значення зазору 0 та величина результуючого кута повороту КД . Зазначені параметри накопичуються протягом усього періоду роботи системи автоматичного керування, а при зупинці системи сумарне значення кута КДвикористовується для повернення крокового двигуна в початкове положення. Аналогові сигнали (напруги) з безконтактних вимірювачів 1 пропорційні зміщенням шпинделя 9 по координатних осях ОХ і OY відповідно, надходять на вхід мікроконтролера 3, оцифровуються і порівнюються з величиною max - максимальним значенням радіус-вектора (в полярній системі координат), що визначає положення осі шпинделя 9, при якому вихідна точність задовільна. Якщо 0 max , то в корегуванні немає необхідності, сигнали на кроковий 1 UA 90629 U двигун 5 не надходять ( 0 - поточне значення радіус-вектора, що визначається за зміщеннями по координатних осях ОХ і OY). При виконанні умови 0 max результуюче значення 0 5 порівнюється з мінімально допустимою величиною статичного зазору min . Якщо 0 min , сигнал на двигун не надходить. В іншому випадку здійснюється дискретне корегування зазору в підшипнику на значення , наприклад 5 мкм. На двигун надходить кількість імпульсів, необхідна для повороту крокового двигуна на кут КД , який, у свою чергу, пропорційний зміні зазору . По закінченню процесу механічної обробки, а також за технологічною необхідністю, в алгоритмі керування передбачене повернення системи у вихідне положення, що відповідає реверсу зазору від значення 0 до max . У цьому випадку здійснюється безперервне 10 реверсивне обертання вала крокового двигуна на кут КД при max 0 з урахуванням компенсації люфту в зубчастій передачі. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 1. Мехатронний привод системи автоматичного керування положенням шпинделя, встановленого на регульовані гідростатичні опори, який містить нерухому конічну втулку, гідростатичну втулку з різзю на хвостовій частині, зубчасте колесо, який відрізняється тим, що схема приводу містить кроковий двигун, який дозволяє повертати зубчасте колесо з урахуванням компенсації люфту в зубчастій передачі і мікропроцесорний пристрій керування, який збільшує швидкодію системи і виключає появу автоколивань. 2. Мехатронний привод системи автоматичного керування положенням шпинделя за п. 1, який відрізняється тим, що містить безконтактні вимірювачі, які не потребують підсилювальноперетворюючих пристроїв та мають можливість виводу вихідного сигналу як в аналоговій, так і цифровій формі. 3. Мехатронний привод системи автоматичного керування положенням шпинделя за п. 1, який відрізняється тим, що в алгоритмі керування передбачене повернення системи у вихідне положення, що відповідає реверсу зазору в регульованій гідростатичній опорі. 2 UA 90629 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюFedorynenko Dmytro Yuriiovych, Boiko Serhii Vasyliovych
Автори російськоюФедориненко Дмитрий Юрьевич, Бойко Сергей Васильевич
МПК / Мітки
МПК: F15B 9/00
Мітки: автоматичного, системі, керування, шпинделя, положенням, привод, мехатронний
Код посилання
<a href="https://ua.patents.su/5-90629-mekhatronnijj-privod-sistemi-avtomatichnogo-keruvannya-polozhennyam-shpindelya.html" target="_blank" rel="follow" title="База патентів України">Мехатронний привод системи автоматичного керування положенням шпинделя</a>
Пристрій керування положенням антени радіолокаційної станції комплексної системи захисту корабля
Номер патенту: 83797
Опубліковано: 25.09.2013
Автори: Ліпатов Валерій Павлович, Гузь Володимир Іванович, Баранчук Олександр Іванович, Піронер Ян Михайлович, Стецюк Володимир Леонтійович, Долеско Анатолій Олександрович
МПК: H01Q 1/34
Мітки: корабля, системі, станції, пристрій, керування, положенням, комплексної, захисту, радіолокаційної, антени
Формула / Реферат:
Пристрій керування положенням антени радіолокаційної станції комплексної системи захисту корабля, що містить приймально-передавальну антену з електронною апаратурою радіолокаційної станції, які з'єднані високочастотним хвилевідним трактом з багатоканальними обертовим та поворотними зчленуваннями, та приводи повороту та обертання, причому зазначені приводи містять електродвигуни з механічними передачами, редукторами та обмежуючими упорами,...
Спосіб визначення динамічної крутильної жорсткості шпинделя механічної системи з чпк
Номер патенту: 27534
Опубліковано: 12.11.2007
Автори: Мироненко Євгеній Васильович, Марчук Євген Вячеславович, Шишкін Артем Вікторович, Донченко Євгеній Іванович
МПК: G01L 01/22, G01H 11/00
Мітки: системі, спосіб, механічної, визначення, шпинделя, динамічної, чпк, жорсткості, крутильної
Формула / Реферат:
Спосіб визначення динамічної крутильної жорсткості шпинделя механічної системи з ЧПК з визначенням моменту двигуна за величинами струму і напруги, що подаються на електродвигун, і вимірюванням швидкості робочого ходу ротаційного механізму датчиком кута обертання, встановленим на його валу, який відрізняється тим, що кут скручування шпиндельного вузла визначається як різниця кількості імпульсів датчика кута обертання в моменти появи імпульсу...
Система керування положенням платформи
Номер патенту: 48332
Опубліковано: 15.08.2002
Автори: Смоляков Василь Андрійович, Магерамов Лютфалій Курбан-Алієвич, Безлепкін Олександр Андрійович, Васильченков Олег Георгійович, Ребров Олексій Анатолійович, Качанов Петро Олексійович, Лещенко В'ячеслав Михайлович, Наплеков Михайло Іванович, Бусяк Юрій Митрофанович, Головіна Олена Василівна
МПК: G05D 1/08
Мітки: платформи, положенням, керування, система
Формула / Реферат:
Система керування положенням платформи, що містить контролер персонального комп'ютера, з'єднаний із трьома електроприводами, кожний з яких містить послідовно з'єднані цифровий регулятор, електродвигун, кінематично зв'язаний з редуктором, що обладнаний датчиком положення вихідного вала редуктора i за допомогою кривошипно-шатунного механізму з'єднаний із платформою, причому до другого i третього входів цифрового регулятора відповідно...
Електрогідравлічний привод керування зазором в гідростатичній опорі
Номер патенту: 90579
Опубліковано: 11.05.2010
Автори: Федориненко Дмитро Юрійович, Сахно Юрій Олексійович, Бойко Сергій Васильович, Волик Віктор Сергійович
МПК: F15B 9/00
Мітки: електрогідравлічний, зазором, опори, керування, привод, гідростатичний
Формула / Реферат:
Електрогідравлічний привод керування зазором в гідростатичній опорі від гідроциліндра за допомогою зубчатої і гвинтової передачі, який відрізняється тим, що привод оснащено контуром зворотного зв'язку по вихідному сигналу, який містить блок датчиків для фіксації рівня коливань шпинделя, аналізатор коливань - для обробки інформації, що надходить з датчиків і електрогідравлічний перетворювач для задання керуючого сигналу.
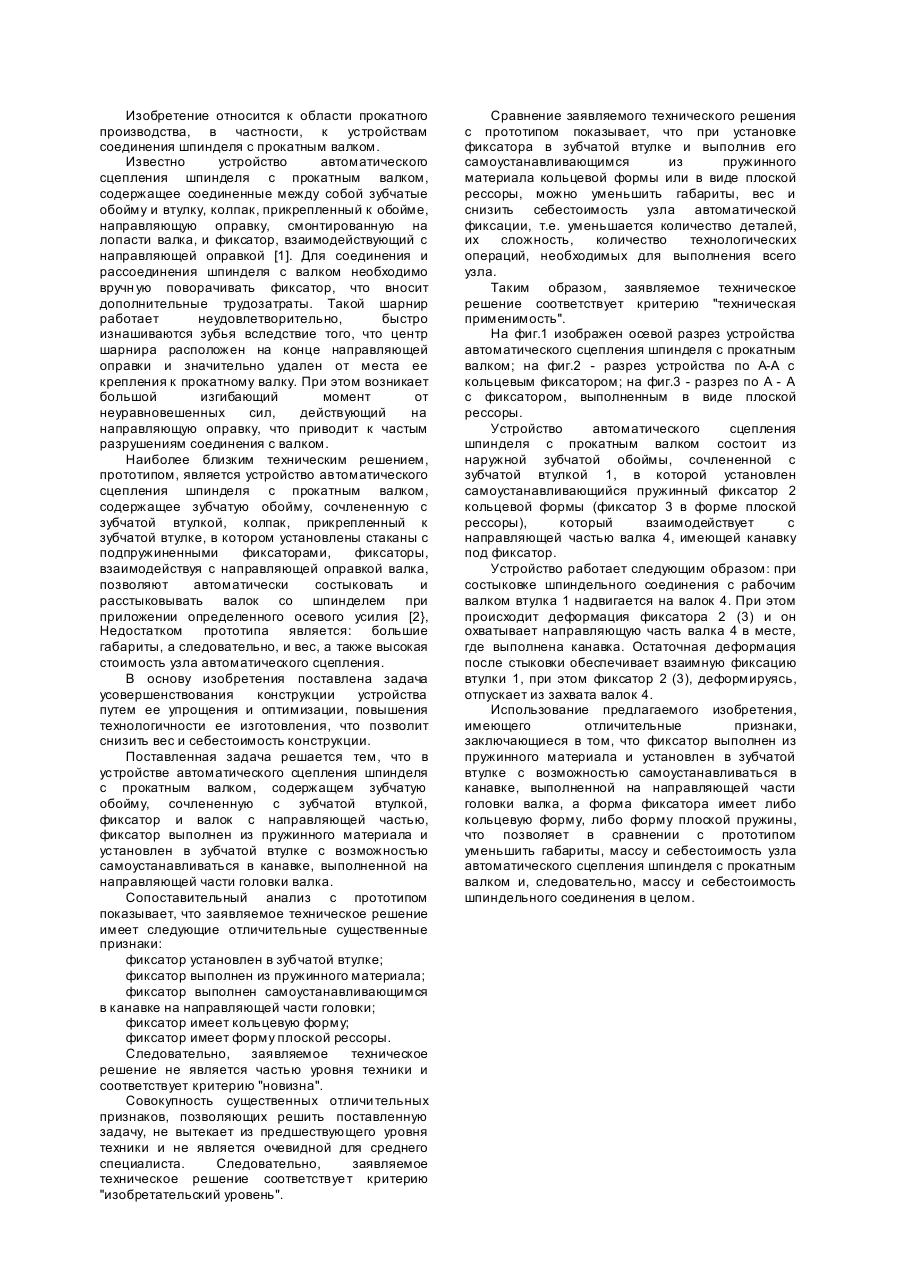
Пристрій автоматичного з’єднання шпинделя з прокатним валком
Номер патенту: 15316
Опубліковано: 30.06.1997
Автори: Комаров Олександр Миколайович, Фурманський Євген Ілліч
МПК: B21B 35/14
Мітки: з'єднання, пристрій, прокатним, автоматичного, шпинделя, валком
Формула / Реферат:
1. Устройство автоматического сцепления шпинделя с прокатным валком, содержащее зубчатую обойму, сочлененную с зубчатой втулкой, фиксатор и валок с направляющей частью, отличающееся тем, что фиксатор выполнен из пружинного материала и установлен в зубчатой втулке с возможностью самоустанавливаться в канавке, выполненной на направляющей части головки валка.2. Устройство по п.1, отличающееся тем, что фиксатор имеет кольцевую...
Попередній патент: Настільна гра “віззл”
Наступний патент: Порошковий дріт для обробки металургійних розплавів
Випадковий патент: Гра